
Abstract
This paper focuses on the exponential synchronization of nonlinearly coupled Markovian jumping complex dynamical networks with stochastic perturbations under delayed impulsive controller. The Markovian jumping parameters are represented as a continuous-time, finite-state Markov chain. The impulsive control law is defined with both distributed as well as discrete time-varying delays. By designing the efficient impulsive control strategy and by using the Lyapunov method and Ito’s formula, some simple and easily realized adequate conditions that assure the exponential synchronization of considered complex dynamical networks are derived in mean square sense. Finally, some simulation results are granted to display the effects of the theoretical findings.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
A complex dynamical network (CDN) is composed of several coupled nodes combined by edges where each node characterizes a dynamical system. Most of the real-world systems such as Internet, metabolic system, telephone cell graphs, disease transmission networks and so on can be labeled as CDNs. Particularly, the synchronization phenomena in CDNs have earned growing attention among the research community and many efficient methodologies to clarify the synchronization problem of CDNs have been developed, see [1,2,3,4,5,6,7]. For example, synchronization problem of CDNs via pinning control under hybrid topologies has been analyzed in [1]. In [4], exponential synchronization problem for CDNs has been tackled with the help of pinning periodically intermittent control technique. The issue of synchronization for CDNs with similar nodes and coupling time delay has been addressed in [5]. Recently, in [6], authors have offered some new synchronization criteria for CDNs by making use of sampled-data feedback control. In CDNs, when signals are transmitted among subsystems, the propagation delays are unavoidable as a result of the finite speed of communication and limited bandwidth of the channels. Because of this cause, while designing mathematical models it is important to think about propagation delays, which are denoted as coupling delays.
In most of the previous studies on CDNs, the inner coupling is often assumed to be linear. However, considering many circumstances, this simplification does not match the real-world networks, and the interplay of nodes usually cannot be described accurately by linear functions. Specific examples are cellular neural networks in which the neurons are coupled by the linear combination of their nonlinear activation function. For nonlinear coupled networks, there only has been only litter theoretical work on synchronization in the literature [8,9,10]. Pinning outer synchronization problem for two delayed CDNs with nonlinear coupling has been examined in [8]. Pinning synchronization criteria for complex networks with nonlinear coupling and time-varying delays have been acquired in [9] by making use of M-matrix strategy. Global synchronization problem for CDNs with nonlinear coupling and information exchanges at discrete time has been considered in [10].
In [11] Krasovskii and Lidskii have initiated the Markovian jump systems, which can be regarded as a certain class of hybrid system with two components. This type of systems can be characterized by means of a set of linear systems with the transformations among models determined by a Markovian chain in a finite mode set, and it has applications in power system, modeling production system, network based control systems and so on. Additionally, owing to component failures or repairs, unpredictable natural changes, instant deviations of the working point of a nonlinear plant and interrelations, the transition from one state to the other habitually takes place in reference to certain probabilities, which is driven through a Markov chain. Thus, it is significant to consider Markovian jumping systems and there are many results available in the existing literature, see [12,13,14,15,16,17,18,19]. Authors in [12] have obtained the exponential synchronization criteria for Markovian jumping CDNs with randomly occurring parameter uncertainties. Exponential synchronization criteria for neural networks with Markovian jumping parameters and time-varying delays via sampled-data control has been developed in [16]. Delay dependent conditions that guarantee the exponential stability of Markovian jumping recurrent neural networks with proportional delays have been derived in [17]. Synchronization problem of randomly coupled neural networks with Markovian jumping parameters and time delays has been discussed in [20].
While signals are transmitted from one node to other, the state of the dynamical nodes typically depends on instantaneous disturbances and meets sudden changes because of the hasty environment. Owing to this reason, the communicated signals may not be entirely recognized by other subsystems and also there may be some information lag in the transmitted signals. This may cause some undesirable effects in the behavior of CDNs. In an aim to overcome this difficulty, while modeling CDNs stochastic perturbations are also taken into account. Passivity analysis of Markovian switching CDNs with multiple time-varying delays and stochastic perturbations has been investigated in [21]. Finite-time synchronization and identification of Markovian jumping CDNs with stochastic perturbations has been discussed in [22]. Synchronization criteria for T–S fuzzy CDNs with time-varying impulsive delays and stochastic effects have been reported in [23].
In practice, most of the dynamical networks cannot synchronize by itself, and in order to achieve synchronization, many control techniques have been developed which include pinning control, impulsive control, sampled-data control and so forth. Among these control schemes, impulsive control method has gained significant attention among researchers due to their widespread applications in many areas such as financial system, orbital transfer of satellites, ecosystem management and so on. The main advantage of impulsive control technique is that it performs only at discrete instants and thus, the control cost is reduced greatly. The existing literature has experienced many works that deals with impulsive synchronization of CDNs, see [24,25,26,27,28,29]. The problem of exponential synchronization of nonlinearly coupled CDNs with hybrid time-varying delays via impulsive control has been tackled in [24]. Synchronization problem of delayed CDNs with impulsive and stochastic effects has been discussed in [28]. In [29], authors have acquired impulsive synchronization criteria for T-S fuzzy memristor-based chaotic systems with parameter mismatches.
Along with, input delays are inevitable while the impulsive control signals are transmitted and observed in network environments. So, it is necessary to pay our attention on time delays when designing impulsive control law. Signal propagation may sometimes be instantaneous which can be described with discrete delays and such delay may also be distributed throughout some time interval. Due to this reason, in this paper we have designed the impulsive controller that includes distributed delay and discrete delay. Recently, authors in [30] have developed the pth moment exponential stochastic synchronization criteria for coupled memristor-based neural networks with discrete and distributed delays by using delayed impulsive control. Controllability of Boolean control networks with impulsive effects and forbidden states has been investigated in [31]. In [32], outer synchronization of partially coupled dynamical networks has been discussed by using the pinning impulsive controller. Exponential synchronization criteria for discontinuous chaotic systems via delayed impulsive control and its application to secure communication have been addressed in [33]. The problem of exponential synchronization of discontinuous neural networks with time-varying mixed delays via state feedback and impulsive control has been tackled in [34]. Finite-time synchronization problem for coupled networks with Markovian topology and distributed impulsive effects has been investigated in [35].
Inspired by the above revealed discussions, this paper investigates the synchronization of CDNs with nonlinear coupling and stochastic perturbations under impulsive controller. From the control point of view, impulsive control method is effective and robust in the research of stability analysis, since it needs only small control gains. Therefore, unlike other works, this paper employs impulsive controller with both discrete and distributed delays. By constructing an appropriate Lyapunov functional and by using Ito’s formula, sufficient criteria that ensure the synchronization of nonlinearly coupled CDNs with Markovian jumping and stochastic perturbations are derived. Finally, to verify the validity of the derived theoretical results, numerical simulations for real-world systems such as Chen system, Rossler system are provided.
The rest of this work is described as follows: Mathematical formulation of the problem and preliminaries which we have used to obtain the main results are given in Sect. 2. By making use of the delayed impulsive controller, exponential synchronization criteria for nonlinearly coupled Markovian jumping CDNs with stochastic perturbations have been developed in Sect. 3. In order to verify the derived results, some numerical simulations are offered in Sect. 4. Lastly, conclusions are given in Sect. 5.
2 Problem formulation
In this work, let us assume \(\{s(t),t\ge 0\}\) be a right continuous Markov chain on the probability space catching values in a finite space \({\mathbb {S}}=\{1,2,\ldots ,\bar{w}\}\) with generator \(\pi ={\pi _{kl}}_{\bar{w}\times \bar{w}}\) specified as
where \(\mathcal {B}>0\) and \(\lim _{\mathcal {B}(t)\rightarrow 0} O(\mathcal {B}(t)/\mathcal {B}(t))=0.\) Here \(\pi _{kl}\ge 0\) stands for the transition rate from k to l. If \(k\not =l\) then \(\pi _{kk}=\sum \nolimits _{k\not =l}\pi _{kl}.\)
Consider the Markovian jumping CDN consisting of L nonlinearly coupled identical nodes with stochastic perturbations as follows:
where \(z_i(t)=(z_{i1}(t),z_{i2}(t),\ldots , z_{in}(t))^T \in \mathbb {R}^n\) serve as the state variable of the i th node at time t; \(f(t,z_i(t),z_i(t-d_1(t)))=(f_1(t,z_i(t),z_i(t-d_1(t))), f_2(t,z_i(t),z_i(t-d_1(t))), \ldots , f_n(t,z_i(t),z_i(t-d_1(t))))^T \in \mathbb {R}^n\) represents a continuous vector-valued function; \(P(s(t))=(p_{ij}(s(t)))_{L\times L}\) and \(Q(s(t))=(q_{ij}(s(t)))_{L\times L}\) are the non-delayed and delayed outer linking matrix, respectively; If there is a relationship among node i and node \(j \ (i\not =j),\) \(p_{ij}(s(t))=p_{ji}(s(t))\not =0,\ q_{ij}(s(t))=q_{ji}(s(t))\not =0;\) otherwise \(p_{ij}(s(t))=p_{ji}(s(t))=0,\ q_{ij}(s(t))=q_{ji}(s(t))=0.\)
and
\(\varLambda (s(t))=\hbox {diag}\{\lambda _1(s(t)), \lambda _2(s(t)), \ldots , \ \lambda _n(s(t))\}>0\) is the inner linking positive matrix; \(g(z_i(t))=(g_1(z_{i1}(t)), g_2(z_{i2}(t)),\ \ldots , \ g_n(z_{in}(t)))^T\) and \(h(z_i(t-d_2(t)))= (h_1(z_{i1}(t-d_2(t))),h_2(z_{i2}(t-d_2(t))), \ldots , h_n(z_{in}(t-d_2(t))))^T\) represents the non-delayed inner coupling and delayed inner coupling vector functions, respectively. \(d_1(t)\) and \(d_2(t)\) are the time-varying delays satisfying \(0\le d_m(t)\le d_m,\) where \(d_m,\ m=1,2\) are constants; \(\omega (t)=(\omega _1(t), \omega _1(t), \ldots ,\omega _1(t))^T\) denotes n-dimensional Weiner process defined on \((\varOmega , \mathcal {F}, \{\mathcal {F}\}_{t\ge 0}, P). \theta :\mathbb {R}^+\times \mathbb {R}^n \times \mathbb {R}^n \rightarrow \mathbb {R}^{n\times n}\) is the noise intensity function matrix. The initial conditions of (1) are given by \(z_i(t)=\phi _i(t)\in L_{\mathcal {F}_0}^{P}[(-\infty ,0]; \mathbb {R}^n].\)
In an aim to accomplish synchronization of (1), the impulsive controller for the ith node is termed as
where \(z(t_k)=z_i(t_k^+)=\lim _{t\rightarrow t_k^+} z(t), z(t_k^-)=\lim _{t\rightarrow t_k^-}z(t)\) and \(U_{ik}(t_k^-)\in \mathbb {R}^n\) is the impulsive controller to be drawn. The impulsive instants \(t_k\) gratify \(0=t_0<t_1<t_2<\ldots<t_{k-1}<t_k<\cdots ,\ \lim _{k \rightarrow +\infty }t_k = +\infty .\) Let
In practice, when signals are transferred to the controlled system from the receiver, there might be some time delay. Due to this reason while designing the control law, it is essential to consider time delay. For this, we have designed the following impulsive controller with discrete and distributed delay:
where the time-varying delays \(\tau _i(t),\ i=1,2,\ldots , m+1\) satisfies \(0\le \tau _i(t)\le \tau _i,\) in which \(\tau _i\) are positive constants. In (4), \(\tau _1, \tau _2, \ldots , \tau _m\) denote the discrete delay and \(\tau _{m+1}\) stands for the distributed delay. It should be mentioned that the CDN (1) with a set \(\mathbb {S}\) consist of s different modes, and the sth mode performs when \(s(t)=s\in \mathbb {S}.\) For notation convenience, when \(s(t)=s\), we signify the matrix corresponding to the sth mode by \(\Delta (s)=\Delta (s(t)).\) Then, the error dynamical system can be written as
Assumption 1
[43] For any \(x_1,x_2\in \mathbb {R},\) there exist constants \(\eta _{1l}>0\) such that
for all \(l=1,2, \ldots ,n\).
Assumption 2
For any \(x_1,x_2\in \mathbb {R},\) assume \(h_l(\cdot )\ (l=1,2, \ldots ,n)\) are globally Lipschitz continuous functions, i.e., there exist positive constants \(\mu _{1l}>0\ (l=1,2, \ldots ,n)\) such that
for all \(l=1,2,\ldots ,n\) .
Assumption 3
In the networks (2), for \(z_i(t)\in \mathbb {R}^n,\) there exist constants \(w_{ls}(l,s=1,2,\ldots ,n)\) satisfying
Assumption 4
The noise intensity function \(\theta (\cdot )\) satisfies the uniform Lipschitz condition and there exist nonnegative constants m(s(t)) and n(s(t)) such that
Assumption 5
[30] There exist nonnegative constants \(u_{sk}, s=0,1,\ldots ,m+1,\) such that
where \(Q_{ik}(t_k^-)= Q_{ik}(r_{ij}(t_k^-),r_{ij}(t_k-\tau _1(t_k)),\ldots , r_{ij}(t_k-\tau _m(t_k)),\int _{t_k-\tau _{m+1}(t_k)}^{t_k} r_{ij}(s)\mathrm {d}s).\)
Definition 1
The CDN with stochastic perturbations (5) is said to be mean square globally exponentially synchronized, if there exist constants \(\alpha >1\) and \(\epsilon >0\) such that for any initial values
holds for \(t\ge 0\) where \(r_{ij}(t)=z_j(t)-z_i(t),\phi _i(t)=(\phi _{i1}(t),\phi _{i2}(t),\cdots ,\phi _{in}(t)),i=1,2,\ldots ,L,\) the norm \(\Vert r_{ij}(t)\Vert \) is the standard Euclidean norm.
Lemma 1
[30] Consider the following impulsive differential inequality:
where \(0\le d_j(t)\le d_j,p,q_i, a_k,b_k^j,h_i,d_j\) are constants and \(q_i,a_k,b_k^j,h_i,d_j\) are nonnegative, \(i=1,2,\ldots ,m, j=1,2,\ldots ,r,h=\max \{h_i,d_j,i=1,2,\ldots ,m,j=1,2, \cdots ,r\},w(t)\ge 0,[w(t)]_{\tau _i}=\sup _{t-h_i\le s\le t}w(s),[w(t_k)]_{d_j}=\sup _{t_k-d_j(t_k)\le s\le t_k}w(s),\phi (t)\) is continuous on \([t_0-h,t_0],\) and w(t) is continuous expect \(t_k,k\in \mathbb {N_+},\) where it has jump discontinuities. The sequence \(\{t_k\}\) satisfies \(0=t_0<t_1<t_2<\cdots<t_k<t_{k+1}<\cdots ,\) and \(\lim _{k\rightarrow +\infty }t_k=+\infty .\) Suppose that,
Then there exist constants \(\alpha >1\) and \(\epsilon >0\) such that
where \(\Vert \phi \Vert _{h}=\sup _{t_0-h\le s\le t_0} \Vert \phi (s)\Vert .\)
3 Main results
The main objective of this section is to design the delayed impulsive controller and to obtain some conditions which assures the exponential synchronization of (5).
Theorem 1
Assume that Assumptions 1–5 hold. Then the CDN (5) is said to be mean square exponentially synchronized under the impulsive controller (4) if there exist constants \(\nu>0, \upsilon >0\) and \(\rho >0\) such that specified inequalities are satisfied:
where \(u=\mathrm{diag}\{u_1,u_2,\ldots ,u_n\},a(s)=2M+\tilde{b}+\kappa +\tilde{m}(s),a=\max _{s\in \mathcal {S}}\{a(s)\},\ b(s)=\tilde{b}+\upsilon +\tilde{n}(s),b=\max _{s\in \mathcal {S}}\{b(s)\}, M_m=\sum \limits _{m=1}^{N}(\alpha _{mw}\nu )^2, M=\max \limits _{1\le m\le n}\{M_m\}, \eta _1=\min \limits _{1\le l\le n }\{\eta _{1l}\}, \mu _1=\min \limits _{1\le l\le n }\{\mu _{1l}\}, \nu >0,\tilde{b}=\frac{n}{\nu ^2},\tilde{n}=\max _{s\in \mathcal {S}}\{\tilde{n}(s)\}, 0<\rho _s\le 1. \)
Proof
Consider the Markovian switching Lyapunov function
By using Ito’s formula and calculating the time derivative of \(\mathcal {V}(t)\) along the trajectory of the system (5), one can attain for any \(k\in \mathbb {N},\)
With Assumption 3, and inequality \(pq\le |pq|\le \frac{1}{2}[(p\nu )^2+(\frac{q}{\nu })^2]\), the first term of (13) can be rewritten as
By means of Assumption 1, we have
By making use of Assumption 2, and inequality \(pq\le |p||q| \le \frac{1}{2}[(\rho p)^2+(\frac{q}{\rho })^2],\) we can get
As reported in Assumption 4,
From (13)–(17), conditions (8) and (9), one can obtain
Taking expectation on both sides of (18), we can get
If \(t=t_k, k\in \mathbb {N}\), one can observe from Lemma 1, Assumption 5 and the second equation of (5) that

which is pursued by
Therefore, there exist constants \(\alpha >1\) and \(\epsilon >0\) such that, for any initial values ,
holds for \(t\ge t_0\). As stated in Definition 1, CDNs (5) is mean square globally exponentially synchronized. \(\square \)
Remark 1
When the stochastic perturbations are not taken into account, system (2) can be written as
In this case, one can attain the following result.
Corollary 1
Suppose that Assumptions 1–5 hold. Then the CDN (22) is said to be mean square exponentially synchronized under the impulsive controller (4) if there exist constants \(\nu>0, \upsilon >0\) and \(\rho >0\) such that specified inequalities are satisfied:
where \(u=\mathrm{diag}\{u_1,u_2,\ldots ,u_n\},a(s)=2M+\tilde{b}+\kappa ,a=\max _{s\in \mathcal {S}}\{a(s)\}, b(s)=\tilde{b}+\upsilon , b=\max _{s\in \mathcal {S}}\{b(s)\}, M_m=\sum \limits _{m=1}^{L}(\alpha _{mw}\nu )^2, M=\max \limits _{1\le m\le n}\{M_m\}, \eta _1=\min \limits _{1\le l\le n }\{\eta _{1l}\}, \mu _1=\min \limits _{1\le l\le n }\{\mu _{1l}\}, \nu >0,\tilde{b}=\frac{n}{\nu ^2}, 0<\rho _s\le 1. \)
Remark 2
It should be stated that, if the Markov chain \(\{s(t), t\ge 0\}\) takes only one value, that is \(\mathbb {S}=\{1\}\), CDN (2) will turn out to be the successive one:
Then one can attain the following Corollary.
Corollary 2
Suppose that Assumptions 1–5 hold. Then the CDN (28) is said to be mean square exponentially synchronized under the impulsive controller (4) if there exist constants \(\nu>0, \upsilon >0\) and \(\rho >0\) such that specified inequalities are satisfied:
where \(u=\hbox {diag}\{u_1,u_2,\ldots ,u_n\},a=2M+\tilde{b}+\kappa +\tilde{m} , b=\tilde{b}+\upsilon +\tilde{n}, M_m=\sum \nolimits _{m=1}^{L}(\alpha _{mw}\nu )^2, \nu >0,\tilde{b}=\frac{n}{\nu ^2}. \)
Remark 3
If we neglect the distributed delay from (4), then one can acquire the impulsive rule as:
where \(\tau _i(t),i=1,2,\ldots ,m\) are defined as in (4). Just as Assumption 4, we present the following Assumption:
There exist nonnegative constants \(u_{sk},s=0,1,\ldots ,m+1,\) such that
where \(Q_{ik}(t_k^-)= Q_{ik}(r_{ij}(t_k^-),r_{ij}(t_k-\tau _1(t_k)),\cdots ,r_{ij}(t_k-\tau _m(t_k))).\)
The following result can be obtained easily from Theorem 1.
Corollary 3
Assume that Assumptions 1–5 hold. Then the CDN (5) is said to be mean square exponentially synchronized under the impulsive controller (33) if there exist constants \(\nu>0, \upsilon >0\) and \(\rho >0\) such that specified inequalities are satisfied:
where \(u=\hbox {diag}\{u_1,u_2,\cdots ,u_n\},a(s)=2M+\tilde{b}+\kappa +\tilde{m}(s),a=\max _{s\in \mathcal {S}}\{a(s)\}, b(s)=\tilde{b}+\upsilon +\tilde{n}(s), b=\max _{s\in \mathcal {S}}\{b(s)\}, M_m=\sum \limits _{m=1}^{L}(\alpha _{mw}\nu )^2, M=\max \limits _{1\le m\le n}\{M_m\}, \eta _1=\min \limits _{1\le l\le n }\{\eta _{1l}\}, \mu _1=\min \limits _{1\le l\le n }\{\mu _{1l}\},\nu >0,\tilde{b}=\frac{n}{\nu ^2},\tilde{n}=\max _{s\in \mathcal {S}}\{\tilde{n}(s)\}, 0<\rho _s\le 1.\)
Remark 4
In Theorem 1, the impulsive part contains distributed delay as well as discrete delay. From the inequalities (10) and (11), one can see that the derived result is not associated with the value of the discrete delay although it relies upon the value of the distributed delay. When \(0\le \tau _{m+1}<1,\) the distributed delay performs a positive role in synchronization process. If \( \tau _{m+1}>1,\) then distributed delay performs a negative role in synchronization process. When \(\tau _{m+1}=1,\) the role of the distributed delay and discrete delay are similar.
Remark 5
In most of the existing works, it is assumed that the coupling between the state variables of CDNs is linear. For example, in [36], authors have inspected the synchronization problem of linearly coupled CDNs. In [37, 38], synchronization problem for CDNs has been tackled with the help of impulsive controller without time delay. However, in most of the real life problems the coupling scheme is nonlinear. Besides, since time delays are unavoidable while signals are communicated from the receiver to the system, it is significant to consider time delays in the controller. In this paper, we have considered the CDNs with nonlinear coupling and also the controller has been designed with discrete and distributed delays.
4 Numerical example
In this part, some numerical simulations are given to certify the above mentioned results.
Example 1
Consider the node dynamics of three dimensional Chen system as
where \(a_1=35,a_2=-7,a_3=28\) and \(a_4=3.\) Let the non-delayed coupling matrices
and the delayed coupling matrices
The transition probability matrix and system parameters are described as follows:
Nonlinear coupling functions \(g(z_i(t))\) and \(h(z_i(t-d_2(t)))\) are represented as \(g(z_i(t))=(z_{i1}(t)+0.005\sin z_{i1}(t), z_{i2}(t)+0.005\sin z_{i2}(t),z_{i3}(t)+0.005\sin z_{i3}(t))\) and \(h(z_i(t-d_2(t)))=(\sin z_{i1}(t-d_2(t)), \sin z_{i2}(t-d_2(t)), \sin z_{i3}(t-d_2(t))), d_2(t)=0.01 \hbox {e}^t/(1+\hbox {e}^t);\) then one can easily derive that \(\eta _1=0.995,\mu _1=1.1.\) Choose
\(\nu =0.25,\kappa =20, \upsilon =50,\rho =10,\tilde{m}(1)=0.8,\tilde{n}(1)=0.5,\tilde{m}(2)=0.6,\tilde{n}(2)=0.9, \rho _1=0.99\) and \(\rho _2=0.8\). With the above parameters one can easily obtain that \(M=7.0156, ,a=82.8312,b=98.9.\) From this, we can easily verify the first two conditions of theorem 1 . Let the impulsive function \(Q_{ik}(t_k^-)\) in (4) be the following simple form
with positive constants \(\beta _i, i=1,2,3.\) when \(\beta _1=0.5,\beta _2=0.2,\beta _3=0.3, t_k-t_{k-1}=0.0028,\) we get \(\theta _k=0.365<1\) and
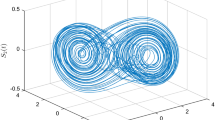
From Theorem 1, we can conclude that CDN (5) with impulsive controller (4) is exponentially synchronized. The chaotic attractor of the Chen system and state trajectories of the error system (5) under the controller (41) are given in Fig. 2. Figure 1 describes the network topology of the CDN. The time response curve of \(log(||r_{ij}(t)||)\), trajectories of Markov chain and impulsive instants are given in Figs. 3 and 4, respectively.

Network topology of the CDN in Example 1

Chen chaotic attractor and time responses of the error system (5)

Time response of \(log(||r_{ij}(t)||)\)

Markov chain and impulsive sequence in Example 1
Remark 6
Algorithm (time-delayed ODE):
-
Step 1: Discretize the time axes of system.
-
Step 2: Choose the time step h, Starting time, End time.
-
Step 3: Find \(N_0=\)Starting time\(/h; N=\)end time / h;
-
Step 4: for \(i: N+1\)
-
if \(i<=N_0+1\)
-
Define the initial conditions
-
else
-
Define the delay values
-
Update the system with control protocol
-
end if
-
end for
-
-
Step 5: plot the trajectories using plot command.
Example 2
Consider a single Rossler oscillator described by the following dimensionless form as
where \(c_1=0.2,c_2=0.2,c_3=5.7.\) The non-delayed and delayed coupling matrices are taken as
The system parameters \(\varLambda (1), \varLambda (2),\) nonlinear coupling functions \(g(z_i(t))\) and \(h(z_i(t-d_2(t)))\) and the transition matrix \(\varPi \) are taken as in Example 1. Select
It is easy to obtain that \(M=4.6025, \eta _1=0.995, \mu _1=1.1, \kappa =20, \upsilon =50,\rho =10,\tilde{m}(1)=0.5,\tilde{n}(1)=0.6,\tilde{m}(2)=0.2,\tilde{n}(2)=0.3,a=77.705,b=98.6.\) Consider the impulsive function \(Q_{ik}(t_k^-)\) in (4) as follows:
with positive constants \(\beta _i, i=1,2,3.\) when \(\beta _1=0.1,\beta _2=0.2,\beta _3=0.2, t_k-t_{k-1}=0.002,\) we get \(\theta _k=0.1<1\) and
One can easily verify the hypotheses (i) and (ii) of Theorem 1 with \(\rho _1=0.99\) and \(\rho _2=0.8\). With the statement of Theorem 1, CDN (5) with impulsive controller (4) is exponentially synchronized. Figure 6, depicts the chaotic attractor of Rossler system and time responses of the error system. The topological structure of the complex network is described by Fig. 5. Figure 7 describes the time response curve of \(log(||r_{ij}(t)||)\) and the impulsive instants are shown in Fig. 8.

Network topology of the CDN in Example 2

Chaotic attractor of Rossler system and time responses of the error system (5)

Time response of \(log(||r_{ij}(t)||)\)

Impulsive sequence in Example 2
Example 3
Consider the following CDN as
The nonlinear function is defined as
The system parameters are all defined as in Example 1. Choose the impulsive function \(Q_{ik}(t_k^-)\) in (4) as,
with positive constants \(\beta _i, i=1,2,3.\) when \(\beta _1=0.2,\beta _2=0.3,\beta _3=0.2, t_k-t_{k-1}=0.0025,\) we get \(\theta _k=0.18<1\) and
with this we can conclude that (28) is exponentially synchronized under the impulsive controller (4). Figure 9, represents the state responses of the error system(28). Figures 10 and 11 describe the time response curve of \(log(||r_{ij}(t)||)\) and impulsive instants respectively.

State responses of the error system (28)

Time response of \(log(||r_{ij}(t)||)\)

Impulsive sequence in Example 3
Example 4
Consider the following Markovian jumping CDN as
The nonlinear function is defined as
The system parameters are all defined as in Example 1.

Time responses of the error system (5)

Time response of \(log(||r_{ij}(t)||)\)

Impulsive sequence in Example 4
The impulsive function \(Q_{ik}(t_k^-)\) in (33) is designed as,
with positive constants \(\beta _i, i=1,2,3.\) when \(\beta _1=0.2,\beta _2=0.3, t_k-t_{k-1}=0.0023,\) we get \(\theta _k=0.13<1\) and
with this we can conclude that (5) is exponentially synchronized under the impulsive controller (33). Figure 12 represents the time responses of the error system (5). In Fig. 13, time response curve of \(log(||r_{ij}(t)||)\) is given, and Fig. 14 describes the impulsive instants.
Remark 7
In order to validate the theoretical results obtained in this paper, four numerical examples with simulations that show the synchronization of CDNs (5) under delayed impulsive controller are presented. Examples 1 and 2 consider Chen system and Rossler system, respectively, and it can be clearly seen from Figs. 2 and 4 that the trajectories of system (28) tend to zero as time elapses. Figure 5 monitors the synchronization of CDNs (5) without Markovian jumping parameters, and Fig. 6 displays the synchronization of CDNs (5) under impulsive controller without distributed delay.
5 Conclusions
In this paper, the exponential synchronization problem of nonlinearly coupled CDNs with Markovian jumping parameters and stochastic perturbations has been discussed with the help of impulsive controller. It should be mentioned that the considered controller is a more general one and that contains both discrete and distributed time-varying delays. By utilizing Lyapunov method and Ito formula, some adequate conditions that certify the exponential synchronization of CDNs have been investigated with the help of delayed impulsive controller. Finally, numerical simulations are presented to show the efficacy of the derived criteria.
In practice, controlling all nodes is quite difficult and even inapplicable, especially when network is composed of a large set of high dimensional nodes. Hinted by this practical consideration, pinning control, which means that only a small fraction of nodes is directly controlled, has been proposed [39, 40]. Along with, intermittent control, as a discontinuous control strategy in engineering fields, has been employed to realize synchronization of complex dynamical networks [41, 42]. In an aim to save the control cost and amount of transmitted information effectively, we will discuss the synchronization criteria for CDNs with pinning impulsive control, pinning intermittent control in our future works.
References
Yu, R., Zhang, H., Wang, Z., Wang, J.: Synchronization of complex dynamical networks via pinning scheme design under hybrid topologies. Neurocomputing. (2016). doi:10.1016/j.neucom.2016.05.086i
Rakkiyappan, R., Sivaranjani, K.: Sampled-data synchronization and state estimation for nonlinear singularly perturbed complex networks with time-delays. Nonlinear Dyn. 84, 1623–1636 (2016)
Zhou, J., Wang, Z., Wang, Y., Kong, Q.: Synchronization in complex dynamical networks with interval time-varying coupling delays. Nonlinear Dyn. 72, 377–388 (2013)
Cai, S., Hao, J., He, Q., Liu, Z.: Exponential synchronization of complex delayed dynamical networks via pinning periodically intermittent control. Phys. Lett. A 375, 1965–1971 (2011)
Fan, Y.Q., Wang, Y.H., Zhang, Y., Wang, Q.R.: The synchronization of complex dynamical networks with similar nodes and coupling time-delay. Appl. Math. Comput. 219, 6719–6728 (2013)
Chen, Z., Shi, K., Zhong, S.: New synchronization criteria for complex delayed dynamical networks with sampled-data feedback control. ISA Trans. (2016). doi:10.1016/j.isatra.2016.03.018i
Koo, J.H., Ji, D.H., Won, S.C.: Synchronization of singular complex dynamical networks with time-varying delays. Appl. Math. Comput. 217, 3916–3923 (2010)
Ma, X.H., Wang, J.A.: Pinning outer synchronization between two delayed complex networks with nonlinear coupling via adaptive periodically intermittent control. Neurocomputing 199, 197–203 (2016)
Wang, J., Feng, J., Xu, C., Zhao, Y., Feng, J.: Pinning synchronization of nonlinearly coupled complex networks with time-varying delays using M-matrix strategies. Neurocomputing 177, 89–97 (2016)
Tang, Z., Feng, J., Zhao, Y.: Global synchronization of nonlinear coupled complex dynamical networks with information exchanges at discrete-time. Neurocomputing 151, 1486–1494 (2015)
Krasovskii, N.N., Lidskii, E.A.: Analysis and design of controllers in systems with random attributes. Autom. Remote Control 22, 1021–1025 (1961)
Zhou, W., Dai, A., Yang, J., Liu, H., Liu, X.: Exponential synchronization of Markovian jumping complex dynamical networks with randomly occurring parameter uncertainties. Nonlinear Dyn. 78, 15–27 (2014)
Ma, Y., Zheng, Y.: Synchronization of continuous-time Markovian jumping singular complex networks with mixed mode-dependent time delays. Neurocomputing 156, 52–59 (2015)
Sivaranjani, K., Rakkiyappan, R.: Pinning sampled-data synchronization of complex dynamical networks with Markovian jumping and mixed delays using multiple integral approach. Complexity 21, 622–632 (2016)
Wang, A., Dong, T., Liao, X.: Event-triggered synchronization strategy for complex dynamical networks with the Markovian switching topologies. Neural Net. 74, 52–57 (2016)
Rakkiyappan, R., Chandrasekar, A., Park, J.H., Kwon, O.M.: Exponential synchronization criteria for Markovian jumping neural networks with time-varying delays and sampled-data control. Nonlinear Anal. Hybrid Syst. 14, 16–37 (2014)
Zhou, L.: Delay-dependent exponential stability of recurrent neural networks with Markovian jumping parameters and proportional delays. Neural Comput. Appl. (2016). doi:10.1007/s00521-016-2370-0
Xiong, L., Zhang, H., Li, Y., Liu, Z.: Improved stability and \(H_{\infty }\) performance for neutral system with uncertain Markovian jump. Nonlinear Anal. Hybrid Syst. 19, 13–25 (2016)
Yang, X., Cao, J., Lu, J.: Synchronization of Markovian coupled neural networks with nonidentical node-delays and random coupling strengths. IEEE Trans. Neural Netw. Learn. Syst. 23, 60–71 (2012)
Yang, X., Cao, J., Lu, J.: Synchronization of randomly coupled neural networks with Markovian jumping and time-delay. IEEE Trans. Circuits Syst. I Reg. Pap. 60, 363–376 (2013)
Ye, Z., Ji, H., Zhang, H.: Passivity analysis of Markovian switching complex dynamic networks with multiple time-varying delays and stochastic perturbations. Chaos Soliton. Fract. 83, 147–157 (2016)
Xie, Q., Si, G., Zhang, Y., Yuan, Y., Yao, R.: Finite-time synchronization and identification of complex delayed networks with Markovian jumping parameters and stochastic perturbations. Chaos Soliton. Fract. 86, 35–49 (2016)
Yang, X., Yang, Z.: Synchronization of T-S fuzzy complex dynamical networks with time-varying impulsive delays and stochastic effects. Fuzzy Set. Syst. 235, 25–43 (2014)
Feng, J., Yu, F., Zhao, Y.: Exponential synchronization of nonlinearly coupled complex networks with hybrid time-varying delays via impulsive control. Nonlinear Dyn. (2016). doi:10.1007/s11071-016-2711-7
Chen, W.H., Jiang, Z., Lu, X., Luo, S.: \(H_{\infty }\) synchronization for complex dynamical networks with coupling delays using distributed impulsive control. Nonlinear Anal. Hybrid Syst. 17, 111–127 (2015)
Chen, W.H., Wei, D., Lu, X.: Global exponential synchronization of nonlinear time-delay Lure’s systems via delayed impulsive control. Commun. Nonlinear Sci. Numer. Simul. 19, 3298–3312 (2014)
He, G., Fang, J., Li, Z.: Synchronization of hybrid impulsive and switching dynamical networks with delayed impulses. Nonlinear Dyn. 83, 187–199 (2016)
Yang, X., Cao, J., Lu, J.: Synchronization of delayed complex dynamical networks with impulsive and stochastic effects. Nonlinear Anal. Real World Appl. 12, 2252–2266 (2011)
Yang, S., Li, C., Huang, T.: Impulsive synchronization of T-S fuzzy model of memristor-based choatic systems with parameter mismatches. Int. J. Control Autom. Syst. 14, 854–864 (2016)
Yang, X., Cao, J., Qiu, J.: \(p\) th moment exponential stochastic synchronization of coupled memristor-based neural networks with mixed delays via delayed impulsive control. Neural Net. 65, 80–91 (2015)
Liu, Y., Chen, H., Wu, B.: Controllability of Boolean control networks with impulsive effects and forbidden states. Math. Meth. Appl. Sci. 37, 1–9 (2014)
Lu, J., Ding, C., Lou, J., Cao, J.: Outer synchronization of partially coupled dynamical networks via pinning impulsive controllers. J. Franklin Inst. 352, 5024–5041 (2015)
Yang, X., Yang, Z., Nie, X.: Exponential synchronization of discontinuous chaotic systems via delayed impulsive control and its application to secure communication. Commun. Nonlinear Sci. Numer. Simul. 19, 1529–1543 (2014)
Yang, X., Cao, J., Ho, D.: Exponential synchronization of discontinuous neural networks with time-varying mixed delays via state feedback and impulsive control. Cogn. Neurodyn. 9, 113–128 (2015)
Yang, X., Lu, J.: Finite-time synchronization of coupled networks with Markovian topology and impulsive effects. IEEE Trans. Autom. Control (2015). doi:10.1109/TAC.2015.2484328
Han, M., Zhang, Y.: Complex function projective synchronization in drive-response complex-variable dynamical networks with coupling time delays. J. Franklin Inst. 353, 1742–1758 (2016)
Zhou, J., Wu, Q., Xiang, L., Cai, S., Liu, Z.: Impulsive synchronization seeking in general complex delayed dynamical networks. Nonlinear Anal. Hybrid Syst. 5, 513–524 (2011)
Xie, C., Xu, Y., Tong, D.: Synchronization of time varying delayed complex networks via impulsive control. Optik 125, 3781–3787 (2014)
Gong, D., Lewis, F.L., Wang, L., Xua, K.: Synchronization for an array of neural networks with hybrid coupling by a novel pinning control strategy. Neural Net. 77, 41–50 (2016)
Liu, X., Xu, Y.: Cluster synchronization in complex networks of non identical dynamical systems via pinning control. Neurocomputing 168, 260–268 (2015)
Fan, Y., Liu, H., Zhu, Y., Mei, J.: Fast synchronization of complex dynamical networks with time-varying delay via periodically intermittent control. Neurocomputing 205, 182–194 (2016)
Zhang, Z., He, Y., Zhang, C., Wu, M.: Exponential stabilization of neural networks with time-varying delay by periodically intermittent control. Neurocomputing 207, 469–475 (2016)
Wang, Y., Cao, J.: Cluster synchronization in nonlinearly coupled delayed networks of non-identical dynamic systems. Nonlinear Anal. Real World Appl. 14, 842–851 (2013)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sivaranjani, K., Rakkiyappan, R. Delayed impulsive synchronization of nonlinearly coupled Markovian jumping complex dynamical networks with stochastic perturbations. Nonlinear Dyn 88, 1917–1934 (2017). https://doi.org/10.1007/s11071-017-3353-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3353-0