
Abstract
In this paper, a new lattice hydrodynamic model (LH model) of traffic flow under consideration of reaction time of drivers and a corresponding feedback control scheme are proposed. Based on the model, stability analysis is conducted through linear stability analysis of transfer function. The obtained phase diagram indicates that the reaction time of driver can affect the instability region of traffic flow. Under the action of a feedback control, the unstable region is shrunken to reach suppressing jams. The numerical simulations are performed to validate the effect of reaction time of driver in the new LH model. The study results confirm that the reaction time of driver significantly affects the unstability of traffic system, and the feedback control can suppress traffic jams. Furthermore, it is found that the traffic system from the chaotic traffic state to periodic steady one is successfully realizing the control of traffic system.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In the last decade, traffic problems have attracted considerable attention in many metropolitan cities. Schollars and engineers have developed many traffic models such as the car-following model, the cellular automaton model, the gas kinetic model and the hydrodynamic model [1,2,3]. They all provide us with a good understanding of stop-and-go traffic from different points of view. A typical car-following model is the optimal velocity model(OV model) presented by Bando et al. [4]. Many improved OV models were proposed by considering some physical effects and /or traffic factors [5,6,7]. Among these, the lattice hydrodynamic model, which describes the interaction of two successive cars from the macroscopic view, has been extensively applied to investigate the characteristics of traffic flow in many aspects.
The lattice hydrodynamic model (LH model) is developed to represent the motion of vehicles following each other on a single lane. It can successfully describe the jamming transition of traffic flow in term of kink–antikink soliton density waves by deriving mKdV equation near the critical point via nonlinear stability analysis. Nagatani et al. [8, 9] were pioneers in the development of the lattice hydrodynamic model (LH model) of traffic flow in the early 1990s. Based on their works, many extended lattice hydrodynamic models by introducing important real effects and environmental parameters, such as the backward looking effect [10], two-lane traffic flow lattice model [11, 12], the driver’s delay effect [13, 14], the effect of interruption probability [15] and drivers anticipation effect [16] with passing, have been proposed. Ge et al. [10] considered the backward looking effect in the lattice hydrodynamic models and carried out the theoretical analysis and numerical simulation. The study confirmed the backward looking stable effect to some extent. Tang et al. [11] proposed the improved two-lane lattice hydrodynamic traffic model. Redhu and Gupta [12, 15,16,17,18,19,20,21] systematically studied jamming transitions, the effect of forward looking sites, the effect of interruption probability and the driver’s anticipation effect with passing, etc. in LH model of traffic flow. Peng [22, 23] studied the lateral effects of the lane width and considered the driver’s anticipation effect to induce the wide-moving jams. In refs of [13], Ge et al. derived TDGL equation in lattice hydrodynamic model by considering driver’s physical delay and confirmed the relation of traffic jams with phase transition of traffic flow. Kang et al. [14] proposed a new lattice hydrodynamic traffic flow model with explicit drivers’ physical delay and illustrated the drivers physical delay affects stability of traffic flow. Moreover, some LH models are extended to two-dimensional traffic flow and triangular flow [20, 21] by the consideration of optimal current difference effect and are applied to pedestrian traffic [24, 25]. However, the reaction times of drivers are an important factor contributing to traffic instabilities and, consequently, are an essential element in many traffic models [26]. In 2003, Davis [27] studied the effects of delay including the driver reaction time by performing simulations and analysis in detail. It is found that the stability of a platoon of vehicles is dependent on the platoon size as well as delay time, and the OV model displays an unrealistically strong sensitivity to delay. He demonstrated that realistic delay time \(t_{d}\) can be safely introduced in modifications of the OV model and the unphysical high-frequency oscillations in vehicle velocity are eliminated. In [28], Treiber et al. [28] systematically investigated the delay, inaccuracies and anticipation effects in microscopic traffic models. In 2008, Kesting and Treiber [29] further explored how reaction time, update time and adaptation time influence the dynamical behaviors and stability of traffic flow. They have found these times interplay with each other and effectively influence the longitudinal instability mechanisms for a platoon of vehicles. The long-wavelength string instability is mainly induced by the velocity adaptation time while short-wavelength local instabilities arise for sufficiently high reaction and update times. Orosz et al. [30, 31] studied the bifurcation phenomena and convergence effects with the consideration of reaction-time delay in OV model. Ngoduy [32] proposed a generalized multi-anticipative car-following model with time delays and accordingly carried out the linear stability analysis to derive the stability condition. His study indicates that the combination of different choices of multi-anticipations and time delays affects the instabilities of traffic flow with respect to a small perturbation. More recent years, Ngoduy [33] obtained a generalized linear stability condition for a second-order macroscopic model with time delay and investigate analytically the effect of such time delay on traffic instabilities from a macroscopic scale. His research has shown that the choice of the equilibrium speed function in a second-order macroscopic model will determine the stability of system by time delay.
At the same time, traffic control scheme in OV model and LH model causes many researcher’s concern. Konishi K etc. first introduced the delay-feedback control method in the coupled-map (CM) car-following model with the discrete-time OV model to achieve effective control for traffic jamming in [34, 35]. Motivated by the Konishi’s work, many control models have been developed by considering the different important real situations and control parameters [36,37,38,39,40]. Zhao and Gao [36] proposed a simple control model to suppress the traffic congestion in 2006. Jin and Hu [39] studied the stabilization of traffic flow in optimal velocity model via delayed-feedback control. In 2012, Ge et al. [37] presented a simple control method to suppress traffic jams for car-following model. In recent years, the delayed-feedback control theory is applied to the macroscopic model. In 2015, Ge et al. [38] proposed a control scheme to suppress of traffic jams by introducing the flow difference value between lattice position j and \(j+1\) at time t as the feedback gain in LH model. And then, Redhu and Gupta [40] introduced the flow difference value at time t and \(t-\tau \) downstream along lane as the feedback gain to propose the delayed-feedback control method in LH model. Zhang and Zhu [41] studied reduction of \(\mathrm{CO}_2\) emission for traffic system by introducing the delay-feedback control strategy. Moreover, the cooperative adaptive cruise control strategy of traffic is greatly developed in traffic model [42].
In this paper, we attempt to analyze the stability of traffic flow through a macroscopic lattice hydrodynamic traffic model by introducing driver’s reaction time \(t_{d}\) and suppress the traffic congestion using the feedback control method. The rest of the present paper is organized as follows. In Sect. 2, a new modified lattice hydrodynamic model considering the effect of driver reaction time is proposed. Stability analysis is carried out in Sect. 3. In Sect. 4, the suppression of traffic jamming by using the feedback control method is investigated based on the numerical simulation. The last section is devoted to a summary and the prospect of further study.
2 Model and the control method
In 1998, Nagatani [8] firstly proposed the lattice hydrodynamic traffic model as follows:
where \(q_j = \rho _j v_j\) is the flux of traffic; j indicate lattice position; \(\rho _j\) and \(v_j\), respectively, indicate the local density and velocity at position j at time t. \(a=1/\tau \) is the sensitivity of a driver; \(\rho _0\) is the average density; the optimal velocity function \(V(\rho )\) is adopted as
where \(V_{\max }\) indicate the maximal velocity, and \(\rho _c\) denote the safety critical density. In 2003, Davis [27] studied the effects of delay in the OV model of traffic dynamics and considered the introduction of driver reaction time \(t_{d}\) in modifications of the OV model can eliminate the defects with unphysical high-frequency oscillations in vehicle velocity. By incorporating Davis microscopic model and Nagatani macroscopic model, we propose the lattice hydrodynamic traffic model with driver reaction time \(t_{d}\) as follows:
where \(t_{d}\) is the reaction time of drivers.
We use the flow difference value between lattice position j and \(j+1\) at time t as the feedback control to eliminate traffic jams.
where k denotes feedback gain and ak denotes the coupling strength between flow upstream and downstream along direction of vehicle motion to keep consistent dimension in Eq. (7). For \(k=0\) and \(t_{d} =0\), the model is same as Nagatani’s model. When the traffic state is unstable, the feedback control term in Eq. (7) plays control role to eliminate instability in the system.
3 Linear stability analysis with control method
In this section, the linear stability analysis is carried out to investigate the effect of feedback control on suppressing the traffic jam. Assume that there exits the steady-state uniform flow solution \(\left[ {\rho _n ,q_n } \right] =\left[ {\rho ^{*}, q^{*}} \right] \) in the traffic flow system. The linearized equation of Eqs. (6) and (7) around steady state can be rewritten as follows:
By performing Laplace transformation, we have
where \(L(q_j^0 )=Q(s), L(\rho _j^0 )=P_j (s), L(\partial _t \rho _j^0) = sP_j (s)-\rho _j (0)\). The linearized equation from Eqs. (8) and (9) can be written as
where transfer function G(s) is \(\frac{-a\rho _0^2 \Gamma (\rho ^{*})+a\rho _0^2 \Gamma (\rho ^{*})t_d s+aks}{s^{2}-a\rho _0^2 \Gamma (\rho ^{*})+a\rho _0^2 \Gamma (\rho ^{*})t_d +as+aks}\) and d(s) is the characteristic polynomial which is \(s^{2}+as+aks-a\rho _0^2 \Gamma (\rho ^{*})+a\rho _0^2 \Gamma (\rho ^{*})t_d s\).
We set
Obviously, \(g(0)=1\), simplifying \(g(w)\le 1, w\in [0,\infty ]\), we obtain
The sufficient condition of Eq. (13) is \(2\rho _0^2 \Gamma (\rho ^{*})+a+2a(k+\rho _0^2 \Gamma (\rho ^{*})t_d )\ge 0\). The stability condition is obtained as \(a>-\frac{2\rho _0^2 \Gamma (\rho ^{*})}{1+2k+2\rho _0^2 \Gamma (\rho ^{*})t_d}\). If \(k = 0, t_d = 0\), the stability condition is same as one of Nagatani lattice model.
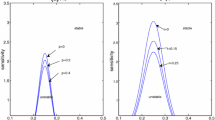
Figure 1 depicts the effect of feedback gain k and reaction time \(t_d\) on traffic flow. It can be clearly found that the amplitude of transfer function is declined with increase in feedback gain k, when \(t_{d}\) is determined. It indicates that the feedback control plays an important role on reducing and eliminating traffic jams. Additionally, it can be concluded that the traffic jams occurs more easily with increase in driver reaction time \(t_{d}\). Comparing the neutral stability lines in Fig. 2, the increase in driver reaction time \(t_{d}\) can obviously extend the unstable region, which is consistent with the occurrence of traffic jamming in real traffic situation. Due to the increase in driver reaction time, the free flow is blocked and the average velocity of whole traffic flow is decreased.

Bode-plot for different value of feedback gain k and reaction time \(t_{d}\)

Phase diagram in parameter space \((\rho , a)\)
Upon all the above analysis, the satisfied stable condition can be represented as follows:
The corresponding feedback gain is
Thus, the traffic can be effectively controlled by suppressing traffic jams in the traffic flow model.
According to Eq. (14), the neutral stable curves in the parameter space \((\rho ,a)\) are calculated and displayed in Fig. 2. Traffic flow remains steady state up the neutral stable curves. The area of unstable state expands with increase in reaction time \(t_{d}\). It indicates that response speed of drivers directly affect traffic flow on the roads. The region of steady state is enlarged by exerting control on lattice hydrodynamic model. Correspondingly, the sensitivity of driver response is enhanced and the relaxation time is decreased, traffic flow reaches its desire flux and velocity as soon as possible.

Temporal density change of four sites for the different reaction time \(t_{d}\) and \(k=0\)

Temporal density change of four sites for different reaction time \(t_{d}\) and \(k=0.3\)

Temporal density change of four sites for difference of the reaction time \(t_{d}\) and \(k=0.5\)

Temporal density change of four sites for different feedback gain k and reaction time \(t_{d}=0\)

Temporal density change of four sites for different feedback gain k and reaction time \(t_d =0.3\tau \)

Temporal density change of four sites for different feedback gain and k reaction time \(t_d =0.5\tau \)

Scatter plot at site-2 in the time range of 1–500 s for different feedback gain k at reaction time \(t_d =0.3\tau \)

Scatter plot at site-25 in the time range of 1–500 s for different feedback gain k at reaction time \(t_d =0.3\tau \)

Scatter plot at site-55 in the time range of 1–500 s for different feedback gain k at reaction time \(t_d =0.3\tau \)

Scatter plot at site-80 in the time range of 1–500 s for different feedback gain k at reaction time \(t_d =0.3\tau \)
4 Numerical simulation and analysis
In this section, we carry out the numerical simulations to validate the effect of the control method in the lattice hydrodynamic model. The circular road is composed of 140 discrete lattices under the periodic boundary. To realize the effect of feedback control on traffic dynamics, the corresponding parameters are chosen as: the safety density \(\rho _c =0.25\), the maximum velocity \(v_{\max } =2\), sensitive coefficient \(a=2.1\) and the initial density \(\rho _0 =0.25\). And assuming the density of sites from 50 to 55 is 0.5 and one in the range of site 56 to 60 is 0.2. By eliminating the velocity \(v_{j}\) in Eqs. (6) and (7), we yield the following evolution equation of density.
For \(k=0\) and \(t_{d}=0\), the model becomes Nagatani’s model.
At first, we study the effect of reaction time \(t_{d}\) on the lattice model with control signal. Figure 3 depicts the change of temporal density at different sites \(j=2\), 25, 55 and 80 for early time i.e. 1–200 s for \(t_d =0\) with the different feedback gain k. With the increase in feedback gain k, temporal density gradually evolves into stable state from unstable state.
Figure 3a–c, respectively, illustrate that the driver reaction time \(t_{d}\) gives rise to the instability of traffic on the road due to sharp oscillation of temporal density at four sites in case of no control signal. Traffic system does not need a long time to reach its desire flow and desire speed. Thus, it is possible to block traffic on the road. Accordingly, lowering traffic capacity causes traffic congestion. In Fig. 4a–c, the temporal density at four sites just has a small change under the action of control. Although traffic feedback control is exerted on traffic system, it needs a larger feedback gain k to attain the desire steady state with the increase in reaction time \(t_{d}\). In Fig. 5a–c, the temporal density at four sites has a less change under the action of a larger feedback control gain k. It is clearly observed that the strong feedback control gain k can expel unstable traffic system to reach the steady state. The final state indicates the traffic jams is successfully suppressed, which is confirmed by next discussions for the long-time effect of control and traffic patterns.
The long-time effect of control feedback gain on LH model is explored. The relationship between density and time is obtained in Figs. 6, 7 and 8. It displays the control ability with the different feedback gain in long time under the same condition of reaction time. Density-time plots in Figs. 6, 7 and 8, respectively, show the final situation of feedback control with different gain k in the time range of 20100–20300 s. It is clearly observed that the kink–antikink density waves in unstable region inducing by reaction time take shape in Figs. 6a, 7a and 8a. From Figs. 6a, 7a and 8a, we can see that the amplitude of density waves in unstable region oscillates sharply with higher value of driver reaction time. Feedback gain k takes an intermediate value in Figs. 6b, 7b and 8b. The oscillation amplitude of density waves in unstable region gradually decreases. With the increase in feedback gain k, density waves decays quickly and achieves the steady state in Figs. 6c, 7c and 8c. It implies that the traffic system can reach target steady state through the feedback control.
Furthermore, the scatter plots of density difference \(\rho _j (t)-\rho _j (t-1)\) against \(\rho _j (t)\) in phase space for different feedback gain k at reaction time \(t_d =0.3\tau \) are showed in Figs. 9, 10, 11 and 12, respectively. It can be found that the pattern without exerting control signal on LH model obviously exhibits chaotic behaviors in early time from 1s to 500s at sites-2,25,55,and 80,.respectively (see Figs. 9a, 10a, 11a, 12a). The periodic orbits are embedded in the chaotic pattern. It indicates that the state of traffic system in unstable region can jump from a periodic orbit to another and then forms chaotic pattern. In Figs. 9b, 10b, 11b and 12b, the traffic congestion is successfully suppressed through the comparison of density-time change. The traffic patterns at different sites, respectively, achieve a target steady state with a periodic orbit (limit cycle) under the action of exerting control signal on LH model. It also helps in understanding the formation of traffic congestion in the unstable state and controlling traffic system from the unstable state to steady one.
5 Conclusion
A new lattice hydrodynamic traffic model which takes the reaction time of drivers into account is proposed in this paper. The stability condition for the lattice hydrodynamic traffic model with the feedback control is derived through linear stability analysis. The phase diagram in parameter space \((\rho ,a)\) shows a larger unstable region. This result indicates that the larger reaction time of driver easily leads to instability of traffic flow. Conversely, the unstable region is shrunken under the action of the feedback control. The numerical simulations are performed to validate the effect of reaction time of driver and feedback control scheme in the lattice hydrodynamic model. The temporal density at four typical sites for the different reaction time is obtained. The results reveals that the reaction time of driver can significantly affect the instability region of traffic system, but the feedback control scheme and control strategy can effectively eliminate instability of traffic system and exhibits a high capability to efficiently remove traffic jams. Next, we will continue to explore high efficient and feasible control scheme to apply to real traffic.
References
Chowdhury, D., Santen, L., Schadschneider, A., Schreckenberg, M.: Statistical physics of vehicular traffic and some related systems. Phys. Rep. 329, 199–329 (2000)
Helbing, D.: Traffic and related self-driven many-particle systems. Rev. Mod. Phys. 73, 1067–1141 (2001)
Kerner, B.S.: The Physics of Traffic. Springer, Berlin (2004)
Bando, M., Hasebe, K., Nakayama, A.: Dynamical model of traffic congestion and numerical simulation. Phys. Rev. E 51, 1035–1042 (1995)
Nagatani, T.: The physics of traffic jams. Rep. Progr. Phys. 65, 1331–1386 (2002)
Tang, T.Q., Li, C.Y., Huang, H.J.: A new car-following model with the consideration of the driver’s forecast effect. Phys. Lett. A. 374, 3951–3956 (2010)
Tang, T.Q., Li, J.G., Yang, S.C., Shang, H.Y.: Effects of on-ramp on the fuel consumption of the vehicles on the main road under car-following model. Phys. A 419, 293–300 (2015)
Nagatani, T.: Modified KdV equation for jamming transition in the continuum models of traffic. Phys. A 261, 599–607 (1998)
Nagatani, T.: TDGL and MKdV equations for jamming transition in the lattice models of traffic. Phys. A 264, 581–592 (1999)
Ge, H.X., Cheng, R.J.: The “backward looking” effect in the lattice hydrodynamic model. Phys. A 387, 6952–6958 (2008)
Tang, T.Q., Huang, H.J., Xue, Y.: An improved two-lane traffic flow lattice model. Acta Phys. Sin. 55, 4026–4031 (2006). (in Chinese)
Gupta, A.K., Redhu, P.: Analyses of a modified two-lane lattice model by considering the density difference effect. Commun. Nonliear Sci. Numer. Simulat. 19, 1600–1610 (2014)
Ge, H.X., Zheng, P.J., Lo, S.M., Cheng, R.J.: TDGL equation in lattice hydrodynamic model considering driver’s physical delay. Nonlinear Dyn. 76, 441–445 (2014)
Kang, Y.R., Sun, D.H.: Lattice hydrodynamic traffic flow model with explicit drivers physical delay. Nonlinear Dyn. 71, 531–537 (2013)
Redhu, P., Gupta, A.K.: Jamming transitions and the effect of interruption probability in a lattice traffic flow model with passing. Phys. A 421, 249–260 (2014)
Gupta, A.K., Redhu, P.: Analyses of the driver’s anticipation effect in a new lattice hydrodynamic traffic flow model with passing. Nonlinear Dyn. 76, 1001–1011 (2014)
Gupta, A.K., Sharma, S., Redhu, P.: Effect of multi-phase optimal velocity function on jamming transition in a lattice hydrodynamic model with passing. Nonlinear Dyn. 80, 1091–1108 (2015)
Gupta, A.K., Sharma, S., Redhu, P.: Analyses of lattice traffic flow model on a gradient highway. Commun. Theor. Phys. 62, 393–404 (2014)
Redhu, P., Gupta, A.K.: Effect of forward looking sites on a multi-phase lattice hydrodynamic model. Phys. A. 445, 150–160 (2016)
Gupta, A.K., Redhu, P.: Jamming transition of a two-dimensional traffic dynamics with consideration of optimal current difference. Phys. Lett. A 377, 2027–2033 (2013)
Redhu, P., Gupta, A.K.: Phase transition in a two-dimensional triangular flow with consideration of optimal current difference effect. Nonlinear Dyn. 78, 957–968 (2014)
Peng, G.H., Cai, X.H., Cao, B.F., Liu, C.Q.: Non-lane-based lattice hydrodynamic model of traffic flow considering the lateral effects of the lane width. Phys. Lett. A 375, 2823–2827 (2011)
Peng, G.H.: A study of wide moving jams in a new lattice model of traffic flow with the consideration of the driver anticipation effect and numerical simulation. Phys. A 391, 5971–5977 (2012)
Tian, H.H., He, H.D., Wei, Y.F., Xue, Y., Lu, W.Z.: Lattice hydrodynamic model with bidirectional pedestrian flow. Phys. A 388, 2895–2902 (2009)
Xue, Y., Tian, H.H., He, H.D., Lu, W.Z., Wei, Y.F.: Jamming transitions and density wave in two-dimensional bidirectional pedestrian flow. Eur. Phys. J. B 69, 289–295 (2009)
May, A.D.: Traffic Flow Fundamentals. Prentice Hall, New York (1990)
Davis, L.C.: Modifications of the optimal velocity traffic model to include delay due to driver reaction time. Phys. A 319, 557–567 (2003)
Treiber, M., Kesting, A., Helbing, D.: Delays, inaccuracies and anticipation in microscopic traffic model. Phys. A 360, 71–88 (2006)
Kesting, A., Treiber, M.: How reaction time, update time, and adaptation time influence the stability of traffic flow. Comput. Aided Civ. Infrastruct. Eng. 23, 125–137 (2008)
Orosz, G., Wilson, R.E., Krauskopf, B.: Global bifurcation investigation of an optimal velocity traffic model with driver reaction time. Phys. Rev. E 70, 026207(1)–026207(10) (2004)
Orosz, G., Krauskopf, B., Wilson, R.E.: Bifurcations and multiple traffic jams in a car-following model with reaction-time delay. Phys. D 211, 277–293 (2005)
Ngoduy, D.: Generalized macroscopic traffic model with time delay. Nonlinear Dyn. 77, 289–296 (2014)
Ngoduy, D.: Linear stability of a generalized multi-anticipative car following model with time delays. Commun. Nonlinear Sci. Numer. Simul. 22, 420–426 (2015)
Konishi, K., Kokame, H., Hirata, K.: Coupled map car-following model and its delayed-feedback control. Phys. Rev. E 60, 4000–4007 (1999)
Konishi, K., Kokame, H., Hirata, K.: Decentralized delayed-feedback control of an optimal velocity traffic model. Eur. Phys. J. B 15, 715–722 (2000)
Zhao, X., Gao, Z.: A control method for congested traffic induced by bottlenecks in the coupled map car-following model. Phys. A 366, 513–522 (2006)
Ge, H.X., Yu, J., Lo, S.M.: A control method for congested traffic in the car-following model. Chin. Phys. Lett. 29, 050502-3 (2012)
Ge, H.X., Cui, Y., Zhu, K.Q., Cheng, R.J.: The control method for the lattice hydrodynamic model. Commun. Nonlinear. Sci. Numer. Simulat. 22, 903–908 (2015)
Jin, Y., Hu, H.: Stabilization of traffic flow in optimal velocity model via delayed-feedback control. Commun. Nonliear Sci. Numer. Simulat. 18, 1027–1034 (2013)
Redhu, P., Gupta, A.K.: Delayed-feedback control in a lattice hydrodynamic model. Commun. Nonlinear Sci. Numer. Simulat. 27, 263–270 (2015)
Zhang, L.D., Zhu, W.X.: Delay-feedback control strategy for reducing \({\rm CO}_2\) emission of traffic flow system. Phys. A 428, 481–491 (2015)
Shaowei, Y., Zhongke, S.: The effects of vehicular gap changes with memory on traffic flow in cooperative adaptive cruise control strategy. Phys. A 428, 206–223 (2015)
Acknowledgements
The project supported by the National Natural Science Foundation of China (Grant Nos. 11262003 and 11302125) and the Graduate Student Innovative Foundation of Guangxi Zhuang Autonomous Region (No. YCSZ2012013).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Xue, Y., Guo, Y., Shi, Y. et al. Feedback control for the lattice hydrodynamics model with drivers’ reaction time. Nonlinear Dyn 88, 145–156 (2017). https://doi.org/10.1007/s11071-016-3235-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3235-x