
Abstract
In the present paper, reliability analysis is performed for soil slope stability on c–ϕ soil slope section using four different soft computing techniques ANN, PSO-ANN, GPR and GA-ANFIS. For performing reliability analysis, the coefficient of variation for cohesion, angle of shear resistance and unit weight is taken as 0.3, 0.2 and 0.03, mean value as 10 kPa, 30° and 20 kN/m3, respectively, was used to generate 100 datasets and factor of safety (FOS) of soil slope was calculated by Morgenstern-price method using the GeoStudio 2016 softwareAfter the generation of the actual dataset for the factor of safety of soil slope stability, the dataset is divided into 70% and 30% of the training and testing, respectively, of the soft computing models (ANN, PSO-ANN, GPR and GA-ANFIS). Soft computing models were used to evaluate factor of safety while in training and testing. All of the models are analysed based on various fitness parameters, Taylor diagram and statistical Anderson Darling test to find the most reliable model for the slope stability analysis of c–ϕ soil slope section under study. From the results, it was found that all models performed well, but GA-ANFIS outperformed on comparison among the models i.e. GA-ANFIS model is having higher accuracy and lowest error for the prediction FOS of the soil slope stability.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The stability of soil slopes is a significant issue nowadays since it affects the stability of many open pits, earth dams, and other structures built with soil [1]. On Earth, soil is a naturally occurring substance that exhibits a high degree of variability in its attributes as a result of the process of its evolution. This because of which, it is quite challenging to determine the attributes of soil with high accuracy. Despite the fact that there are many methods, such as the strength reduction method (SRM) and limit equilibrium method (LEM), that can be used to solve the problem of slope stability, one of the reasons for the failure in most of the cases occurs because these methods use deterministic approach. Testing data variability is also a result of the numerous errors, such as error while taking sample and test, as illustrated by Phoon [2]. Reliability analysis is taken in this study to analyse soil slopes in order to use the probabilistic technique in order to overcome these limitations. The soil factors on which stability of soil slope depends are used to develop multiple models for the reliability study, and the outputs provided by these models are examined for the determination of their applicability.
Many scholars in the past have adopted a probabilistic approach in their work. To demonstrate the uncertainty in the soil parameters of an embankment, researchers have performed probabilistic analysis using field and laboratory data sets [3]. Wang et al. [4] investigated post-slope failure utilising a probabilistic model random smoothed particle hydrodynamics. In past, multi-layer embankment was subjected to a reliability investigation by Liang et al. [5], which demonstrated the integration of soil property variability. Cheng [6] demonstrated how to use the annealing approach to quickly and precisely determine the critical failure surface. On a particular earth dam segment, Babu and Srivastava [7] used response surface methodology (RSM) to conduct a reliability analysis. Using a variety of probabilistic models, different failure modes were found by means of the multi-modal soft computing models [8]. Earthen dam’s structure was analysed for safety using an artificial neural network (ANN) soft computing model in both static problem and dynamic problem, and the model performed well at predicting the slope safety factor [9]. For the reliability investigation of infinite slope, Kumar et al. [10] used a variety of probabilistic methods, including multivariate adaptive regression spline (MARS) and adaptive network-based Fuzzy inference system (ANFIS), findings indicate that the models are working good. Samui et al. [11] built a Gaussian process regression (GPR) model in conjunction with an MPMR model to estimate the suction caisson’s uplift capacity. Gao et al. [12] constructed a soft computing model GPR for the prediction of fragmentation of rock in mines. After evaluating past critical studies, it was found out that variability in the soil characteristic parameters is not generally taken into account by standard methods of soil slope stability analysis. In the current study, our aim is to determining the reliability of soil slope stability integrating artificial neural network (ANN), particle swarm optimisation ANN (PSO-ANN), Gaussian process regression (GPR) and genetic algorithm based adaptive network-based fuzzy inference system (GA-ANFIS) soft computing models using first order reliability method (FORM). Additionally, the reliability of these models’ analyses of soil slope stability is also tested using various assessment parameters.
Theoretical Background of Models
Gaussian Process Regression (GPR)
According to Grbić et al. [13], Gaussian process (GP) is a soft computing model which uses continuous data group for the analysis. This approach can be used to solve issues involving both classification and regression [14]. GPR’s mean and covariance [15] are used to define it. Since the mean function represents the function’s central tendency, it is typically set to zero. The covariance function contains the function’s structure that is required for the solution of the problem that we have identified. In this study, FOS is a function of ϒ, ϕ and c.
GPR follows Eq. 1 for its working.
where, \(\varepsilon \) is Gaussian noise.
x = [ϒ, ϕ, c] and y = [FOS] in the current analysis.
For finding output based on the new input, the following relation is provided:
where \({y}_{N+1}\) is target and \({x}_{N+1}\) is new input.
yN+1 follows the Gaussian distribution and KN+1 related to different parameters using Eq. 3.
In this study, training inputs and test input is given by k(xN+1), train and test input auto-covariance is expressed as K and k1(xN+1). The covariance function used to create the GPR model is the radial basis function.
Genetic Algorithm (GA)
Genetic algorithm (GA) is an part of evolutionary algorithms’ population-based probabilistic algorithms and also one of the metaheuristic algorithms [16]. Similar to other EAs, GA uses selection, crossover, and mutation as its main operators. Evolutionary theory serves as the foundation for the class of computational models known as genetic algorithms [17,18,19]. These algorithms add recombination operators for getting critical values while encoding a suggested answers based on data structure that resembles a chromosome. Chromosomes are selected at random and are used for a genetic algorithm development. The reproduction opportunities are then allocated and these structures appraised so that the chromosomes having best solution will have more chances to reproduce than who will provide a subpar result.
Steps involved in GA process [20]: (a) initialisation, (b) operators in GA, and (c) evaluation.
-
(a)
Initialisation: The initial dataset for the starting candidate is randomly generated. Each of the solution, denoted by chromosome in GA, is associated with set of variable values, which is binary values taken in current study.
-
(b)
(b) Operators in GA:
-
(i)
Selection: Solutions, also known as parents, are sorted by selection operator having max. survival, like Darwin’s selection theory and transferred to next level.
-
(ii)
Crossover: The operator switches two people (parents) to produce new people (child) for the next generation. In this case, the GA model employs the scattering method, in which a random string of binary values is initially created, the bits (gens) with one parent are then chosen from the first, and the other bits are chosen from the other lot.
-
(iii)
Mutation: This crucial tool randomly modifies the information stored into GA’s chromosomes. To prevent the set of rules from converging to neighbourhood optima, it is needed to modify the population’s diversity and boost the search potential of the quest scheme through mutation.
-
(c)
Evaluation: This function is used for finding right fit for every people. The following procedure includes the fitness function with the aim to optimise the problem.
In GA-ANFIS model in the first, the dataset is provided to the ANFIS model and after that the GA works for initialisation, operation through operators, and then, the evaluation of the dataset to predict the most accurate factor of safety for the considered slope section. Figure 1 shows the working of GA-ANFIS soft computing model.

Scheme of a GA-ANFIS
ANFIS
Traditional modelling techniques are incompatible with systems that are not in proper procedure and are indeterminate. Soft computing analysing systems are good for interpreting the system of this nature. Neural technology and fuzzy logic are among the numerous techniques that comprise the ability to adopt various systems. The neural network for these types of system has the ability of learning and self-adaptation. In addition, fuzzy logic’s use of fuzzy if–then rules allows it to account for uncertainties in the actual site conditions. ANFIS (adaptive network-based fuzzy inference system) was designed to incorporate benefits of neural networks and if–then rules of fuzzy systems.[21].
Fuzzy Logic Systems
The definition of the if–then rule is as follows: When M and N are the labels for fuzzy rules and their respective membership functions, then IF M is correct THEN N is also correct [22]. As shown in Fig. 2, fuzzy if–then rules are crucial for making decisions under conditions of uncertainty due to their clear structure.

Inference system of fuzzy logic
Adaptive Networks
It is a part of ANFIS soft computing model which is having nodes and these nodes are linked to one another as shown in Fig. 3. The network learning rule’s [23] control parameters are implemented to ensure that errors are minimised. The nodes of the network are of adaptive nature i.e. output that they provide is reliant on connected factors.

Adaptive network diagram
Particle Swarm Optimisation-based Artificial Neural Network
Particle Swarm Optimisation (PSO)
PSO computes, using a population search technique. Each optimisation issue solution is represented by a particle in this computational technique, which groups particles into swarms. The estimated best level for each and every particle is shown in the results. This is known as the best position for all particle (Pbest), and the overall best position is known as Gbest. The next movement and location can now be determined by combining Pbest and Gbest particles. The particle’s ideal value for function can be discovered by counting iterations.
The N size population is represented by Z = [Z1, Z2, …, ZN]T. Every particle Zm is defined as Zs = [Zs,1, Zs,2, Zs,3, Zs,4, ….., Zs,U]. The starting velocity of Z is V = [V1, V2, ………., Vs] and every velocity is Vs = [Vs,1, Vs,2, Vs,3, Vs,4, …………., Vs,U], where s varies from 1 to N.
In above equation, \({{P}_{best}}_{s,q}^{l}\) denotes best qth of the sth individual and \({{G}_{best}}_{q}^{l}\) denotes qth best of global. w denotes inertia weight parameter and, r1 and r2 as + ve acceleration that is influence on the pbest,s position. The Pbest and Gbest are calculated with updates as follows:
At iteration l
PSO has been explained and used in many research works [24,25,26].
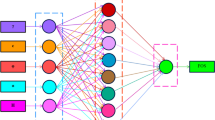
Artificial Neural Network (ANN)
ANN functions as a model with a black box that connects the input and output datasets. It is made up of neurons that are connected to inputs by biases and weights [27,28,29]. The three layers that make up an ANN are the input layer, the hidden layer, and the output layer. The hidden and output layers both contain neurons; however, the input layer does not. Figure 4 depicts the general layout of an ANN with m numbers of inputs and having one output. The neurons’ weight linked to the ith input of the input layer and the jth neuron of the hidden layer is called wij, and the bias connected to the jth of the part is called bj, respectively.

Functional flow diagram of the ANN
To determine the bias and weights of the neurons, an ANN model uses trained input datasets and corresponding output sets. With the aid of MATLAB 2015, the network was trained in this study to obtain accurate weights and bias both with and without the use of PSO. For the PSO-ANN model, first PSO optimises the dataset, and after the optimisation, the dataset was transferred for the ANN model run for the prediction of the factor of safety (FOS) for the considered slope section.
Model Development
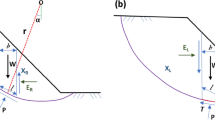
Our reliability investigation of soil slope stability utilising ANN, PSO-ANN, GPR, and GA-ANFIS soft computing models was conducted in this research work employing a 15-m high c-ϕ soil slope having a side slope of 1:1, as provided as an example by Cho [30]. Figure 5 depicts the c-ϕ soil slope in detail. The variation in soil parameters, c, ϕo and γ is taken into account in the probabilistic analysis. Table 1 summarises the statistical properties of soil parameters for the considered slope section [30].

Typical c-ϕ soil slope section
Using the GeoStudio 2016 programme, the Morgenstern-price technique is applied to calculate the factor of safety (FOS) of the c-ϕ type of soil slope. c, ϕ° and γ are the three parameters taken as input variables, and the FOS of the slope is obtained as a response. By the help of GeoStudio 2016 software, the allowable range of c, ϕo and γ is used to obtain 100 datasets of corresponding factor of safety (FOS). ANN, PSO-ANN, GPR and GA-ANFIS models must be standardised in accordance with Eq. 8 in order to use these datasets in MATLAB.
where,
The normalised dataset is fed into the models as input, and the associated predicted output of the models is obtained. The dataset of FOS obtained from the GeoStudio 2016 is the actual dataset and the output which is obtained from four soft computing models is the predicted dataset. In order to compare and determine which models are the best at making predictions, the actual and predicted FOS values that are derived from models are put to the test using a variety of fitness factors.
Results and Discussion
The four soft computing models ANN, PSO-ANN, GPR, and GA-ANFIS were used for a reliability analysis using first-order reliability method (FOSM) of the slope stability for the analysis of c-ϕ soil section under consideration. The dataset of FOS obtained from the GeoStudio 2016 is the actual dataset and the output which is obtained from four soft computing models is the predicted dataset. The data were normalised, divided into training and test sets and used as input and output for each model. Graph of actual versus predicted factor of safety of slope stability for both the stage of training and testing of the ANN, PSO-ANN, GPR and GA-ANFIS models is shown in Figs. 6, 7, 8 and 9, respectively. All values from the training and testing sets of model are relatively close along the line showing actual factor of safety equal to predicted factor of safety, but when the models are compared among the four models, GA-ANFIS model performs well because the results of GA-ANFIS are closest aligned along the actual equals to predicted line.

Model’s performance for training and testing dataset of ANN

Model’s performance for training and testing dataset of PSO-ANN

Model’s performance for training and testing dataset of GPR

Model’s performance for training and testing dataset of GA-ANFIS
All the four soft computing models are analysed using various assessment parameters Nash–Sutcliffe efficiency (NS)[31], root mean square error (RMSE)[32], relative percentage difference (RPD) [33], R2 (coefficient of determination) [1], performance Index (PI) [34], bias factor [35], variance account factor (VAF), RSR, normalised mean bias error (NMBE), MAPE (mean absolute percentage error) [36], Willmott’s index for agreement (WI), mean bias error (MBE) and mean absolute error (MAE), Legate and McCabe’s index (LMI)[37, 38], expanded uncertainty (U95) [39, 40], t-statistic [41], reliability index (β) [42] and global performance indicator (GPI) [43] are used as mentioned in Table 2.
The assessment parameters for the four models ANN, PSO-ANN, GPR and GA-ANFIS are listed in Table 2. As obtained the NS value is close to 1 for each model, which demonstrates the excellent predictive capacity of all models. The RMSE and VAF values demonstrate that, in comparison with other models, the GA-ANFIS model performed well in prediction of FOS since it has the lowest error while predicting the FOS among the four models. GA-ANFIS model’s R2 and Adj. R2 data are almost equal and also the values are closer to 1 when compared to other models, this indicates that the GA-ANFIS has included the variability in soil attributes into account. The GA-ANFIS model has a high level of prediction capability and with least amount of biasness, according to comparisons of the models on the basis of MAPE, PI, RSR, bias factor and NMBE (%) parameters. The values for MAE, LMI, MBE and WI for four models demonstrate how smaller the models diverge from the actual values. According to the RPD value of soft computing models, the GA-ANFIS is the most accurate of the four (Table 2). All of the models, including ANN, PSO-ANN, GPR and GA-ANFIS, did well because the t-stat and U95 values were quite low. Given that the GPI value for the GA-ANFIS model is the lowest of the four models, it is highly accurate in forecasting the FOS of soil slope. The β values for ANN, PSO-ANN, GPR and GA-ANFIS are presented in Table 2. The performance of the models is comparable, as indicated by the reliability index (β) value of all four soft computing models [42, 44].
A Taylor diagram [45] is a statistical graphic used to determine the most accurate soft computing model which is having the following parameters to represent: standard deviation (SD), RMSE and correlation coefficient in the diagram. In Fig. 10, Taylor curves combine SD, RMSE and correlation coefficient to determine the most precise model for the prediction of FOS. According to the plot of the training Taylor diagram (Fig. 10), the GA-ANFIS soft computing model represents the most precise model for the prediction of FOS in comparison with the other three models. In conclusion, it demonstrates that the actual and predicted results of the GA-ANFIS soft computing model are in good agreement.

Taylor diagram a training, b testing plotted for ANN, PSO-ANN, GPR and GA-ANFIS model
Figure 11 presents the ROC (receiver operating characteristic) curve plot for the ANN, PSO-ANN, GPR, and GA-ANFIS soft computing models [46]. Table 3 displays the AUC (area under curve) values for all four soft computing models. Area under curve values from Table 3 show that the GA-ANFIS soft computing technique has the highest value of area under the curve among the four techniques, which indicates that it is having the highest classification accuracy.

ROC curve plot for four soft computing models
A statistical test known as Anderson–Darling (A–D) was developed by Anderson and Darling in 1952 to determine if the model observes the trend of normal distribution or not [47]. For all the models ANN, PSO-ANN, GPR, and GA-ANFIS, the test yields P-values (given in Table 4), which are obtained to be greater than 0.05, demonstrating that all four models behave normally. The GA-ANFIS model observes the trend of normal distribution trend the closest out of the four.
Conclusions
In this article, the ANN, PSO-ANN, GPR and GA-ANFIS soft computing models were taken as a tool to study reliability analysis of soil slope stability. On the basis of numerous performance assessment parameters and Taylor curves, all the four models were thoroughly evaluated and compared, based on which it was found that GA-ANFIS model outperformed having some testing outputs as NS = 0.9918, RMSE = 0.0202, VAF = 99.2145%, Bias Factor = 1.0033, PI = 1.9629, R2 = 0.9918, GPI = 3.1E-04, U95 = 0.4389, t-stat = 1.0825 and β = 3.52. According to the ROC curve results, the GA-ANFIS model had the highest area under the curve (AUC) value, which was then followed by the GPR, ANN and PSO-ANN models. The Anderson–Darling (A–D) statistical test revealed that the GA-ANFIS model had the trend that was most similar to that of a normal distribution. The results conclude that GA-ANFIS model is better model with higher accuracy and lowest error for the prediction FOS of the soil slope stability and also, it can be a part of the portfolio of predicting tools utilised by the practitioners.
Data Availability
Data will be made available on request.
References
Babu GLS, Srivastava A (2007) Reliability analysis of allowable pressure on shallow foundation using response surface method. Comput Geotech 34:187–194. https://doi.org/10.1016/j.compgeo.2006.11.002
Phoon KK (2002) Potential application of reliability-based design to geotechnical engineering. In: In proceedings of 4th colombian geotechnical seminar, Medellin, p 1–22
Christian JT, Ladd CC, Baecher GB (1994) Reliability applied to slope stability analysis. J Geotech Eng 120:2180–2207. https://doi.org/10.1061/(ASCE)0733-9410(1994)120:12(2180)
Wang Y, Qin Z, Liu X, Li L (2019) Probabilistic analysis of post-failure behavior of soil slopes using random smoothed particle hydrodynamics. Eng Geol 261:105266. https://doi.org/10.1016/j.enggeo.2019.105266
Liang R, Nusier O, Malkawi A (1999) A reliability based approach for evaluating the slope stability of embankment dams. Eng Geol 54:271–285
Cheng Y (2003) Location of critical failure surface and some further studies on slope stability analysis. Comput Geotech 30:255–267
Babu GLS, Srivastava A (2010) Reliability analysis of earth dams. J Geotech Geoenviron Eng 136:995–998. https://doi.org/10.1061/(asce)gt.1943-5606.0000313
Reale C, Xue J, Pan Z, Gavin K (2015) Deterministic and probabilistic multi-modal analysis of slope stability. Comput Geotech 66:172–179
Zeroual A, Fourar A, Djeddou M (2009) Predictive modeling of static and seismic stability of small homogeneous earth dams using artificial neural network. Arab J Geosci. https://doi.org/10.1007/s12517-018-4162-6
Kumar R, Samui P, Kumari S (2017) Reliability analysis of infinite slope using metamodels. Geotech Geol Eng. https://doi.org/10.1007/s10706-017-0160-9
Samui P, Kim D, Jagan J, Roy SS (2019) Determination of uplift capacity of suction caisson using gaussian process regression, minimax probability machine regression and extreme learning machine. Iran J Sci Technol-Trans Civ Eng 43:651–657. https://doi.org/10.1007/s40996-018-0155-7
Gao W, Karbasi M, Hasanipanah M (2018) Developing GPR model for forecasting the rock fragmentation in surface mines. Eng Comput 34:339–345. https://doi.org/10.1007/s00366-017-0544-8
Grbić R, Kurtagić D, Slišković D (2013) Stream water temperature prediction based on Gaussian process regression. Expert Syst with Appl 40(7407):7414
Williams CKI (1997) Regression with Gaussian processes. pp 378–382
Zhang C, Wei H, Zhao X et al (2016) A Gaussian process regression based hybrid approach for short-term wind speed prediction. Energy Convers Manag 126:1084–1092. https://doi.org/10.1016/j.enconman.2016.08.086
Chen X, Journal NW (2009) A DNA based genetic algorithm for parameter estimation in the hydrogenation reaction. Chem Eng J 150:527–535
Mustafa R, Samui P, Kumari S (2022) Reliability analysis of gravity retaining wall using hybrid ANFIS. Infrastructures 7:121. https://doi.org/10.3390/INFRASTRUCTURES7090121
Deshwal S, Kumar A, Chhabra D (2020) Exercising hybrid statistical tools GA-RSM, GA-ANN and GA-ANFIS to optimize FDM process parameters for tensile strength improvement. CIRP J Manuf Sci Technol 31:189–199. https://doi.org/10.1016/J.CIRPJ.2020.05.009
Jahed Armaghani D, Harandizadeh H, Momeni E (2022) Load carrying capacity assessment of thin-walled foundations: an ANFIS–PNN model optimized by genetic algorithm. Eng Comput 38:4073–4095. https://doi.org/10.1007/S00366-021-01380-0/METRICS
Ray R (2024) Reliability analysis of clayey soil slope stability Using GMDH and RFC soft computing techniques. Lect Notes Civ Eng 457:121–131. https://doi.org/10.1007/978-981-99-9610-0_11
Jang RJS (1993) ANFIS : adaptive-network-based fuzzy inference system IEEE transactions on systems. Man Cybernetics 23:665–685
Zadeh LA (1965) Fuzzy sets. Inf Control 8:338–353. https://doi.org/10.1016/S0019-9958(65)90241-X
P. Werbos. (1974) Beyond regression: new tools for prediction and analysis in the behavioral sciences bibsonomy. PhD Diss Harvard Univ Cambridge,
Alam MN, Das B, Pant V (2015) A comparative study of metaheuristic optimization approaches for directional overcurrent relays coordination. Electr Power Syst Res 128:39–52. https://doi.org/10.1016/J.EPSR.2015.06.018
Wang G, Ma Z (2017) Hybrid particle swarm optimization for first-order reliability method. Comput Geotech 81:49–58. https://doi.org/10.1016/j.compgeo.2016.07.013
Ray R, Roy LB (2021) Reliability analysis of soil slope stability using Ann, Anfis, Pso-Ann soft computing techniques. NVEO-Nat Volatiles Essent Oils 8:3478–3491
Yadav P, Shah K (2021) Quinolines, a perpetual, multipurpose scaffold in medicinal chemistry. Bioorg Chem 109:1044639
Ghosh S, Singh D, Kumar R, Maharaj S (2021) Phase transition of AdS black holes in 4D EGB gravity coupled to nonlinear electrodynamics. Ann Phys (N Y) 424:168347
Sharma H, Jalal AS (2021) Visual question answering model based on graph neural network and contextual attention. Image Vis Comput 110:104165
Cho SE (2010) Probabilistic assessment of slope stability that considers the spatial variability of soil properties. J Geotech Geoenviron Eng 136:975–984. https://doi.org/10.1061/(ASCE)GT.1943-5606.0000309
Ray R, Samui P, Roy LB (2023) Reliability analysis of a shallow foundation on clayey soil based on settlement criteria. J Curr Sci Technol 13:91–106
Ray R, Choudhary SS, Roy LB et al (2023) Reliability analysis of reinforced soil slope stability using GA-ANFIS, RFC, and GMDH soft computing techniques. Case Stud Constr Mater 18:e01898. https://doi.org/10.1016/J.CSCM.2023.E01898
Ray R, Kumar D, Samui P et al (2020) Application of soft computing techniques for shallow foundation reliability in geotechnical engineering. Geosci Front 12:375–383. https://doi.org/10.1016/j.gsf.2020.05.003
Kung GT, Juang CH, Hsiao EC, Hashash YM (2007) Simplified model for wall deflection and ground-surface settlement caused by braced excavation in clays. J Geotech Geoenviron Eng 133:731–747. https://doi.org/10.1061/(ASCE)1090-0241(2007)133:6(731)
Prasomphan S, Machine SM (2013) Generating prediction map for geostatistical data based on an adaptive neural network using only nearest neighbors. Int J Mach Learn Comput 3:98
Armstrong JS, Collopy F (1992) Error measures for generalizing about forecasting methods: empirical comparisons. Int J Forecast 8:69–80. https://doi.org/10.1016/0169-2070(92)90008-W
Ray R, Choudhary SS, Roy LB (2021) Reliability analysis of layered soil slope stability using ANFIS and MARS soft computing techniques. Int J Performability Eng 17:647. https://doi.org/10.23940/ijpe.21.07.p9.647656
Ray R, Choudhary SS, Roy LB (2021) Reliability analysis of soil slope stability using MARS, GPR and FN soft computing techniques. Model Earth Syst Environ 2021:1–11. https://doi.org/10.1007/S40808-021-01238-W
Gueymard C (2014) A review of validation methodologies and statistical performance indicators for modeled solar radiation data: towards a better bankability of solar projects. Renew Sustain Energy Rev 39:1024–1034
Behar O, Khellaf A, Mohammedi K (2015) Comparison of solar radiation models and their validation under algerian climate–the case of direct irradiance. Energy Convers Manag 98:236–251. https://doi.org/10.1016/j.enconman.2015.03.067
Stone RJ (1993) Improved statistical procedure for the evaluation of solar radiation estimation models. Sol Energy 51:289–291. https://doi.org/10.1016/0038-092X(93)90124-7
USACE (1997) Risk-based analysis in geotechnical engineering for support of planning studies, engineering and design. Dept Army, USACE Washington, DC
Viscarra Rossel RA, McGlynn RN, McBratney AB (2006) Determining the composition of mineral-organic mixes using UV–vis–NIR diffuse reflectance spectroscopy. Geoderma 137:70–82. https://doi.org/10.1016/j.geoderma.2006.07.004
Baecher GB, Christian JT (2003) Reliability and statistics in geotechnical engineering. Wiley, New Jersey
Taylor KE (2001) Summarizing multiple aspects of model performance in a single diagram. J Geophys Res Atmos 106:7183–7192. https://doi.org/10.1029/2000JD900719
Fawcett T (2006) An introduction to ROC analysis. Pattern Recognit Lett 27:861–874. https://doi.org/10.1016/J.PATREC.2005.10.010
Anderson TW, Darling DA (1952) Asymptotic theory of certain and quot; goodness of fit and quot; criteria based on stochastic processes. Ann Math Stat 23:193–212. https://doi.org/10.1214/aoms/1177729437
Funding
No funding was provided for the completion of this study.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ray, R., Roy, L.B. Probabilistic Stability Analysis of Earthen Slope Using ANN, PSO-ANN, GPR and GA-ANFIS Soft Computing Techniques. Indian Geotech J (2024). https://doi.org/10.1007/s40098-024-01039-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40098-024-01039-9