
Abstract
In this paper, the real-valued memristive neural networks (MNNs) are extended to quaternion field, a new class of neural networks named quaternion-valued memristive neural networks (QVMNNs) is then established. The problem of master-slave synchronization of this type of networks is investigated in this paper. Two types of controllers are designed: the traditional feedback controller and the event-triggered controller. Corresponding synchronization criteria are then derived based on Lyapunov method. Moreover, it is demonstrated that Zeno behavior can be avoided in case of the event-triggered strategy proposed in this work. Finally, corresponding simulation examples are proposed to demonstrate the correctness of the proposed results derived in this work.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Memristor is regarded as the fourth basic circuit element, which was firstly proposed by Chua (1971). However it failed to receive much attention from research area until 2008, the first practical memristor device was invented by HP company (Strukov et al. 2008). Due to its function to depict the relationship between magnetic flux and electric charge, much potential applications of memrister has appeared recently.
One of these application is the memristive neural networks (MNNs), which is formulated by introducing memristor into the connection weights. Based on the ability to memorize the passed quantity of electronics, MNNs has significant potential to be utilized in synapsis and simulate the human brain. Recently, its dynamical behavior has attracted much research attention and a great many important results have been published (Liu et al. xxx; Chen et al. 2014; Bao and Cao 2014; Wu and Zeng 2014; Zhang and Shen 2014; Chen et al. 2015). However, the investigation of MNNs are mainly restricted to the real- or complex-valued fields, the corresponding research in quaternion field are still very few till now. Thus, it gives us the motivation to investigate the quaternion-valued memristive neural networks (QVMNNs).
In 1843, the British mathematician W. R. Hamilton has invented a special type of Clifford algebra named quaternion (Simmons 1992). Different from real value and complex value, an important feature of quaternion is that the commutativity law of multiplication is not applicable for it. Due to this reason, the development of quaternion has been delayed for a long period of time. In recent years, the research for quaternion-valued systems has become a hot topic due to its widespread applications in various fields, including attitude control (Adler 1995), computer graphics (Took and Mandic 2009), image processing (Zou et al. 2016), and prediction of 3-D wind processing (Xia et al. 2015).
Recently, some researchers have introduced quaternion value into traditional NNs (Yang et al. 2018), thus leading to the formulation of quaternion-valued neural networks (QVNNs). The QVNNs can be seen as the generalization of complex-valued NNs (CVNNs), in which the states, connection weights, and activation functions are all quaternion numbers. Compared with RVNNs and CVNNs, the QVNNs shows significant advantage in dealing with multidimensional data. For instance, in image compression (Isokawa et al. 2003), QVNNs can result in a significant reduction in the size of system compared with RVNNs and CVNNs, thus bring about an improvement in calculation efficiency. Moreover, some optimization and estimation problem can be operated by QVNNs with better performance than RVNNs and CVNNs (Qin et al. 2018; Sahoo et al. 2016). Recently, with the rapid development of QVNNs, some remarkable results have been presented (Liu et al. 2017b; Song and Chen 2018; Chen et al. 2017; Liu et al. 2016; Tu et al. 2017; Chen and Song 2017; Liu et al. 2018; Chen et al. 2018), such as global stability (Liu et al. 2017b), multi-stability (Song and Chen 2018), robust stability (Chen et al. 2017), \(\mu \)-stability (Liu et al. 2016), passivity analysis (Tu et al. 2017), state estimation (Chen and Song 2017). For instance, with the decomposition of the state space, the multi-stability issue for delayed QVNNs were studied in Song and Chen (2018), some dynamical features of the QVNNs are analyzed. In Liu et al. (2018), by applying the approach of decomposition and quaternion-valued LMI, criterion of global \(\mu \)-stability is derived for the QVNNs. Chen and Song (2017) addresses the state estimation for QVNNs with multiple time delay. Via the quaternion-valued LMI method, some criteria are established. Up to now, the investigation of QVNNs are mainly focus on stability issue, the relative results on synchronization is still few.
Synchronization is an important dynamical behavior in network systems, which has been applied in many different areas, such as associative memory, combinational optimization, and pattern recognition (Ding et al. 2017; Ravishankar 2018; Wei et al. 2018; Bao et al. 2016; Nakamura and Tateno 2019; Dharani et al. 2017). In recent decades, literature for the synchronization of NNs have been widely published. The fixed-time synchronization for uncertain complex-valued neural networks with discontinuous activation functions is investigated in Ding et al. (2017). In Bao et al. (2016), exponential synchronization criteria for coupled stochastic MNNs with probabilistic delay coupling is proposed.
For the purpose to reduce the energy consumption and computation burden in communication networks, a novel sampled control scheme named event-triggered control is proposed. Other than conventional control method, the event-triggered controller only updated at the instants that the measured error exceeds some prescribed threshold. Thus, this control strategy can effectively reduce the control execution times and save the communication resource. Recently, much results on event-triggered control of networks systems have been published (Liu et al. 2017a; Wang et al. 2018; Guo et al. 2018; Li et al. 2016). In Liu et al. (2017a), the state estimation for delayed stochastic MNNs with missing measure is investigated by applying event-triggered method. Finite-time state estimation for recurrent delayed neural networks is discussed in Wang et al. (2018) via component-based event-triggered protocol. In Guo et al. (2018), the synchronization problem of real-valued MNNs has been discussed via a novel event-triggered strategy for the first time. However, the corresponding results for event-triggered synchronization of MNNs has not been extended to quaternion field yet, which gives motivation to this work.
An unavoidable phenomenon in various engineering systems is time delay, which is generated by infinite switching ratio of amplifiers or data processing. Unfortunately, it may lead to instability, oscillation, and other poor performance to the system (Ding et al. 2017; Ravishankar 2018; Wei et al. 2018; Bao et al. 2016; Cao 2019; Cao et al. 2019; Huang et al. 2014, 2019; Huang and Zhang 2019; Huang and Liu 2019; Nakamura and Tateno 2019). Thus, it is necessary to take time delays into the study of dynamical behavior of QVMNNs.
Based on the above discussion, the main purpose of this work is to investigate the synchronization problem of QVMNNs with or without event-triggered strategy. The main contributions of this thesis are presented as below.
-
(1)
In this paper, the model of QVMNNs is formulated, which combines the features of both MNNs and QVNNs. Thus, our study is the generalization and extension for existing research on NNs, more challenging dynamical characteristics of network systems are dealt with in our work.
-
(2)
It is the first time that synchronization problem for QVMNNs are investigated by event-triggered control. Two criteria for the master-slave synchronization of QVMNNs are derived, which are convenient to verify.
-
(3)
The theoretical results in this work may provide new ideas for other quaternion-valued networks in the future.
The structure of this work is presented as below. In part 2, the model is established and some basic preliminaries are given. Main results are achieved in Part 3. In Sect. 5, a numerical example is provided to verity the effectiveness of our theorem. Lastly, conclusion is obtained in Part 5.
Notations. In this work, let R, C and Q stand for the real field, complex field and quaternion field, respectively. \(R^{n}, C^{n}\) and \(Q^{n}\) represent the space of n dimensional vectors, \(R_{n\times n}, C_{n\times n}\) and \(Q_{n\times n}\) denotes the space of \(n\times n\) dimensional matrices. \(C^{(1)}([-\tau , 0], R^{n})\) represents the class of continuous functions from \([-\tau , 0]\) to \(R^{n}\). \(co\{F_{1}, F_{2}\}\) stands for closure of the convex hull of Q produced by quaternion numbers \(F_{1}, F_{2}\). The notation T denotes the transpose of a matrix. For any vector \(\chi \in R^{n}\), the vector norm is defined as \(\Vert \chi \Vert _{1}=\sum \nolimits _{q=1}^{n}|\chi _{q}|\). For any matrix \(A\in R^{n\times n}\), the matrix norm is defined as \(\Vert A\Vert _{1}=\max _{1\le q\le n}\{\sum \nolimits _{p=1}^{n}|a_{pq}|\}\), the matrix measure is defined as \(\mu _{1}(A)=\lim _{h\rightarrow 0^{+}}\frac{\Vert I+hA\Vert _{1}-1}{h}=\max _{q}\{a_{qq}+\sum _{p=1, p\ne q}^{n}|a_{pq}|\}\).
Model formulation and preliminaries
The quaternion is a kind of supercomplex number formed by one real part and three imaginary parts. A quaternion \(q\in Q\) can be described in the form
where \(q^{R}, q^{I}, q^{J}, q^{K}\in R\), the imaginary parts i, j, k obey the Hamilton rule:
Remark 1
Different from real number and complex number, the commutativity rule does not hold for quaternion multiplication, i.e., for any \(x, y\in Q\), it can not be ensured that \(xy=yx\). Due to this reason, some good properties in real field and complex field does not hold in quaternion field. Thus, existing approach dealing with RVNNs or CVNNs can not be directly applied to QVNNs, which lead to the need to develop new techniques and theories to cope with QVNNs.
The conjugate of q is denoted by \(q^{*}\) or \(\bar{q}\), \(\bar{q}=q^{R}-q^{I}i-q^{J}j-q^{K}k\). The modulus of q is defined as
For any vector \(x=(x_{1},\ldots ,x_{n})^{T}\in Q^{n}\), it is defined that \(|x|=(|x_{1}|,\ldots ,|x_{n}|)^{T}\), \(x^{*}=\bar{x}=(x^{*}_{1},\ldots ,x^{*}_{n})^{T}\). For any matrix \(A=(a_{pq})_{n\times n}\in Q_{n\times n}\), it is defined that \(|A|=(|a_{pq}|)_{n\times n}\). For two quaternion \(h=h^{R}+h^{I}i+h^{J}j+h^{K}k\) and \(q=q^{R}+q^{I}i+q^{J}j+q^{K}k\), the addition between them is defined as
By Hamilton rule, the product between them is defined as
With the introduction of memristive connection weights into QVNNs, the model of QVMNNs is constructed as follows:
where \(p=1, 2,\ldots , n\); \(x_{p}(t)\in Q\) denotes the state vector of the pth neuron at time t. \(d_{p}>0\) is the self-feedback coefficient; \(f_{p}(x_{p}(\cdot ))\) denotes the activation function. \(a_{pq}(x_{p}(t))\) and \(b_{pq}(x_{p}(t))\) stand for the quaternion-valued memristive connection weights. \(\tau (t)\) is the time delay satisfying \(\dot{\tau }(t)\le \mu <1\) and \(0\le \tau (t)<\tau \), where \(\mu \) and \(\tau \) are positive constants. The initial condition of system (1) is taken as \(x_{p}(s)=\phi _{p}(s), -\tau \le s\le 0\), where \(\phi _{p}(s)\in C^{(1)}([-\tau , 0], Q)\).
Taking system (1) as the master system and construct the following slave system
where \(u_{p}(t)\) is the appropriate controller to be determined later. Define \(e_{p}(t)=y_{p}(t)-x_{p}(t)\) as the synchronization error. Our aim is to design proper controller \(u_{p}(t)\) to realize the synchronization between system (1) and system (2). The error system of master-slave system is obtained below
According to the current-voltage characteristics and nature of memristor, the memristive weights can be defined as the state-dependent switching case:
where the switching jump \(T_{p}>0\), \(\hat{a}^{l}_{pq}, \check{a}^{l}_{pq}, \hat{b}^{l}_{pq}, \check{b}^{l}_{pq}\) are known constants with respect to memristances, \(l=R, I, J, K\).
Definition 1
For convenience of later analysis, the following definition is given:
For \(\pi =R, I, J, K\), it is noted that
By letting \(e(t)=(e_{1}(t),\ldots ,e_{n}(t))^{T}\in Q^{n}\), the compact form of error system (3) can be achieved
where \(f(x(\cdot ))=(f_{1}(x_{1}(\cdot )),\ldots ,f_{n}(x_{n}(\cdot )))^{T}\in Q^{n}\), \(g(e(t))=f(y(t))-f(x(t))\).
Assumption 1
Assume that the function \(f(x(t))\in Q^{n}\) can be decomposed into the following form
where functions \(f^{R}(x^{R}(t)), f^{I}(x^{I}(t)), f^{J}(x^{J}(t)), f^{K}(x^{K}(t))\in R^{n}\).
Let \(e(t)=e^{R}(t)+ie^{I}(t)+je^{J}(t)+ke^{K}(t)\). Then, according to Hamilton rule, the error system (3) can be separated into four real part as below
By making the definition that \(E(t)=(e^{R}(t)^{T}, e^{I}(t)^{T}, e^{J}(t)^{T}, e^{K}(t)^{T})^{T}\in R^{4n}\) and \(X(t)=(x^{R}(t)^{T}, x^{I}(t)^{T}, x^{J}(t)^{T}, x^{K}(t)^{T})^{T}\in R^{4n}\), then the compact form of (7) can be derived
where
Remark 2
Note that the elements of matrices \(\bar{A}_{x}, \bar{B}_{x}, \bar{A}_{y}, \bar{B}_{y}\) are variables that switching according to the value x, y. However, each element in these matrices has upper bound.
For the convenience of later discussion, the following notations are made
Assumption 2
For any \(x,y\in R^{4n}\), there exists positive constants \(L_{f}\) and positive scalar \(M=(M_{1},\ldots ,M_{4n})^{T}\in R^{4n}\), such that
where \(|F(x)|=(|F_{1}(x)|,\ldots ,|F_{4n}(x)|)^{T}\in R^{4n}\).
Definition 2
The quaternion master-slave system (1) and (2) is said to be synchronized if
It is equivalent to that
Definition 3
The quaternion master-slave system (1) and (2) is said to be quasi-synchronized if there exists a positive constant \(\varepsilon \) such that
It means that the error trajectory can converge to a bounded set.
Lemma 1
(Halanay inequality Halanay 1966) For continuous nonnegative functionV(t), assume that there exists positive constants\(\gamma , \beta >0\)such that the following conditions hold
then we obtain the conclusion
where\(\mu ^{*}>0\)is the unique positive solution of equation\(\mu -\beta +\gamma e^{\mu \tau }=0\).
Lemma 2
(Generalized Halanay Inequality Wen et al. 2008) For any nonnegative functionV(t), assume that there exists positive constant\(\xi \)and continuous function\(\alpha (t)\ge 0, \beta (t)\le 0, \gamma (t)\ge 0\)such that the following conditions hold
then we obtain the conclusion
where \(\alpha ^{*}=\sup _{-\infty \le s\le t_{0}}\alpha (s), \mu ^{*}=\inf _{t\ge t_{0}}\{\mu (t)| \mu (t)+\beta (t)+\gamma (t)e^{\mu (t)\tau (t)}=0\}.\)
Main results
In this part, we first consider the complete synchronization of master-slave system (1) and (2) by choosing the following feedback controller
where \(K=diag(k_{1},\ldots ,k_{4n}), \varGamma =diag(\gamma _{1},\ldots ,\gamma _{4n})\). Then, the global synchronization of master-slave system (1) and (2) can be obtained by using Halanay inequality.
Theorem 1
Under Assumption2, if there exists control gains matrices\(K, \varGamma \)such that the following condition holds
where\(d_{\min }=\min \{d_{1},\ldots ,d_{n}\}, k_{\min }=\min \{k_{1},\ldots ,k_{4n}\}, 1_{4n}=(1,\ldots ,1)^{T}\in R^{4n}\). Then the global synchronization between system (1) and (2) can be achieved under controller (21).
Proof
Considering the Lyapunov functional as below
Calculating the derivative of V(t) along the trajectory (11) yields
Based on above analysis, the synchronization between system (1) and (2) can be achieved under the controller (21). \(\square \)
Remark 3
For the first time, the memistive connection weights are brought into QVNNs. As the extension of memristive RVNNs and CVNNs, the weight connections \(a^{R}_{pq}(x_{p}(t)), a^{I}_{pq}(x_{p}(t)), a^{J}_{pq}(x_{p}(t))\) and \(a^{K}_{pq}(x_{p}(t))\) are decided by the corresponding imaginary unit of state vector \(x_{p}(t)\). Thus, the character of both MNNs and QVNNs are combined in this new model, which lead to more complex dynamical behavior in nonlinear systems. Hence, our work serves as the supplement for the previous results and enrich the theory of QVNNs.
Remark 4
The sign function in controller (21) plays an important role to eliminate the parameter mismatch caused by memristive connection weights. However, this may cause chattering phenomenon to control system. Moreover, the complete synchronization is rather rigorous for many real-life applications Ding et al. (2017), Ravishankar (2018), Wei et al. (2018), Bao et al. (2016). Usually, let the error restricted in an prescribed area is enough Nakamura and Tateno (2019). Thus, another type of synchronization is considered in the next.
In this part, we focus on the quasi-synchronization of master-slave system (1) and (2). Choose the controller below
where \(K=diag\{k_{1},\ldots ,k_{4n}\}\) is the control gains matrix.
Theorem 2
Under Assumption2, if there exists positive constant\(\xi \)and control gains matrixKsuch that the following condition holds
Then the quasi-synchronization between system (1) and (2) can be achieved under controller (26). The error trajectories will converge to the following set
where \(R_{1}=\Vert (\acute{A}-\grave{A}+\acute{B}-\grave{B})M\Vert _{1}\).
Proof
Considering the Lyapunov functional as below
Computing the derivative along of V(t) along the trajectory (11) yields
According to the Lemma 2, we have
where \(\mu ^{*}=\inf _{t\ge 0}\{\mu (t): \mu (t)+\mu _{1}(-\bar{D}-K)+\Vert \tilde{A}\Vert _{1}L_{f}+\Vert \tilde{B}\Vert _{1}L_{f}e^{\sigma \mu (t)}=0\}, \sigma =\mu _{1}(-\bar{D}-K)+\Vert \tilde{A}\Vert _{1}L_{f}.\) Therefore, quasi-synchronization between system (1) and (2) can be achieved under controller (26). \(\square \)
Remark 5
Compared with complete synchronization, quasi-synchronization is more practical and reasonable in many real applications. Through selecting appropriate control gains matrix K, the convergence field \(\varPsi \) can be constrained to any domain that we needed. Moreover, the controller for quasi-synchronization does not contain sign function, thus the chattering phenomenon can be effectively avoided.
In the following part, we focus on the synchronization of master-slave QVMNNs via event-triggered control. Considering the following event-triggered controller
where the event-triggered instants \(t_{k}, k=1,\ldots ,n\) are determined iteratively by the rule below
where \(\hat{E}(t)=E(t)-E(t_{k})\) for \(t\in [t_{k},t_{k+1})\), \(\delta =-d_{\min }+\Vert \tilde{A}\Vert _{1}L_{f}+\frac{1}{1-\rho }\Vert \tilde{B}\Vert _{1}\Vert L_{f}-k_{\min }, \zeta =-2\cdot 1_{4n}^{T}[(\acute{A}-\grave{A})+(\acute{B}-\grave{B})]M+\sum _{p=1}^{4n}\gamma _{p}>0\), \(\alpha \) is a constant satisfying \(0<\alpha <1\), \(1_{4n}=(1,\ldots ,1)^{T}\in R^{4n}\).
Theorem 3
Under Assumption2, if the control gains\(k_{p}, \gamma _{p}, p=1,\ldots ,4n\)satisfy the following conditions
where\(k_{\min }=\min _{p=1,\ldots ,4n}\{k_{p}\}, d_{\min }=\min _{p=1,\ldots ,4n}\{d_{p}\}\). \(\theta =(\theta _{1},\ldots ,\theta _{4n})^{T}\in R^{4n}\)is an vector satisfying\(\theta \ge 2[(\acute{A}-\grave{A})+(\acute{B}-\grave{B})]M\). Then the synchronization between system (1) and (2) can be achieved under controller (32) and event-triggered strategy (33).
Proof
Considering the Lyapunov functional as below
For \(t\in [t_{k},t_{k+1})\), computing the derivative of V(t) along the trajectory (11) yields
Based on above analysis, the synchronization between system (1) and (2) can be achieved under the controller (32) and event-triggered strategy (33). \(\square \)
Remark 6
It can be seen that, compared with the control method proposed in [8], Bao and Cao (2014), Ding et al. (2017), Ravishankar (2018), Wei et al. (2018), Bao et al. (2016), Nakamura and Tateno (2019), event-triggered strategy not only ensure the system performance but also reduce the sampled times and computation burden. Thus the network resource is saved and the communication efficiency can be effectively improved. In fact, the traditional feedback controller can be regarded as the special case of the event-triggered controller. Moreover, to ensure the proposed event-triggered control can be applied in real practise, it is important to avoid the condition that event be triggered infinite times during finite time interval, i.e., Zeno behavior.
Later, we prove that the Zeno behavior can be excluded via the event-triggered strategy (33).
Theorem 4
With the condition of Theorem3hold, then there is no Zeno-behavior for the considered system under the event-triggered strategy (33).
Proof
Considering the Lyapunov functional as below
Computing the derivative of V(t) along the trajectory (11) yields
where \(W=2(\Vert \tilde{A}\Vert _{1}+\Vert \tilde{B}\Vert _{1})\Vert M\Vert _{1}+(\Vert \bar{D}\Vert _{1}+\Vert K\Vert _{1})\Vert E(t_{k})\Vert _{1}+\sum _{p=1}^{4n}\gamma _{p}.\) Note that \(\Vert \hat{E}(t_{k})\Vert _{1}=0\), solving the inequality (39), we have
Utilizing the triggered condition (33), it follows that
Then, we have
Due to \(\dot{V}(t)\le 0\), it can be obtained
Thus, W is bounded and we can achieve that
Based on above analysis, Zeno behavior can be avoided under the event-triggered strategy (33). \(\square \)
Remark 7
It can be infer from above proof that if the triggered condition (33) be changed to \(t_{k+1}=\inf \{t: t>t_{k}, k_{\max }\Vert \hat{E}(t)\Vert _{1}\ge \alpha \delta \Vert E(t)\Vert _{1}\}\), the synchronization objective can also be achieved. However, Zeno behavior may occur in this case. Hence, the constant \(\zeta \) in (33) plays an significant role to eliminate Zeno behavior.
Numerical examples
To show the effectiveness of our theoretical results, some simulation example is given in this section. The principal of Theorem 2 is similar to Theorem 1, thus, we mainly focus on the simulation of Theorems 1 and 3.
Example 1
Consider the QVMNNs with 2 neurons as below
where \(d_{1}=1.1, d_{2}=1.1\) and the memristive connection weights are given as below. For convenience, \(x^{l}_{p}(t)\) is simplified to \(x^{l}_{p}, l=R, I, J, K\).
where the transmission delay is \(\tau (t)=0.5\sin (t)+0.5\), thus \(\tau =1, \dot{\tau }(t)\le \rho =0.5\le 1\). The activation function is considered as
which implies that \(l^{R}_{1}=l^{R}_{2}=l^{I}_{1}=l^{I}_{2}=l^{J}_{1}=l^{J}_{2}=l^{K}_{1}=l^{K}_{2}=1, M=(1,1,1,1,1,1,1,1)^{T}.\) The slave system is
The corresponding error system can be obtained as
Choose \(U(t)=-KE(t)-\varGamma sgn(E(t))\), from the memristive connection weights, it can be obtained that
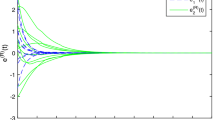
Thus, \(\Vert \tilde{A}\Vert _{1}=1.5, \Vert \tilde{B}\Vert _{1}=1.6\). It can be obtained from the condition of Theorem 1 that \(k_{\min }\ge -d_{\min }+\Vert \tilde{A}\Vert _{1}L_{f}+\frac{1}{1-\rho }\Vert \tilde{B}\Vert _{1}\Vert L_{f}=3.6\), \(\varGamma \ge 2[(\acute{A}-\grave{A})+(\acute{B}-\grave{B})]M=(6.4,6.6,6.4,6.6,6.4,6.6,6.4,6.6)^{T}\). Choose \(\alpha =0.5, k_{p}=4, \gamma _{p}=7\). Take 20 initial random conditions, Figs. 1 and 2 describes the synchronization errors \(e^{R}_{1}, e^{I}_{1}, e^{J}_{1}, e^{K}_{1}, e^{R}_{2}, e^{I}_{2}, e^{J}_{2}, e^{K}_{2}\) between system (45) and (48) with controller (21), respectively. According to the simulation results, the drive system (45) and response system (48) can be synchronized under controller (21), which verify the correctness of Theorem 1. Choosing 10 initial conditions in the interval \([-\,0.3, 0.3]\), the synchronization error between system (45) and (48) is shown in Figs. 1, 2, 3 and 4, which verify the effectiveness of Theorem 1.
Next, we consider the event-triggered case.

Trajectories of system (49)

Trajectories of system (49)

Trajectories of system (49)

Trajectories of system (49)
Example 2
Consider the same master-slave QVMNNs given in Example 1.
Choose the event-triggered controller as
According to Theorem 3, the event-triggered condition can be calculated as
It can be obtained from the condition of Theorem 3 that \(k_{\min }\ge 3.8\), \(\theta \ge 2[(\acute{A}-\grave{A})+(\acute{B}-\grave{B})]M=(6.4,6.6,6.4,6.6,6.4,6.6,6.4,6.6)^{T}\). Choose \(\alpha =0.5, k_{p}=4, \theta _{p}=7, \delta =d_{\min }-\Vert \tilde{A}\Vert _{1}L_{f}-\frac{1}{1-\rho }\Vert \tilde{B}\Vert _{1}\Vert L_{f}+k_{\min }=0.4, \zeta =-2\cdot 1^{T}[(\acute{A}-\grave{A})+(\acute{B}-\grave{B})]M+\sum _{p=1}^{4n}\gamma _{p}=4>0\). Thus, the initial condition can be chosen as \(x^{l}_{p}(s)\le 0.18, s\in [-\tau , 0], p=1, 2, l=R, I, J, K\). Choosing 10 initial conditions in the interval \([-0.18, 0.18]\), the simulation results are shown in Figs. 5, 6, 7 and 8, which verify the effectiveness of Theorem 3.

Trajectories of system (50)

Trajectories of system (50)

Trajectories of system (50)

Trajectories of system (50)
Conclusion
In this paper, we introduced the memristive connection weights into QVNNs to construct the QVMNNs, which is a new class of network model with the character of both MNNs and QVNNs. The master-slave synchronization problem of QVMNNs are studied by designing traditional feedback controller and event-triggered controller correspondingly. Applying the Lyapunov method, several criteria guaranteeing the synchronization of drive-response QVMNNs are obtained. Besides, the Zeno behavior can be avoided in event-triggered control. Finally, simulation examples are given to verify the correctness of our results.
Our future research will concentrate on these aspects: 1) The finite-time synchronization of QVMNNs with pinning control. 2) The dynamical behavior of coupled QVMNNs with imperfect communication, such as packet dropout and quantization.
References
Adler SL (1995) Quaternionic quantum mechanics and quantum fields. Oxford University Press, New York
Bao H, Cao J (2014) Projective synchronization of fractional order memristor-based neural networks. Neural Netw 63:1–9
Bao H, Park JH, Cao J (2016) Exponential synchronization of coupled stochastic memristor-based neural networks with time-varying probabilistic delay coupling and impulsive delay. IEEE Trans Neural Netw Learn Syst 27(1):190–201
Cao Y (2019) Bifurcations in an Internet congestion control system with distributed delay. Appl Math Comput 347:54–63
Cao J, Guerrini L, Cheng Z (2019) Stability and Hopf bifurcation of controlled complex networks model with two delays. Appl Math Comput 343:21–29
Chen J, Zeng Z, Jiang P (2014) Global Mittag-Leffler stability and synchronization of memristor-based fractional-order neural networks. Neural Netw 51:1–8
Chen L, Wu R, Cao J, Liu J (2015) Stability and synchronization of memristor-based fractional-order delayed neural networks. Neural Netw 71:37–44
Chen X, Li Z, Song Q, Hu J, Tan Y (2017) Robust stability analysis of quaternion-valued neural networks with time delays and parameter uncertainties. Neural Netw 91:55–65
Chen X, Song Q, Li Z, Zhao Z, Liu Y (2018) Stability analysis of continuous-time and discrete-time quaternion-valued neural networks with linear threshold neurons. IEEE Trans Neural Netw Learn Syst 29(7):2769–2781
Chen X, Song Q (2017) State estimation for quaternion-valued neural networks with multiple time delays. IEEE Trans Syst Man Cybern Syst. https://doi.org/10.1109/TSMC.2017.2776940
Chua LO (1971) Memristor-the missing circuit element. IEEE Trans Circuit Theory 18:507–519
Dharani S, Rakkiyappan R, Cao J, Alsaedi A (2017) Synchronization of generalized reaction-diffusion neural networks with time-varying delays based on general integral inequalities and sampled-data control approach. Cogn Neurodyn 11(4):369–381
Ding X, Cao J, Alsaedi A, Hayat T (2017) Robust fixed-time synchronization for uncertain complex-valued neural networks with discontinuous activation functions. Neural Netw 90:42–55
Guo Z, Gong S, Wen S, Huang T (2018) Event-based synchronization control for memristive neural networks with time-varying delay. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2018.2839686
Halanay A (1966) Differential equations: stability, oscillations, time lags, vol 23. Academic, New York
Huang C, Liu B (2019) New studies on dynamic analysis of inertial neural networks involving non-reduced order method. Neurocomputing 325:283–287
Huang C, Zhang H (2019) Periodicity of non-autonomous inertial neural networks involving proportional delays and non-reduced order method. Int J Biomath 12(2):1950016
Huang C, Yang Z, Yi T, Zou X (2014) On the basins of attraction for a class of delay differential equations with non-monotone bistable nonlinearities. J Differ Equ 256:2101–2114
Huang C, Su R, Cao J, Xiao S (2019) Asymptotically stable of high-order neutral cellular neural networks with proportional delays and D operators. Math Comput Simul. https://doi.org/10.1016/j.matcom.2019.06.001
Isokawa T, Kusakabe T, Matsui N, Peper F (2003) Quaternion neural network and its application. In: Proc. 7th int. conf. KES, Oxford, U.K., pp 318–324
Li L, Ho D, Cao J, Lu J (2016) Pinning cluster synchronization in an array of coupled neural networks under event-based mechanism. Neural Netw 76:1–12
Liu Y, Zhang D, Lu J, Cao J (2016) Global \(\mu \)-stability criteria for quaternion-valued neural networks with unbounded time-varying delays. Inf Sci 360:273–288
Liu H, Wang Z, Shen B, Liu X (2017a) Event-triggered state estimation for delayed stochastic memristive neural networks with missing measurements: the discrete time case. IEEE Trans Neural Netw Learn Syst 29(8):3726–3737
Liu Y, Zhang D, Lu J (2017b) Global exponential stability for quaternionvalued recurrent neural networks with time-varying delays. Nonlinear Dyn 87(1):553–565
Liu Y, Zhang D, Lou J, Lu J, Cao J (2018) Stability analysis of quaternion-valued neural networks: decomposition and direct approaches. IEEE Trans Neural Netw Learn Syst 29(9):4201–4211
Liu D, Zhu S, Sun K Global anti-synchronization of complex-valued memristive neural networks with time delays. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2018.2812708
Nakamura O, Tateno K (2019) Random pulse induced synchronization and resonance in uncoupled non-identical neuron models. Cogn Neurodyn 13(3):303–312
Qin S, Feng J, Song J, Wen X, Xu C (2018) A one-layer recurrent neural network for constrained complex-variable convex optimization. IEEE Trans Neural Netw Learn Syst 29(3):534–544
Ravishankar A (2018) An oscillatory neural network model that demonstrates the benefits of multisensory learning. Cogn Neurodyn 12(5):481–499
Sahoo A, Xu H, Jagannathan S (2016) Neural network-based event-triggered state feedback control of nonlinear continuous-time systems. IEEE Trans Neural Netw Learn Syst 27(3):497–509
Simmons GF (1992) Calculus gems: brief lives and memorable mathematics. McGraw-Hill, New York
Song Q, Chen X (2018) Multistability analysis of quaternion-valued neural networks with time delays. IEEE Trans Neural Netw Learn Syst 29(11):5430–5440
Strukov D, Snider G, Stewart D, Williams RS (2008) The missing memristor found. Nature 453:80–83
Took CC, Mandic DP (2009) The quaternion LMS algorithm for adaptive filtering of hypercomplex processes. IEEE Trans Signal Process 57(4):1316–1327
Tu Z, Cao J, Alsaedi A, Hayat T (2017) Global dissipativity analysis for delayed quaternion-valued neural networks. Neural Netw 89:97–104
Wang L, Wang Z, Wei G, Alsaadi F (2018) Finite-time state estimation for recurrent delayed neural networks with component-based event-triggering protocol. IEEE Trans Neural Netw Learn Syst 29(4):1046–1057
Wei R, Cao J, Alsaedi A (2018) Finite-time and fixed-time synchronization analysis of inertial memristive neural networks with time-varying delays. Cogn Neurodyn 12(1):121–134
Wen L, Yu Y, Wang W (2008) Generalized Halanay inequalities for dissipativity of Volterra functional differential equations. J Math Anal Appl 347(1):169–178
Wu A, Zeng Z (2014) Lagrange stability of memristive neural networks with discrete and distributed delays. IEEE Trans Neural Netw Learn Syst 25(4):690–703
Xia Y, Jahanchahi C, Mandic DP (2015) Quaternion-valued echo state networks. IEEE Trans Neural Netw Learn Syst 26(4):663–673
Yang C, Huang L, Li F (2018) Exponential synchronization control of discontinuous nonautonomous networks and autonomous coupled networks. Complexity 2018:1–10
Zhang G, Shen Y (2014) Exponential synchronization of delayed memristor-based chaotic neural networks via periodically intermittent control. Neural Netw 55:1–10
Zou C, Kou K, Wang Y (2016) Quaternion collaborative and sparse representation with application to color face recognition. IEEE Trans Image Process 25(7):3287–3302
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported by the Scientific Research Foundation of Graduate School of Southeast University under Grant No. 3207019703 and Innovation project for College Graduates of Jiangsu Province of China under Grant No. KYCX18-0054.
Rights and permissions
About this article

Cite this article
Wei, R., Cao, J. Synchronization control of quaternion-valued memristive neural networks with and without event-triggered scheme. Cogn Neurodyn 13, 489–502 (2019). https://doi.org/10.1007/s11571-019-09545-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11571-019-09545-w