
Abstract
A new lattice hydrodynamic traffic flow model is proposed by considering the preceding lattice site’s flux change rate effect. Using linear stability theory, stability condition of the presented model is obtained. It is shown that the stability region significantly enlarges as the flux change rate effect increases. To describe the propagation behavior of a density wave near the critical point, nonlinear analysis is conducted and mKdV equation representing kink-antikink soliton is derived. To verify the theoretical findings, numerical simulation is conducted which confirms that preceding lattice site’s flux change rate can improve the stability of traffic flow effectively.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Recent years have witnessed more and more efforts devoted to the complex traffic behavior modeling investigation such as car-following model, cellular automata model, gas kinetic model and hydrodynamic models [1,2,3,4]. Some of the most remarkable characteristics that need to be modeled in complex traffic system are the jamming transition, phase transitions and critical phenomena [5, 6]. Recently, Nagatani [6,7,8] proposed a lattice hydrodynamic model, the lattice versions of continuum models of traffic, which can describe the complex traffic phenomena in traffic flow on a highway, and it is a simplified version of macroscopic model and also incorporates the ideas of car-following models.
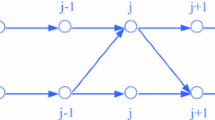
Since the single-lane lattice hydrodynamic model was proposed by Nagatani [7] to investigate the traffic jam. A lot of extended lattice hydrodynamic models have been widely employed to investigate the traffic jam and nonlinear traffic phenomena in traffic system for its convenience to analyze traffic density waves. Such as the lattice model proposed in [9,10,11,12] by considering the density difference effect, some were developed by introducing drivers’ anticipation effect or other characteristics [13,14,15,16,17,18], and the others were extended by considering special traffic road [19,20,21,22,23,24,25,26]. Based on the lattice hydrodynamic models, delayed-feedback control and some other control schemes were proposed to homogenize traffic flow [27,28,29,30]. Besides that, Cheng et al. [31] found that aggressive driving is better than timid act because the aggressive driver will adjust his speed timely according to the leading car’s speed. Gupta et al. [32] studied the effect of driver’s anticipation with passing and they found that traffic jam can be suppressed efficiently by considering the anticipation effect in the new lattice model. Two-dimensional network as a typical traffic scene, it also has received an astonishing amount of attention, such as the references in [33,34,35] to name just a few.
Recently, transportation cyber physical systems (T-CPS) have been increasingly used to improve the road system regarding efficiency, emissions, driver comfort, and safety. Recent advances in inter-vehicle communications and vehicle-infrastructure integration paved ways to real-time information sharing among vehicles and infrastructures [36]. And some hydrodynamic lattice models were proposed by considering multi-lattices’ information [37, 38], where the simulation results shown that the multi-lattices’ information is beneficial for traffic flow in suppressing congestion.
In fact, except the density and flux, the flux change rate of lattice site also can be obtained for a modern traffic system. But whether the preceding lattice site’s flux change rate can improve or reduce the stability of the traffic flow is still unknown. So it is necessary to understand the information (flux change rate) from downstream impact on traffic system and make full use of the information is very important. The rest of the paper is organized as follows. Section 2 introduces a new hydrodynamic model with consideration of preceding lattice site’s flux change rate. Section 3 presents the linear stability analysis of the new model. The mKdV equation near the critical point is derived by using nonlinear reductive perturbation method, and its kink-antikink soliton solution is also obtained to depict the propagating behavior of traffic density waves in Sect. 4. Simulation setup and analyses of the results are discussed in Sect. 5. Finally, Sect. 6 offers conclusion and future direction in this study.
2 The new model
In 1998, Nagatani proposed a simplified version of the hydrodynamic model to analyze the density wave and describe the traffic phenomena in traffic flow on unidirectional roads. The governing equations are described as follows:
where \(\rho _0\) is the average density, \(\alpha \) is the sensitivity of a driver, and j indicates site j on a one-dimensional lattice; \(\rho _j\) and \(v _j\), respectively, represent the local density and velocity at site j; \(V(*)\) is the optimal velocity function, for simplicity, and without loss of generality, it is adopted in this paper as follows:
Similarly, for simplicity, where \(v_{\mathrm{max}}=2\) is the maximal velocity and \(\rho _c=0.25\) is the critical density. The optimal velocity function \(V(\rho )\) is a monotone decreasing function with an upper bound of \(v_{\mathrm{max}}\) and has a turning point at \(\rho =\rho _c\). Today, extensive efforts are focused upon solving problems related to traffic congestion by applying a wide range of information technologies to manage and control traffic flow, such as the advanced traveler information systems based on the estimation and prediction of traffic flow are successfully implemented for use in transportation systems. Therefore, the modern transportation system is a typical cyber physical system which tight coupling between transportation cyber system and transportation physical system. In this condition, the flux change rate in the downstream can be received and it is an important information for the upstream section to adjust the flux in advance. Based on Nagatani’s [7] model, the new model is presented:
where k is the strength coefficient of flux change rate effect. As \(k=0\), the new model is Nagatani’s model [7]. By eliminating speed v in Eqs. (1) and (4), the following density equation is obtained:
3 Stability analysis
In this section, the stability analysis is applied to investigate the influence of the flux change rate from downstream in the new model. The new lattice hydrodynamic model is generalized to a nonlinear cascaded system, without loss of generality, and we assume that each lattice site has the equilibrium state \([\rho _j \ \partial _t \rho _j]=[\rho ^0 \ 0]\). The linearized system of Eq. (5) around equilibrium state can be rewritten as follows:
where \(\rho _j = \rho ^0 + \rho ^* _j\), \(\Lambda = \frac{dV(\rho )}{d\rho }\Vert _{\rho =\rho ^0}\).
In order to facilitate the analysis, we take the Laplace transformation of system of Eq. (6), and then the model (6) can be formulated in the Laplace domain as follows:
where \(P_j(s)= {\mathcal {L}} (\rho ^* _j)\), \({\mathcal {L}}\) denote the Laplace transform, and s is the complex number frequency. Then, we can obtain the transfer function that described the density error dynamics propagated from \(j+1\)th site to jth site.
According to the definition in [39, 40] related to the stability of the interconnect systems, if the new lattice model (4) is stable, then Eq. (9) must satisfy
where
Then, the following inequalities are obtained:
If the stability condition (11) is satisfied, then traffic jam does not occur in the traffic flow model. For \(k=0\), the above stability condition will reduce into the same as for Nagatani [7]. Equation (11) clearly shows that the preceding lattice site’s flux change play an important role in stabilizing the traffic flow.
In general, few vehicles on the road means the traffic density close to zero. On the other hand, when there is a lot of vehicles on the road and they cannot move at all, we define the traffic density for this case as 1. Figure 1 indicates that the stable regions increase with an increase in the value of the strength coefficient of flux change rate. Therefore, we can conclude that the consideration of the preceding lattice site’s flux change rate can improve the traffic stability and it is helpful for suppressing the traffic congestion.

The regions in density\(-\,\alpha -\,k\) space where under the surface is unstable
4 Nonlinear analysis
In this section, the reductive perturbation method is used to investigate the nonlinear properties of traffic density waves near the critical point \((\rho _c \ \alpha _c)\). For space variable j and time variable t, we define slow variables X and T as follows:
where \(\varepsilon \) is a small positive scaling parameter and is a constant determined later. The density \(\rho _j (t)\) is defined as
Substituting Eqs. (12) and (13) into Eq. (5) and making the Taylor expansion to the fifth order of \(\varepsilon \), one obtains the following expression:
where \(F_2 = \partial _X R[\rho ^2 _0 V ^{\prime } +b]\), \(F _3 = \partial ^2 _X R[\frac{(1-k)b^2}{\alpha }+\frac{1}{2}\rho ^2 _0 V ^{\prime }]\), \(F _4 = (\frac{\rho ^2 _0 V ^{\prime }}{6}-\frac{kb^2}{\alpha })\partial ^3 _X R +\frac{\rho ^2 _0 V ^{\prime \prime \prime }}{6} \partial _X R ^3 + \partial _T R\), \(F _5 = (\frac{2b}{\alpha }-\frac{2kb}{\alpha })\partial _T \partial _X R +(\frac{\rho ^2 _0 V ^{\prime }}{24}-\frac{kb^2}{2\alpha })\partial ^4 _X R +\frac{\rho ^2 _0 V ^{\prime \prime \prime }}{12}\partial ^2 _X R^3\), \(V ^{\prime }=\frac{dV(\rho _j)}{d\rho _j}\Vert _{\rho _j =\rho _c}\) and \(V ^{\prime \prime \prime }=\frac{d^3(V(\rho _j))}{d(\rho _j)^3}\Vert _{\rho _j = \rho _c}\).
Near the critical point \((\rho _c \ \alpha _c)\), \(\frac{1}{\alpha }=\frac{1+\varepsilon ^2}{\alpha _c}\). Taking \(b=-\rho ^2 _0 V ^{\prime }\) and eliminating the second order and third order terms of \(\varepsilon \) in Eq. (14), one obtains the following simplified equation:
where \(g _1=\frac{kb^2}{\alpha _c}-\frac{\rho ^2 _c V^{\prime }}{6}\), \(g_2=\frac{\rho ^2 _c V ^{\prime \prime \prime }}{6}\), \(g_3=-\frac{\rho ^2 _c V ^{\prime }}{2}\), \(g_4=\frac{\rho ^2 _c V ^{\prime }}{24}-\frac{kb^2}{2\alpha _c}-\frac{2b(1-k)}{\alpha _c}(\frac{\rho ^2 _c V ^{\prime }}{6}-\frac{kb^2}{\alpha _c})\), \(g_5=\frac{\rho ^2 _c V ^{\prime \prime \prime }}{12}-\frac{2b(1-k)\rho ^2 _c V ^{\prime \prime \prime }}{6\alpha _c}\).
In order to derive the standard mKdV equation, we make the following transformations:
Then, Eq. (15) turns into
where \(M[R^{\prime }]=\frac{1}{g_1}(g_3\partial ^2 _X R ^{\prime }+g_4\partial ^4 _X R^{\prime }+\frac{g_1 g_5}{g_2}\partial ^2 _X R ^{\prime 3})\). Eq. (17) is the standard mKdV equation with an \(O(\varepsilon )\) correction term. By ignoring the \(O(\varepsilon )\) term, we get the following kink-antikink soliton solution of the mKdV equation
Supposing \(R^{\prime }(X,T^{\prime })=R^{\prime } _0(X,T^{\prime })+\varepsilon R^{\prime } _1(X,T^{\prime })\), in order to determine the value of the propagation velocity for the kink-antikink soliton solution, it is necessary to satisfy the following condition:
According to the method described in [41,42,43], by solving Eq. (19), one can obtain the selected velocity for the kink-antikink soliton solution as follows:
Hence, the kink-antikink solution near the critical point can be rewritten as
Thus, the amplitude A of the kink-antikink soliton solution is described by
The kink-antikink soliton represents the coexisting phases including the freely moving phase with low density and the congested phase with high density. The densities of the freely moving phase and congested phase are given by \(\rho _j=\rho _c -A\) and \(\rho _j=\rho _c +A\), respectively.

Phase diagram in parameter space \((\rho ,\alpha )\). The dotted lines and the solid curves indicate the coexisting curves and the neutral stability lines, respectively, for different k

Space-time evolutions of local density for different parameters k

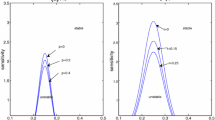
The density profile at \(t=900s\) for different parameters k
Figure 2 shows the coexisting curves and the neutral stability curves in the density-sensitivity space. The sensitivity (\(\alpha \)) described in [6, 7, 44] is related to delay time of a driver (\(\tau \)): \(\alpha =\frac{1}{\tau }\), and the delay time of a driver indicates seconds. For each pair of curves, the space is divided into three regions, i.e., the stable region, the metastable region and the unstable region. From Fig. 2, we can find the critical points, and the neutral stability lines and the coexisting curve decrease with the increase in the strength coefficient of flux change rate k, which also means the stability of the uniform traffic flow has been strengthened further by considering the preceding lattice site’s flux change rate ahead.
5 Numerical simulation
In this section, we investigate the effect of preceding lattice site’s flux change rate for new model numerically and validate the theoretical results under the periodic boundary. And the initial density profile is set as follows:
where the total number of sites M is taken as 100, the initial disturbance \(\sigma \) taken as 0.05 and other parameters are set as follows: \(\rho _0 =0.25\), \(\alpha =1.2\). For all results, we use the Runge–Kutta algorithm for numerical integration with time-step \(\Delta t=0.1\) s.
Figure 3 shows the spatiotemporal evolution of density waves, when the strength coefficient of flux change rate \(k=0\) and \(k=0.25\), the small disturbance is added to the uniform traffic flow, this is amplified and finally evolve into inhomogeneous flow. One can see that the kink-antikink waves appear and propagate backwards in this condition. It indicates that the traffic flow is unstable which is consistent with the theoretical result in Eq. (11). But with the increase in the strength coefficient k, the amplitudes of the density waves decreases; as soon as \(k=0.5\) and \(k=0.75\), the small amplitude perturbation to the homogeneous density dies out. It indicates that the traffic flow is stable which is also consistent with the theoretical result in Eq. (11).
Figure 4 describes the density profile at sufficiently large time \(t=900\) s corresponding to Fig. 3. It is also clear from Fig. 4 that for small values of k, a nonlinear wave with kink-antikink form similar to the solution of mKdV equation appears and propagates backward. And it exhibits the stop-and-go waves in traffic flow. The amplitude of the density wave decreases and converts into an oscillatory traffic and finally evolves into uniform flow with an increase in strength coefficient k, which is consistent with the description in Figs. 1 and 2. Therefore, the simulation results are in good agreement with theoretical analysis.
6 Conclusions
In this manuscript, we proposed a new lattice hydrodynamics model by considering the effect of preceding lattice site’s flux change rate. The effects of flux change rate on traffic flow dynamics have been examined through linear and nonlinear analyses. From nonlinear analysis, we derived the kink-antikink solution of mKdV to describe the traffic flow near the critical point. Phase diagram in the density-sensitivity space with the neutral stability curves and the coexisting curves is given for different values of strength coefficients of flux change rate effect. It can be seen that with the increase in the value of k, the unstable region reduces. Numerical simulation shows that flux change rate effect plays an important role in stabilizing the traffic flow. Simulation results obtained are also in good agreement with the theoretical findings which verifies that our consideration is useful. However, only one preceding lattice site’s flux change rate has been considered in this paper; whether the flux change rate from more lattice sites works well for the stability of traffic flow is our future work.
References
Brackstone, M., McDonald, M.: Car-following: a historical review. Transp. Res. F 2(4), 181–196 (1999)
Chowdhury, D., Santen, L., Schadschneider, A.: Statistical physics of vehicular traffic and some related systems. Phys. Rep. 329(4), 199–329 (2000)
Hoogendoorn, S.P., Bovy, P.H.: State-of-the-art of vehicular traffic flow modelling. Proc. Inst. Mech. Eng. Part I J. Sys. Control Eng. 215(4), 283–303 (2001)
Schadschneider, A.: Traffic flow: a statistical physics point of view. Phys. A: Stat. Mech. Appl. 313(1), 153–187 (2002)
Helbing, D., Hennecke, A., Treiber, M.: Phase diagram of traffic states in the presence of inhomogeneities. Phys. Rev. Lett. 82(21), 4360 (1999)
Nagatani, T.: Jamming transitions and the modified Kortewegde Vries equation in a two-lane traffic flow. Phys. A: Stat. Mech. Appl. 265(1), 297–310 (1999)
Nagatani, T.: Modified KdV equation for jamming transition in the continuum models of traffic. Phys. A: Stat. Mech. Appl. 261(3), 599–607 (1998)
Nagatani, T.: TDGL and MKdV equations for jamming transition in the lattice models of traffic. Phys. A: Stat. Mech. Appl. 264(3), 581–592 (1999)
Wang, T., Gao, Z., Zhang, J., Zhao, X.: A new lattice hydrodynamic model for two-lane traffic with the consideration of density difference effect. Nonlinear Dyn. 75, 27–34 (2014)
Tian, J.F., Yuan, Z.Z., Jia, B., Fan, H.Q.: Phase transitions and the Korteweg-de Vries equation in the density difference lattice hydrodynamic model of traffic flow. Int. J. Mod. Phys. C 24(03), 1350016 (2013)
Gupta, A.K., Redhu, P.: Analysis of a modified two-lane lattice model by considering the density difference effect. Commun. Nonlinear Sci. Numer. Simul. 19(5), 1600–1610 (2014)
Gupta, A.K., Redhu, P.: Jamming transition of a two-dimensional traffic dynamics with consideration of optimal current difference. Phys. Lett. A 377(34), 2027–2033 (2013)
Peng, G.H., Nie, F.Y., Cao, B.F., Liu, C.Q.: A driver’s memory lattice model of traffic flow and its numerical simulation. Nonlinear Dyn. 67, 18111815 (2012)
Kang, Y.R., Sun, D.H.: Lattice hydrodynamic traffic flow model with explicit drivers’ physical delay. Nonlinear Dyn. 71, 531537 (2013)
Peng, G.: A new lattice model of the traffic flow with the consideration of the driver anticipation effect in a two-lane system. Nonlinear Dyn. 73, 1035–1043 (2013)
Cheng, R.J., Li, Z.P., Zheng, P.J., Ge, H.X.: The theoretical analysis of the anticipation lattice models for traffic flow. Nonlinear Dyn. 76, 725731 (2014)
Sharma, S.: Lattice hydrodynamic modeling of two-lane traffic flow with timid and aggressive driving behavior. Phys. A: Stat. Mech. Appl. 421, 401–411 (2015)
Zhang, G., Sun, D.H., Liu, W.N., Zhao, M., Cheng, S.L.: Analysis of two-lane lattice hydrodynamic model with consideration of drivers’ characteristics. Phys. A: Stat. Mech. Appl. 422, 16–24 (2015)
Peng, G.H., Cai, X.H., Cao, B.F., Liu, C.Q.: Non-lane-based lattice hydrodynamic model of traffic flow considering the lateral effects of the lane width. Phys. Lett. A 375(30), 2823–2827 (2011)
Tang, T.Q., Huang, H.J., Xue, Y.: Improved two-lane traffic flow lattice model. Acta Phys. Sin. 55(8), 4026–31 (2006)
Zhang, M., Sun, D.H., Tian, C.: An extended two-lane traffic flow lattice model with driver’s delay time. Nonlinear Dyn. 77, 839847 (2014)
Gupta, A.K., Sharma, S., Redhu, P.: Effect of multi-phase optimal velocity function on jamming transition in a lattice hydrodynamic model with passing. Nonlinear Dyn. 80, 10911108 (2015)
Zhou, J., Shi, Z.K., Wang, C.P.: Lattice hydrodynamic model for two-lane traffic flow on curved road. Nonlinear Dyn. 85, 1423–1443 (2016)
Li, Y., Song, Y., Yang, B., Zheng, T., Feng, H., Li, Y.: A new lattice hydrodynamic model considering the effects of bilateral gaps on vehicular traffic flow. Nonlinear Dyn. 87, 1–11 (2017)
Jin, Y.D., Zhou, J., Shi, Z.K., Zhang, H.L., Wang, C.P.: Lattice hydrodynamic model for traffic flow on curved road with passing. Nonlinear Dyn (2017). https://doi.org/10.1007/s11071-017-3439-8
Kaur, R., Sharma, S.: Analysis of driver’s characteristics on a curved road in a lattice model. Phys. A: Stat. Mech. Appl. 471, 59–67 (2017)
Redhu, P., Gupta, A.K.: Delayed-feedback control in a Lattice hydrodynamic model. Commun. Nonlinear Sci. Numer. Simul. 27(1–3), 263–270 (2015)
Ge, H.X., Cui, Y., Zhu, K.Q., Cheng, R.J.: The control method for the lattice hydrodynamic model. Commun. Nonlinear Sci. Numer. Simul. 22(1–3), 903–908 (2015)
Wang, Y., Cheng, R., Ge, H.: A lattice hydrodynamic model based on delayed feedback control considering the effect of flow rate difference. Phys. A: Stat. Mech. Appl. 479, 478–484 (2017)
Xue, Y., Guo, Y., Shi, Y., Lv, L.Z., He, H.D.: Feedback control for the lattice hydrodynamics model with drivers reaction time. Nonlinear Dyn. 88(1), 145–156 (2017)
Cheng, R.J., Ge, H.X., Wang, J.F.: An extended continuum model accounting for the drivers timid and aggressive attributions. Phys. Lett. A 381(15), 1302–1312 (2017)
Gupta, A.K., Redhu, P.: Analyses of the drivers anticipation effect in a new lattice hydrodynamic traffic flow model with passing. Nonlinear Dyn. 76(2), 1001–1011 (2014)
Redhu, P., Gupta, A.K.: The role of passing in a two-dimensional network. Nonlinear Dyn. 86(1), 389–399 (2016)
Wang, T., Zhang, J., Gao, Z., Zhang, W., Li, S.: Congested traffic patterns of two-lane lattice hydrodynamic model with on-ramp. Nonlinear Dyn. 88(2), 1345–1359 (2017)
Redhu, P., Gupta, A.K.: Phase transition in a two-dimensional triangular flow with consideration of optimal current difference effect. Nonlinear Dyn. 78(2), 957–968 (2014)
Willke, T.L., Tientrakool, P., Maxemchuk, N.F.: A survey of inter-vehicle communication protocols and their applications. IEEE Commun. Surv. Tutor. 11(2), 3–20 (2009)
Ge, H.X., Dai, S.Q., Xue, Y., Dong, L.Y.: Stabilization analysis and modified Kortewegde Vries equation in a cooperative driving system. Phys. Rev. E 71(6), 066119 (2005)
Wang, T., Gao, Z., Zhang, J.: Stabilization effect of multiple density difference in the lattice hydrodynamic model. Nonlinear Dyn. 73, 2197–2205 (2013)
Seiler, P., Pant, A., Hedrick, K.: Disturbance propagation in vehicle strings. IEEE Trans. Autom. Control. 49(10), 1835–1842 (2004)
Cook, P.A.: Conditions for string stability. Syst. Control Lett. 54(10), 991–998 (2005)
Ge, H.X., Cheng, R.J., Dai, S.Q.: KdV and kinkantikink solitons in car-following models. Phys. A: Stat. Mech. Appl. 357(3), 466–476 (2005)
Song, H., Ge, H.X., Chen, F.Z., Cheng, R.J.: TDGL and mKdV equations for car-following model considering traffic jerk and velocity difference. Nonlinear Dyn. 87(3), 1809–1817 (2017)
Liu, F.X., Cheng, R.J., Ge, H.X., Lo, S.M.: An improved car-following model considering the influence of optimal velocity for leading vehicle. Nonlinear Dyn. 85(3), 1469–1478 (2016)
Bando, M., Hasebe, K.: NakayamaA., Shibata A., Sugiyama Y.: Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 51(2), 1035–1042 (1995)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (Grant No. 61573075), the National Key R&D Program(Grant No.2016YFB0100904), the Major Innovation Project for the Key Industrial Generic Technologies of Chongqing (Grant No. cstc2015zdcy-ztzx60002), the Fundamental Research Funds for the Central Universities (Grant No. 106112014CDJZR178801), the Natural Science Foundation of Chongqing Science and Technology Commission (Grant No. cstc2016jcyjA2009), the China Postdoctoral Science Foundation Funded Project (Grant No. 2015M572450) and the Foundation for High-level Talents of Chongqing University of Art and Sciences (No. 2017RJD13).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sun, D., Liu, H. & Zhang, G. A new lattice hydrodynamic model with the consideration of flux change rate effect. Nonlinear Dyn 92, 351–358 (2018). https://doi.org/10.1007/s11071-018-4059-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-018-4059-7