
Abstract
We examine the numerical solution of a second-order linear Fredholm integro-differential equation (FIDE) by a finite difference method. The discretization of the problem is obtained by a finite difference method on a uniform mesh. We construct the method using the integral identity method with basis functions and dealing with the integral terms by interpolating quadrature rules with remainder terms. We further employ the factorization method to establish the algorithm. We demonstrate the error estimates and the convergence of the method. The numerical results are enclosed to verify the order of accuracy.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 INTRODUCTION
Integro-differential equations (IDEs) are one of the essential tools having applications in many science fields, such as physics, engineering, biology, chemistry [9, 11]. IDEs are classified with respect to the range of their integral terms. Namely, Fredholm integro-differential equations (FIDEs) have a finite range in the integral term while Volterra integro-differential equations (VIDEs) have an integral term with a bound in terms of a variable.
In this paper, our main focus is to construct a new accurate numerical scheme to obtain the numerical solution of the following boundary value problem with a type of second order Fredholm integro-differential equation
where \(a(t) \geqslant \alpha > 0\), \(f(t)\), \(K(t,s)\) are sufficiently smooth functions in \(t \in \bar {I}\) and in \((t,s) \in \bar {I} \times \bar {I}\).
Various analytical and numerical methods have been developed to obtain exact and approximate solutions of FIDEs. In addition the classical analytical methods such as the direct computation method and the series solution method for FIDEs, one can find many other novel well-developed numerical methods for FIDEs in the literature. For instance, the variational iteration method [11], the Adomian decomposition method [12] and B-spline collocation method [13], Galerkin method [5], Taylor polynomial method [1], the generalized minimal residual method [3], the method of moments based on B-spline wavelet method [8] are some of the recently studied methods for the approximate solutions of FIDEs. It is also known that fitted difference schemes are efficient to maintain accurate numerical results for IDEs. In [7], the author constructed a uniform convergent difference scheme on a graded mesh to achieve the numerical solution of a non-linear VIDE with a boundary layer. A non-linear first order singularly perturbed VIDE with a delay is handled by a finite difference scheme in [12]. In [4], it is also shown that finite difference schemes are reliable tools to treat non-linear VIDEs. Recently, a finite difference scheme is constructed to solve a boundary value problem of a second order singularly perturbed FIDE in [6].
To the best of our knowledge, a difference scheme we presented in this paper has not been performed on FIDEs in the literature yet. In this paper, we essentially establish a convergent finite difference method for the given problem in (1.1)–(1.2) on a uniform mesh. The remaining sections of this work is presented in the following organization. In Section 2, a priori estimations of the continuous problem (1.1)–(1.2) are provided. In Section 3, a finite difference scheme is derived using the integral identity method with basis functions and dealing with the integral terms by interpolating quadrature formulas including residues. In Section 4, after we calculate the error estimates we conclude that the proposed scheme is convergent. The scheme is implemented and tested on a couple of numerical examples in Section 5.
Throughout this paper, for any continuous function \(g(t)\) defined on \([0,T]\) we will consider the norms \({{\left\| g \right\|}_{\infty }} = \mathop {\max }\limits_{t \in [0,T]} \left| {g(t)} \right|\), \({{\left\| g \right\|}_{1}} = \int_0^T {\left| {g(t)} \right|dt} \) and we take \(\bar {K} = \mathop {\max }\limits_{t \in \bar {I}} \int_0^T \left| {K(t,s)} \right|ds\).
2 A PRIORI ESTIMATES
In this section, we present the estimates on the exact solution to the problem (1.1)–(1.2) which describe the asymptotic behavior of the solution and will be considered in the background calculations of the derivation of the numerical scheme.
Lemma 2.1. Let \(a,f \in C(\bar {I})\), \(K \in {{C}^{1}}(\bar {I} \times \bar {I})\) and \(a(t) \geqslant \alpha > 0\). Then, the solution \(u\) to the problem (1.1)–(1.2) holds the estimates
and where \({{C}_{0}} = \frac{{\left| A \right| + \left| B \right| + {{\alpha }^{{ - 1}}}{{{\left\| f \right\|}}_{1}}}}{{1 - {{\alpha }^{{ - 1}}}\bar {K}T}}\) and
where \({{C}_{1}} = C{{e}^{{ - \alpha t}}} + {{\alpha }^{{ - 1}}}\left[ {{{{\left\| f \right\|}}_{\infty }} + \left| \lambda \right|{{C}_{0}}\bar {K}} \right](1 - {{e}^{{\alpha t}}})\).
Proof. We begin the proof by establishing the estimate (2.1). We first rewrite (1.1)–(1.2) as the following
where \(F(t) = - f(t) + \lambda \int_0^T K(t,s)u(s)ds\). Solving (2.3)–(2.4) we obtain
Integrating (2.5) over \((0,t)\) provides
Since \(u(T) = B\) and from (2.6),
Inserting (2.7) into (2.6) we obtain
Here, using the Green’s function
we rewrite (2.8) as the following
As an alternative to this formulation of Green’s function, a Green’s function formula for the operator
is given by
where \(\omega (\xi ) = \frac{{\phi (\xi )}}{{Q(T)}}\), \(Q(t) = \int_0^t \,\phi (s)ds\) and \(\phi (s) = {{e}^{{ - \int_0^s {a(\nu )d\nu } }}}\) and \({{\varphi }_{1}}(t)\) and \({{\varphi }_{2}}(t)\) are respectively the solutions to
Formula (2.11) implies that \(G(t,\xi ) \geqslant 0\) and in accordance with (2.9) we have
From (2.12), we conclude that \(G(t,\xi ) \leqslant {{\alpha }^{{ - 1}}}\) and utilizing this in (2.10) we find
Here, we obtain the following bound for \(F(t)\)
and inserting this bound into (2.13) we have
which provides the desired result in (2.1). To prove (2.2), it suffices to establish a bound for \(u{\kern 1pt} '{\kern 1pt} (0)\) given in (2.7) and insert that bound in the formula of \(u{\kern 1pt} '{\kern 1pt} (t)\) provided in (2.5). Since
and
and from (2.7) it follows that
Hence, we have
which yields the result in (2.2).
3 DERIVATION OF THE DIFFERENCE SCHEME
In this section, we develop a finite difference scheme for the problem (1.1)–(1.2). Before we proceed to the derivation process of the finite difference scheme we provide the necessary notation we use throughout the paper. Let \({{\omega }_{N}}\) be a uniform mesh on \((0,T)\) defined as
and \({{\bar {\omega }}_{N}} = {{\omega }_{N}} \cup \{ {{t}_{0}} = 0,\;{{t}_{N}} = T\} \). For any mesh function \(v(x)\) defined on \({{\bar {\omega }}_{N}}\), let
and
In order to discretize the problem (1.1)–(1.2), we use the following integral identity
with the basis functions
We note that the functions \(\varphi _{i}^{{(1)}}\) and \(\varphi _{i}^{{(2)}}\) are respectively the solutions to the problems
and it is obvious that
To achieve the finite difference scheme from the integral identity given in (3.1), we proceed by dealing with the first two terms on the left hand side of the equality. Rearranging these two terms and applying the appropriate interpolating quadrature rules provided in [2] we obtain
where
where
and
Since
we have the relation
where
Hence, inserting (3.6) in (3.8) provides
Furthermore, for the integral term in (3.1) we first utilize the appropriate interpolating quadrature rules provided in [2] and then apply the right side triangle rule which yield
where
and
Separately, by rearranging the right hand side of (3.1), we attain
where
Inserting the equations (3.8), (3.9) and (3.12) in (3.1) provides the difference relation
where
Once we disregard the error term \({{R}_{i}}\) in (3.14), this leads to the difference scheme for (1.1)–(1.2)
where \({{\theta }_{i}}\) is defined in (3.7).
4 CONVERGENCE ANALYSIS OF THE METHOD
We provide the necessary error estimates and convergence results of the proposed scheme given in (3.16)–(3.17). The error function of the scheme, \({{z}_{i}} = {{y}_{i}} - {{u}_{i}}\), \(0 \leqslant i \leqslant N\), is the solution of
Lemma 4.1. Suppose that \(a,f \in {{C}^{1}}(\bar {I})\), \(K \in {{C}^{1}}(\bar {I} \times \bar {I})\) and \(a(t) \geqslant \alpha > 0\). Then, the error \({{R}_{i}}\) holds the following estimate
Proof. To establish the estimate (4.3), we handle each \(R_{i}^{{(k)}}\), for \(k = 1,2,3,4\) respectively. Applying the Mean Value Theorem to function \(a(t)\) in (3.5) we obtain
It is easy to see that \(0 < {{\varphi }_{i}}(t) \leqslant 1\) by its definition given in (3.2) and taking this and (2.2) into account in (4.4) it follows that
We have an upper bound for \(R_{i}^{{(2)}}\) given in (3.10) as the following
Then, from (3.3) we have
and since \(\left| u \right| \leqslant {{C}_{0}}\) and \(\left| {\frac{\partial }{{\partial \xi }}K(\xi ,s)} \right| \leqslant C\) it follows that
For the third remainder term \(R_{i}^{{(3)}}\) defined in (3.11), we first get the following bound
Here, utilizing the bounds \(\left| u \right| \leqslant {{C}_{0}}\), \(\left| {\frac{d}{{d\xi }}K(\xi ,s)} \right| \leqslant C\) and (2.2) we get
For the last remainder term \(R_{i}^{{(4)}}\) defined in (3.13), we apply the Mean Value Theorem to function \(f(t)\) and get
which follows
As a result, considering (4.5)–(4.8) in (3.15) we get the desired result given in (4.3).
Lemma 4.2. Suppose that the error function \({{z}_{i}}\) solves the problem in (4.1)–(4.2). Then, the error function \({{z}_{i}}\) holds the following estimate
Proof. In [10], it is provided that the discrete Green’s function \(G({{t}_{i}},{{\eta }_{k}})\) for the difference operator
is the solution to the problem
for fixed \(k = 1,2, \ldots ,N - 1\) where \({{\delta }_{{ik}}}\) is the Kronecker delta. Rewriting the problem (4.1)–(4.2) and by the Green’s function, the solution to the problem (4.1)–(4.2) is obtained as
It is also known that the Green’s function \(G({{t}_{i}},{{\eta }_{k}})\) is bounded, namely, \(0 \leqslant G({{t}_{i}},{{\eta }_{k}}) \leqslant c{{\alpha }^{{ - 1}}}\). Taking this into account with (4.10) we have
where \(\tilde {K} = \mathop {\max }\limits_{0 \leqslant i \leqslant N} h\sum\nolimits_{j = 1}^N {\left| {{{K}_{{ij}}}} \right|} \) and this leads to the desired result given in (4.9).
Theorem 4.3. Suppose that \(a,f \in {{C}^{1}}(\bar {I})\), \(K \in {{C}^{1}}(\bar {I} \times \bar {I})\), \(u\) is the solution of (1.1)–(1.2) and \(y\) is the solution of (3.16)–(3.17). Then, y satisfies the following estimate
Proof. This statement follows from Lemma 4.1 and Lemma 4.2.
5 ALGORITHM AND NUMERICAL RESULTS
The numerical results on a couple of problems are demonstrated to support the analysis we made in the previous sections. Since the scheme given in (3.16)–(3.17) is a boundary value problem with a difference equation consisting of three points, we employ the factorization method as introduced in (3.16) and iteration simultaneously. For this purpose, we rearrange the difference scheme in (3.16) in the following form
where
and
Then, the solution to (5.1)–(5.2) is determined by the algorithm
where
Example 1. We study the following boundary value problem
with an exact solution
We calculate the error by the formula
where \({{y}^{N}}\) is the numerical solution for various \(N\) values. The order of convergence is calculated by
For various values of N, the maximum errors and the convergence rates of the approximate solution are enclosed in Table 1.
Example 2. The second test problem is
and the exact solution to this problem is unknown. Hence, the approximate solution \({{y}^{N}}\) is computed and then, the double mesh principle is involved in the computation to estimate the errors and to calculate the convergence. The double mesh principle is taking the error as the difference between the approximate solution on mesh size \(N\) and the approximate solution calculated on double mesh 2N, namely
where \({{y}^{N}}\) is the numerical solution on mesh \(N\) and \({{y}^{{2N}}}\) is the numerical solution on mesh 2N. Further, the formula of convergence rate given in (5.3) is used for the order of convergence.
The error estimations and the convergence study of the approximate solution for various values of \(N\) are provided in Table 2.
6 CONCLUSIONS
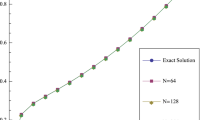
In this study, we mainly derived a finite difference scheme to examine a boundary value problem for a linear second-order Fredholm integro-differential equation. After we studied the asymptotic behavior of the exact solution of the problem, we constructed the difference scheme and established the error estimates and the rate of convergence of the scheme. Further, we provided the numerical results in Tables 1, 2 and Fig. 1 which also match the analytical results on the error estimates and convergence order. Hence, it is analytically and practically shown that the difference scheme is a first order convergent numerical method.

The graphs of the exact solution and the computed solution for \(N = 256\).
REFERENCES
A. Akyüz-Daşcioğlu and M. Sezer, “A Taylor polynomial approach for solving the most general linear Fredholm integro-differential-difference equations,” Math. Methods Appl. Sci. 35 (7), 839–844 (2012).
G. M. Amiraliyev and Ya. D. Mamedov, “Difference schemes on the uniform mesh for singular perturbed pseudo-parabolic equations,” Turk. J. Math. 19, 207–222 (1995).
E. Aruchunan and J. Sulaiman, “Numerical solution of second-order linear Fredholm integro-differential equation using generalized minimal residual method,” Am. J. Appl. Sci. 7 (6), 780–783 (2010).
M. Cakir, B. Gunes, and H. Duru, “A novel computational method for solving nonlinear Volterra integro-differential equation,” Kuwait J. Sci. 48 (1), 1–9 (2021).
J. Chen, Y. Huang, H. Rong, T. Wu, and T. Zeng, “A multiscale Galerkin method for second-order boundary value problems of Fredholm integro-differential equation,” J. Comput. Appl. Math. 290, 633–640 (2015).
E. Cimen and M. Cakir, “A uniform numerical method for solving singularly perturbed Fredholm integro-differential problem,” Comput. Appl. Math. 40, 42 (2021).
S. Şevgin, “Numerical solution of a singularly perturbed Volterra integro-differential equation,” Adv. Differ. Equations 2014, 171 (2014).
K. Maleknejad and M. N. Sahlan, “B-spline collocation method for linear and nonlinear Fredholm and Volterra integro-differential equations,” Int. J. Comput. Math. 87 (7), 1602–1616 (2010).
M. Rahman, Integral Equations and Their Applications (WIT, Southampton, UK, 2007).
A. A. Samarskii, The Theory of Difference Schemes (Marcel Dekker, New York, 2001).
A. M. Wazwaz, Linear and Nonlinear Integral Equations (Springer, Berlin, 2011).
Ö. Yapman, G. M. Amiraliyev, and I. G. Amiraliyeva, “Convergence analysis of fitted numerical method for a singularly perturbed nonlinear Volterra integro-differential equation with delay,” J. Comput. Appl. Math. 355, 301–309 (2019).
Z. Mahmoodi, J. Rashidinia, and E. Babolian, “B-spline collocation method for linear and nonlinear Fredholm and Volterra integro-differential equations,” Appl. Anal. 92 (9), 1787–1802 (2013).
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
The authors declare that they have no conflicts of interest.
Rights and permissions
About this article

Cite this article
Cakir, H.G., Cakir, F. & Cakir, M. A Novel Numerical Approach for Fredholm Integro-Differential Equations. Comput. Math. and Math. Phys. 62, 2161–2171 (2022). https://doi.org/10.1134/S0965542522120065
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S0965542522120065