
Abstract
Nonlinear dynamics of a clamped–clamped micro-beam exposed to a two sided electrostatic actuation is investigated to determine super sensitive regions for mass detection. The objective is to investigate the sensitivity of the frequency spectrum of various regions in the phase space to the added mass and force the system to operate in its super sensitive regions by applying an appropriate pulse to its control electrodes. The electrostatic actuation in the top electrode is a combination of a DC, AC and a pulse voltage, the excitation on the lower electrode is only a DC and a pulse voltage. The governing equation of the motion, derived using the Hamiltonian principle, is discretized to an equivalent single-degree of freedom system using the Galerkin method. Depending on the applied electrostatic voltage to the micro-beam, it is demonstrated that the number and types of equilibrium points of the system can be modified. In this study, the level of the DC electrostatic voltage is chosen such a way that the system has three equilibrium points including two centers and a saddle node where the homoclinic orbit originates. According to the reported results, the mass sensing sensitivity depends on the operating orbit; some orbits exhibit considerably higher mass detection sensitivity to the added mass compared to that of a typical quartz crystal micro balance instrument.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Over the past two decades, bio-sensors based on micro-cantilever beams have been extensively evaluated to address the key sensor requirements, such as a small sensor size/area, a label-free detection method, low-cost fabrication and mass production, redundancy with array operations, and compatibility with integrated circuits (ICs) fabrication. Such cantilever sensors form a platform technology developed and studied for a wide spectrum of mass sensing applications, mainly operating in two modes: (1) dynamic (resonant) and (2) static modes. Compared to typical quartz crystal micro-balance (QCM) instrument, the sensing medium is a more serious concern in the dynamic mode since, due to its out-of-plane motion, the dynamics of a cantilever beam is strongly affected by viscous damping and dissipative inertia forces, leading to noise and drift as well as other serious complications in practical sensing applications. As detailed in a recent review article [1], in spite of the extensive published literature; today several important areas in micro-sensor research remain relatively unexplored: (1) the use of high order vibrational modes with localized and optimized sensing regions, (2) application and utilization of sensor non-linearity in bio-sensing applications, (3) understanding the influence of interface vibrations on binding kinetics, (4) equilibrium, and non-specific adsorption and developing methods of in situ surface renewal for high-throughput applications, (5) design of continuous resonant frequency measurement-based sensing applications in liquids.
Recent studies have indicated that the microresonator performance metrics can be radically improved for sensing applications by exploiting inherent system nonlinearities [2–8]. Nonlinearities in resonant microsystems generally arise from three sources: (1) large (finite) structural deformations, (2) displacement-dependent excitations (stiffness parametric excitation), and (3) tip/sample interaction potentials (e.g. electrostatic interactions, and the Lennard-Jones potential). Initially, studies of nonlinear microresonators emphasized forced harmonic oscillators (e.g. planar comb-driven devices) with nonlinearities arising from large elastic deformations. These devices exhibited classical Duffing frequency response (cubic nonlinearity), which offered a number of secondary benefits (e.g., lower sensitivity to damping), but were deemed to be inferior to their linearity counterparts for most applications [9]. Due to their high tunability, nonlinear, electro-statically actuated, variable-gap structures drew slightly more attention [10–13]. Studies of nonlinear microresonators undergoing large elastic deformations under coupled-field excitations were also reported [14–17]. This shift in focus is generally attributed to the perception that, while micro-resonators based on nonlinear frequency response structures are more difficult to design and analyze than their linear counterparts, they offer a degree of tunability unattainable with a linear device. Recent publications have clearly indicated that mass sensors based on nonlinear behavior may be capable of exhibiting higher sensitivities [18–21]. A mechanical chaotic system exhibits very high sensitivity to small parametric and initial condition variations. These nonlinear devices operate similar to their linear counterparts in the sense that they utilize resonance shifts induced by a chemo-mechanical process initiated by the presence of a target analyte. However, in the nonlinear case, the bifurcation structure of the system and associated sensitivities to changes is deliberately exploited. Specifically, a given device is first driven slightly below an identified sub-critical bifurcation point. When a small amount of mass interacts with the resonator, the system transitions across the sub-critical instability, moving from a stable no-motion state to an unstable no-motion state (in the case of a nonlinear parametrically-excited resonator). As a by-product of a jump bifurcation, this transition results in larger response amplitude, which can be directly correlated to a detection event. While this approach still utilizes resonance shifts in the course of sensing process, because the detection event is directly correlated to a jump in response amplitude, in addition to a frequency shift, the need for attendant frequency tracking/identification hardware, such as phase locked loops, can potentially be eliminated. As a result, the measurement mechanism could allow for compact, reduced power, chemical and biological detectors with higher sensitivities and detection limits. Developing a nonlinear feedback excitation to force a piezoelectric cantilever into chaotic motions was considered [22]. In 2008, nonlinear vibration of a piezo-electrically driven micro-cantilever beam was reported [23], which showed the quadratic nonlinearity due to the response of the piezoelectric layer and cubic form due to beam geometry.
2 Sensor Architecture and Device Modeling
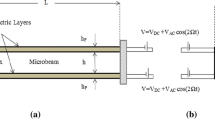
As illustrated in Fig. 1, the mechanical structure of the proposed sensor architecture is an isotropic clamped–clamped micro-beam with length of l, width of a, thickness of h, mass density of ρ, with Young’s modulus of E excited by two electrodes that are placed underneath and on top of the micro beam. Initial gap between the micro-beam and the electrodes is set g o and the applied electrostatic voltage by the upper and lower electrodes are denoted by V u and V l, respectively. V u consists of a combination of a DC voltage (V DC ), AC voltage (amplitude VAC and frequency Ω) and a square pulse with an amplitude of V up and a duration of ∆t up . V l is a combination of a DC voltage the same as the upper electrode and a hopping pulse with an amplitude of V lp and a duration of ∆t up . The coordinate system, as illustrated in Fig. 1, is attached to the middle of the left-end of the micro-beam where x and z refer to the horizontal and vertical coordinates, respectively. The dynamic deflection of the micro-beam along the z axis is denoted by w(x, t).

Schematics of the elecro-mechanical model for the proposed mass sensor architecture
As a clamped–clamped beam undergoes bending, the extended length of the beam, l ′, becomes longer than its initial length l, leading to an induction of an axial force as follows:
where l ′ is approximated, based on the integration of the arc length ds, as follows:
The governing equation of the transverse motion can be obtained by the minimization of the Hamiltonian using the Variational principle. The total potential (stain) energy of the micro-beam includes the bending and axial strain energy terms (U b , U a ) as follows:
In Eq. (3), I yy denotes the moment of inertia of the cross section about the y axis passing through the center of the surface of the cross section of the micro-beam; the first term is the strain energy due to the bending of the micro beam, the second term is the strain energy due to the axial force and the last two terms indicate the electrical potential energy stored between the micro beam and the two underneath and top substrates; ɛ 0 is the dielectric constant of the gap medium.
The kinetic energy of the micro-beam is represented as follows:
where ρ is to the mass density of the micro-beam. The Hamiltonian of the sensor structure is represented in the following form
where w el is the work of electrostatic force.
Substituting Eqs. 1 and 2 into Eq. 5, the Hamiltonian H reduces to:
Based on the fact that the variation of the integral of the Hamiltonian over the time period [0, t] vanishes, namely, \( \delta \mathop \int \limits_{0}^{t} \left( {T - U + w_{el}}\right)dt = 0 \), the governing equation of motion and the corresponding boundary conditions are obtained as:
subjected to the following boundary conditions:
The integral term in Eq. (7) represents the mid-plane stretching of the micro-beam due to the immovable edges. Nonlinearities in resonant micro-systems generally arise from three sources: (1) large (finite) structural deformations, (2) displacement-dependent excitations (stiffness parametric excitation), and (3) tip/sample interaction potentials (e.g. electrostatic interactions, and the Lennard-Jones potential) [24, 25]. According to Eq. (7), two types of nonlinearities exist in this model. As illustrated below, the nonlinearity of the dynamics of the structure adds interesting behaviors to the response of the system.
For convenience, the non-dimensional displacement, x-axis, and time (denoted by hats) are introduced as follows:
where \( \widetilde{t} \) is a time scale. Considering the control voltages V u = V DC + V AC + V up ,V l = V DC + V lp and V DC ≪ V AC , substituting Eq. (9) into Eqs. (7) and (8), and dropping the hats in the non-dimensionalized terms, the non-dimensional equation of the motion is obtained as follows:
where the following boundary conditions hold:
The non-dimensional parameters in Eq. (10) are obtained as:
Expanding the electrostatic force due to the DC voltage into a Taylor series up to fourth order and dropping the higher order terms becomes:
Substituting Eq. (13) into Eq. (10) results in the simplified equation of the motion in the non-dimensional form:
3 Analysis of the Dynamics of the System
Applying the separation of variables method, the approximate solutions of Eq. (14) is represented as [26, 27]:
Introducing Eq. (15) into Eq. (14) leads to:
where Re(x, t) is the residual function. Since the response of the system is approximated, so the right-hand side of Eq. (16) will not vanish, but equal to a residual. Using the Galerkin method, both sides of Eq. (16) is multiplied by the shape function φ r (x) and integrated over the non-dimensional length. The orthogonally of the residual to the shape function implies the result of integration to be zero:
Equation (16) can be represented in the following discretized form:
where M ir , K ir , K jpir , and F 0 are the mass, linear stiffness, nonlinear stiffness and force matrices defined as:
Considering the first eigenfunction of a clamped–clamped micro-beam in the response of the system, the governing equivalent single-degree of freedom system will be in the following form:
Equation (19) is in the form of a forced duffing equation. The phase space variables are introduced as:
Equation (19) reduces to:
If the amplitude of the AC voltage is set to zero, the equilibrium points of the system and their types depend on the linear and nonlinear stiffness terms (coefficients of \( S_{1} \), \( S_{1}^{3} \)).
The equilibrium points for zero V AC are obtained as follows:
For V DC = 5.5 V, the system has three equilibrium points. Based on the eigenvalues of the Jacobian matrix, the equilibrium points include two centers and one saddle node.
With the system parameters given in Table 1, the single-degree of freedom system has three equilibrium points including a saddle node and two center points in either sides of the saddle node (Fig. 2).

Various orbits on the phase plane, S 1 versus S 2 where \( S_{1} = q(t)\,\,,\,\,S_{2} = \dot{q}(t) \)
Depended on the region of the phase space, the system vibrates, the frequency response of the system includes different frequency contents; this is due to the non-linearity of the dynamics of the motion of the system. The aim of this study is to investigate the sensitivity of the frequency contents of the various regions of the phase space to the added mass so that to investigate the super sensitive orbits or regions in the phase space. Once a super sensitive orbit is determined, the actuation pulse needed to force the system to be put in that region is investigated. In Table 2, the results of sensitivity analysis for each individual orbit on the phase plane, and the first two dominant frequency contents in the spectral response of the system are included.
For each orbit, the sensitivity of the frequency contents of the spectral response to the added mass are calculated. To make the system hop to each of the orbits depicted in Fig. 2, we need to apply appropriate pulses with appropriate amplitude and duration with upper and lower electrodes.
The properties of the hopping pulses corresponding to each orbit are given in Table 3. \( \varDelta t_{up} (\mu s) \), \( \varDelta t_{lp} (\mu s) \), t s up (μs) and t s lp (μs) correspond to the durations and the delay times of the upper and lower pulses, respectively.
4 Results and Discussions
The dynamics of a nonlinear micro-beam-based mass sensor is studied. The differential equation of the motion is derived using Hamiltonian principle and discretized to a single degree of freedom system using Galerkin method. It is seen that in the phase space of the system there are some orbits whose frequency response sensitivity to added mass are considerably higher than those of the other orbits. Figure 2 depicts various orbits in the phase plane. The system initially is in the saddle node exposed to the DC and AC voltages. Applying the pulses from the upper and lower voltage to the micro-beam based on the pulse characteristics included in Table 3, the mid point of the micro-beam hops to the corresponding orbit of the applied pulses. According to the results given in Table 2, Orbits 2, 3, 5 and 9 are super sensitive to the added mass. If the sensor is operating on these orbits, the sensitivity of the sensor are calculated to be 0.35 (ng/cm2) corresponding to a frequency shift of 0.13 Hz. A typical desktop QCM instrument provides a mass sensitivity of 1.8 ng/cm2 at a frequency shift of 0.1 Hz while the frequency detection resolution of a research-grade QCM can be as low as 0.01 Hz. The sensing mechanism proposed in this work has the potential of offering one order of magnitude higher mass sensing resolution than the QCM technology. Figure 3a–f depict the temporal responses corresponding to the hopping to each individual orbit.


Temporal response of the sensor structure exposed to V AC = 1 mV, V DC = 5.5 V and hopping pulses corresponding to a O1 and O2. b O3 and O4. c O5 and O6. d O7 and O8. e O9 and O10. f O11, O12 and O13
5 Conclusion
The proposed model is a fully clamped micro-beam exposed to a two side electrostatic actuation. The upper electrode imposes a combination of a DC/AC and a square pulse hopping voltage whereas the lower electrode imposes a combination of a DC and a square hopping voltage. The hopping square pulses are imposed so that the micro-beam is imposed to hop to the corresponding orbit. The results of sensitivity analysis showed that there are some super sensitive orbits on which the sensitivity of the structure to the added mass is 0.35 (ng/cm2) corresponding to a frequency shift of 0.13 Hz; The sensing mechanism proposed in this work has the potential of offering one order of magnitude higher mass sensing resolution than the QCM technology.
References
Johnson, B. N., & Mutharasan, R. (2012). Bio-sensing using dynamic-mode cantilever sensors: A review. Biosensors & Bioelectronics, 32, 1–18.
Younis, M. I., & Nayfeh, A. H. (2003). A study of the nonlinear response of a resonant microbeam to an electric actuation. Nonlinear Dynamics, 31–1, 91–117.
Legtenberg, R., & Tilmans, H. A. C. (1994). Electrostatically driven vacuum encapsulated polysilicon resonators. Part I: Design and fabrication, Sensors and Actuators A: Physical, 45(1), 57–66.
Napoli, M., Baskaran, R., Turner, K., & Bamieh, B. (2003). Understanding mechanical domain parametric resonance in microcantilevers, Proceedings of MEMS, The IEEE 16th annual international conference on micro electro mechanical systems, (Kyoto, Japan) 169–172.
Han, Q., Wang, J., & Li, Q. (2011). Parametric instability of a cantilever beam subjected to two electromagnetic excitations: Experiments and analytical validation. Journal of Sound and Vibration, 330(14), 3473.
Abdel-Rahman, E. M., Younis, M. I., & Nayfeh, A. H. (2002). Characterization of the mechanical behavior of an electrically actuated microbeam. Journal of Micromechanics and icroengineering, 12–6, 759.
Napoli, M., Bamieh, B., & Turner, K. (2004). A capacitive microcantilever: Modelling, validation, and estimation using current measurements. Journal of Dynamic Systems, Measurement, and Control, 126, 319.
Younis, M. I., Abdel-Rahman, E. M., & Nayfeh, A. (2003). A reduced-order model for electrically actuated microbeam-based MEMS. Journal of Microelectromechanical Systems, 12–5, 672–680.
Nguyen, C. T. C., Howe, R. T. (1993). CMOS micromechanical resonator oscillator, electron in proceedings of the IEEE international devices meeting, (Washington, D. C.) 199–202.
Younis, M. I., & Nayfeh, A. H. (2003). A study of the nonlinear response of a resonant microbeam to an electric actuation. Nonlinear Dynamics, 31(1), 91–117.
Abdel-Rahman, E. M., & Nayfeh, A. H. (2003). Secondary resonances of electrically actuated resonant microsensors. Journal of Micromechanics and Microengineering, 13(3), 491–501.
Kozinsky, I., Postma, H. W. C., Bargatin, I., & Roukes, M. L. (2006). Tuning nonlinearity, dynamic range, and frequency of nanomechanical resonators. Applied Physics Letters, 88, 253101.
Legtenberg, R., & Tilmans, H. A. C. (1994). Electrostatically driven vaccum encapsulated polysilicon resonators. Part I: Design and fabrication, Sensors and Actuators A: Physical, 45(1), 67.
De, S. K., & Aluru, N. R. (2005). Complex oscillations and chaos in electrostatic microelectromechanical systems under superharmonic excitations. Physical Review Letters, 94, 204101.
Kaajakari, V., Mattila, T., Oja, A., & Seppa, H. (2004). Nonlinear limits for single crystal silicon microresonators. Journal of Microelectromechanical Systems, 13(5), 715–724.
Li, H., Preidikman, S., Balachandran, B., & Mote, C. D. (2006). Nonlinear free and forced oscillations of piezoelectric microresonators. Journal of Micromechanics and Microengineering, 16–2, 356–367.
Zaitsev, S., Almog, R., Shtempluck, O., & Buks, E. (2005). Nonlinear dynamics in nanomechanical oscillators, in Proceedings of ICMENS’05: The 2005 international conference on MEMS, NANO, and smart systems, (Banff, Alberta, Canada), vol. 130, pp. 387–391.
Zhang, W., & Turner, K. L. (2005). Application of parametric resonance amplification in a single-crystal silicon micro-oscillator based mass sensor. Sensors and Actuators, A: Physical, 122–1, 23–30.
Zhang, W., Baskaran, R., & Turner, K. L. (2002). Nonlinear dynamics analysis of a parametrically resonant MEMS sensor, in proceedings of the 2002 SEM annual conference and exposition on experimental and applied mechanics, (Milwaukee, Wisconsin).
Requa, M. V., & Turner, K. L. (2007). Precise frequency estimation in a microelectromechanical parametric resonator. Applied Physics Letters, 90, 173508.
Requa, M. V., & Turner, K. L. (2006). Electromechanically driven and sensed parametric resonance in silicon microcantilevers. Applied Physics Letters, 88, 263508.
Liu, S., Davidson, A., & Lin, Q. (2004). Simulation studies on nonlinear dynamics and chaos in a MEMS cantilever control system. Journal of Micromechanics and Microengineering, 14(7), 1064.
Mahmoodi, S. N., Afshari, M., & Jalili, N. (2008). Nonlinear vibrations of piezoelectric microcantilevers for biologically induced surface stress sensing. Communications in Nonlinear Science and Numerical Simulation, 13, 1964.
Azizi, S., Ghazavi, M. R., Esmaeilzadeh Khadem, S., Rezazadeh, G., & Cetinkaya, C. (2013). Application of piezoelectric actuation to regularize the chaotic response of an electrostatically actuated micro-beam. Nonlinear Dynamics, 73(1–2), 853–867.
Azizi, S., Ghazavi, M., Rezazadeh, G., Ahmadian, I., & Cetinkaya, C. (2014). Tuning the primary resonances of a micro resonator, using piezoelectric actuation. Nonlinear Dynamics, 76(1), 839–852.
Ghazavi, M.-R., Rezazadeh, G., & Azizi, S. (2010). Pure parametric excitation of a micro cantilever beam actuated by piezoelectric layers. Applied Mathematical Modelling, 34(12), 4196–4207.
Azizi, S., Rezazadeh, G., Ghazavi, M.-R., & Khadem, S. E. (2012). Parametric excitation of a piezoelectrically actuated system near Hopf bifurcation. Applied Mathematical Modelling, 36(4), 1529–1549.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Azizi, S., Ahmadian, I., Cetinkaya, C. et al. Super Sensitive Mass Detection in Nonlinear Regime. Sens Imaging 16, 5 (2015). https://doi.org/10.1007/s11220-015-0108-1
Received:
Revised:
Published:
DOI: https://doi.org/10.1007/s11220-015-0108-1