
Abstract
In this paper, We have developed a variety of new approximate solutions for the nonlinear fractional generalized Pochhammer-Chree equation (FGPCEs) using the fractional homotopy perturbation transform method via the Caputo-Fabrizio fractional derivative(CFFD) of order \(\alpha \) where \(\alpha \in (1, 2].\) via Laplace transform technique.we investigate all concerned wave models that have been used in the examination for the propagation of harmonic waves in a cylindrical rod and several problems in fluid mechanics and wave theory in physics. Banach’s fixed point hypothesis is tested for governing the fractional-order model in order to establish the existence and uniqueness of the achieved solution. We considered the model in terms of arbitrary order with three cases and introduced corresponding numerical simulations to demonstrate and validate the effectiveness of the proposed algorithm. By assigning appropriate values to free parameters, dynamical wave structures of some approximate solutions are graphically demonstrated using 2D and 3D Fig. This method can also be used to approximate the solutions of other well-known equations in engineering physics, quantum field, and other applied sciences. Furthermore, various simulations are used to demonstrate the physical behaviors of the acquired solution with respect to fractional integer order.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear fractional differential equations(NFDEs) are mathematical equations that involve derivatives of fractional order. They combine the concepts of nonlinearity and fractional calculus, which extends the classical integer-order calculus to non-integer orders.
where \(D^{\alpha }\) is the fractional derivative operator of order \(\alpha , u(t)\) represents the unknown function, \(f(t, u(t), D^{\beta } u(t))\) is a nonlinear function of t, y(t), and the fractional derivative \(D^{\beta } u(t)\) of order \(\beta \) is taken with respect to t. Because fractional derivatives introduce memory effects into the system, the state of the system at any given time depends on both its recent history and its current inputs. Due to the nonlinear nature of the equations, solving nonlinear fractional differential equations is typically more difficult than solving linear fractional differential equations. To solve these equations, a number of numerical and analytical techniques have been developed, including the Laplace transform, the Adomian decomposition method, and the variational iteration method. Numerical techniques include finite difference methods, numerical approximation schemes, and spectral methods (Caputo 1969; Miller and Ross 1993; Clarkson et al. 1986; Saxton 1985; Prakash et al. 2021; Yan et al. 2022; WuFulai and Deng 2020; Baleanu et al. 2017; Veeresha et al. 2022; Akinyemi et al. 2022; Li et al. 2002; Gao et al. 2022; Seadawy et al. 2021; Renu et al. 2021; Zhang and Ma 1999; Kala et al. 2019; Li and Zhang 2002; Yan et al. 2021; Toprakseven 2021; Al-Smadi et al. 2021). Applications for nonlinear fractional differential equations can be found in a number of disciplines, such as physics, engineering, biology, finance, and control theory, where complex dynamics and memory effects are present but not well captured by integer-order models (Ali 2021; Wazwaz 2008; Mohebbi 2012; Hawagfeh and Kaya 2004; kumar et al. 2022; Achab 2019). The nonlinear fractional generalized Pochhammer-Chree equation is a mathematical equation that combines elements of nonlinear dynamics, fractional calculus, and the Pochhammer-Chree equation. It explains the behavior of specific physical phenomena or systems where nonlinearity and fractional order derivatives are important factors. Through the use of the homotopy perturbation transform method and the propagation of longitudinal deformation waves in an elastic rod, this paper aims to investigate new approximation solutions to the generalized Pochhammer-Chree equation (Seadawy et al. 2021).
where \(\mu (u)\) is a rational function of u. Eq. (1) describes how a longitudinal deformation wave moves through an elastic rod. for \(\mu (u)= u^q\) for the value \(q= 2, 3, 5\) respectively (Runzhang and Yacheng 2010), and numerically examined how two single wave solutions interacted.
Runzhang and Yacheng (2010). I have offered some explicit solitary wave solutions to (1) using the method for solving algebraic equations.
In this work, we take into account the generalized PC equation.
In this equation \(\beta _1,~ \beta _2,\) and \(\beta _3\) are arbitrary constant and \(q>0\).
Let’Considering the nonlinear fractional PC Equation
where \(u= u(x, t)\) is the unknown functions x and \(t, u_t\) is the partial derivative of u with respect to \(t, u_x \) is the partial derivative of u with respect to x. The equation also involves fractional differentiation, represented by the Caputo-Fabrizio-fractional derivative operator \(^{CF}_0\;D^{\alpha }\) with \(\alpha \in (1, 2)\). The parameters \(\beta _2\) and \(\beta _3\) represent coefficients of nonlinear terms in the equation. The solution to this equation depends on the initial and boundary conditions specified for u(x, t) (Akinyemi et al. 2022; Li et al. 2002; Seadawy et al. 2021; Zhang and Ma 1999; Li and Zhang 2002; Wazwaz 2008; Mohebbi 2012), 224, Achab (2019); Ali et al. (2020); Runzhang and Yacheng (2010).
In general, it can be difficult to solve fractional partial differential equations analytically, so solutions are frequently approximated using numerical techniques. Different numerical techniques, such as finite difference methods, finite element methods, or spectral methods, may be used to solve the equation depending on the particular problem and circumstances (Baskonus et al. 2022; Veeresha et al. 2022, 2019; Chen et al. 2022; Veeresha 2021; Maraaba et al. 2008). In the areas of mathematical modeling and applied sciences, research on the nonlinear fractional generalized Pochhammer-Chree equation is highly relevant. It has uses in many different physical phenomena and can be used to comprehend complex dynamics that appear in a variety of systems, from fluid mechanics to nonlinear optics. Insights into the behavior of the solution are provided by numerical simulations and analysis of this equation, which also advance scientific understanding of fractional calculus and nonlinear dynamics (Prakash and Kaur 2022; Ciancio et al. 2022; Baskonus et al. 2022; He 1999; Veeresha et al. 2022). Nonlinear Partial differential equation research has important applications in many fields of science and engineering and plays a fundamental role in understanding and modeling complex systems (Malik et al. 2023; Asjad et al. 2023; Iyanda et al. 2023; Asghari et al. 2023a). To study the nonlinear partial differential equation (NLPDE) and its variations, researchers used fractional calculus (Asghari et al. 2023b; Akinyemi et al. 2021; Veeresha 2022; Deepika and Veeresha 2023; Ramapura et al. 2022; Lanre et al. 20222; Wei et al. 2022; Esin et al. 2021).
In this present study: In Sect. 2 the Preliminaries. In Sect. 3 depicts a thorough explanation of the suggested method and the model’s solutions. In Sect. 4 Analysis of the Existence and Uniqueness solution of the model. In Sect. 5 a few numerical examples. In Sect. 6 is devoted to graphs and their graphical representation of them. at the end. In sect. 7 gives the conclusion’s specifics.
2 Preliminaries
This section contains the detailed the used Laplace transform (LT), fractional differentiation (RD), and Riemann-Liouville (R-L) fractional differentiation are presented along with some basic definitions (Yan et al. 2022; Veeresha et al. 2022; Akinyemi et al. 2022; Li et al. 2002).
Definition 2.1
For \(\alpha >0\) left (R-L) order fractional integral of \(\alpha \) is defined as below (Wei et al. 2022; Esin et al. 2021).
Definition 2.2
For \(0<\alpha <1\) left (R-L) order fractional integral of \(\alpha \) is given as Esin et al. (2021).
Definition 2.3
For Caputo fractional derivative is define for \(\alpha \ge 0\) & \(n\in N\cup {0}\) is define as follows Esin et al. (2021).
Definition 2.4
Consider u be a function \(u \in H^1(a_1,b_1),~ b_1>0,~0<\alpha <1.\) The fractional caputo-fabrizio factional operator is define as below (Esin et al. 2021).
with a normalize functions \(\lambda (\alpha )\) which is depend on \(\alpha \in \lambda (0)= \lambda (1)=1.\)
Definition 2.5
For CFD for integer order of \( 0<\alpha <1\). is given by Esin et al. (2021).
Definition 2.6
Laplace transform (LT) for the (CFD) of order \( 0<\alpha <1.\) and \(m\in N\) is given by Esin et al. (2021).
we have, In particular
3 Methodology
Let’s consider the following NPDEs via the Caputo-Fabrizio derivative:
for the initial conditions
When we apply the Laplace transform’s derivative rule to equation Eqs. (11–12), we get
here
Utilizing the inverse Laplace transform on Eq. (13), we yield’s
as a result of an infinite series
or nonlinear term is decomposable like
\(H_n\) are He’s polynomials that can be evaluated using the formula below (He 1999).
For the Eqs. (16–17) into Eq. (15), we obtained
We obtained following approximations by equating the terms with similar powers in p in Eq. (19)
Finally, we derive the semi-analytic answer as a truncated series of approximations as
4 Analysis of existence and uniqueness for fractional generalized Pochhammer-Chree equation
In this section, We demonstrate the existence and uniqueness of the fractional GPC equation using a new CFD that lacks a singular kernel (Ali 2021).
Let’s consider the fractional generalized Pochhammer-Chree equation as:
Eq. (21) is written as follows:
Now, Eq. (22) is transformed into the Volterra integral equation as follows:
4.1 Theorem
ref. Ali (2021) \(\Theta (x, t, u, \beta _1, \beta _2, \beta _3, p)\) If the following inequality exists, satisfy the Lipschitz condition and it is contractions.
where
Proof
Let’s as u & v consist of two bounded functions. Using triangular inequality and Eq. (25). we determine
since, u and v are positive, bounded, and constant \(\eta _1, \eta _2 >0\) s.t for all \((x, t), \Vert u\Vert \le \eta _1\) and \(\Vert v\Vert \le \eta _2\).
Let \(\eta = max\{\eta _1, \eta _2 \}.\) The Lipschitz condition is met for the first order partial derivative function, \(\partial _x\) &. there is a number \(Q_1, Q_2\ge 0\) s.t
Taking \(Q= Q^4_1 + Q^2_2 (\beta _1+ \beta _2 p \eta ^{p-1}+ \beta _3 p\eta ^{2p-2}) \), we get
Hence, \(\Theta (x, t, u, \beta _1, \beta _2, \beta _3, p)\) satisfies the Lipschitz condition, and if \(0< Q \le 1\), then the theorem is established because it is a contraction.
Now, the main outcome can be stated. \(\square \)
4.2 Theorem
The following bet is provided
for, Eq. (4) the initial condition for the fractional generalised Pochhammer-Chree equation admits to the uniqueness and continuous solutions.
Proof
We take into consideration Eq. (23), using the expression (25).
which implies the recurrence equation,
Let
Now we will demonstrate that the continuous \({\widetilde{u}}(x, t)= u(x, t)\) solutions.
It is clear that
Additionally, in a very thorough manner, we have
Using the triangular inequality and the norm on both sides of Eq. (36) we obtain
applying Theorem 4.1 results
which is comparable to
Applying the recursive principle to Eq. (39), we obtain
Shows that the problem has a solution and is being worked on.
It proves that
If Eq. (4) has solutions, then let’s
Therefore, according to Eq. (35),the difference \(\Re _n(x, t)\) between \({\widetilde{u}}(x, t)\) and \(u_n(x, t)\) should tend to zero. as \(n\longrightarrow \infty \), as follows
We obtain this using Theorem 4.1
therefore, when \(n\longrightarrow \infty \) ,then \(\Re _n\longrightarrow 0\) and the RHS provides
With the information above, we can use the equation \(u(x, t)= {\widetilde{u}}(x, t) \) as a solution to the continuous than Eq. (4)
Consequently, when we apply the Lipschitz condition to \(\Theta \), we get
Considering the initial condition and the limit when \(n\longrightarrow \infty \), we obtain
Finally, we consider u and v to be two different solutions to Eq. (4) in order to ensure uniqueness. The Lipschitz condition for \(\Theta \) then yields.
This results in
Therefore, \( \Vert u(x,t)- v(x,t) \Vert =0\) if
Hence proved. \(\square \)
5 Numerical Examples
Example 5.1
Consider the following Eq. (4) at \(\beta _1 \ne 0,~ \beta _2 \ne 0\) and \(\beta _3=0\) Then, we have
than the initial conditions
With the aid of the anticipated algorithm, we have
here
The first few components of a homotopy polynomial are written as
The result of comparing the coefficients of similar powers of p is
By carrying on in this manner, we can obtain the final element of the iteration formulas.
Consequently, the approximate answer is
Example 5.2
Consider Eq. (4) at \(\beta _1 \ne 0,~ \beta _2=0\) and \(\beta _3 \ne 0\) Then, we have
than the initial conditions
With the aid of the anticipated algorithm, we have
here
The first few components of a homotopy polynomial are written as
The result of comparing the coefficients of similar powers of p is
By carrying on in this manner, we can obtain the final element of the iteration formulas.
Consequently, the approximate answer is
Example 5.3
Consider Eq. (4) at \(\beta _1 \ne 0,~ \beta _2 \ne 0\) and \(\beta _3 \ne 0\) Then, we have
than the initial conditions
With the aid of the anticipated algorithm, we have
here
The first few components of a homotopy polynomial are written as
The result of comparing the coefficients of similar powers of p is
By carrying on in this manner, we can obtain the final element of the iteration formulas (Tables 1, 2 and 3).
Consequently, the approximate answer is

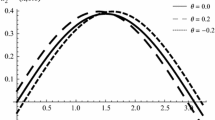
(a) Plots of u(x, t) with respect to x for varying \(\alpha \), for Ex 5.1; and (b) exact solutions for Ex. 5.1

The combined dark-bright soliton solution of u(x, t) in Ex.1

(a) Plots of u(x, t) with respect to x for varying \(\alpha \), for Ex 5.2; and (b) exact solutions for Ex. 5.2

The rational function solution of u(x, t) in Ex.5.2

(a) Plots of u(x, t) with respect to x for varying \(\alpha \), for Ex 5.3; and (b) exact solutions for Ex. 5.3

The dynamic behavior of 3D plot of u(x, t) solution in Ex.5.3
6 Result and discussion
In this section, to analyze the solutions, we make use of graphical representations. We talk about the generalised Pochhammer-Chree equation with nonlinear fractions. For each of the solutions, a graph was made and a description of it was given. We ran some numerical calculations in Mathematica to demonstrate the dynamical behavior of the model and test the viability of our analysis regarding the existence of interior equilibrium and the corresponding initial conditions. we will display the graphical analysis of the model under consideration in this section. Fig. 1a the 2D graph fractional order of derivative value \(\alpha \) where \((\alpha = 1.25,~ 1.5,~ 1.75,~ 2),~ \beta _ 1= 1.5,~ \beta _2= 1\) and \(x=2,~~0\le t\le -5\).
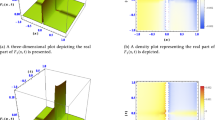
(b) the display 3D analysis of the exact solutions u(x, t) with parametric value \(\beta _1= -1.5,~\beta _2= 1\) and \(-60\le x\le 75,~ -60\le t\le 75\).
Figure 2a–d the display 3D graph to show the dynamical behavior of fractional order to of \(\alpha \) Ex.5.1. Figure 3a the 2D graph fractional order of derivative value \(\alpha \) where \((\alpha = 1.25,~ 1.5,~ 1.75,~ 2),~ \beta _ 1= 1.5,~ \beta _3= -0.5\) and \(x=1,~\lambda =1~~0\le t\le 2\).
(b) the display 3D analysis of the exact solutions u(x, t) with parametric value \(\beta _1= -1.5,~\beta _3= -0.5\), & \(\phi = 1\) and \(-15\le x\le 15,~ -15\le t\le 15\). Figure 4a–d the display 3D graph to show the dynamical behavior of fractional order to of \(\alpha \) Ex.5.2.
Figure 5a the 2D graph fractional order of derivative value \(\alpha \) where \((\alpha = 1.25,~ 1.5,~ 1.75,~ 2),~\beta _ 1= 1.5,~ \beta _2= 1,~\beta _3= -0.1\) and \(x=8,~~0\le t\le 1\).
(b) the display 3D analysis of the exact solutions u(x, t) with parametric value \(\beta _1= 1.5,~\beta _2= 1,~\beta _3= -0.1\) and \(-10\le x\le 15,~ -10\le t\le 15\).
Figure 6a–d the display 3D graph to show the dynamical behavior of fractional order to of \(\alpha \) Ex.5.3. It is apparent form these figures that as the value of \(\alpha \) increases, respectively. The technique employed is an effective mathematical tool for finding various types of solutions to numerous NGPCEs.
7 Conclusions
In this paper, We have developed a variety of new approximate solutions for the FGPC Eq. (4) using symbolic computation and the fractional homotopy perturbation transform method via the Caputo-Fabrizio fractional derivative(CFFD) of order \(\alpha \) where \(\alpha \in (1, 2].\) The FHATM provides a simple description for adjusting and controlling the convergence of the series solution by selecting appropriate auxiliary parameter \(\alpha \). We continued our research in Prakash et al. (2021); Toprakseven (2021), where we stated the existence and uniqueness results for fractional initial value problems of the form Eq. (4) with different three initial condition Eq. (4) and potential applications such as Fractional calculus enrichment, Nonlinearity, and soliton solutions, Numerical simulations, Applications in physics and beyond and Future research directions. There are a number of directions for additional research, even though we have made significant progress in comprehending the properties of the equation. Future research could focus on examining the stability of solitons, multi-dimensional extensions of the equation, and the effects of additional nonlinear terms. It should be noted that the proposed method could also be used to solve nonlinear GPCEs fractional differential equations involving the CFD of order \(\alpha \in (1, 2]\) , such as the FHPTM (He 1999). It is possible to conclude that the FHATM is simple to use and effective at finding approximate solutions to many fractional physical problems that arise in various fields of science and engineering. Furthermore, 2D and 3D graphs of some solutions were presented to demonstrate the physical characteristics of the acquired solutions. Additionally, real-world applications and experimental validation of the equation’s predictions can provide valuable insights.
Availability of data and material
All data are included in the paper
References
Achab, A.E.: On the integrability of the generalized Pochhammer-Chree (PC) equations. Phy. A. Stat. Mech. Appl. 545(1), 1–16 (2019)
Akinyemi, L., Veeresha, P., Ajibola, S.O.: Numerical simulation for coupled nonlinear Schrödinger-Korteweg-de Vries and Maccari systems of equations. Modern Physics Letters B 35(20), 2150339 (2021)
Akinyemi, L., Veeresha, P., Senol, M., Rezazadeh, H.: An efficient technique for generalized conformable Pochhammer-Chree models of longitudinal wave propagation of elastic rod. Ind. J. Phy. 1-10, (2022)
Ali, K.: The Existence and Uniqueness of Solution for Fractional Newell-Whitehead-Segel Equation Within Caputo-Fabrizio Fractional Operator. Appl. Appl. Math. 16(2), 894–909 (2021)
Ali, A., Seadawy, A.R., Dumitru, B.: Propagation of harmonic waves in a cylindrical rod via generalized Pochhammer-Chree dynamical wave equation. Res. Phy. 17, 1–7 (2020)
Al-Smadi, M., Djeddi, N., Momani, S., Al-Omari, S., Araci, S.: An attractive numerical algorithm for solving nonlinear Caputo-Fabrizio fractional Abel differential equation in a Hilbert space. Adv. Diff. Equ. 271, 1–18 (2021)
Asghari, Y., Eslami, M., Rezazadeh, H.: Soliton solutions for the time- fractional nonlinear differential-difference equation with conformable derivatives in the ferroelectric materials. Opt Quant Electron 55, 289 (2023)
Asghari, Y., Eslami, M., Rezazadeh, H.: Exact solutions to the conformable time-fractional discretized mKdv lattice system using the fractional transformation method. Opt Quant Electron 55, 318 (2023)
Asjad, M.I., Inc, M., Faridi, W.A., et al.: Optical solitonic structures with singular and non-singular kernel for a nonlinear fractional model in quantum mechanics. Opt Quant Electron 55, 219 (2023)
Baleanu, D., Mousalou, A., Rezapour, S.: On the existence of solutions for some infinite coefficient-symmetric caputo-fabrizio fractional integro-differential equations. Bound Value Prob 1, 145–53 (2017)
Baskonus, H.M., Mahmud, A.A., Muhamad, K.A., Tanriverdi, T.: A study on Caudrey-Dodd-Gibbon-Sawada-Kotera partial differential equation. Math. Meth. Appl. Sci. (2022). https://doi.org/10.1002/mma.8259
Baskonus, H. M., Senel, M., Kumar, A., Yel, G., Senel, B., Gao, W.: On the Wave Properties of the Conformable Generalized Bogoyavlensky-Konopelchenko Equation. Hand. Fract. Cal. Eng. Sci. 103-119 ( 2022)
Caputo, M.: Elasticita Dissipazione. Zani-Chelli (1969)
Chen, Q., Baskonus, H.M., Gao, W., Ilhan, E.: Soliton theory and modulation instability analysis: The Ivancevic option pricing model in economy. Alex. Eng. J. 61(10), 7843–7851 (2022)
Ciancio, A., Yel, G., Yel, Kumar, A., Baskonus, H.M.: On the complex mixed dark-bright wave distributions to some conformable nonlinear integrable models. Fract 30(1), 2240018 (2022)
Clarkson, P.A., LeVeque, R.J., Saxton, R.: Solitary wave interactions in elastic rods. Stud. Appl. Math. 75, 95–122 (1986)
Deepika, S., Veeresha, P.: Dynamics of chaotic waterwheel model with the asymmetric flow within the frame of Caputo fractional operator. Chaos, Solitons & Fractals 169, 113298 (2023)
Esin, I., Veeresha, P., Haci, M.B.: Fractional approach for a mathematical model of atmospheric dynamics of CO2 gas with an efficient method. Chaos, Solitons & Fractals 152, 111347 (2021)
Gao, W., Veeresha, P., Prakasha, D.G., Baskonus, H.M.: Regarding new numerical results for the dynamical model of romantic relationships with fractional derivative. Fract. 30(1), 1–11 (2022)
Hawagfeh, N.S., Kaya, D.: Series Solution to the Pochhammer-Chree Equation and Comparison with Exact Solutions. Comput. Math. Appl. 47, 1915–1920 (2004)
He, J.H.: Homotopy perturbation technique. Comput. Meth. Appl. Mech. Eng. 178(3–4), 257–262 (1999)
Iyanda, Falade Kazeem, Rezazadeh, Hadi, Inc, Mustafa, Akguul, Ali, Bashiru, Ibrahim Mujitaba, Hafeez, Muhammad Bilal, Krawczuk, Marek: Numerical simulation of temperature distribution of heat flow on reservoir tanks connected in a series. Alexandria Engineering Journal 66, 785–795 (2023)
Kala, B.S., Rawat, M.S., Kumar, A.: Numerical analysis of non-Darcy MHD flow of a Carreau fluid over an exponentially stretching/shrinking sheet in a porous medium. Int. J. Sci. Res. Math. Stat. Sci. 6(2), 295–303 (2019)
kumar, A., Prakash, A., Baskonus, H. M.: The epidemic COVID-19 model via Caputo-Fabrizio fractional operator. Wav. Ran. Comp. Med. 1-15 (2022). https://doi.org/10.1080/17455030.2022.2075954
Lanre, A., Udoh, A., Pundikal, V.: Hadi Rezazadehd, Mustafa Inc Computational techniques to study the dynamics of generalized unstable nonlinear Schrödinger equation, Journal of Ocean Engineering and Science x(x), 1-10 (2022)
Li, J., Zhang, L.: Bifurcation of traveling wave solution of the generalized Pochhammer-Chree (PC) equation. Chaos Soliton. Fract. 14, 581–93 (2002)
Li, B., Chen, Y., Zhang, H.: Travelling Wave Solutionsfor Generalized Pochhammer-Chree Equations. Zeit. fur. Natu. sch. A 57(a), 874–882 (2002)
Malik, S., Hashemi, M.S., Kumar, S., et al.: Application of new Kudryashov method to various nonlinear partial differential equations. Opt Quant Electron 55, 8 (2023)
Maraaba, T.A., Jarad, F., Baleanu, D.: Sci. China. Ser. A. Math. 51(10), 1775–1786 (2008)
Miller, K.S., Ross, B.: An introduction to fractional calculus and fractional differential equations. A Wiley, New York (1993)
Mohebbi, A.: Solitary wave solutions of the nonlinear generalized Pochhammer-Chree and regularized long wave equations. Nonl. Dyn 70, 2463–2474 (2012)
Prakash, A., Kaur, H.: Numerical simulation of coupled fractional-order Whitham-Broer-Kaup equations arising in shallow water with Atangana-Baleanu derivative. Math. Meth. Appl. Sci. 1-20 (2022)
Prakash, A., Kumar, A., Baskonus, H.M., Kumar, A.: Numerical analysis of nonlinear fractional Klein-Fock-Gordon equation arising in quantum field theory via Caputo-Fabrizio fractional operator. Math. Sci. 15, 269 (2021)
Ramapura, N., Premakumari, Chandrali, B., Veeresha, P., Lanre, A.: A Fractional Atmospheric Circulation System under the Influence of a Sliding Mode Controller. Symmetry 14, 2618 (2022)
Renu, K., Kumar, A. , Kumar, A., Kumar, J.: Effect Of Transverse Hydromagnetic And Media Permeability On Mixed Convective Flow In A Channel Filled By Porous Medium. Spec. Top. Rev. Por. Med. I. J. x(x), 1-23 (2021)
Runzhang, X., Yacheng, L.: Global existence and blow-up of solutions for generalized Pochhammer-Chree equations. Acta. Math. Sci. 30(5), 1793–1807 (2010)
Saxton, R.: Existence of solutions for a finite nonlinearly hyperelastic rod. J. Math. Anal. Appl 105, 59–75 (1985)
Seadawy, A.R., Rehman, S.U., Younis, M., Rizvi, S.T.R., Althobaiti, S., Makhlou, M.M.: Modulation instability analysis and longitudinal wave propagation in an elastic cylindrical rod modelled with Pochhammer-Chree equation. Phys. Scr. 96, 1–15 (2021)
Toprakseven, S.: The Existence and Uniqueness of Initial-Boundary Value Problems of the Fractional Caputo-Fabrizio Differential Equations. Univ. J. Math. Appl. 2(2), 100–106 (2021)
Veeresha, P.: A numerical approach to the coupled atmospheric ocean model using a fractional operator. Math. Model. Nume. Simul. Appl. 1(1), 1–10 (2021)
Veeresha, P.: The efficient fractional order based approach to analyze chemical reaction associated with pattern formation. Chaos, Solitons & Fractals 165(2), 112862 (2022)
Veeresha, P., Prakasha, D.G., Baleanu, D.: An efficient numerical technique for the nonlinear fractional Kolmogorov-Petrovskii-Piskunov equation. Mathhematics. 7(2), 1–17 (2019)
Veeresha, P., Malagi, N.S., Prakasha, D.G., Baskonus, H.M.: An efficient technique to analyze the fractional model of vector-borne diseases. Phy. Scr. 97(5), 054004 (2022)
Veeresha, P., Prakasha, D.G., Ravichandran, C., Akinyemi, L., Nisar, K.S.: A numerical approach to study generalised coupled fractional Ramani equations. I. J. Mod. Phy. B. 36(5), 2250047 (2022)
Veeresha, P., Ilhan, E., Prakasha, D.G., Baskonus, H.M., Gao, W.: A new numerical investigation of fractional order susceptible-infected-recovered epidemic model of childhood disease. Alex. Eng. J. 61(2), 1747–1756 (2022)
Wazwaz, A.M.: The tanh-coth and the sine-cosine methods for kinks, solitons, and periodic solutions for the Pochhammer-Chree equations. Appl. Math. Comput. 195(1), 24–33 (2008)
Wei, G., Pundikal, V., Carlo, C., Chandrali, B., Haci, M.B.: Modified Predictor-Corrector Method for the Numerical Solution of a Fractional-Order SIR Model with 2019-nCoV. Fractal Fract. 6(92), 1–13 (2022)
WuFulai, X., Deng, C.: Hyers-Ulam stability and existence of solutions for weighted Caputo-Fabrizio fractional differential equations. Chaos Solitons Fract. 5, 1–11 (2020)
Yan, L., Yel, G., Kumar, A., Baskonus, H.M., Gao, W.: Newly Developed Analytical Scheme and Its Applications to the Some Nonlinear Partial Differential Equations with the Conformable Derivative. Frac. Fract. 5(4) (2021)
Yan, L., Kumar, A., Guirao, J.L.G., Baskonus, H.M., Gao, W.: Deeper properties of the nonlinear Phi-four and Gross-Pitaevskii equations arising mathematical physics. Mod. Phy. Lett. B. 36(4), 215 (2022). https://doi.org/10.1142/S0217984921505679
Zhang, W., Ma, W.: Explicit solitary wave solution of the generalized Pochhammer-Chree (PC) equation. Appl. Math. Mech. 20, 666–74 (1999)
Funding
No funding available
Author information
Authors and Affiliations
Contributions
Authors contributed equally
Corresponding author
Ethics declarations
Competing financial interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper
Competing Interest
There is not any conflict of interest
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kumar, A., Fartyal, P. Dynamical behavior for the approximate solutions and different wave profiles nonlinear fractional generalised pochhammer-chree equation in mathematical physics. Opt Quant Electron 55, 1128 (2023). https://doi.org/10.1007/s11082-023-05416-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11082-023-05416-1