
The general solution of the boundary problem of planar vibrations of parallelogram-shaped piezoceramic plates is constructed. The solution is presented as infinite series, with each term satisfying the motion equations of a piezoceramic plate element. The series coefficients are determined with functional equations, generated by the boundary conditions of the problem. These equations can be solved using the two approaches, based on minimization of the standard deviation and the collocation method. In the case of practical application of finite sums, both approaches lead to the search of solving the systems of linear algebraic equations. Quantitative estimates of the dynamic characteristics of piezoceramic plates are obtained, their analysis permits of evaluating the plate geometry effect. This method provides high accuracy of calculation results.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction. Piezoelectric effect-incorporated materials provide a means for easy excitation of vibrations in elastic solid bodies. Studies on such vibrations are of interest both for understanding the general behavior of elastic waves in bounded regions and for elaboration of recommendations on solving the design problems in the development of electromechanical transducers [1, 2]. At present particular emphasis is placed upon the development of microtransducers of various types termed as MEMS (Micro Electro Mechanical Systems) [3].
One way of controlling the dynamic characteristics of active MEMS elements is the piezoelectric element shape change, which makes the studies on elaboration of solution methods for the dynamic problems of electroelasticity currently central for the elements of different geometry. The analytical method of solving the boundary electroelasticity problems for parallelogram-shaped piezoelectric plates is presented below. The change in their shape may be considered as the excitation of the shape of rectangular plates.
Special attention is drawn to elaboration of the analytical solution method for boundary problems. The analytical solution provides the basis for an in-depth analysis of vibratory system properties. Such potentials may be illustrated by investigation results for the edge resonance phenomenon in elastic plates, including piezoceramic ones. The fact that all amplitudes of inhomogeneous waves reach their maximum at the edge resonance frequency is important for proper understanding of this phenomenon.
The construction of the analytical problem solution for a parallelogram-shaped plate makes use of the method based on the superposition of motion equation solutions represented as infinite series and set so to satisfy arbitrary conditions at the parallelogram boundary. The validity and efficiency of such an approach are outlined in [4,5,6,7].
Determining the coefficients of series, entering into the representation of general solutions of boundary problems, results in the infinite systems of algebraic equations. In addition to the direct accuracy evaluation of fulfilling the boundary conditions, the possibility of getting the numerical solution is realized and the results of two calculations are compared. Such a comparison is helpful both for additional verification of analytical estimates and elaboration of recommendations on the choice of necessary discretization steps in numerical calculations.
Basic Relations of the Theory of Planar Vibrations for Thin Electrodeposited Piezoelectric Plates with Thickness Polarization on the Electric Field Excitation. Planar vibrations of thin piezoceramic plates with thickness polarization are described with the vector equation of motion in displacements (Lame equation), which for the case of solid electrodes, coating face flat plate surfaces takes on the following form [2]:
where u is the two-dimensional displacement vector with the ux and uy components in the system of Cartesian
coordinates, u = u (x, y, t), the Ox and Oy axes lie in the plate plane, the Oz axis is normal to it, ρ is the density,
\( {s}_{11}^E \) and \( {s}_{12}^E \) are the elastic compliances of the piezoelectric material, measured in the zero electric field, v is
Poisson’s ratio in the plane normal to the direction of material polarization (in the isotropy plane), \( v=-{s}_{12}^E/{s}_{11}^E \):
The two-dimensional stress tensor components for thin piezoceramic plates are expressed as [2]
where εx , εy , and εxy are the strains [8], d31 is the piezoelectric constant, Ez = Ez (t) is the component of the electric intensity vector E, which has only one nonzero component in the Oz axis direction normal to the electrode plate coatings.
For excitation of plate vibrations 2h thick from the voltage generator with the output potential difference 2V0 (t), applied to the electrode coatings on its face, we have
Correspondingly the stress vector components Fn on the elementary area with the unit normal n are expressed as [2]
When setting the stress conditions at the boundary, the normal and tangential stress vector components are usually considered
General Solutions in Potentials. Motion equation in displacements (1) is rather complicated, thus, in some cases, also in analytical studies, the elastic displacement field u = u(x, y, t) is convenient to calculate passing on to the Helmholtz representation via the scalar φ(x, y, t ) and vector ψ(x, y, t ) potentials [1]
In this two-dimensional case, the vector potential ψ possesses the only nonzero component ψz = ψ in the Oz axis direction. In terms of this, substituting (8) into (1) and considering that div grad φ = ∇2φ and rot rot ψ = grad div ψ − ∇2ψ as well as the identities rot grad φ ≡ 0 and div rot φ≡ 0 , we get the following wave equations relative to the scalar potential φ and nonzero component of the vector potential ψ
where the first and second ones describe the propagation of longitudinal and transverse waves in the plate plane, respectively, with the velocities
In view of (10), Eqs. (9) take on the form
With the computation rules of vector operations grad(·) and rot(·) as well as with ψ = k (x, y) in the plane problem, where ψ (x, y)= ψz is the scalar function, ψx = 0, ψy = 0, and for the components of initial vector field of displacements u = i ux + j ux, we get expressions for the displacement components by Eq. (8)
On the excitation of harmonic plate vibrations with the ac field from the voltage generator, assume the harmonic time dependence of the examined values
where \( i=\sqrt{-1} \) is the imaginary unit, ω = 2πf is the circular frequency (rad/s), and f is the natural (Hertzian) frequency, Hz.
Then the harmonic multiplier exp(i𝜔t) is omitted, and by the u, φ, ψ, etc. values are meant their amplitudes. Thus, substituting (13) into (11), we obtain the Helmholtz scalar equations
where k1 and k2 are the wave numbers of the longitudinal and transverse waves in the plate
The transformation of stress tensor components for plane problem (3) in accordance with the representation of displacement vector components via Helmholtz potentials (12) in view of Cauchy formula for strains (4) and expression for the loading electric field (5) results in the equalities
On setting the normal \( {\overline{F}}_n \) and tangential Fτ stresses at the plate contour, the boundary conditions take on the following form:
where G is the shear modulus, \( {\displaystyle \begin{array}{cc}G=\frac{1}{2{s}_{11}^E\left(1+v\right)},& -\end{array}}2G\frac{\left(1+v\right)}{\left(1-v\right)}{d}_{31}\frac{V_0}{h} \) in the right side of equality (17a) appears as a result of the relation between electric and mechanical fields, it is also proportional to the piezoelectric constant d31 and amplitude of the external electric field intensity. Then denote it as \( {\overline{F}}_n^{Veq} \). Notice that the terms in the left side of (17) correspond to the normal and tangential stress vector components related to elastic strain, which may be designated \( {\sigma}_n^{def} \) and \( {\sigma}_{\uptau}^{def} \).
Equation (17) may be rewritten in the reduced form as
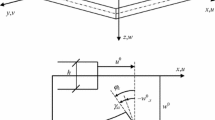
Statement of the Problem. Within the above model, examine the problem of harmonic vibrations of a thin piezoceramic plate with mechanical stress-free edges, OBCD parallelogram-shaped with the angles α in the O and C apexes and side sizes OD = BC = a, OB = CD = b (Fig. 1). The conditions for the stresses at the parallelogram boundary take the form (17) at

Parallelogram-shaped piezoceramic plate.
Enter the two systems of Cartesian coordinates Ox1y1 and Ox2y2 with their origin in the point O (Fig. 1). The relation between the coordinates in those systems has the form
The solution for φ and ψ may be presented as the sum (superpositions) of potentials that are the solutions of Helmholtz equations (14)
Each of the potentials φi and ψi is represented by the series as
where δ1 = GB and δ2 = FD (Fig. 1).
The form of series (22) was chosen so that at ith sides of the parallelogram, φi and ψi represented the series expanded by the complete trigonometric bases.
Substituting φj and \( {\psi}_j\left(j=\overline{1,4}\right) \) into Helmholtz equations (14), we come to the system of independent homogeneous differential equations of second order with the constant coefficients relative to the functions \( {A}_i^{(j)} \) and \( {B}_i^{(j)} \) entering into representations (22). Solving these equations and choosing the solutions of the differential ones, from the considerations of independence of basis functions and exponent damping inwards from the parallelogram sides, we get the explicit expressions for \( {A}_i^{(j)} \) and \( {B}_i^{(j)} \) against the relations λn = n𝜋/a and μm=n𝜋/a and wave numbers k1 and k2 (15) for each n and m:
Thus, series (22) for φi and ψi in view of (23) are the series in terms of the two-dimensional basis functions, which would be denoted ,Φij (xk , yk) and Ψij (xk , yk) for short with the coefficients Aij and \( {B}_{ij}\left(i=\overline{1,4},k=1,2\right) \), respectively.
Computer Simulation of Plate Vibrations. The prime object of mathematical simulation of physical vibrations is evaluating their quantitative characteristics against the geometric parameters of the domain of their existence and boundary conditions. As a rule, it may be reached with several iterative processes, e.g., with an increase in the number of Fourier series terms used for the representation of a desired function. Effective realization of the iterative processes would require such characteristics that provide the process stability and getting reliable quantitative estimates. Note that the superposition method, allowing for the construction of general solutions of boundary problems, just exhibits such properties. The stability and convergence of computational procedures on its realization are effected by the completeness of fundamental properties used for representing the function values.
For obtaining the quantitative stress and displacement estimates for the plates, we go in representations (22) from the infinite series to the finite sums in terms of n and m to N − 1 and M − 1, respectively (reduction method) [9,10,11,12]. Further the problem solution is reduced to evaluating 4(N + M) unknown coefficients in reduced functional representations (22) based on approximate satisfying single collocation points or on the standard deviation minimization method (projection method) for the boundary conditions at the parallelogram sides OD (I), BC (II), CD (III), and OB (IV) (Fig. 1).
Collocation Method. The solution of the problem of planar vibrations for a parallelogram-shaped piezoceramic plate with the free edge with the collocation method would require to fulfill preset conditions for normal and tangential stresses (17), (19) in some boundary points (collocation points), they [8] may be chosen as mid-sections of uniform division into N parts of boundaries I and II and M parts of boundaries III and IV (Fig, 1). Thus, we have 2(N + M) collocation points with the coordinates \( \left({x}_i^c,{y}_i^c\right) \) , in each of them the outward normal vector with the components nx , ny is preset. As a result, for each collocation point, the two linear algebraic equations are formed against the coefficients Aij, Bij of truncated series. Solving this system and substituting the computed values of the coefficients into corresponding representations for φi , ψi (22) as well as calculating their superposition by formulas (21), we get a required approximate solution of an examined boundary problem in potentials. After that, the necessary components of displacements and stresses are computed with (12) and (16). Similar transformations were performed earlier [13, 14].
Standard Deviation Minimization Method. Another method of approximate satisfying the boundary conditions for solving the boundary problem consists in successive multiplication of residuals of the conditions at boundaries I , II and III , IV (Fig. 1) by independent functions from the functional bases, used for the solution representation, and integration of the products over corresponding boundaries I–IV, i.e., computation of scalar products (projection) of residuals by the basis functions, equalled zero [12]. As a result, the system of linear algebraic equations is obtained against the coefficients of series expansions Aij , Bij . In this case, the trigonometric functions are chosen as the projected ones that enter as cofactors into the two-dimensional basis functions \( {\varPhi}_{ij}\left({x}_y,{y}_y\right),{\varPsi}_{ij}\left({x}_y,{y}_y\right),\cos \frac{\tilde{n}\uppi}{a}{x}_1 \) at boundary I, \( \cos \frac{\tilde{n}\uppi}{a}\left({x}_1-{\updelta}_1\right) \) at boundary II ,\( \tilde{n}=\overline{0,N-1},\cos \frac{\tilde{m}\uppi}{b}\left({y}_2-{\updelta}_2\right) \) at boundary III , and \( \cos \frac{\tilde{m}\pi }{b}{y}_2 \) at boundary \( \tilde{m}=\overline{0,M-1} \) (Fig. 1). In the majority of cases, the accuracy of approximate solutions, obtained by this method, is somewhat higher than with the collocation method.
Theoretical models became the basis for software elaboration to numerically simulate the planar plate vibrations, realizing both the collocation and standard deviation minimization methods in approximate satisfying the boundary conditions. In many cases, it is convenient to pass on to dimensionless boundary conditions for stresses, normalizing them in (17) by the shear modulus G.
Numerical simulation was carried out for piezoceramic plates from a PZT-4 material, its characteristics are cited in [2, 15]: \( {s}_{11}^E=12.3\cdot {10}^{-2}{\mathrm{m}}^2/\mathrm{N},{s}_{12}^E=4.05\cdot {10}^{-2}{\mathrm{m}}^2/\mathrm{N},v=-{s}_{12}^E/{s}_{11}^E=0.329268\dots \approx 0.33,\uprho =7500\mathrm{kg}/{\mathrm{m}}^3 \).
For getting the amplitude-frequency characteristics of examined piezoceramic plates with solid two-sided electrodepositing, the dimensionless equivalent exciting load \( {F}_n^{Veq} \) was assumed to be equal to -1.
Calculation results for the above characteristics of a parallelogram-shaped plate of the dimensions a = 34.54 mm, b = 45.69 mm and the angle α = / 80 by the collocation method for N = M = 60 are presented in Fig. 2.

Amplitude-frequency characteristics of a parallelogram-shaped piezoceramic plate (σΣ = ∣ σx + σy∣ is the modulus of the sum of dimensionless principal stresses in the plate center).
The amplitude-frequency characteristics obtained by numerical simulation with the collocation method at N = M = 90 and the standard deviation minimization method at N = M = 60 and 90 as well as resonant frequencies do not practically differ from the data cited in Fig. 2.
The closeness of those values corroborates high accuracy of the analytical method and its efficiency in solving practical problems of dynamics research for piezoceramic plates of non-canonical shape.
Computation (fcomp) and experimental (fexp) studies on the vibrations of a piezoelectric plate resulted in the following resonant frequency values (kHz): fcomp = 31.69, 34.93, 41.52, 51.54, 56.77, 66.69, 78.82, fexp = 31.05, 34.35, 40.40, 49.55, 55.72, 65.14, 77.33.
When comparing calculation and experimental data on natural frequency spectra, the following should be considered. The computations were performed for the model of an ideally elastic material. In the experiment, the material exhibits its true properties, in particular internal damping. As regards the natural frequencies, the damping results in resonant frequency drift. Moreover, for such a case, the difference in natural frequencies by angular velocities and drifts should be considered since those are resonances of different types.
It is complicated by the fact that the damping is greatly dependent on the frequency. This should be taken into account in the comparison of results. It is also important that it is impossible to experimentally realize the boundary conditions preset exactly in the computation scheme.
For evaluating the accuracy of solution results, the errors of satisfying the boundary conditions are depicted in Figs. 3 and 4:

Comparison of errors of satisfying the boundary conditions for the normal \( {\sigma}_n^{err} \) (a, b) and tangential \( {\sigma}_{\tau}^{err} \) (c, d) stresses at boundary I of a parallelogram-shaped piezoceramic plate by the collocation method: (a, c)N = M = 60; (b, d)N = M = 90.

Comparison of errors of satisfying the boundary conditions for the normal \( {\sigma}_n^{err} \) (a, b) and tangential \( {\sigma}_{\tau}^{err} \) (c, d) stresses at boundary I of a parallelogram-shaped piezoceramic plate by the standard deviation minimization method: (a, c)N = M = 60; (b, d)N = M = 90.
where comp denotes computed values and err means error values.
In the construction of error spectra by the collocation method, the data in the vicinity of angular points in Fig. 3 are presented incompletely since here the error is somewhat growing, but does not surpass 10−3 loads preset at the boundary. Analysis of results demonstrates their good agreement since both methods neglect the contribution from higher harmonics in satisfying the boundary conditions, such residual behavior, viz high variability along the coordinate, is quite natural.
Comparison of results for the two systems of collocation points (60 and 90) shows that an increase in their number results in higher accuracy of satisfying the boundary conditions. The same is valid for an increase in the number of projection functions in the case of the standard deviation minimization method. However, with a similar number of terms, the accuracy of results is somewhat higher.
Of interest is a relatively high error within very narrow regions near the ends of boundary segments. This is apparently the specific feature of the collocation method (Fig. 3). However, the application, e.g., of the projection method eliminates this shortcoming (Fig. 4). In evaluating such integral characteristics of the vibratory system, as natural frequencies, both methods provide practically the same accuracy at a similar number of hold terms in infinite series.
Conclusions. Calculation results for the dynamic characteristics of parallelogram-shaped piezoelectric plates demonstrate that the method of analytical electroelasticity problem solution for the non-canonical domain provides their reliable quantitative estimates. The quantitative estimates of vibrating plate characteristics by both proposed algorithms are shown to be practically similar. At the same time, the collocation method would require a smaller body of analytical transformations.
Thus, expressions (22) offer an exact general solution of the boundary problem of planar vibrations of a piezoceramic plate in the form of infinite series. The number of hold terms is essential for a required accuracy level to get the quantitative estimates of physical values. For evaluating the necessary coefficients, the boundary problem conditions were used. The corresponding functional equations for the finite number (N and M) of hold terms may be transformed into algebraic relations by the two different methods. The two approaches to the solution of functional equations, expressing the boundary problem conditions, are proposed. One of them is known in applied mechanics as the collocation method [12] when the functional equation is transformed into the algebraic equalities for a certain system of points at the boundary. In terms of computability, it is a rather simple method of deriving the algebraic relations. From our viewpoint, another method of deducing the algebraic relations, more adequate for the traditional statement of boundary problems in mechanics, is based on the principle of standard deviation minimization in the fulfillment of boundary conditions. Quantitative estimates were obtained using both methods, with the comparison of the results.
Comparison of the results with experimental frequency characteristics of vibrations of parallelogram-shaped piezoceramic plates, which would be presented in the next study, corroborated a high accuracy of the proposed analytical approach to the investigation of planar vibrations of plates of non-canonical shape.
References
V. T. Grinchenko and V. V. Meleshko, Harmonic Vibrations and Waves in Elastic Bodies [in Russian], Naukova Dumka. Kiev (1981).
A. N. Guz’ (Ed.), Mechanics of Coupled Fields in Structure Elements [in Russian], in 5 volumes, Vol. 5: V. T. Grinchenko, A. F. Ulitko, and N. A. Shul’ga, Electroelasticity, Naukova Dumka, Kiev (1989).
R. Ghodssi and P. Lin, MEMS Materials and Processes Handbook, Springer Verlag (2011).
P. Shakeri Mobarakeh and V. T. Grinchenko, “Construction method of analytical solutions to the mathematical physics boundary problems for non-canonical domains,” Rep. Math. Phys., 75, No. 3, 417–434 (2015).
A. Krushynska, V. Meleshko, C.-C. Ma, and Y.-H. Huang, “Mode excitation efficiency for contour vibrations of piezoelectric resonators,” IEEE T. Ultrason. Ferr., 58, No. 10, 2222–2238 (2011).
V. L. Karlash, “Evolution of the planar vibrations of a rectangular piezoceramic plate as its aspect ratio is changed,” Int. Appl. Mech., 43, No. 7, 786–793 (2007).
I. V. Andrianov, V. V. Danishevskii, and A. O. Ivankov, Asymptotical Methods in the Theory of Vibrations of Beams and Plates [in Russian], PDABA, Dnepropetrovsk (2010).
S. P. Timoshenko and J. N. Goodier, Theory of Elasticity, 3rd edn, McGraw-Hill, New York (1970).
P. Shakeri Mobarakeh, V. Grinchenko, and B. Soltannia, “Directional characteristics of cylindrical radiators with an arc-shaped acoustic screen,” J. Eng. Math., 103, No. 1, 97–110 (2017). DOI: https://doi.org/10.1007/s10665-016-9863-9.
P. Shakeri Mobarakeh, V. T. Grinchenko, and G. M. Zrazhevsky, “A numerical-analytical method for solving boundary value problem of elliptical type for a parallelogram shaped plate,” Bull. Taras Shevchenko Nat. Univ. Kyiv. Ser. Physics & Mathematics, Special issue, 297–304 (2015).
P. Shakeri Mobarakeh and G. M. Zrazhevsky, “Galerkin algorithm in the method of partial regions of boundary problem solutions,” Bull. Taras Shevchenko. Nat. Univ. Kyiv. Ser. Physics & Mathematics, Issue 1, 75–82 (2014).
O. C. Zienkiewicz, R. L. Taylor, and D. D. Fox, The Finite Element Method for Solid and Structural Mechanics, 7th edn, Butterworth-Heinemann, Oxford (2013).
P. Shakeri Mobarakeh, V. T. Grinchenko, S. Iranpour Mobarakeh, and B. Soltannia, “Influence of acoustic screen on directional characteristics of cylindrical radiator,” in: Proc. of 5th Int. Conf. on Acoustics and Vibration (ISAV2015, Tehran, Iran, 2015).
P. Shakeri Mobarakeh, V. T. Grinchenko, H. Ahmadi, and B. Soltannia, “The amplitude-frequency characteristics of piezoceramic plates depending on the shape of the boundaries,” in: Proc. of 7th Int. Conf. on Acoustics and Vibration (ISAV2017, Tehran, Iran, 2017).
W. P. Mason, Piezoelectric Crystals and Their Application to Ultrasonics, Van Nostrand (1950).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Problemy Prochnosti, No. 3, pp. 14 – 26, May – June, 2018.
Rights and permissions
About this article

Cite this article
Shakeri Mobarakeh, P., Grinchenko, V.T. & Soltannia, B. Effect of Boundary Form Disturbances on the Frequency Response of Planar Vibrations of Piezoceramic Plates. Analytical Solution. Strength Mater 50, 376–386 (2018). https://doi.org/10.1007/s11223-018-9981-x
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11223-018-9981-x