
Abstract
This paper examines the problem of designing a nonlinear state feedback controller (SFC) for Takagi–Sugeno discrete-time parametric uncertain systems via an iterative linear matrix inequalities (LMIs). The objective of this paper is to establish a novel framework of the SFC with conservatism reduction (less restrictive) results by introducing slack variables. These reduced conservative results are demonstrated by a larger feasible areas of stabilization (stabilization domain). Nevertheless, this paper shows that by changing the initial nonquadratic Lyapunov function, a better solution can be reached (less restrictive results). By using simulations, we verify the new condition robustness and a comparison with another approach existing in the literature to demonstrate the effectiveness of this new approach.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In recent years, there has been growing interest in the study of stability and stabilization Takagi–Sugeno (T–S) fuzzy system Ding (2009), Fang et al. (2006), Liu and Zhang (2003), Lee et al. (2001), Takagi and Sugeno (1985), Tanaka and Wang (2001) due to the fact that it provides a general framework to represent a nonlinear plant by using a set of local linear models which are smoothly connected through nonlinear fuzzy membership functions (MFs). One of the most important issues in the study of T–S fuzzy systems is the analysis of the stability with Lyapunov functions Lee et al. (2013). Via various approaches, a great number of stability/stabilization results for T–S fuzzy systems in both the continuous and discrete time contexts have been reported in the literature Cao and Frank (2001), Mozelli et al. (2009), Latrach et al. (2015).
Two classes of Lyapunov functions are used to analyze these systems: quadratic Lyapunov and nonquadratic Lyapunov functions, the second being less conservative than the first class. Many researches were investigated with nonquadratic Lyapunov functions with T–S nonlinear systems Lin et al. (2006), Tanaka et al. (2003), Manai and Benrejeb (2012), Hui et al. (2015).
Conservatism comes from different sources: the type of T–S fuzzy model, the way the membership functions (MFs) are dropped off to obtain LMI expressions Lin et al. (2006), Tanaka et al. (2003), the integration of MFs information Manai and Benrejeb (2012), Koo et al. (2011), Fang et al. (2006), and the choice of Lyapunov function Tanaka and Wang (2001), Lee and Kim (2009), Manai and Benrejeb (2012), Kruszewski et al. (2008).
In this paper, we deal with the problem of the reduction of conservatism for the discrete-time nonlinear systems based on the choice of the Lyapunov function. Generally, if this conservatism problem cannot be solved by one type of Lyapunov function, it can be solved by another. The conclusion is: If we choose the best Lyapunov function for the appropriate nonlinear systems, then the problem of the conservatism can be solved and better solutions are obtained.
Several alternative classes of Lyapunov candidates function have been proposed in the literature for this problem, and some approaches have been based on a single Lyapunov function. These methods were basically reduced to the problem of finding a common Lyapunov function for a set of stability conditions. Since a common Lyapunov function is used for all subsystems, they can be quite conservative in some situations. Therefore, piecewise Lyapunov functions are applied to fuzzy control systems to obtain less conservative results and have received increasing attention as they attempt to relax the conservativeness of stability and stabilization problems Ke et al. (2011), Feng (2004), Zhang and Feng (2008), Qiu et al. (2010), Feng (2006), Johansson et al. (1999), Manaa et al. (2015). Others introduce decisions variables (slack variables) in order to provide additional degrees of freedom to the LMI problem Manai and Benrejeb (2012), Manai and Benrejeb (2012), Fang et al. (2006), Sala and Ariño (2007). Some recent works investigate a delayed nonquadratic Lyapunov function. They proved that a little modification in the Lyapunov function gives a huge feasible area of stabilization Manai and Benrejeb (2012), Kruszewski et al. (2008), Daafouz and Bernussou (2001), Lendek et al. (2015), Guerra et al. (2012), Xie et al. (2014).
In this paper, a new stabilization condition for Takagi–Sugeno discrete-time parametric uncertain system with the use of a non-PDC controller and new Lyapunov function is discussed. This condition was reformulated with the linear matrix inequality (LMI) technique Teixeira et al. (2003), Du and Yang (2010) which can be efficiently solved by using the convex optimization algorithms. The goal of the proposed approach is to reduce the conservatism of a previous result. The reduction of the conservatism in this field can be shown graphically by increasing the sets of solutions of LMIs or the fast convergence of the systems states variables to their stable equilibrium points during the time, in some cases the reduction of the amplitudes of the control signals. The only way to reduce the conservatism in our study is by increasing the sets of solutions as we treat the asymptotic stabilization conditions where is not important for the fast convergence of the state variables.
The outline of this paper is as follows. First, the T–S system description is discussed. In Sect. 2, materials and mathematics tools are presented. In Sects. 3 and 4, the proposed approach is given, and the main result is proposed in LMI formulation. Robustness conditions to design the feedback controller for parametric uncertain T–S fuzzy models are given using strict LMI constraints. In Section V, examples to show the effectiveness of the proposed approach are proposed. Conclusion completes this paper.
2 System Description and Preliminaries
The discrete-time T–S fuzzy model is described by fuzzy IF–THEN rules, whose collection represents the approximation of the nonlinear system. The ith rule of the T–S fuzzy model is of the following form
where \(M_{ij} (i=1,2,\ldots ,r, j=1,2,\ldots ,p)\) is the fuzzy set and r is the number of model rules, \(x\left( k \right) \in \mathfrak {R}^{n}\) is the states vector, \(u\left( k \right) \in \mathfrak {R}^{m}\) is the input vector, \(A_i \in \mathfrak {R}^{n\times n}\) is the states matrix, \(B_i \in \mathfrak {R}^{n\times m}\) is the control, and \(z_1 \left( k \right) ,\ldots ,z_p \left( k \right) \) are known premise variables.
The T–S discrete-time parametric uncertain model for a nonlinear system is described under the following form.
where \(\Delta A_i , \Delta B_i \) are time-varying matrices representing parametric uncertainties in the model. These uncertainties are norm-bounded and structured.
The final outputs of the fuzzy systems are written under the following form.
where
The term \(M_{i1} \left( {z_j \left( k \right) } \right) \) is the membership degree of \(z_j \left( k \right) \) in \(M_{ij} \)
Since
We have
for all k
Assumption 1, lemma 1, 2 and 3 present the techniques and tools used through the development of the next theorems.
Assumption 1 is a processing technique of the uncertainty function to a matrix function. Lemmas 1, 2 represent a simplification technique of the quadratic form for some matrix representation, and lemma 3 represents one of some techniques of relaxation (complexity’s reduction) for the stability and stabilization form.
Assumption 1
The matrices of the uncertainties in the system are represented in the following form:
where \(D , E_{Bi} \) and \(E_{Ai} \) are known constant matrices and \(F\left( k \right) \) is an unknown function satisfying :
where I is the identity matrix.
Lemma 1
Wang and Mendel (1992) Considering X and \(Y, Q = Q^{T}>0\) matrices of appropriate dimensions, the following inequality holds
Lemma 2
(Schur Complément) Boyd et al. (1994) Whether \(P\in \mathfrak {R}^{m\times m}\) definite positive matrix, \({\hbox {X}}\in \mathfrak {R}^{m\times n}\) full-rank matrix in line, and \(Q\in \mathfrak {R}^{n\times n}\)
any matrix both following inequalities are equivalent
-
1.
$$\begin{aligned}&Q\left( s \right) -X^{T}\left( s \right) P^{-1}\left( s \right) X\left( s \right)>0 , P\left( s \right) >0 \end{aligned}$$(11)
-
2.
$$\begin{aligned}&\left[ {{\begin{array}{cc} {Q\left( s \right) }&{} {\left( {*} \right) } \\ {X\left( s \right) }&{} {P\left( s \right) } \\ \end{array} }} \right] >0 \end{aligned}$$(12)
Relaxation: Whatever the choice of the Lyapunov Functions, the analysis of the stability and stabilization problem is to find the best conditions of the inequality (13).
Lemma 3
(Tanaka and Sano 1994) Equation (13) is fulfilled if the following conditions hold:
The use of these lemmas use is very important for the development of the proposed theorems, and it will appear in the next sections.
3 Stabilization with Non-PDC Controller
This section recalls the technique of stabilization analysis for discrete T–S model based on a nonquadratic Lyapunov function in the discrete case, and the variation of the Lyapunov function is considered for one sample variation. If the final equation of this variation is negative, we obtain a sufficient condition of the T–S stabilization with the state feedback controller. This approach is developed by Guerra et al. (2009).
The following Lyapunov function is used by Guerra and Vermeiren (2004).
where \(P_z \) is symmetric and definite positive matrix, and \(G_z \) is full-rank matrix.
The nonlinearities are expressed by the terms \(h_i \left( {z\left( k \right) } \right) \ge 0\) with the convex sum property \(\sum \nolimits _{i=1}^r {h_i \left( {z\left( k \right) } \right) =1} \). In this paper, we consider the pairs \(\left( {A_i,B_i } \right) , i=\left\{ {1,\ldots ,r} \right\} \) are controllable.
The non-PDC is a state feedback controller, which can be written under the following form in Eq. (17):
Using Eqs. (16) and (17), the variation of Lyapunov function leads us to the following inequality
(Guerra et al. 2009) proposes the following theorem
Theorem 1
Guerra et al. (2009) Consider the parametric uncertain system (2) and the controller (17) and \(\gamma _{ij}^k \) defined in (18) such that \(i, j , k\in \left\{ {1,\ldots ,r} \right\} \). If there exists definite positives matrices \(P_i \), scalars \(\tau \), \(\lambda \) and matrices \(F_i ,G_i \) such as conditions (14) and (15) are satisfied, then the closed-loop fuzzy model is globally asymptotically stable.
Another condition of stabilization for continuous Takagi–Sugeno uncertain systems was investigated by Manai and Benrejeb (2012), Manai and Benrejeb (2012) with the use of nonquadratic Lyapunov function based on additional constant and matrix variables (slack variables).
The Lyapunov function used by Manai and Benrejeb (2012), Manai and Benrejeb (2012) is written under the following form:
The authors in Manai and Benrejeb (2012) propose the next theorem for the stabilization of T–S continuous parametric uncertain systems.
Theorem 2
Manai and Benrejeb (2012) The T–S continuous uncertain parametric system is stable in closed loop if there exists positive definite symmetric matrices \(P_k , k=1,\ldots ,r ,\) and R, matrices \(F_1,\ldots ,F_r \) such that the following LMIs holds:
with
In the following section, we propose a new Lyapunov function based on the Lyapunov function in Eqs. (16) and (19), by adding to the Lyapunov matrices another matrix multiplied by a scalar. The goal from the proposed Lyapunov function is to reduce the conservatism of the theorem 1 by improving the sets of solutions domain.
4 Proposed Approach
Under the condition expressed in theorem 1 and 2, and the Lyapunov function represented by Eqs. (16) and (19), we propose a new nonquadratic Lyapunov function under the following form in Eq. (28). It is considered as an extension of the two last functions in Eqs. (16) and (19).
The variation of the Lyapunov function \(\Delta \left( {V(x(k))} \right) \) is negative if the following inequality is negative:
By multiplying in the left by \(G_z^T \) and the right by \(G_z \), Eq. (29) can be written in the next form
using complement Schur, Eq. (30) becomes
A superior bound was obtained when we use this lemma 1 (Wang et al 1992)
Considering this inequality, Eq. (31) will be in the next form.
With
After the use of complement, Schur equation (34) becomes:
The final equation of stabilization of T–S parametric uncertain systems with the use of the new form of Lyapunov function becomes
where \(0<\mu <1\)
Therefore, the new condition of stabilization of discrete-time Takagi–Sugeno parametric uncertain system is introduced by the next theorem.
Theorem 3
Consider the parametric uncertain system (2) and the control law (17) and \(\gamma _{ij}^k \) defined in (36) such that \(i, j , k\in \left\{ {1,\ldots ,r} \right\} \). If there exists symmetric definite positives matrices \(P_i \), scalars \(\tau , \lambda , 0 \le \mu \le 1\) and matrices \(R, F_i , G_i \) such as conditions (14) et (15) are satisfied, then the closed-loop fuzzy model is globally asymptotically stable.
A new Lyapunov function is proposed in this paper, and it represents an extension from two others existing in the literature. In the next section, we present their robustness by showing their influence on the stabilization region.
5 Simulation and Validation of Results
Consider the T–S discrete-time uncertain system with unstable open loop model (System 1). This system is modelled in two sub-systems \(r = 2\).

Non-PDC control signal
For the simulation, we choose the membership functions under the following form.
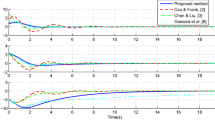
By applying the theorem 1, with (\(\hbox {a} = 1, \hbox {b} = 1\)), the results of LMIs give the next definite positive matrices \(\hbox {P}_1, \hbox {P}_{2}\) and matrices \(G_{1} , G_{2} , F_{1} , F_{2} \)
Figures 1, 2, 3 and 4 illustrate the convergence to the equilibrium point zero of the states variables of subsystems 1 and 2, the control signal and the final outputs \(x\left( {k+1} \right) \) by using the previous matrices. The initial conditions for the simulation are \(x\left( 0 \right) ^{T}=\left[ {{\begin{array}{cc} {{0.5}}&{} {{-0.5}} \\ \end{array} }} \right] \)

Evolution of states variables of subsystem 1

Evolution of states variables of subsystem 2

Evolution of final outputs

Non-PDC control law
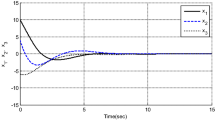
In the next, we apply theorem 3 with the nonlinear control law (17) and stabilization conditions of Theorem 3, we choose \((\mu =0.5)\), and the results of LMIs give the next definite positive matrices \({P}_{1}, {P}_2\) and matrices \(G_{1} , G_{2} , F_{1} , F_{2} , R\):
Figures 5, 6 and 7 illustrate the convergences of control signal and the states variables of sub-systems 1 and 2 to the equilibrium point zero by using the previous matrices. The initial conditions for the simulation are

Evolution of states variables of subsystem 1

Evolution of states variables of subsystem 2
Figures 8 and 9 present the feasible area of stabilization or the sets of solutions of LMI for the theorem 1, 3 with system 1. The mark (o) represents the feasible area of stabilization of theorem 3 and mark (*) represents that of theorem 1.
For theorem 3, the value \(\mu =0.5\) is selected. The subsequent figures demonstrate the robustness of the proposed approach and then the first condition of stabilization in theorem 1. Our approach gives a full feasible area of stabilization between \([a, b] = [-1, 1]\). This area is considered as reduction of conservatism. The more we find a larger area of solutions, the more we reduce the conservatism.

Consider another model with \(r=2\) (System 2)
The next figure gives the feasible area of stabilization that belongs to System 2 by applying theorem 1 and 3 with \([a, b] = [-1, 1]\).

Figures 8 and 9 present a comparison between the proposed condition of stabilization presented in theorem 3 and the condition of stabilization in theorem 1. The proposed condition gives larger sets of solution in terms of linear matrix inequalities; with the addition of new matrix variable multiplied by positive constant in the Lyapunov function, the proposed Lyapunov function and the new condition of stabilization give less conservative results than the ones given by theorem 1. This result demonstrate the interest of approach.
6 Conclusion
This paper develops a new condition of stabilization for Takagi–Sugeno discrete-time parametric uncertain systems in terms of combination of the LMI techniques and new nonquadratic Lyapunov function, which permits a reduction of the conservatism of some previous results existing in the literature and significant increase the solution sets for non-linear models which represent the goal of this work.
The main feature of our contribution is the increase in the solutions sets into one sample variation of the Lyapunov function. In the case of k-samples variation, it has no significant effect to consider. The interest of the proposed approach has been shown through examples and simulations.
Further works include the development of design methods for nonlinear discrete-time nonparametric, and mixed uncertain systems include the generalization of these results to k-sample variation investing another form of nonquadratic Lyapunov functions.
References
Boyd, S., El Ghaoui, L., Feron, E., & Balakrishnan, V. (1994). Linear matrix inequalities in system and control theory. Studies in Applied and Numerical Mathematics. doi:10.1137/1.9781611970777.
Cao, Y. Y., & Frank, P. M. (2001). Stability analysis and synthesis of nonlinear time-delay systems via Takagi-Sugeno fuzzy models. Fuzzy Sets and Systems, 124(2), 213–229.
Daafouz, J., & Bernussou, J. (2001). Parameter dependent Lyapunov functions for discrete time systems with time varying parameter uncertainties. System and Control Letters, 43(5), 355–359.
Ding, B. C. (2009). Quadratic boundedness via dynamic output feedback for constrained nonlinear systems in Takagi-Sugeno’s form. Automatica, 45(5), 2093–2098.
Du, X., & Yang, G. H. (2010). Improved LMI conditions for \({H}\infty \) output feedback stabilization of linear discrete-time systems. International Journal of Control, Automation, and Systems, 8(1), 163–168.
Fang, C. H., Liu, Y. S., Kau, S. W., Hong, L., & Lee, C. H. (2006). A new LMI-based approach to relaxed quadratic stabilization of T–S fuzzy control systems. IEEE Transactions on Fuzzy Systems, 14(3), 386–397.
Fang, C. H., Liu, Y. S., Kau, S. W., Hong, L., & Lee, C. (2006). A new LMI based approach to relaxed quadratic stabilization of T–S fuzzy control systems. IEEE Transactions Fuzzy Systems, 14(3), 386–397.
Feng, G. (2004). Stability analysis of discrete-time fuzzy dynamic systems based on piecewise Lyapunov functions. IEEE Transactions Fuzzy Systems, 12(1), 22–28.
Feng, G. (2006). A survey on analysis and design of model-based fuzzy control systems. IEEE Transactions Fuzzy Systems, 14(5), 676–697.
Guerra, T. M., Kerkeni, H., Lauber, J., & Vermeiren, L. (2012). An efficient Lyapunov function for discrete T–S models: Observer design. IEEE Transactions on Fuzzy Systems, 20(1), 187–196.
Guerra, T. M., Kruszewski, A., & Lauber, J. (2009). Discrete Tagaki–Sugeno models for control: Where are we? Annual reviewers in control, 33(1), 37–47.
Guerra, T. M., & Vermeiren, L. (2004). LMI-based relaxed non quadratic stabilization conditions for nonlinear systems in the Takagi–Sugeno’s form. Automatica, 40(5), 823–829.
Hui, J. J., Zhang, H. X., & Kong, X. Y. (2015). Delay-dependent non-fragile \(H\infty \) control for linear systems with interval time-varying delay. International Journal of Automation and Computing, 12(1), 109–116.
Johansson, M., Rantzer, A., & Arzen, K. (1999). Piecewise quadratic stability of fuzzy systems. IEEE Transactions Fuzzy Systems, 7(6), 713–722.
Ke, Z., Fuyang, J. B. C., & Xinzhe , Y. (2011). Piecewise Fault estimation observer design for discrete-time Takagi–Sugeno fuzzy systems. In Proceedings of the 30th Chinese control conference, July 22–24, Yantai, China.
Koo, G. B., Park, J. B., & Joo, Y. H. (2011). Robust fuzzy controller for large-scale nonlinear systems using decentralized static output-feedback. International Journal of Control, Automation, and Systems, 9(4), 649–658.
Kruszewski, A., Wang, R., & Guerra, T. M. (2008). Nonquadratic stabilization conditions for a class of uncertain nonlinear discrete time TS fuzzy models: a new approach. IEEE Transactions on Automatic Control, 53(2), 606–611.
Latrach, C., Kchaou, M., Rabhi, A., & Hajjaji, A. E. (2015). Decentralized networked control system design using Takagi–Sugeno (TS) fuzzy approach. International Journal of Automation and Computing, 12(2), 125–133.
Lee, H. J., & Kim, D. W. (2009). Robust stabilization of T–S fuzzy systems: Fuzzy static output feedback under parametric uncertainty. International Journal of Control, Automation, and Systems, 7(5), 731–736.
Lee, H. J., Park, J. B., & Chen, G. (2001). Robust fuzzy control of nonlinear systems with parametric uncertainties. IEEE Transaction on Fuzzy Systems, 9(2), 369–379.
Lee, D. H., Tak, M. H., & Joo, Y. H. (2013). A Lyapunov functional approach to robust stability analysis of continuous-time uncertain linear systems in polytopic domains. International Journal of Control, Automation, and Systems, 11(3), 460–469.
Lendek, Z., Guerra, T. M., & Lauber, J. (2015). Controller design for TS models using delayed nonquadratic Lyapunov functions. IEEE Transactions on Cybernetics, 45(3), 453–464.
Lin, C., Wang, Q. G., & Lee, T. H. (2006). Delay-dependent LMI conditions for stability and stabilization of T–S fuzzy systems with bounded timedelay. Fuzzy Sets and Systems, 157(9), 1229–1247.
Liu, X., & Zhang, Q. (2003). New approaches to \(\text{ H }\infty \) controller designs based on fuzzy observers for T-S fuzzy systems via LMI. Automatica, 39(9), 1571–1582.
Manaa, I., Barhoumi, N., & Msahli, F. (2015). Global stability analysis of switched nonlinear observers. International Journal of Automation and Computing, 12(4), 432–439.
Manai, Y., & Benrejeb, M. (2012). New condition of stabilisation for continuous Takagi-sugeno fuzzy system based on fuzzy lyapunov function. International Journal of Control and Automation, 4(3), 51–64.
Manai, Y., & Benrejeb, M. (2012). New condition of stabilization of uncertain continuous Takagi-Sugeno fuzzy system based on fuzzy lyapunov function. International Journal of Intelligent Systems and Applications, 4, 19–25.
Mozelli, L. A., Palhares, R. M., Souza, F. O., & Mendes, E. M. (2009). Reducing conservativeness in recent stability conditions of TS fuzzy systems. Automatica, 45, 1580–1583.
Qiu, J., Feng, G., & Gao, H. (2010). Fuzzy-model-based piecewise \({H}\infty \) static output- feedback controller design for networked nonlinear systems. IEEE Transactions Fuzzy Systems, 18(5), 919–934.
Sala, A., & Ariño, C. (2007). Asymptotically necessary and sufficient conditions for stability and performance in fuzzy control: Applications of Polya’s theorem. Fuzzy Sets and Systems, 158(24), 2671–2686.
Takagi, T., & Sugeno, M. (1985). Fuzzy identification of systems and its application to modeling and control. IEEE Transactions on System, Man and Cybernetics, 15(1), 116–132.
Tanaka, K., Hori, T., & Wang, H. O. (2003). A multiple Lyapunov function approach to stabilization of fuzzy control systems. IEEE Transactions on Fuzzy Systems, 11(4), 582–589.
Tanaka, K., & Sano, M. (1994). A robust stabilization problem of fuzzy control systems and its application to backing up control of a truck-trailer. IEEE Transactions on Fuzzy Systems, 2, 119–134.
Tanaka, K., & Wang, H. O. (2001). Fuzzy control systems design and analysis. New York: Wiley.
Teixeira, M., Assunçao, R., & Avellar, E. (2003). On relaxed LMI-based design for fuzzy regulators and fuzzy observers. IEEE Transactions on Fuzzy Systems, 11(5), 613–623.
Wang, L. X., & Mendel, J. M. (1992). Fuzzy basis functions, universal approximation and irthogonal least- squares. IEEE Transactions on Neural Networks, 3(5), 807–814.
Xie, X. Peng, ShengYang, D., & Lin Zhu, X. (2014). Relaxed observer design of discrete-time T–S fuzzy systems via a novel multi-instant fuzzyo bserver. Signal Processing, 102, 296–303.
Zhang, H., & Feng, G. (2008). Stability analysis and \(\text{ H }\infty \) controller design of discrete-time fuzzy large-scale systems based on piecewise Lyapunov functions. IEEE Transactions Systems, Man, Cybern. B: Cybern., 38(5), 1390–1401.
Acknowledgements
The first author would like to thank the members of “Laboratory of Research in Automatic Control” (LARA–ENIT) for supporting him during the development of this work and for their advice and help.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Bouyahya, A., Manai, Y. & Haggège, J. New Approach of Stabilization Based on New Lyapunov Function for Nonlinear Takagi–Sugeno Discrete-Time Uncertain Systems. J Control Autom Electr Syst 28, 171–179 (2017). https://doi.org/10.1007/s40313-016-0293-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40313-016-0293-8