
Abstract
In this paper, we deal with a class of boundary-value problems for the singularly perturbed Fredholm integro-differential equation. To solve the problem, we construct a new difference scheme by the method of integral identities using interpolating quadrature rules with remainder terms in integral form. We prove that the method is convergent in the discrete maximum norm, uniformly with respect to the perturbation parameter. We present numerical experiments which support the theoretical results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
We are interested in the numerical solution of the singularly perturbed Fredholm integro-differential equations (SPFIDEs) of the form:
where \(0<\varepsilon \ll 1\) is the singular perturbation parameter, A and B are given real constants, \(\lambda \) is a real parameter, \(\varOmega =\left( 0,l\right) \), and\(\ \bar{\varOmega }=\left[ 0,l\right] \). \(a(x)\ge \alpha >0,\) f(x) (\(x\in \bar{\varOmega }\)) and K(x, t) (\((x,t)\in \bar{\varOmega }\times \bar{\varOmega }\)) are given sufficiently smooth functions (their actual degree of smoothness is specified below) satisfying certain regularity conditions to be specified. The existences and the uniqueness of the solution of SPFIDEs can be found in Lange and Smith (1988), Omel’chenko and Nefedov (2002) and references therein.
Since singularly perturbed problems arise in many applications of science and engineering (such as fluid dynamics, quantum mechanics, plasticity, oceanography, meteorology, reaction–diffusion processes, and mathematical model of chemical reactions), the studies for the approximate solutions of these problems are increasing from day to day (Cakir et al. 2016a, b; Cimen and Cakir 2017; Farell et al. 2000; O’Riordan et al. 2003; Roos et al. 2008; Smith 1985).
It is well known that the usual discretization methods for solving singularly perturbed problems are unstable and do not give satisfactory results for sufficiently small values of \(\varepsilon \). Therefore, it is necessary to construct uniform numerical methods to solve such problems (Cimen and Cakir 2017; Farell et al. 2000; Roos et al. 2008).
However, singularly perturbed integral equations or integro-differential equations appear in population dynamics, polymer rheology, and mathematical model of glucose tolerance (Brunner and van der Houwen 1986; De Gaetano and Arino 2000; Jerri 1999; Lodge et al. 1978). In particular, singularly perturbed Fredholm integral equation is given by optimal control problems Nefedov and Nikitin (2007). Some asymptotic approaches for this problem have discussed in (Lange and Smith 1993; Nefedov and Nikitin 2000, 2007). In recent years, many methods have proposed by authors in Amiraliyev and Sevgin (2006), Amiraliyev and Yilmaz (2014), Bijura (2002), Kauthen (1997), Kudu et al. (2016), Ramos (2008), Salama and Bakr (2007), and Tao and Zhang (2019) for the approximate solution of the singularly perturbed Volterra integro-differential equation. However, the numerical approaches of SPFIDEs are not studied in literature so far. Motivating from these studies, our goal is to present an efficient numerical solution for the problem (1.1) and (1.2). Therefore, we first examine some properties of the exact solution of (1.1) and (1.2) in Sect. 2. In Sect. 3, we present a finite difference scheme which is constructed by the method of integral identities with the use of interpolating quadrature rules with the weight and remainder terms in integral form. We analyze the error estimates for the approximate solution and we prove the uniform convergence result for the scheme in Sect. 4. Finally, in Sect. 5, we present an example that confirms the theoretical results.
Notation Throughout the paper, C denotes a generic positive constant that is independent of both the perturbation and the mesh parameter. In addition, fixed constants of this kind are indicated by subscripting C. \(C^{n}(\bar{\varOmega })\) denotes the space of real-valued functions which are n-times continuously differentiable on \(\bar{\varOmega }\). \(C_{m}^{n}(\bar{\varOmega }\times \bar{\varOmega })\) denotes the space of two variable real-valued functions which are n-times continuously differentiable with respect to the first variable and m-times continuously differentiable with respect to the second variable on \(\bar{\varOmega }\times \bar{\varOmega }\). For any continuous function \(g\left( x\right) \) defined on the corresponding interval, we use the maximum norm \( \left\| g \right\| _{\infty } = \max _{{\left[ {0,l} \right] }} \left| {g\left( x \right) } \right| \) and \(\left\| g\right\| _{1}=\int _{0}^{l}\left| g\left( x\right) \right| \mathrm{{d}}x,\) \(\overline{K}=\max _{x\in \bar{\varOmega } }\int _{0}^{l}\left| K(x,t)\right| \mathrm{{d}}t.\)
2 Asymptotic estimates
Here, we give useful asymptotic estimates of the exact solution of the problem (1.1) and (1.2) that are needed in later sections.
Lemma 1
Assume that a, \(f\in C(\bar{\varOmega }),\) \(K\in C_{1}^{1}(\bar{\varOmega } \times \bar{\varOmega })\) with \(a(x)\ge \alpha >0,\) and:
Then, the solution u of the problem (1.1)–(1.2) satisfies the inequalities:
where
and
Proof
First, we prove (2.1). First of all, we consider the Green’s function of the operator:
which is defined as similar to Andreev (2002):
where the functions \(v_{1}(x)\) and \(v_{2}(x)\) are the solutions of the following initial value problems:
and
Thus, similar to work of Amiraliyev and Cimen (2010), for the solution u of the problem (1.1) and (1.2), we can write:
with
From (2.4), we obtain:
and also for Green’s function known as formula (2.3) is valid \(0\le G(x,\xi )\le \alpha ^{-1}\) in Andreev (2002). Using this inequality, from (2.5), we obtain:
from which (2.1) follows immediately. Second, from (1.1), we have:
Integrating (2.6) over \(\left( 0,x\right) \), we get:
from which by setting the boundary condition \(u(l)=B\), we obtain:
Since
and
from (2.7), we are led to:
We see from (2.6) that:
which along with (2.8) leads to (2.2). Thus, the proof of lemma completes. \(\square \)
3 Discretization and mesh
We will construct the new finite difference scheme for approximate solution of the problem (1.1) and (1.2) in this section. At first, we denote by \(\omega _{h}\) a uniform mesh on \(\varOmega \):
To simplify the notation, we set \(g_{i}=g\left( x_{i}\right) \) for any function \(g\left( x\right) \), while \(y_{i}\) denotes an approximation of \( u\left( x\right) \) at \(x_{i}\). For any mesh function \(g\left( x_{i}\right) \) defined on \(\bar{\omega }_{h}\), we use:
and
To obtain difference approximation for (1.1) and (1.2), we start with the following identity:
with the basis functions:
where \(\varphi _{i}^{(1)}(x)\) and \(\varphi _{i}^{(2)}(x)\) are the solutions of the following problems, respectively:
and
If we rearrange (3.1) (except for the integral term containing kernel function), we get:
Furthermore, using the integration by parts to the first integral term on the left side of this equation, we get:
where
By considering the interpolating quadrature rules (2.1) and (2.2) in Amiraliyev and Mamedov (1995) with weight functions \(\varphi _{i}(x)\) on subintervals \(\left( x_{i-1},x_{i+1}\right) \) in (3.2), we obtain the following precise relation:
where
which, clearly, satisfy:
Upon substituting
into (3.5), we get:
where
Thus:
On the other hand, for integral term involving kernel function, we have from (3.1):
with remainder term:
and \(T_{0}(x)=1,x>0;T_{0}(x)=0,x\le 0\). Further using the composite right side rectangle rule, we obtain:
In the consequence, from (3.2), (3.8), and (3.10), it follows the relation:
with
where \(R_{i}^{(k)},\) (\(k=1,2,3,4\)) are determined by (3.3), (3.4), (3.9), and (3.11), respectively.
As a consequence of (3.12), we propose the following difference scheme for approximating the problem (1.1) and (1.2):
where \(\theta _{i}\) is given by (3.7).
4 Convergence analysis of the method
In this section, we analyze the convergence of our present method. We begin with the error function that is defined by \(z_{i}=y_{i}-u_{i},\) \(0\le i\le N.\) Thus, the error function \(z_{i}\) satisfies:
Lemma 2
Let \(a,f\in C^{1}(\bar{\varOmega })\) and \(K\in C_{1}^{1}(\bar{\varOmega }\times \bar{ \varOmega })\). Under the conditions of Lemma 1, the errors \({R}_{i}\) satisfy the following inequality:
Proof
We estimate \({R}_{i}^{(k)},\) \((k=1,2,3,4)\) separately. For \({R}_{i}^{(1)}\), using the mean value theorem for the functions in (3.3), we get:
Taking into consideration \(0<{\varphi }_{i}{(x)}\le 1\) and (2.2) in (4.4), we obtain:
For \({R}_{i}^{(2)}\) in (3.4), we analogously have:
Therefore:
For \(R_{i}^{(3)}\) in (3.9), we get:
Due to \(h^{-1}\int _{x_{i-1}}^{x_{i+1}}\mathrm{{d}}x{\varphi _{i}(x)=1}\), we have:
Since \(\left| \frac{\partial K(x,t)}{\partial x}\right| \le C\) and \( \left| u\right| \le C_{0}\), we have:
Finally, for \(R_{i}^{(4)}\), from (3.11), we get:
Since \(\left| \frac{\partial K(x,t)}{\partial t}\right| \le C,\) \( \left| u\right| \le C_{0}\) and using (2.2), we have:
Consequently:
Thus, taking into account (4.5) and (4.8) in (3.13), we obtain (4.3). \(\square \)
Lemma 3
Let the error function z be the solution of the problem (4.1) and (4.2) and \(\left| \lambda \right| <\alpha /(\widetilde{K}l).\) Then, the following inequality
holds.
Proof
Here, we will use the discrete Green’s function \(G^{h}(x_{i},\xi _{j})\) for the operator:
Namely, the \(G^{h}(x_{i},\xi _{j})\) is defined as a function of \(x_{i}\) for fixed \(\xi _{j}\) :
where \(\delta ^{h}(x_{i},\xi _{j})=h^{-1}\delta _{ij}\) and \(\delta _{ij}\) is the Kronecker delta. For the solution of problem (4.1) and (4.2), the following relation can be written by using the Green’s function:
It can be shown in a manner similar to Andreev (2002) that \(0\le G^{h}(x_{i},\xi _{k})\le \alpha ^{-1}\). Thus, from (4.10), we can write the following estimate:
which implies validity of (4.9). \(\square \)
Finally, we give the main result on \(\varepsilon \)-uniform convergence of the presented method for solving the problem (1.1) and (1.2).
Theorem 1
Assume that \(a,f\in C^{1}(\bar{\varOmega })\) and \(K\in C_{1}^{1}(\bar{\varOmega } \times \bar{\varOmega })\). If u is the solution of (1.1) and (1.2) and y is the solution of (3.14) and (3.15), then the following \( \varepsilon \)-uniform estimate satisfies:
Proof
Combining the previous lemmas, we immediately have (4.11). \(\square \)
5 Algorithm and numerical results
In this section, we suggest the following iterative technique for solving problem (3.14) and (3.15). In addition, we consider an example of problem (1.1) and (1.2) to demonstrate the effectiveness and accuracy of the our present method.

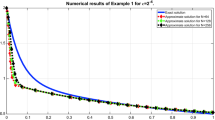
Numerical results of Example 1 for \(\varepsilon =2^{-4}\)

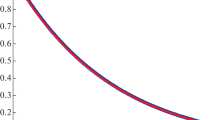
Numerical results of Example 1 for \(\varepsilon =2^{-20}\)
At first, if we reformulate (3.14), then we can write:
\(n=1,2,\ldots \), \(y_{i}^{(0)}\) (\(1\le i\le N-1\)) are given and stopping criterion is:
For the iterative error \(z_{i}^{(n)}=y_{i}^{(n)}-y_{i}\) from (3.14) and (3.15) and (5.1) and (5.2), we have:
According to maximum principle:
with
For \(\left| \lambda \right| <1/\widetilde{K}\), the iterative process is evidently convergent.
Example 1
We consider the following test problem:
The exact solution of the problem is given by:
where
We define the exact error \(e_{\varepsilon }^{N}\) and the computed parameter-uniform maximum pointwise error \(e^{N}\) as follows:
where y is the numerical approximation to u for various values of \( \varepsilon \) and N. We also define the computed parameter-uniform rate of convergence to be:
The values of \(\varepsilon \) for which we solve the test problem are \( \varepsilon =2^{-4i}\), \(i=0,1,\ldots ,6\). Furthermore, the resulting errors and the corresponding numbers \(p^{N}\) obtained by taking \(y_{i}^{(0)}=x_{i}^{2}\) for the test problem are listed in Table 1.
6 Conclusion
We presented a new approach to solve the singularly perturbed problem for a convection–diffusion Fredholm integro-differential equation. The approach was based on an exponentially fitted difference scheme on a uniform mesh. As a consequence, we proved that our method is the first order convergent with respect to the perturbation parameter in the discrete maximum norm. Moreover, after only a few iterations, the computational errors and the rates of convergence for the test problem were presented for different values of the perturbation parameter \(\varepsilon \) and N in Table 1. Also, the graphs of the numerical solution of the test problem for different values of perturbation parameter were plotted in Figs. 1 and 2. When the numerical results in both Table 1 and Figs. 1 and 2 were examined, the results showed that the presented method was effective and accuracy. We point out that the presented method in this paper can be extended to other type of boundary-value problems such as nonlinear SPFIDEs and reaction diffusion SPFIDEs.
References
Amiraliyev GM, Cimen E (2010) Numerical method for a singularly perturbed convection–diffusion problem with delay. Appl Math Comput 216:2351–2359
Amiraliyev GM, Mamedov YD (1995) Difference schemes on the uniform mesh for a singularly perturbed pseudo-parabolic equations. Turk J Math 19:207–222
Amiraliyev GM, Sevgin S (2006) Uniform difference method for singularly perturbed Volterra integro-differential equations. Appl Math Comput 179:731–741
Amiraliyev GM, Yilmaz B (2014) Fitted difference method for a singularly perturbed initial value problem. Int J Math Comput 22:1–10
Andreev VB (2002) Pointwise and weighted a priori estimates of the solution and its first derivative for a singularly perturbed convection diffusion equation. Differ Equ 38:972–984
Bijura AM (2002) Singularly perturbed Volterra integro-differential equations. Quaest Math 25:229–248
Brunner H, van der Houwen PJ (1986) The numerical solution of Volterra equations CWI monographs. North-Holland, Amsterdam
Cakir M, Amirali I, Kudu M, Amiraliyev GM (2016a) Convergence analysis of the numerical method for a singularly perturbed periodical boundary value problem. J Math Comput Sci 16:248–255
Cakir M, Cimen E, Amirali I, Amiraliyev GM (2016b) Numerical treatment of a quasilinear initial value problem with boundary layer. Int J Comput Math 93(11):1845–1859
Cimen E, Cakir M (2017) Numerical treatment of nonlocal boundary value problem with layer behaviour. Bull Belg Math Soc 24(3):339–352
De Gaetano A, Arino O (2000) Mathematical modelling of the intravenous glucose tolerance test. J Math Biol 40:136–168
Farell PA, Hegarty AF, Miller JJH, O’Riordan E, Shishkin GI (2000) Robust computational techniques for boundary layers. Chapman Hall/CRC, New York
Jerri A (1999) Introduction to integral equations with applications. Wiley, New York
Kauthen JP (1997) A survey on singularly perturbed Volterra equations. Appl Numer Math 24:95–114
Kudu M, Amirali I, Amiraliyev GM (2016) A finite-difference method for singularly perturbed delay integro-differential equation. J Comput Appl Math 308:379–390
Lange CG, Smith DR (1988) Singular perturbation analysis of integral equations. Stud Appl Math 79(1):1–63
Lange CG, Smith DR (1993) Singular perturbation analysis of integral equations: part II. Stud Appl Math 90(1):1–74
Lodge AS, McLeod JB, Nohel JAA (1978) Nonlinear singularly perturbed Volterra integro differential equation occurring in polymer rheology. Proc R Soc Edinb Sect A 80:99–137
Nefedov NN, Nikitin AG (2000) The asymptotic method of differential inequalities for singularly perturbed integro-differential equations. Differ Equ 36(10):1544–1550
Nefedov NN, Nikitin AG (2007) The Cauchy problem for a singularly perturbed integro-differential Fredholm equation. Comput Math Math Phys 47(4):629–637
Omel’chenko OE, Nefedov NN (2002) Boundary-layer solutions to quasilinear integro-differential equations of the second order. Comput Math Math Phys 42(4):470–482
O’Riordan E, Pickett ML, Shishkin GI (2003) Singularly perturbed problems modeling reaction–convection–diffusion processes. Comput Methods Appl Math 3(3):424–442
Ramos JI (2008) Exponential techniques and implicit Runge Kutta method for singularly perturbed Volterra integro differential equations. Neural Parallel Sci Comput 16:387–404
Roos HG, Stynes M, Tobiska L (2008) Robust numerical methods singularly perturbed differential equations. Springer, Berlin
Salama AA, Bakr SA (2007) Difference schemes of exponential type for singularly perturbed Volterra integro-differential problems. Appl Math Model 31:866–879
Smith DR (1985) Singular perturbation theory. Cambridge University Press, Cambridge
Tao X, Zhang Y (2019) The coupled method for singularly perturbed Volterra integro-differential equations. Adv Differ Equ 2019:217
Acknowledgements
The authors are grateful in advance to the referees and the editors for their valuable comments and suggestions which helped improve the quality of manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Hui Liang.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Cimen, E., Cakir, M. A uniform numerical method for solving singularly perturbed Fredholm integro-differential problem. Comp. Appl. Math. 40, 42 (2021). https://doi.org/10.1007/s40314-021-01412-x
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40314-021-01412-x
Keywords
- Fredholm integro-differential equation
- Singular perturbation
- Finite difference method
- Uniform convergence