
Abstract
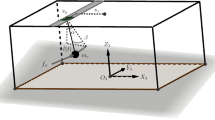
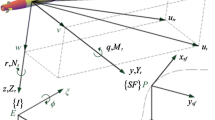
In this paper, a neural network-based robust anti-sway control is proposed for a crane system transporting an underwater object. A dynamic model of the crane system is developed by incorporating hoisting dynamics, hydrodynamic forces, and external disturbances. Considering the various uncertain factors that interfere with accurate payload positioning in water, neural networks are designed to compensate for unknown parameters and unmodeled dynamics in the formulated problem. The neural network-based estimators are embedded in the anti-sway control algorithm, which improves the control performance against uncertainties. A sliding mode control with an exponential reaching law is developed to suppress the sway motions during underwater transportation. The asymptotic stability of the sliding manifold is proved via Lyapunov analysis. The embedded estimator prevents the conservative gain selection of the sliding mode control, thus reducing the chattering phenomena. Simulation results are provided to verify the effectiveness and robustness of the proposed control method.
Article PDF
Similar content being viewed by others

Avoid common mistakes on your manuscript.
References
U. H. Shah and K.-S. Hong, Dynamics and Control of Industrial Cranes, Springer, ISBN 978-987-13-5769-5, 2019.
U. H. Shah and K.-S. Hong, “Input shaping control of a nuclear power plant’s fuel transport system,” Nonlinear Dynamics, vol. 77, no. 4, pp. 1737–1748, 2014.
U. H. Shah, K.-S. Hong, and S. H. Choi, “Open-loop vibration control of an underwater system: Application to refueling machine,” IEEE-ASME Transactions on Mechatronics, vol. 22, no. 4, pp. 1622–1632, 2017.
D. Fujioka and W. Singhose, “Optimized input-shaped model reference control on double-pendulum system,” Journal of Dynamic Systems, Measurement, and Control, vol. 140, no. 10, pp. 101004, 2018.
J. Peng, J. Huang, and W. Singhose, “Payload twisting dynamics and oscillation suppression of tower cranes during slewing motions,” Nonlinear Dynamics, vol. 98, no. 2, pp. 1041–1048, 2019.
H.-H. Lee, “Motion planning for three-dimensional overhead cranes with high-speed load hoisting,” International Journal of Control, vol. 78, no. 12, pp. 875–886, 2005.
T. Yang, N. Sun, H. Chen, and Y. C. Fang, “Motion trajectory-based transportation control for 3-D boom cranes: Analysis, design, and experiments,” IEEE Transactions on Industrial Electronics, vol. 66, no. 5, pp. 3636–3646, 2019.
Z. N. Masoud and A. H. Nayfeh, “Sway reduction on container cranes using delayed feedback controller,” Nonlinear Dynamics, vol. 34, no. 3, pp. 347–358, 2003.
N. Sun, Y. Fang, H. Chen, and B. He, “Adaptive nonlinear crane control with load hoisting/lowering and unknown parameters: Design and experiments,” IEEE/ASME Transactions on Mechatronics, vol. 20, no. 5, pp. 2107–2119, 2015.
N. Sun, Y. Fu, T. Yang, J. Zhang, Y. Fang, and X. Xin, “Nonlinear motion control of complicated dual rotary crane systems without velocity feedback: Design, analysis, and hardware experiments,” IEEE Transactions on Automation Science and Engineering, vol. 17, no. 2, pp. 1017–1029, 2020.
W. Sun, S.-F. Su, J. Xia, and Y. Wu, “Adaptive tracking control of wheeled inverted pendulums with periodic disturbances,” IEEE Transactions on Cybernetics, vol. 50, no. 5, pp. 1867–1876, 2020.
B.-J. Park, P.-T. Pham, and K.-S. Hong, “Model reference robust adaptive control of control element drive mechanism in a nuclear power plant,” International Journal of Control Automation and Systems, vol. 18, no. 7, pp. 1651–1661, 2020.
U. H. Shah and K.-S. Hong, “Active vibration control of a flexible rod moving in water: Application to nuclear refueling machines,” Automatica, vol. 93, pp 231–243, 2018.
K.-S. Hong and P.-T. Pham, “Control of axially moving systems: A review,” International Journal of Control Automation and Systems, vol. 17, no. 10, pp. 2610–2623, 2019.
M. H. Zhang, Y. F. Zhang, and X. G. Cheng, “An enhanced coupling PD with sliding mode control method for under-actuated double-pendulum overhead crane systems,” International Journal of Control Automation and Systems, vol. 17, no. 6, pp. 1579–1588, 2019.
A. M. Singh and Q. P. Ha, “Fast terminal sliding control application for second-order underactuated systems,” International Journal of Control Automation and Systems, vol. 17, no. 8, pp. 1884–1898, 2019.
L. A. Tuan, “Fractional-order fast terminal back-stepping sliding mode control of crawler cranes,” Mechanism and Machine Theory, vol. 137, pp 297–314, 2019.
O. Jedda and A. Douik, “Optimal discrete-time integral sliding mode control for piecewise affine systems,” International Journal of Control Automation and Systems, vol. 17, no. 5, pp. 1221–1232, 2019.
G.-H. Kim, “Continuous integral sliding mode control of an offshore container crane with input saturation,” International Journal of Control Automation and Systems, vol. 18, no. 9, pp. 2326–2336, 2020.
G.-H. Kim and K.-S. Hong, “Adaptive sliding-mode control of an offshore container crane with unknown disturbances,” IEEE/ASME Transactions on Mechatronics, vol. 24, no. 6, pp. 2850–2861, 2019.
Q. H. Ngo, N. P. Nguyen, C. N. Nguyen, T. H. Tran, and V. H. Bui, “Payload pendulation and position control systems for an offshore container crane with adaptive-gain sliding mode control,” Asian Journal of Control, pp. 1–10, 2019. DOI: https://doi.org/10.1002/asjc.2124
L. A. Tuan, H. M. Cuong, P. V. Trieu, L. C. Nho, V. D. Thuan, and L. V. Anh, “Adaptive neural network sliding mode control of shipboard container cranes considering actuator backlash,” Mechanical Systems and Signal Processing, vol. 112, pp. 233–250, 2018.
M.-S. Park, D. Chwa, and M. Eom, “Adaptive sliding-mode antisway control of uncertain overhead cranes with highspeed hoisting motion,” IEEE Transactions on Fuzzy Systems, vol. 22, no. 5, pp. 1262–1271, 2014.
W. Sun, S.-F. Su, J. Xia, and V.-T. Nguyen, “Adaptive fuzzy tracking control of flexible-joint robots with full-state constraints,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 49, no. 11, pp. 2201–2209, 2019.
W. Sun, J.-W. Lin, S.-F. Su, N. Wang, and M. J. Er, “Reduced adaptive fuzzy decoupling control for lower limb exoskeleton,” IEEE Transactions on Cybernetics, 2020. DOI: https://doi.org/10.1109/TCYB.2020.2972582
S.-H. Wen, W. Zheng, S.-D. Jia, Z.-X. Ji, P.-C. Hao, and H.-K. Lam, “Unactuated force control of 5-DOF parallel robot based on fuzzy PI,” International Journal of Control Automation and Systems, vol. 18, no. 6, pp. 1629–1641, 2020.
J. W. Glasheen and T. A. McMahon, “Vertical water entry of disks at low froude numbers,” Physics of Fluids, vol. 8, no. 8, pp. 2078–2083, 1996.
C.-C. Lin, R.-C. Chen, and T.-L. Li, “Experimental determination of the hydrodynamic coefficients of an underwater manipulator,” Journal of Robotic Systems, vol. 16, no. 6, pp. 329–338, 1999.
S. S. Ge, C. C. Hang, T. H. Lee, and T. Zhang, Stable Adaptive Neural Network Control, Kluwer, Norwell, MA, 2001.
J. Park and I. W. Sandberg, “Universal approximation using radial-basis-function networks,” Neural Computation, vol. 3, no. 2, pp. 246–257, 1991.
Author information
Authors and Affiliations
Corresponding author
Additional information
Recommended by Associate Editor Chang-Sei Kim under the direction of Editor-in-Chief Keum-Shik Hong.
This work was supported by the National Research Foundation (NRF) of Korea under the auspices of the Ministry of Science and ICT, Korea (grant no. NRF-2020R1A2B5B03096000). We would like to thank Ho Chi Minh City University of Technology (HCMUT), VNU-HCM, and the Dong Nai Technology University for the support of time and facilities for this research.
Gyoung-Hahn Kim received his B.S. degree in mechanical engineering from Yeungnam University, Gyeongsan, Korea in 2013, and an M.S. degree in mechanical engineering at Pusan National University, Busan, Korea in 2019. He is currently a Researcher, Pusan National University, pursuing his Ph.D. degree. His research interests include sliding mode control, adaptive neural network control, reinforcement deep learning, control theory, and control applications to industrial robotics.
Phuong-Tung Pham received his B.S. and M.S. degrees in mechanical engineering from Ho Chi Minh City University of Technology, in 2016 and 2018, respectively. He is currently a Ph.D. candidate in the School of Mechanical Engineering, Pusan National University, Korea. His research interests include nonlinear control, adaptive control, vibration control, and control of distributed parameter systems.
Quang Hieu Ngo received his B.S. degree in mechanical engineering from Ho Chi Minh City University of Technology, Vietnam, in 2002, an M.S. degree in mechatronics from Asian Institute of Technology, Thailand, in 2007, and a Ph.D. degree in mechanical engineering from Pusan National University, Korea, in 2012. He is currently an Associate Professor in the Department of Mechanical Engineering, Can Tho University. His research interests include port automation, control of axially moving systems, sliding mode control, adaptive control, and input shaping control.
Quoc Chi Nguyen received his B.S. degree in mechanical engineering from Ho Chi Minh City University of Technology (HCMUT), Vietnam, in 2002, an M.S. degree in cybernetics from HCMUT, Vietnam, in 2006, and a Ph.D. degree in mechanical engineering from the Pusan National University, Korea, in 2012. Dr. Nguyen was a Marie Curie FP7 Postdoctoral Fellow at the School of Mechanical Engineering, Tel Aviv University, from 2013 to 2014. He is currently an Associate Professor with the Department of Mechatronics, HCMUT. Dr. Nguyen’s current research interests include nonlinear systems theory, adaptive control, robotics, and distributed parameter systems.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kim, GH., Pham, PT., Ngo, Q.H. et al. Neural Network-based Robust Anti-sway Control of an Industrial Crane Subjected to Hoisting Dynamics and Uncertain Hydrodynamic Forces. Int. J. Control Autom. Syst. 19, 1953–1961 (2021). https://doi.org/10.1007/s12555-020-0333-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12555-020-0333-9