
Abstract
For upgrading the transmission performance of spiral bevel gear and extending the time between overhauls of the helicopter reducer, an innovative multi-objective collaborative optimization strategy of shape and performance is put up for the super-high-contact-ratio spiral bevel gear transmission with the contact path along tooth width based on ease-off. Firstly, according to the preset contact path curve along tooth width and the symmetrical transmission error curve, the pinion optimal surface satisfying the preset functions is obtained based on ease-off. Secondly, based on the basic principles of simulated annealing and gravitational search, the simulated annealing-gravity search cooperative intelligent optimization algorithm is set up for the calculation of the multi-objective collaborative optimization model of the spiral bevel gear transmission, and the modified surface of pinion satisfying the function requirements is obtained based on the collaborative optimization of shape and performance. Finally, combined with the tooth contact analysis method, meshing impact analysis method and dynamic analysis method, the loaded transmission error, meshing impact and dynamic performance of the super-high-contact-ratio spiral bevel gear transmissions are discussed. The simulation result shows the contact path of the collaborative designed spiral bevel gear transmission is along the tooth width, and the contact ratio reaches the maximum. The loaded transmission error, meshing impact, dynamic load factor and root mean square of vibration acceleration of the collaborative design spiral bevel gear transmission are all smaller than the original design and optimized design spiral bevel gear transmissions. The feasibility of the innovative multi-objective collaborative optimization strategy of shape and performance for the spiral bevel gear is verified, and the super-high-contact-ratio design can greatly cut down the contact vibration of the spiral bevel gear transmissions and better the helicopter’s performance.
Highlights
-
Super-high-contact-ratio spiral bevel gear with contact path along tooth width.
-
Multi-objective collaborative optimization strategy of shape and performance.
-
Simulated annealing-gravity search cooperative intelligent optimization algorithm.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The spiral bevel gear (SBG) transmission has been one of the indispensable key parts of helicopter system, while its performance directly affects the time between overhauls of helicopters. Recently, many scholars have conducted in-depth research on the design of the SBG transmissions to improve their meshing performance. Mu proposed a novel ease-off flank modification method of the SBG transmissions to improve their dynamic performance [1]. Zhao analyzed the rolling processes of extrusion forming, gear splitting, continuous rolling and reshaping by finite element method for the SBG transmissions, and he also studied the kinematic relationship between the rolling wheel and the forming gear during rolling deformation [2]. Yang put up a new taper design method for the SBG transmissions by the completing process method to ensure that the tooth thickness and the tooth space width change in proportion to the cone distance [3]. As shown in Fig. 1a, the contact path (CP) curve of the early SBG transmission is nearly perpendicular to the root cone [4], and there are many problems such as low contact ratio and large vibration, which cannot meet the high performance demands of the SBG transmissions under the high-speed and heavy-load conditions. Contact ratio is the important indexes for judging the meshing performances of the SBG transmissions, and high-contact-ratio (HCR) design is the important implications for improving the meshing quality of the SBG transmissions [5, 6]. Huang conducted a brief research status on the HCR gear transmission. And he also established the nonlinear dynamic model for the HCR gear transmission with multiple clearances by the lumped mass method. With the help of bifurcation diagrams, largest Lyapunov exponent charts, time-domain waveforms, and phase diagrams, the influence of excitation frequency, gear backlash, error fluctuation, and loaded radial clearance on the nonlinear dynamic characteristics of the system is investigated in detail [7]. Marimuthu put up a novel method to determine the improvement in the bending strength of the non-standard HCR spur gears based on the balanced fillet stress of the pinion and gear [8]. Balu have considered the bending strength, shearing at contact region, normal stress and some contact parameters like contact pressure, penetration and contact stiffness to compare HCR gears and LCR gears. He found that HCR gears deforming less when compared to the later type for the same load transmitted [9]. Xu investigated a novel type of internal gearing transmission with HCR, and he also put forward the design principle and method for the tooth profile [10]. Wang carried out the dynamic simulation of the HCR gear transmission based on ADAMS, and produced the HCR speed reducer. He also found that the transmission ratio of the HCR gear drive has smaller amplitude value and hence better transmission stability than the involute gear drive [11]. Li studied the vibration intensity stability and movement orbit stability of HCR gear rotor-rolling bearing transmission system, and he found that the contribution of HCR gear pair can enhance the stability of the gear rotor-rolling bearing system [12].The most common measure for improving the contact ratio is to raise the crossing angle between the root cone and the CP curve on the tooth surface of pinion. Deng improve the contact ratio for the SBG transmissions by raising the crossing angle between the root cone and the CP curve on the tooth surface of pinion (shown in Fig. 1b), and he also found that raising the contact ratio is the most effective way to cut down their vibration [13,14,15,16]. Mu put up a novel design method for the SBG transmission with high-contact-ratio based on tooth length curvature correction method, which reduced gear transmission vibration, and improved the gear transmission performance [17,18,19,20,21,22]. Yu proposed a method for the analysis of high-contact-ratio gear transmission [23]. Gui put up a high-contact-ratio gear transmission with the novel internal compound cycloid [24]. Jia put up a new way for reducing the loaded transmission error (LTE) of the cylindrical gear with HCR [25]. Wang set up a novel internal gear with high-contact-ratio, in which the CP is a circular arc [26]. Pleguezuelos study the influence of the quasi-static transmission error (TE) of profile modifications on spur gear with HCR [27]. To fulfill the requirement of the transmission stability for gear with HCR used in aerospace fields, Wang set up an active design way for spur gears with HCR based on pressure angle [28]. To reduce the LTE, Liu proposed a design method of compensation modification for the multi-pair contact of gear with HCR considering the loaded deformation of the teeth between different meshing areas in the process of gear meshing [29]. For upgrading the SBG transmission performance, Su put up a novel design way of large contact ratio with contact path along tooth width [30].

Contact path
To improve the contact quality of the SBG transmission, the multi-objective collaborative optimization strategy of shape and performance is proposed for the super-high-contact-ratio (SHCR) SBG transmission with the CP along tooth width. According to the preset contact path along tooth width, the pinion optimal surface is obtained based on ease-off. Based on the basic principles of simulated annealing and gravitational search, the multi-objective collaborative optimization model is set up, and the pinion modified surface satisfying the function requirement is obtained based on the collaborative optimization of shape and performance. To verify the effectiveness of the multi-objective collaborative optimization strategy of shape and performance, the loaded transmission error (LTE), meshing impact (MI), dynamic load factor (DLF) and root mean square of vibration acceleration (RMA) of the three kinds of SBG transmissions are analyzed. This research offers a valid way for improving the dynamic properties of the SBG transmissions.
2 Design of Optimal Surface
The basic idea for the design of the optimal surface is as followings: Firstly, the preset transmission error curve and the contact pattern on pinion surface are designed. Secondly, pinion auxiliary surface is built based on the preset transmission error curve. Thirdly, the correction value of pinion auxiliary surface along the instantaneous meshing line is calculated based on the modification curve along the instantaneous meshing line of pinion surface, and it is superimposed on pinion auxiliary surface, then pinion optimal surface satisfy the functional requirements is obtained.
2.1 Preset Transmission Error and Contact Pattern
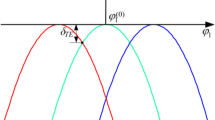
The geometric transmission error curve meeting the functional requirements (shown in Fig. 2) is designed as followings:
where φ(0) 1 and φ1 are the original and actual angle of pinion, m'21 represents the first derivative of contact ratio function.

The TE curve
As shown in Fig. 3, the CP curve runs through the whole surface, and raising the angle between the CP curve and root cone may can obtain a higher contact ratio. The CP curve is designed Based on the contact ratio as followings:
where xM and yM represent the horizontal coordinate and vertical coordinate of reference point.

The CP curve
2.2 Pinion Optimal Surface
The gear surface can be get as followings:
where n2 and r2 are the normal and position vector of gear surface, f2 is meshing equation, θg and sg denote the parameter of surface, φg denotes gear cradle angle.
As shown in Fig. 4, the gear is used as the cutter for generating the auxiliary surface of pinion, and shown as follows:
where φ1 denotes pinion rotation angle, φ2 denotes gear cutter rotation angle, f12 denotes the meshing equation. Mh2 and M1h denote the coordinate transform matrices from S2 to Sh, from Sh to S1. L1h and Lh2 denote the upper-left 3 × 3 sub-matrix of M1h and Mh2.

The generating coordinate system
To get pinion optimal surface, its auxiliary surface need to be corrected along the meshing line, while points’ position vectors on pinion optimal surface (shown in Fig. 5) are get as follows:
where δy represents the flank correction. p' and n' are point’s position and normal vector on auxiliary surface of pinion.

The optimal surface
3 Analysis of Dynamic Performance
The vibration equation of the SBG transmission (Eq. 6) is set up according to the dynamic model (Fig. 6), in which the DLF and the RMA is calculated by applying the meshing stiffness (MS) excitation and MI excitation to the dynamic model [17]. The MS excitation is obtained based on the TCA and LTCA method. The MI excitation is obtained based on the MI theory of the SBG transmission.
where Fs is impact force. Fn is normal load. Fj is the component of normal load Fn. kij is the supporting stiffness. mi is the mass. cij are the damping. Ti is the torque. (j = x, y, z, and i = 1, 2).

Dynamic model of SBG transmission
4 Collaborative Optimization of Shape and Performance
The position vector of cutter-head is expressed as follows:
where sp and θp are the cutter-head parameters, Rp is cutter radius, and α1 represents profile angle.
Based on the coordinate system between the cutter-head and pinion, the position vector r1 of pinion tooth surface is as follows:
where
Here the pinion processing parameter are mentioned in detail, and φp represents cradle rotation angle,φ1 represents pinion rotation angle, Sr1 represents cutter radial setting, q1 represents initial cradle angle setting, cr1 is the reciprocal of roll ratio, Em1 represents vertical offset, Xb1 represents sliding base feed setting, XG1 represents increment of machine center to back and γ1 represents machine root angle. Cp and Dp are the 2nd-order factor and 3rd-order factor. Pinion is processed by the modify-roll method, then the relationship between φp and φ1 is as follows:
Assuming that ni and pi are the normal and position vector of the discrete point on the pinion surface. The normal deviation between pinion optimal and modified surface is as followings:
where d is pinion processing parameter.
Then, based on the collaborative optimization strategy of shape and performance, the optimal model shown in Eq. 12 is built for the SBG transmission to cut down the flank deviation and RMA.
where χi (i = 1,2) represents the minimum and the maximum optimization variable.
According to the research on the optimization variables, objectives functions and constraints carried out in Eq. 12, the simulated annealing-gravity search intelligent optimization algorithm, which can not only release the convergence advantage of the gravity search algorithm, but also avoid the trap of the local optimal solution based on the simulated annealing algorithm, is proposed according to the basic principles of the simulated annealing method and the gravity search method. The intelligent collaborative optimization design process of shape and performance for the SBG transmissions based on the simulated annealing and gravity search is shown in Fig. 7, and the main optimization design process is as follows:
-
i.
Generating the random initialization population of the gravity search algorithm, while each population represents a solution of the feasible region.
-
ii.
Calculating the fitness value of each individual.
-
iii.
Judging whether it meets the termination condition. If yes, terminate the algorithm and output the current optimal result. Otherwise, continue to step iv.
-
iv.
Calculating the individual's gravitational constant, individual distance, resultant force and acceleration in turn, and updating the individual's speed and position.
-
v.
Generating the initial state of simulated annealing algorithm based on the updated individual speed and position, calculating the initial temperature, and randomly generating the initial solution.
-
vi.
Generating the new individuals according to the current simulated annealing state.
-
vii.
Judging whether the Metropolis sampling stability criterion is met. If yes, conduct annealing and cooling operation, generate a new iteration count and return to step ii, otherwise return to step vi.

Intelligent collaborative optimization design process
5 Numerical Example
The working surface of a SBG transmission is taken as an example for the analysis of the collaborative optimization strategy of shape and performance put up for the SBG transmission, and their parameters are shown in Tables 1–2.
Firstly of all, the SBG transmission is optimized based on the GA method and the local synthesis method to reduce the LTE, and the pinion design parameters are get and showed in Table 2. The pinion optimal surface is set up based on ease-off with the preset TE curve and CP curve meeting functional requirements. According to the multi-objective collaborative optimization strategy of shape and performance for the SBG transmission shown in Eq. 12, the pinion modified surface is obtained by using the collaborative intelligent optimization design method, and the pinion parameters are shown in Table 2. The TCA method is used to analyze the meshing performance of the three kinds of SBG transmissions, and the results are shown in Fig. 8. Through comparative analysis, it is found that the CP curve of the SBG transmission that is obtained based on the collaborative optimization strategy of shape and performance is along the tooth width, and meets the design requirements.

TCA results of three kinds of SBG transmission: a the original design; b the optimized design; c the collaborative design
When the load is 700N/m, the LTCA method is used to calculate the LTE of the three kinds of SBG transmissions, Table 3 and Fig. 9 show the TCA results. Analysis shows that the LTE of the original design SBG transmission is 7.1090″, the LTE of the optimized design SBG transmission is 4.4330″, which is 37.64% lower than the original design, the LTE of the collaborative design SBG transmission is 3.0870″, which was 56.58% lower than the original design and 30.36% lower than the optimized design. The data shows that the collaborative optimization strategy of shape and performance could greatly lower the LTE of the SBG transmissions. Due to LTE is the key excitation in the SBG transmission vibration, the collaborative design strategy of shape and performance is very good for cutting down the vibration excitation and upgrading the dynamic properties of the SBG transmission.

LTCA results of three kinds of SBG transmission
To show the advantages of the collaborative optimization strategy of shape and performance, the LTE of the three kinds of SBG transmissions are analyzed based on the FEA method. To ensure the accuracy of the FEA results, the accuracy of the FEA model for the SBG transmission should be guaranteed. The accuracy of the FEA model is divided into two parts: flank accuracy and assembly accuracy. To ensure the flank accuracy, based on the flank equation, the finite element mesh model of tooth surface is built by rotating and arraying the position coordinates of the discrete points of tooth surface, and the tooth surface obtained by this method can meet the requirements of high accuracy. The solid model of the gear and pinion is constructed with the discrete points, and then the gear and pinion are placed in the same meshing coordinate system based on coordinate transformation to complete the assembly of spiral bevel gear. The FEA model of the SBG transmission shown in Fig. 10 is obtained, and the assembly accuracy meets the requirements. Based on the FEA model, the LTEs of the three kinds of SBG transmissions are obtained, and Table 3 and Fig. 11 are the results. Analysis shows that the LTE of the original design SBG transmission is 7.0120″, the LTE of the optimized design SBG transmission is 4.3280″, which is 38.28% lower than the original design, the LTE of the collaborative design SBG transmission is 3.0260″, which was 56.85% lower than the original design and 30.08% lower than the optimized design. The data shows that although the LTE of the SBG transmission obtained by the LTCA method and the FEA method is slightly different, their variation are basically the same, and the collaborative optimization strategy of shape and performance can further reduce the vibration excitation of the SBG transmission and improve their performance.

the FEA model of the SBG transmissions

FEA results of three kinds of SBG transmission
According to the impact theory, the MI of the three kinds of SBG transmissions under working conditions (load 700N/m, speed 10000r/min) is estimated, and illustrated in Table 3 and Figs. 12–13. Analysis shows that meshing impact velocity (MIV) and meshing impact force (MIF) of the original design SBG transmissions are 0.3694 m/s and 3.0646 kN, the MIV and MIF of the optimized design SBG transmissions are 0.3035 m/s and 2.4511 kN, which are 17.84% and 20.02% less than the original design, the MIV and MIF of the collaborative design SBG transmissions are 0.2551 m/s and 2.0362 kN, which are 15.95% and 16.93% less than the optimized design. Data shows that the collaborative optimization strategy of shape and performance can effectively reduce the MIV and MIF of the SBG transmissions. Due to the MIF is another key vibration excitation of the SBG transmissions, and the collaborative optimization strategy of shape and performance is very good for cutting down the vibration excitation and upgrading the dynamic properties of the SBG transmission.

MIV of three kinds of SBG transmission

MIF of three kinds of SBG transmission
According to the dynamic model of SBG transmission (shown in Fig. 6), the dynamic characteristics of the three kinds of SBG transmissions under given working conditions (load 700 N/m, speed 10,000 r/min) is computed, while Table 3 and Figs. 14–15 are the results. Through the analysis of Fig. 14, it is found that the DLF of the original design, optimized design, and collaborative design of SBG transmissions are 1.1134, 1.0778, and 1.0491, respectively. The data shows that the DLF of the optimized design SBG transmission has been significantly reduced compared with the original design SBG transmission, while the collaborative design could further cut the DLF of the SBG transmission. Through the analysis of Fig. 15, it is found that the RMA of the original design SBG transmission are 306.4738 m/s2, the RMA of the optimized design SBG transmission are 252.4000 m/s2, which is 17.64% lower than the original design SBG transmission, the RMA of the collaborative design SBG transmission are 156.2825 m/s2, while it is further reduced by 38.08% compared with the optimized design SBG transmission. The data shows that the DLF of the optimized design SBG transmission has been significantly reduced compared with the original design SBG transmission, while the collaborative design could further cut the DLF of the SBG transmission. The data shows that the collaborative optimization strategy of shape and performance can effectively reduce the DLF and RMA of the SBG transmissions. The DLF is the factor that comprehensively considers the influence of the internal additional dynamic load generated by the gear transmission vibration. The RMA is the direct embodiment of the gear transmission vibration. The gear transmission vibration increases with the increase of the DLF and RMA. Therefore the collaborative optimization strategy of shape and performance is very good for reducing vibration and improving dynamic properties of the SBG transmissions.

DLF of three kinds of SBG transmission

RMA of three kinds of SBG transmission
To further reveal the advantages of the collaborative strategy of shape and performance for the SBG transmission, the LTE, MI, DLF and RMA of the three kinds of SBG transmissions under the multiple working conditions are analysed, the results are shown in Figs. 16, 17, 18, 19 and 20. As shown in Fig. 16, the LTEs of the three kinds of SBG transmissions are obtained by LTCA, and their LTE changes with the change of the load near the common load, but the LTE of the collaborative design SBG transmission is the lowest, the LTE of the optimized design SBG transmission is the second, and the LTE of the original design SBG transmission is the largest. Therefore, the collaborative optimization strategy of shape and performance can effectively cut down the LTE of the SBG transmissions. As shown in Figs. 17–18, the MIV and MIF of the three kinds of SBG transmissions under the multiple working conditions are obtained by the MI theory of the SBG transmissions, and they increase with the increase of input speed near the common speed, but the MIV and MIF of the collaborative design SBG transmission are the lowest, the MIV and MIF of the optimized design SBG transmission are the second, and the MIV and MIF of the original design SBG transmission are the largest. Therefore, the collaborative optimization strategy of shape and performance can effectively cut down the MI of the SBG transmissions. As shown in Figs. 19–20, the DLF and RMA of the three kinds of SBG transmissions under the multiple working conditions are obtained based on the multi-DOF dynamic model of SBG transmissions, and they all increase with the increase of input speed, but the DLF and RMA of the collaborative design SBG transmission are the lowest, the optimized design SBG transmission are the second, and the original design SBG transmission are the largest. Therefore, the collaborative optimization strategy of shape and performance can improve the dynamic performance of the SBG transmissions.

LTE of three kinds of SBG transmission under the multiple working conditions

MIV of three kinds of SBG transmission under the multiple working conditions

MIF of three kinds of SBG transmission under the multiple working conditions

DLF of three kinds of SBG transmission under the multiple working conditions

RMA of three kinds of SBG transmission under the multiple working conditions
6 Conclusion
For improving the helicopter quality and reducing the SBG transmission vibration, the innovative multi-objective collaborative optimization strategy of shape and performance is proposed for the super-high-contact-ratio SBG with the CP along tooth width. According to the simulation analysis of the three kinds of SBG transmissions, the main findings of the research are as follows:
-
(1)
The CP of the collaborative designed SBG is along the tooth width, and the contact ratio reaches the maximum. Therefore the collaborative optimization strategy of shape and performance can improve the contact ratio of the SBG transmission.
-
(2)
(2) Under working conditions, the LTE and MI of the optimized design SBG transmission are all smaller than the original design SBG transmission, while the collaborative optimization strategy of shape and performance could further cut the LTE and MI of the SBG transmission. Due to LTE and MI are the major internal excitations of the SBG transmission vibration, and the collaborative optimization strategy of shape and performance is very good for reducing the running vibration of the SBG transmissions.
-
(3)
Under working conditions, the DLF and RMA of the optimized design SBG transmission are all smaller than the original design SBG transmission, while the collaborative optimization strategy of shape and performance can further cut the DLF and the RMA of the SBG transmission. The collaborative optimization strategy of shape and performance is very good for improving the dynamic characteristic of the SBG transmission, and improve the time between overhauls of the helicopter transmission system.
References
Mu, Y. M., He, X. M., & Fang, Z. D. (2021). Design and dynamic performance analysis of high-contact-ratio spiral bevel gear based on ease-off technology. International Journal of Precision Engineering and Manufacturing, 22, 1963–1973.
Zhao, J., Wang, J. H., & Li, F. Q. (2021). Study on rolling process analysis and experiment of small cone angle spiral bevel gear. International Journal of Precision Engineering and Manufacturing, 23, 1171–1178.
Yang, Y., Mao, S. M., & Huang, Y. J. (2022). A novel taper design method for face-milled spiral bevel and hypoid gears by completing process method. International Journal of Precision Engineering and Manufacturing, 23, 1–13.
Falah, B., Gosselin, C., & Cloutier, L. (1998). Experimental and numerical investigation of the meshing cycle and contact ratio in spiral bevel gears. Mechanism and Machine Theory, 33, 21–37.
Dogan, O. (2022). Performance evaluation of low- and high-contact ratio spur gears: Dynamic response and bending strength. Journal of Vibration Engineering and Technologies, 10, 1337–1347.
Huang, K., & Xiong, Y. S. (2017). Research on the dynamic response of high-contact-ratio spur gears influenced by surface roughness under EHL condition. Applied Surface Science, 392, 8–18.
Huang, K., Yi, Y., Xiong, Y. S., et al. (2020). Nonlinear dynamics analysis of high contact ratio gears system with multiple clearances. Journal of the Brazilian Society of Mechanical Sciences and Engineering, 42, 98.
Marimuthu, P., & Muthuveerappan, G. (2016). Optimization of fillet stress to enhance the bending strength through non-standard high contact ratio spur gears. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 230, 1139–1148.
Balu, B. (2017). Comparision of high contact ratio and low contact ratio gears. International Journal of Scientific Research in Science and Technology, 3, 657–669.
Xu, A. F., Jia, J. M., Gao, B., et al. (2018). Study on design and experiment for internal gear transmission with high contact ratio. Journal of Mechanical Transmission, 42, 176–180.
Wang, J., Cui, X. B., Luo, S. M., et al. (2016). Analysis and experiment of transmission stability for high contact ratio gear drive. Journal of Xiamen University of Technology, 24, 1–7.
Li, T. J., Jin, G. H., Zhu, R. P., et al. (2017). Vibration parameter stability of high contact ratio gear transimission system. Journal of Aerospace Power, 32, 2456–2466.
Deng, X. Z., & Fang, Z. D. (2002). Design of spiral bevel gears with high contact ratio. China Mechanical Engineering, 13, 791–795.
Deng, X. Z., & Fang, Z. D. (2002). Design and experiment of spiral bevel gears with high contact ratio. Chinese Journal of Mechanical Engineering, 40, 95–99.
Deng, X. Z., & Fang, Z. D. (2002). Strength analysis of spiral bevel gears with high contact ratio. Journal of Aerospace Power, 17, 367–372.
Deng, X. Z., & Fan, M. (2001). Relationship between contact ratio and load of spiral bevel gears. China Mechanical Engineering, 12, 878–880.
Mu, Y. M., He, X. M., & Fang, Z. D. (2021). An innovative ease-off flank modification method based on the dynamic performance for high-speed spiral bevel gear with high-contact-ratio. Mechanism and Machine Theory, 162, 104345.
Mu, Y. M., & He, X. M. (2021). Design and dynamic performance analysis of high-contact-ratio spiral bevel gear based on the higher-order tooth surface modification. Mechanism and Machine Theory, 161, 104312.
Mu, Y. M., He, X. M., & Fang, Z. D. (2021). Wave tooth surface design of high contact ratio spiral bevel gear with minimum loaded transmission error. Journal of Aerospace Power, 36, 2080–2089.
Mu, Y. M., Li, W. L., & Fang, Z. D. (2020). Tooth surface modification method of face-milling spiral bevel gears with high contact ratio based on cutter blade profile correction. International Journal of Advanced Manufacturing Technology, 106, 3229–3237.
Mu, Y. M., & Fang, Z. D. (2018). Design and analysis of high contact ratio spiral bevel gears by modified curvature motion method. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering, 232, 3396–3409.
Mu, Y. M., & Fang, Z. D. (2017). An ease-off flank modification method for high contact ratio spiral bevel gears with modified curvature motion. Journal of Advanced Mechanical Design Systems and Manufacturing, 11, 17–00231.
Ye, S. Y., & Tsai, S. J. (2016). A computerized method for loaded tooth contact analysis of high-contact-ratio spur gears with or without flank modification considering tip corner contact and shaft misalignment. Mechanism and Machine Theory, 97, 190–214.
Gui, X. (2017). Design and analysis of internal compound cycloid gear transmission with high contact ratio. Journal of Mechanical Engineering, 53, 55–64.
Jia, C., & Fang, Z. D. (2019). Design and analysis of double-crowned high-contact-ratio cylindrical gears considering the load sharing of the multi-pair contact. Mechanism and Machine Theory, 131, 92–114.
Wang, Y. Z., Ren, S. Y., & Li, Y. (2019). Design and manufacturing of a novel high contact ratio internal gear with a circular arc contact path. International Journal of Mechanical Sciences, 153–154, 143–153.
Pleguezuelos, M., Sánchez, M. B., & Pedrero, J. I. (2020). Control of transmission error of high contact ratio spur gears with symmetric profile modifications. Mechanism and Machine Theory, 149, 103839.
Wang, J., Luo, S., Deyu, S. U., et al. (2014). Active design and characteristics analysis of high contact ratio gears based on pressure angle. Journal of Central South University (Science and Technology), 45, 3792–3799.
Liu, X., Fang, Z. D., & Shen, Y. B. (2020). Design and analysis of compensation modification for multi-pair contact of high-contact-ratio helical gears. Journal of Xi’an Jiaotong University, 54, 56–64.
Su, J. Z., Wei, G., & Guo, J. S. (2021). Design and analysis of spiral bevel gears with large contact ratio. Journal of Xi’an Jiaotong University, 55, 117–125.
Acknowledgements
We thank the support from the National Key Research and Development Program of China (NO. 2020YFB2010200) and the National Science Foundation of China (NO. 52205056). We also thank all reviewers and editors for their valuable comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Mu, Ym., Hou, Xy., Yang, Sw. et al. An Innovative Collaborative Design of Shape and Performance for Super-High-Contact-Ratio Spiral Bevel Gear. Int. J. Precis. Eng. Manuf. 24, 813–823 (2023). https://doi.org/10.1007/s12541-023-00780-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12541-023-00780-0