
Abstract
This article considers the global robust tracking control problem via output feedback for a class of nonlinear systems subjected to dynamic uncertainties and nonvanishing disturbances. A reduced-order extended state observer is firstly designed to estimate the unmeasured states and to compensate the external disturbances. Then, we propose a deadzone-based tracking control scheme, which could make the system output track any desired reference signal with small tracking error arbitrarily, and keep all signals in the closed-loop system bounded. It is shown that the parameter drift instability may be avoided using the proposed method through a numerical example. Finally, a fan speed system is used to demonstrate the effectiveness of the control strategy.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The global output feedback tracking control for nonlinear systems is an important and actively studied problem. The asymptotic output tracking aims to design a feedback law, such that the tracking error between the plant output and a prescribed smooth reference signal converges to zero as time approaches infinity; see, for instance, [1,2,3,4]. In many practical applications, because of the severe uncertainties or the less information on the reference signal, the asymptotic tracking is hardly realized. In such a case, the practical tracking could be an alternative with tracking error asymptotic to a ball of arbitrary prescribed radius \(\lambda >0\). The constant \(\lambda \) is called the prescribed accuracy, and hence, practical tracking is also known as the \(\lambda \)-tracking. Mainly because of weaker conditions and less information on reference signals, the practical tracking has received a lot of attention during the recent years, such as [5,6,7,8,9,10,11,12,13], and the references therein.
It is known that the disturbances would deteriorate the control performance and even destabilize the whole system. As noted in [14], the nonvanishing disturbances may result in the parameter drift instability. As a result, the disturbance rejection is a fundamental issue in control theory [15,16,17,18,19,20,21,22,23,24,25,26,27,28]. The active disturbance rejection control (ADRC) is a new control strategy proposed recently by Han [29] in dealing with the systems with large uncertainty. Extended state observer (ESO) is the most important part of ADRC and plays an important role in estimating the unmeasured states as well as the external disturbances. Through some kind of ESO, the “total disturbance” is considered as an extended state and then the estimation of the “total disturbance” is canceled in feedback. This estimation/cancelation feature makes this technique capable of eliminating the severe uncertainties and recently becomes an effective tool in engineering applications [30].
In this article, we use the idea of ESO to investigate the global robust practical tracking control problem for a class of nonlinear systems with nonvanishing disturbances. Technically, the external disturbances are firstly considered as an extended state, and then a reduced-order extended state observer (RESO) is constructed for the augmented system. In the procedure of control design, a deadzone together with some kind of pseudosign function in [9] is inserted into the update law of the dynamic gain to avoid its infinite increasing. Finally, we use two examples to illustrate our control scheme. It is noted that previous work on this practical system concentrates on the set-point tracking control, that is the tracking of constant reference signals like [28, 31,32,33]. The results are improved in [34], where the sine-type time-varying references are allowed in the context of output regulation. Here, in lieu of the assumption that the reference signals belong to a family of trajectories like the constant [28, 31,32,33] or sine type in [34], we propose a novel speed controller realizing the speed tracking control for any bounded continuously differentiable reference signals.
Our main work consists of the following aspects.
-
(i)
By designing a RESO, the practical tracking control problem is solved for a class of nonlinear cascaded system (1) in the presence of nonlinear dynamic uncertainties and less restrictive nonvanishing disturbances.
-
(ii)
A numerical example is provided here to demonstrate that the parameter drift instability may happen due to the additive external nonvanishing disturbances. This phenomenon can be avoided using the control scheme developed in this paper.
-
(iii)
As an application in practical systems, it is shown that the proposed control scheme could realize the practical tracking for the fan speed system in the presence of unknown load/drag torque with unmeasured armature current. This further improves the existing results [28, 31,32,33,34].
2 Problem statement and assumptions
In this article, we study the following class of cascade nonlinear systems
where \(z{\in }{{R}^r}\) represents the dynamic uncertainty, \(x=(x_1,\ldots ,x_{n}){\in } {R}^n\) are the system states, u is the input, y is the output. The time-varying and continuous function d(t) represents unknown parameters or disturbances. For existence and uniqueness of solutions, the uncertain functions \(\eta (\cdot )\) and \(\Delta _{ i}(\cdot )(1\le i\le n)\) are locally Lipschitz in (z, y). The states \((x_2,\ldots ,x_{n})\) as well as z of the z-subsystem are not assumed to be measurable. For the controlled system (1), our control task is to solve the global practical tracking problem.
Throughout the paper, we make the following assumptions.
Assumption 1
There exists a continuously differentiable, positive definite proper function \(V_0(z)\), and positive constants \(c_{ i}(i=1,\ldots ,4)\), such that
where \(p_0\) is any known integer in \({N}^*\)(the set of natural numbers).
Assumption 2
For \(i=1,\ldots ,n\), there exist unknown positive constants \(\delta _{i1}\) and \(\delta _{i2}\), such that
where k and \(p_{ i}\) are any known integers in \({N}^*\).
Assumption 3
The unknown external disturbance d(t) together with its first time derivative \({\dot{d}}(t)\) satisfies the following properties:
where \({\bar{d}}>0\) is a unknown constant.
Assumption 4
The reference signal \(y_d(t)\) is continuously differentiable and bounded. Specifically, there exists an unknown constant \(\varpi >0\) satisfying
Remark 1
Assumption 1 is an ISpS-like condition, and the similar assumption can be found in [35, 36]. The structural information of the z subsystem is unknown, and only the constant \(p_0\) is known apriori. In [14], the global regulation problem is studied under the assumption of \(\Delta _{ i}(\cdot )\) only depending on (z, y) and vanishing at the origin. Most recently, in [37], by skillfully inserting some kind of deadzone function into the control design, we realize the global practical tracking control under the nonvanishing nonlinearities. However, it does not involve the input disturbances in [37]. Here, we further consider the disturbance rejection problem in the presence of input additive disturbances with the help of the extended state observer technique (ESO). It will be shown in Example 4.1 that this is an interesting control problem.
Remark 2
Assumption 3 shows that the external disturbance d(t) and its time derivative \({\dot{d}}(t)\) are bounded by some unknown constants. This assumption is much weaker than the existing closely related results, such as [15, 19, 20, 27, 28]. For example, d(t) is not required to be \(L_2\) as in [19]. This relaxation allows the constant disturbances such as [27]. The disturbances d(t) and \({\dot{d}}(t)\) are not assumed to have any vanishing properties like in [20]. In addition, we also remove the restriction of \({\dot{d}}(t){\in } L_2\) in [28]. Here, it does only require that the unknown terms of d(t) and \({\dot{d}}(t)\) are bounded. This is a more relaxed version of noise signals [30].
Denote \({p}=\max \{(k+1)p_0,p_1,\ldots ,p_{n}\}\) and the tracking error \(\xi _1=y-y_d\), then we have the following lemma, whose proof is provided in Appendix A.
Lemma 1
For \(i=1,\ldots ,n\), there exist positive constants \(\delta _{ i}^*\) such that
The following kind of deadzone function is used in our paper, which is helpful to depress the parameter drift instability [14]. For arbitrary prescribed \(\lambda >0\), define the deadzone function \(d_{\frac{\lambda }{2}}(\cdot ):{R}{\rightarrow }[0,\infty )\) parameterized by \(\lambda \) as follows
It is known that \(d_{\frac{\lambda }{2}}(s)\ge 0\) is continuous but not differentiable at \(\pm \frac{\lambda }{2}\). Nonetheless, with \(i\ge 2\) an integer, \(d^i_{\frac{\lambda }{2}}(s)\) is continuously differentiable on R.
3 Robust tracking control design and main result
In this section, we develop a systematic design procedure using the backstepping method.
3.1 Robust tracking control design
We construct the following RESO.
where \(L_{ i}(i=2,\ldots ,n)\) are design parameters. Defining the error variables
together with (1) and (9), one has
which can be further written into the compact form
with
Choose parameters \(L_{ i}(i=2,\ldots ,n+1)\) such that A is asymptotically stable, and then there exists a positive definite matrix Q satisfying
For the error system (12), we have the following result. The proof is provided in Appendix B.
Lemma 2
Choose the positive definite function \(V_{{\tilde{x}}}={\tilde{x}}^\mathrm{T}Q{\tilde{x}}\), then its time derivative along (12) satisfies
where \(\Theta _{{\tilde{x}},{z}}\) and \(\Theta _{{\tilde{x}},{{\xi _1}}}\) are two positive constants.
In what follows, the controller design is provided in a step-wise strategy.
Step 1 Consider the function \(V_1\) defined by
It can be verified that the time derivation of \(V_1\) satisfies
In view of \(d^{ p}_{\frac{\lambda }{2}}(\xi _1)\ge 0\), from Lemma 1 and Assumption 4, we have
Applying the similar method in proving Lemma 1, one can find a positive constant \(\rho _1\) such that
and furthermore
As a result, (16) becomes
We take \({\hat{x}}_2+L_2y\) as the control input, and \(\vartheta _1\) is the virtual control law with the error variable \(\xi _2={\hat{x}}_2+L_2y-\vartheta _1\). Choose the first virtual control law and the updating law of the form
where \({\Gamma }>0\) is a design constant, and \(\mathrm{sig}_{\frac{\lambda }{2},n}(\cdot )\) is a pseudosign function as defined in [9]. It can be directly verified that
Considering
then with (21)–(24), we obtain
Step 2 Let \(V_2=\frac{1}{2}\xi _2^2\). Taking the time derivative of \(V_2\) yields
From Lemmas 1–2, by completing the squares, the uncertain terms in (26) can be handled as follows
Considering \(d^{ p}_{\frac{\lambda }{2}}(\xi _1)\) may be only a continuous function, inspired by [6], we choose a known smooth function \(\varphi (\xi _1)\) such that
which results in
Define \(\psi _2(\chi ,\xi _1,{\hat{x}}_2)={\xi _2}\left( 2L_2^2\xi _2(2+\xi _1^{2p})+(\frac{\partial {\vartheta }_1}{\partial {\xi }_1})^2(3+2(1+\xi _1^{2{p}})) +(\frac{\partial {\vartheta }_1}{\partial {\chi }})^2\varphi ^2(\xi _1)\right) \). Consequently, we get
Therefore, in view of (33), (26) becomes
Choose the virtual control law \(\vartheta _2\) of the form
Let \(\xi _3={\hat{x}}_3-\vartheta _2\), and a direct substitution yields to
Define \(\Omega _{c,2}=\frac{1}{4}+\frac{2}{4}\delta _1^{*2}+\frac{1}{4}\varpi ^{2}\), \(\Omega _{{\tilde{x}},2}=\frac{2}{4}\), \(\Omega _{z,2}=\frac{1}{4}\delta _1^{*2}\), and we have
Step i (\(3\le {i}\le {n}\)): By an induction argument, assuming that the virtual control laws \(\vartheta _{j}(1\le j\le i-1)\) have been designed, and with \(\xi _{j+1}={\hat{x}}_{j+1}-\vartheta _{j}(1\le j\le i-1)\), the time derivative of the following function
satisfies
with design parameters \(\mu _{j}>0(2\le j\le i-1)\).
In the sequel, one shows that the property (39) also holds in Step i. Let \(\xi _{i+1}={\hat{x}}_{i+1}-\vartheta _{ i}\), and we consider the function
In view of \({\dot{\xi }}_{ i}\), as in Step 2, by completing the squares, the following holds
and
Define \(\psi _{ i}(\chi ,\xi _1,{\hat{x}}_2,\ldots ,{\hat{x}}_{ i})={\xi _i}\left( (\frac{\partial {\vartheta }_{{i-1}}}{\partial {\xi }_1})^2(3+2(1+\xi _1^{2{p}})) +(\frac{\partial {\vartheta }_{{i-1}}}{\partial {\chi }})^2\varphi ^2(\xi _1)\right) \), and one has
Accordingly, the function \(V_{ i}\) satisfies
Take the virtual control \(\vartheta _{ i}\) as
with \(\mu _{ i}>0\), then we get
with \(\Omega _{{c,i}}=\Omega _{c,i-1}+\frac{1}{4}+\frac{1}{4}\delta _1^{*2}+\frac{1}{4}\varpi ^{2}, ~\Omega _{{\tilde{x}},{i}}=\Omega _{{\tilde{x}},{{ i-1}}}+\frac{1}{4}, ~\Omega _{{z,i}}=\Omega _{z,i-1}+\frac{1}{4}\delta _1^{*2}\).
In particular, when \(i=n\), the real control input u appears. Similar to (46) (using \(i=n\), and \(u+{\hat{x}}_{n+1}+L_{n+1}y=\vartheta _{n}\)), we obtain the actual control law of the form
such that the time derivative of the function
satisfies
This completes the controller design procedure. In the next subsection, it will be shown that the designed control law could achieve the control task.
3.2 Main results
Before the main result is presented, we first state the following facts. The proofs can be found in Appendices C and D.
Lemma 3
Choose the function \(U_{z}(z)=\left( V_0(z)\right) ^{k+1}\), then its time derivative along the z subsystem satisfies
where \({\overline{c}}_3\) and \(c_5\) are two positive constants.
Lemma 4
There exists a positive constant \(\rho _2\) such that for any \(\lambda >0\), the following holds
Now we give the main result in this paper.
Theorem 1
Suppose that the investigated system (1) and the reference signal \(y_d(t)\) satisfy Assumptions 1–4. When the \(\lambda \)-tracker designed in (48) is applied to (1), for every initial conditions \(z(0){\in }{{R}^r}, x(0){\in }{{R}^n}\), all the closed-loop signals are well defined and bounded on \([0,\infty )\), and moreover, the system output can realize the global robust \(\lambda \)-tracking control of any desired reference signal \(y_d(t)\) with prescribed accuracy \(\lambda \), i.e., for any given \(\lambda >0\), there exists a finite time \(T_{\lambda }>0\), such that
Proof
The proof can be carried out from the following two aspects. We first demonstrate the boundedness of all signals in closed loop on \([0,\infty )\), and then prove the \(\lambda \)-tracking property (53).
To this end, we consider the following Lyapunov function
with some constants \(l_1>0, l_2>0\). In view of (50) and Lemmas 2–3, one can get
In view of \({\overline{c}}_3>0\), the constants \(l_1,l_2\) and \(l_3\) can be chosen such that
Let \(c=\min \{2\mu _{ i}(i=2,\ldots ,n),\frac{1}{l_1\lambda _{\max }(Q)},\frac{1}{l_2c_2^{k}}\}\), where \(\lambda _{\max }(Q)\) denotes the maximum eigenvalue of the matrix Q, according to (55), (56) and (57), we get
By means of Lemma 2 in [6], one can find a constant \({\bar{c}}>0\), such that
Furthermore, using Lemma 4, we have
In view of (54), there exists a constant \(l_4>0\) satisfying
As a result of \(d^{ p}_{\frac{\lambda }{2}}(\xi _1)\ge 0\), one have
Considering (25), we derive that
Integrating both sides of (63), and from (60) we get
After some simple calculations, there holds
with some constant \(C=V_1(\xi _1(0))+\frac{1}{2\Gamma }\chi ^2(0)-\frac{\rho _1+{\bar{c}}\rho _2l_4}{\Gamma }\chi (0)\).
Suppose that \([0,t_{f})\) is the maximal interval of existence of the solutions. We will show that the variable \(\chi (t)\) is bounded on \([0,t_{f})\). Otherwise, if \(\chi (t)\) is unbounded, and then, in terms of \({\dot{\chi }}(t)\ge 0\), it concludes that \(\chi (t)\) tends to \(\infty \) as \(t{\rightarrow }{t_{f}}\). As a result, there exists \(t^*{\in }[0,t_{f})\) such that \(\chi (t^*)\ge 1\). Dividing by \(\chi (t)\) on time interval \([t^*,t_{f})\) in (65) results in
Since \(\chi (t)\) is unbounded, this will lead to a contradiction \(0<-\infty \). Therefore, \(\chi (t)\) is bounded. Consequently, \(V_1(\xi _1)\) and \(\xi _1(t)\) are bounded. From Assumption 4, we can conclude that y or \(x_1\) is bounded. From (58), since \(\xi _1(t)\) is bounded, it concludes that V is bounded and then, \(z(t), \xi _{ i}(t)(i=2,\ldots ,n)\) are bounded, which further guarantees that \({\tilde{x}}(t)\) is bounded. Considering the boundedness of \(\xi _1(t)\) and \(\chi (t)\), we know \(\vartheta _1\) is bounded. From \(\xi _2={\hat{x}}_2+L_2y-\vartheta _1\), it is clear that \({\hat{x}}_2\) is bounded. Using a recursive method, it can be concluded that \({\hat{x}}_{ i}(i=3,\ldots ,n+1)\) are bounded. From \({\tilde{x}}_{ i}=x_i-({\hat{x}}_{ i}+L_iy)(i=2,\ldots ,n+1)\), we know \(x_{ i}\) is bounded. In view of (48), the control law u is also bounded on \([0,t_{f})\). Therefore, we have established the boundedness of all the signals in closed loop, and hence \(t_{f}=\infty \).
Since \(\chi (t)\) is bounded and monotonely nondecreasing on \([0,\infty )\), \(\lim \nolimits _{t{\rightarrow }\infty }\chi (t)\) exists and is finite, which implies
It is not difficult to prove the uniformly continuous property of \({\dot{\chi }}(t)\) according to (22). Furthermore, it follows by Barbalat’s lemma in [38] that
In view of \(1+\xi _1^{2{p}}(t)\ge 1\), one can obtain
Considering \(d_{\frac{\lambda }{2}}(\xi _1(t))=\max \big \{|\xi _1(t)|-\frac{\lambda }{2},0\big \}\), for any \(\lambda >0\), there exists a finite time \(T_{\lambda }>0\), such that when \(t>T_{\lambda }\), the following holds
This completes the proof of Theorem 1. \(\square \)
4 Examples and discussion
In this section, we use two examples to illustrate our robust tracking control strategy. It is shown that using the proposed control approach, the parameter drift phenomenon can be avoided in Example 4.1, and the \(\lambda \)-tracking can be realized for the fan control system in Example 4.2.
Example 4.1
We consider the following simple system
where d(t) is the time-varying disturbance. In the case of \(d(t)=0\), the system (71) degenerates to the considered system (1) in [14], with \(r=1\), \(z=0\), \(\Delta _1(z,y,u)=y\). Using the control methodology in [14], the controller can be designed as follows
Consider the Lyapunov function \(V=\frac{1}{2}y^2\) whose time derivative along solutions of (71), (72) is
Using a contradiction argument, it can be proved that y and \(\chi \) are bounded. Moreover, according to Barbalat’s lemma, it further follows that y(t) converges to the origin as t tends to infinity.
In the case of \(d(t)\ne 0\), then the system (71) falls into our investigated system (1) with nonvanishing disturbance \(\Delta _1(z,y,u)=y+d(t)\). The controller (72) still could guarantee the convergence of y(t). In fact, we choose the following Lyapunov function candidate
then, in view of (71) and (72), we get
This shows that the system (71) is input-to-state stable (ISS) with state y and input d(t) [14]. As a result, if \(d(t){\rightarrow }0\) as \(t\rightarrow \infty \), then \(y(t){\rightarrow }{0}\) as \(t\rightarrow \infty \). However, in such case, the other variable \(\chi \) may drift to infinity as t goes to infinity. To illustrate this point, as suggested in [39], we choose d(t) in the form of
and \(\Gamma =\frac{1}{4}\), \(\chi (0)=1\), \(y(0)=1\), then
but
which destabilizes the closed-loop system.
However, considering the system (71) in the form of system (1) with \(n=1\) and \(p=1\), using the control scheme developed in Sect. 3, we design the following controller
which could guarantee the signals in closed-loop system bounded on \([0,\infty )\). The stability analysis can be done in the same way as in the proof of Theorem 1.
Example 4.2
In this example, we apply our output feedback tracking control strategy into the fan speed tracking control. The dynamics of a fan driven by a DC motor is described by [31, 32]
where \(\upsilon \) is the fan speed viewed as the output, I is the unmeasured armature current, \(\tau _\mathrm{L}\) is an uncertain constant load torque, \({\tau _\mathrm{D}}(\upsilon )\) is an uncertain drag torque, \(u_o\) is the armature voltage which is considered as the input, and \({J},L,{k_1},{k_2},R\) are known positive constants. The function d(t) represents some external disturbances. Like in [31], we assume here that \(\tau _D(\upsilon )=\kappa \,\upsilon \) with \(\kappa >0\) a possibly unknown constant.
Remark 3
In [28, 31,32,33], the proposed control schemes could realize the set-point tracking control of constant reference signals for this system (80). In [34], we consider the asymptotic tracking control for some smooth time-varying signals generated by an autonomous exosystem using the internal model principle. However, this framework severely limits the class of exogenous signals to be some kind of sinusoid references. Here, we remove the assumption that the reference signals that are constants in [31,32,33] or sinusoids in [34], and allows it to be any bounded time-varying trajectory. Additionally, although the current I is not measured, a preliminary feedback is needed in [31,32,33,34]. As a result, the actual control voltage \(u_o\) could not be worked out using these control schemes. In our recent work [28], assuming the parameters to be known a priori, the voltage \(u_o\) could be derived by designing a current observer. However, the work [28] still focuses on the constant reference signals. It is shown that our current work removes the above drawbacks: (1) the speed tracking control can be achieved for any time-varying references satisfying Assumption 4; (2) the actual control voltage \(u_o\) could be worked out by skillful coordinates changes (81) without the assistance of a current observer in [28].
In what follows, we give the control design procedure for (80). First, we define the following new state variables:
In view of (80) and (81), by some direct calculations, we have
which falls into the investigated system (1) with \(z=0\), \(\Delta _1(y)=-\frac{R}{L}x_1-\frac{1}{J}({\tau _\mathrm{L}}+{\tau _\mathrm{D}}(y))\), \(\Delta _2(y)=-\frac{k_1k_2}{JL}x_1-\frac{R}{JL}({\tau _L}+{\tau _D}(y))\), and the external disturbance \(\frac{k_1}{JL}d(t)\).

Using the proposed control scheme in Sect. 3, we design the following \(\lambda \)-tracking controller for (82)
with \(\vartheta _1, \chi \) defined as in (21), (22) and \(\psi _2(\chi ,\xi _1,{\hat{x}}_2)=\xi _2\left( \frac{1}{2}(\frac{k_1}{J})^2(\frac{\partial {\vartheta }_1}{\partial {\xi }_1})^2 +(\frac{\partial {\vartheta }_1}{\partial {\xi }_1})^22(1+\xi _1^2)\right) +(\frac{\partial {\vartheta }_1}{\partial {\xi }_1})^2+(\frac{\partial {\vartheta }_1}{\partial {\xi }_1})^2\varphi ^2(\xi _1)\). According to (81), we work out the actual control voltage for the fan speed system (80)
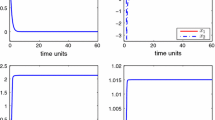
For simulation purposes, the tracked reference signal \(y_d(t)\) is chosen as
The external disturbance is \(d(t)=0.5\sin (t)\). The parameter values in (80) are set to \(J=1, L=1, k_1=1, k_2=1, R=10, \kappa =1\). The design parameters and initial condition are chosen as \(\mu _2=5, \lambda =0.1\), \(\Gamma =1.5\), \(\varpi =2\), \(L_2=3, L_3=2\), and \({\tilde{x}}_2(0)=1, x_1(0)=0.5, {\hat{x}}_2(0)=1, \chi (0)=1.5\), and the functions are \(\varphi (\xi _1)=(1+\xi _1^2)^2\) and
The simulation results are shown in Fig. 1, from which one can see the fan speed \(\upsilon \) can realize the \(\lambda \)-tracking control for the reference signal \(y_d\) with the tracking error asymptotic to an interval \([-0.1,0.1]\). Figure 1 also shows the current I and its estimate \({\hat{I}}\) as well as the control voltage \(u_o\) are bounded, which demonstrate the efficacy of the presented control scheme.
5 Conclusions
In this paper, by designing a RESO, the global robust practical tracking control problem is investigated for a class of nonlinear systems with the additive nonvanishing disturbances and dynamic uncertainties. With less information on the reference signal, the designed robust tracking controller could guarantee that the tracking error asymptotic to the interval \([-\lambda ,\lambda ]\) with arbitrary prescribed \(\lambda \) after a finite time. The computer simulation demonstrates its effectiveness by its application into the fan speed control system. However, a restrictive condition is that the uncertain nonlinearities need to satisfy the polynomial growth of the output. How to remove this assumption is an interesting topic in the future research.
References
Andrieu, V., Praly, L., Astolfi, A.: Asymptotic tracking of a reference trajectory by output-feedback for a class of nonlinear systems. Syst. Control Lett. 58(9), 652–663 (2009)
Zhang, X., Lin, Y.: A new approach to global asymptotic tracking for a class of low-triangular nonlinear systems via output feedback. IEEE Trans. Autom. Control 57(12), 3192–3196 (2012)
Zhang, Z.Q., Xu, S.Y., Zhang, B.Y.: Asymptotic tracking control of uncertain nonlinear systems with unknown actuator nonlinearity. IEEE Trans. Autom. Control 59(5), 1336–1341 (2014)
Li, Y.X., Yang, G.H.: Adaptive asymptotic tracking control of uncertain nonlinear systems with input quantization and actuator faults. Automatica 72(10), 177–185 (2016)
Ilchmann, A., Ryan, E.P.: Universal \(\lambda \)-tracking for nonlinearly perturbed systems in the presence of noise. Automatica 30(2), 337–346 (1994)
Ye, X.D.: Universal \(\lambda \)-tracking for nonlinearly-perturbed systems without restrictions on the relative degree. Automatica 35(1), 109–119 (1999)
Gong, Q., Qian, C.J.: Global practical tracking of a class of nonlinear systems by output feedback. Automatica 43(1), 184–189 (2007)
Peixoto, A.J., Oliveira, T.R., Hsu, L., Lizarralde, F., Costa, R.R.: Global tracking sliding mode control for a class of nonlinear systems via variable gain observer. Int. J. Robust Nonlinear Control 21(2), 177–196 (2011)
Yan, X.H., Liu, Y.G.: Global practical tracking for high-order uncertain nonlinear systems with unknown control directions. SIAM J. Control Optim. 48(7), 4453–4473 (2010)
Liu, Y.G.: Global output-feedback tracking for nonlinear systems with unknown polynomial-of-output growth rate. Control Theory Appl. 31(7), 921–933 (2014)
Jin, S.L., Liu, Y.G.: Global practical tracking via adaptive output feedback for uncertain nonlinear systems with generalized control coefficients. Sci. China Ser. F Inf. Sci. 59(1), 012203 (2016)
Zhang, X., Lin, Y.: Robust adaptive tracking of uncertain nonlinear systems by output feedback. Int. J. Robust Nonlinear Control 26(10), 2187–2200 (2016)
Niu, B., Liu, Y.J., Zong, G.D., Han, Z.Y., Fu, J.: Command filter-based adaptive neural tracking controller design for uncertain switched nonlinear output-constrained systems. IEEE Trans. Cybern. 47(10), 3160–3171 (2017)
Jiang, Z.P., Mareels, I., Hill, D.J., Huang, J.: A unifying framework for global regulation via nonlinear output feedback: from ISS to iISS. IEEE Trans. Autom. Control 49(4), 549–562 (2004)
Cai, Z., de Queiroz, M.S., Dawson, D.M.: Robust adaptive asymptotic tracking of nonlinear systems with additive disturbance. IEEE Trans. Autom. Control 51(3), 524–529 (2006)
Freeman, R.A., Krstić, M., Kokotović, P.V.: Robustness of adaptive nonlinear control to bounded uncertainties. Automatica 34(10), 1227–1230 (1998)
Bayat, F., Mobayen, S., Javadi, S.: Finite-time tracking control of nth-order chained-form nonholonomic systems in the presence of disturbances. ISA Trans. 63(7), 78–83 (2016)
Chen, W.H.: Disturbance observer based control for nonlinear systems. IEEE/ASME Trans. Mech. 9(4), 706–710 (2004)
Yu, X., Liu, G.H.: Output feedback control of nonlinear systems with uncertain ISS/iISS supply rates and noises. Nonlinear Anal. Model. Control 19(2), 286–299 (2014)
Zhang, C.L., Yang, J., Li, S.H., Yang, N.: A generalized active disturbance rejection control method for nonlinear uncertain systems subject to additive disturbance. Nonlinear Dyn. 83(4), 2361–2372 (2015)
Cui, R.X., Chen, L.P., Yang, C.G., Chen, M.: Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities. IEEE Trans. Ind. Electr. 64(8), 6785–6795 (2017)
Xie, X.P., Yue, D., Peng, C.: Multi-instant observer design of discrete-time fuzzy systems: a ranking-based switching approach. IEEE Trans. Fuzzy Syst. 25(5), 1281–1292 (2017)
Yang, J., Chen, W.H., Li, S.H.: Nonlinear disturbance observer-based robust control for systems with mismatched disturbances/uncertainties. IET Control Theory Appl. 5(18), 2053–2062 (2011)
Shen, H., Huo, S.C., Cao, J.D., Huang, T.W.: Generalized state estimation for Markovian coupled networks under round-robin protocol and redundant channels. IEEE Trans. Cybern. (2018) https://doi.org/10.1109/TCYB.2018.2799929
Zhou, J.P., Park, J.H., Ma, Q.: Non-fragile observer-based \(H_{\infty }\) control for stochastic time-delay systems. Appl. Math. Comput. 291(12), 69–83 (2016)
Man, Y.C., Liu, Y.G.: Global output-feedback stabilization for a class of uncertain time-varying nonlinear systems. Syst. Control Lett. 90(4), 20–30 (2016)
Huang, Y.X., Liu, Y.G.: A compact design scheme of adaptive output-feedback control for uncertain nonlinear systems. Int. J. Control (2018) https://doi.org/10.1080/00207179.2017.1350756
Wu, K., Yu, J.B., Sun, C.Y.: Global robust regulation control for a class of cascade nonlinear systems subject to external disturbance. Nonlinear Dyn. 90(2), 1209–1222 (2017)
Han, J.Q.: From PID to active disturbance rejection control. IEEE Trans. Ind. Electr. 56(3), 900–906 (2009)
Zhao, Z.L., Guo, B.Z.: Extended state observer for uncertain lower triangular nonlinear systems. Syst. Control Lett. 85(6), 100–105 (2015)
Freeman, R., Kokotović, P.V.: Robust Nonlinear Control Design. Birkhäuser, Boston (1996)
Jiang, Z.P., Mareels, I.: Robust nonlinear integral control. IEEE Trans. Autom. Control 46(8), 1336–1342 (2001)
Wu, Y.Q., Yu, J.B., Zhao, Y.: Output feedback regulation control for a class of cascade nonlinear systems with its application to fan speed control. Nonlinear Anal. Real World Appl. 13(3), 1278–1291 (2012)
Yu, J.B., Zhao, Y., Wu, Y.Q.: Global robust output regulation control for cascaded nonlinear systems using the internal model principle. Int. J. Control 87(4), 802–811 (2014)
Chen, Z.Y., Huang, J.: Global output feedback stabilization for uncertain nonlinear systems with output dependent incremental rate. In: American Control Conference, Boston, USA, pp. 3047–3052 (2004)
Wu, Z.J., Xie, X.J., Shi, P.: Robust adaptive output-feedback control for nonlinear systems with output unmodeled dynamics. Int. J. Robust Nonlinear Control 18(11), 1162–1187 (2008)
Yu, J.B., Zhao, Y., Wu, Y.Q.: Global robust output tracking control for a class of uncertain cascaded nonlinear systems. Automatica 93(7), 274–281 (2018)
Khalil, H.K.: Nonlinear Systems. Prentice Hall, New Jersey (2002)
Ioannou, P.A., Sun, J.: Robust Adaptive Control. Prentice Hall, Upper Saddle River, NJ (1995)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
This work is supported by the National Natural Science Foundation of China (61304008, 61673243, 61603224), the Outstanding Middle-age and Young Scientist Award Foundation of Shandong Province under Grant BS2015DX008, and the Doctor Research Foundation of Shandong Jianzhu University(XNBS1342)
Appendices
Appendix A: Proof of Lemma 1
In accordance with Assumptions 2–4, we have
Using the Young’s inequality in [9], the following holds
and
As a consequence,
Taking a positive constant \(\delta _{ i}^*=\delta _{i1}+\delta _{i2}+\delta _{i2}{\cdot }2^{p_{ i}-1}\left( \varpi ^{p_{ i}}+1\right) \), then the lemma is proved.
Appendix B: Proof of Lemma 2
The time derivative of \(V_{{\tilde{x}}}\) along the solutions of (12) satisfies
By completing the squares, one have the following calculations:
with \(l=\max \left\{ 8\Vert Q\Vert ^2,4\Vert Q\Vert ^2\left( 2\sum _{i=2}^{n}L_{ i}^2+L_{n+1}^2\right) \right\} \). According to Lemma 1, we have
Then, we further get
Additionally, using the completion of squares again, the following holds
Combining the above analysis, we have
Next, we will prove that there exists a positive constant \(\sigma \) such that
If \(|\xi _1|\le \frac{\lambda }{2}\), from the definition of \(d_{\frac{\lambda }{2}}(\cdot )\), we know \(d_{\frac{\lambda }{2}}^{2{p}}(\xi _1)=0\), and the left-hand side satisfies
If \(|\xi _1|>\frac{\lambda }{2}\), using the completion of squares again, the following holds
Therefore, (96) holds with \(\sigma =\max \big \{1+(\frac{\lambda }{2})^{2{p}},1+2^{2{p}-1}(\frac{\lambda }{2})^{2{{p}}}+2^{2{p}-1}\big \} =1+2^{2{p}-1}(\frac{\lambda }{2})^{2{{p}}}+2^{2{p}-1}\). Let \(\Theta _{{\tilde{x}},{z}}=2l\sum _{i=2}^{n}\delta _{ i}^{*2}, ~\Theta _{{\tilde{x}},{{\xi _1}}}=\max \{2nl\sigma ,4\Vert Q\Vert ^2{\bar{d}}^{\,2}\}\), then the lemma is proved.
Appendix C: Proof of Lemma 3
In view of Assumption 1 and \(U_{z}(z)=\left( V_0(z)\right) ^{k+1}\), it can be verified that
For any \(\varepsilon >0\), using the Young’s inequality, we obtain
In view of the definition of p, it can be shown that
According to (96), we further have
with \(\varrho =\frac{5}{4}2^{k+1}(1+2^{p-1}+2^{p-1}M^{p})\sigma \).
As a result,
Let \({\overline{c}}_3=(k+1)c_1^{k}c_3-\varepsilon {k}c_2^k{c}_4,~c_5=\varepsilon ^{-k}c_2^k{c}_4\varrho \). Choose \(\varepsilon >0\) appropriately satisfying \({\overline{c}}_3>0\). This fact together with (99)–(101) implies that
Appendix D: Proof of Lemma 4
The proof can be established from the following two cases.
Case one: \(|\xi _1|\le \frac{\lambda }{2}\). It is clear that the lemma holds for any \(\rho _2>0\), because of \(d_{\frac{\lambda }{2}}^{ p}(\xi _1)=0\).
Case two: \(|\xi _1|>\frac{\lambda }{2}\). In view of \(d_{\frac{\lambda }{2}}^{ p}(\xi _1)=\left( |\xi _1|-\frac{\lambda }{2}\right) ^{ p}>0\), it suffices to prove there exists \(\rho _2>0\) such that
In fact, as the left-hand side of (105), using the Young’s inequality, we have
Take \(\rho _2=\frac{3}{2}\left( 1+2^{{p}-1}+2^{{p}-1}(\frac{\lambda }{2})^{ p}\right) \), and one has (105). Consequently, the proof is completed.
Rights and permissions
About this article

Cite this article
Yu, JB., Wu, YQ. Global robust tracking control for a class of cascaded nonlinear systems using a reduced-order extended state observer. Nonlinear Dyn 94, 1277–1289 (2018). https://doi.org/10.1007/s11071-018-4423-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4423-7