
Abstract
This paper revisits the exponential synchronization problem of two identical reaction–diffusion neural networks with Dirichlet boundary conditions and mixed delays via periodically intermittent control. The focus is on developing a new Lyapunov–Razumikhin method such that the overdesign that stems from the existing Lyapunov functional method can be reduced. The novelty of the proposed Lyapunov–Razumikhin method is the ability to provide better estimates on the state variables of the synchronization error system and impose no restriction on delay derivatives. By exploring the reaction–diffusion effect using the extended Wirtinger’s inequality, an improved result on intermittent synchronization is derived. The problem of designing optimal intermittent synchronization controllers is addressed, and an easily computable method to determine the controller gain with minimal norm is presented. Finally, two illustrative examples are presented to show the validity of the obtained results and the superiority over the existing ones.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Nowadays, artificial neural networks are being widely applied to a lot of fields, such as image analysis, signal processing, pattern recognition, associative memory, optimization, cryptography, and model identification. These applications rely crucially on the dynamical properties of the designed neural networks. For this reason, the study of dynamical properties of neural networks has attracted much interest. Most previous studies have largely concentrated on the neural networks modeled by ordinary differential equations (ODEs) [1–5] in which the neurons are assumed to be evenly distributed. These ODE models ignore both the spatial detail and the diffusing behavior observed in natural and artificial neural networks. In fact, in implementation of neural networks, the electrons transportation through a nonuniform electromagnetic field generally produces the diffusion phenomena. Therefore, it is necessary to introduce the reaction–diffusion terms in neural network models for achieving good approximation of the spatiotemporal actions and interactions of real-world neurons. The reaction–diffusion neural networks can be modeled by partial differential equations (PDEs) of diffusion type. It is worth mentioning that the PDEs describing the reaction–diffusion neural networks cause some difficulties, since both existence and qualitative properties of the solutions are more difficult to be established. In recent years, the problems of stability, periodicity, and Hopf bifurcation for reaction–diffusion neural networks have been addressed, and several important results have been reported, see [6–12] and the references therein.
On the other hand, a large attention has been taken to the research on collective behaviors of coupled oscillators. A review about collective behaviors of coupled neurons and pattern transition can be found in [13]. In [14], the emergence of emitting wave induced by autapse (in electrical type) with negative feedback was investigated. In [15], collision between emitting waves from different local areas driven by electric autapses under different time delays was observed. As the major collective behavior, synchronization of coupled oscillators has been observed in physical, biological, and social systems. In particular, synchronization of chaotic dynamics has attracted significant research interest during the last decades due to its important role in understanding the synchronization mechanism of coupled nonlinear systems [16, 17] and its potential applications in various engineering fields [18, 19]. In [20], a general method for synchronizing coupled PDEs with spatiotemporal chaotic dynamics was described. Meanwhile, several control strategies have been proposed to synchronize coupled reaction–diffusion neural networks. In [21–23], complete synchronization of coupled delayed reaction–diffusion neural networks was studied, in which continuous linear state-feedback control was suggested. In [24, 25], adaptive control was used to synchronize the coupled reaction–diffusion neural networks with delays. In [26], the synchronization problem for reaction–diffusion neural networks was investigated under the stochastic sampled-data control.
Recently, the discontinuous feedback synchronization schemes, including impulsive synchronization [27–29] and intermittent synchronization [30–32], have been applied to synchronization problem of coupled reaction–diffusion neural networks. Compared with continuous feedback synchronization, these discontinuous feedback synchronization schemes can efficiently reduce bandwidth usage due to the decreased amount of synchronization information transmitted from the drive system to the response system, so they are practical and effective in many areas, especially for secure communications systems. Note that in the impulsive synchronization framework, the updates given to the state of the response system are performed in instantaneous fashion. But with intermittent synchronization, the response system is kept in update mode for nonzero time intervals. So, intermittent synchronization fills the gap between the two extremes of continuous and impulsive synchronization and thus can give more flexibility to the designer. Intermittent stabilization and synchronization for delayed neural networks governed by ODEs have been studied in [33–42]. In [30], for the first time, periodically intermittent synchronization for two identical reaction–diffusion neural networks with mixed delays was developed. Using exponential-type Lyapunov functionals, sufficient conditions for exponential synchronization were derived. By considering stochastic disturbance, similar work concerning intermittent synchronization of delayed stochastic neural networks with reaction–diffusion terms can be found in [31, 32]. It should be pointed out that the intermittently controlled time-delay system is a switched time-delay system in which a stable mode and an unstable mode run alternately, and thus, its stability depends on whether the decay degree of the stable mode can suppress the growth degree of the unstable mode. Therefore, the accuracy of estimating the decay/growth rate of solutions of the stable/unstable mode affects the conservatism of the derived synchronization criterion seriously. The exponential estimates presented in [30–32] were performed by means of quadratic Lyapunov functionals. Due to the finiteness of the activation intervals, the quadratic integral terms in these Lyapunov functionals may lead to overdesign in estimating the decay/growth rate of solutions of the stable/unstable mode, which brings some conservatism. Moreover, applying the quadratic integra terms for handling the delayed terms of the state equation imposes strict restriction on delay derivative, which, in turn, limits the application scope of the derived results. The above observations indicate that the developed intermittent synchronization conditions for coupled delayed reaction–diffusion neural networks are, however, too restrictive for some applications. One will naturally raise a question: Whether the conservatism of these intermittent synchronization conditions could be further reduced if we adopt Lyapunov–Razumikhin technique other than Lyapunov functional method as described in [30–32]?
In this paper, motivated by the above observations, we propose a Lyapunov–Razumikhin method for intermittent synchronization analysis of coupled reaction–diffusion neural networks with mixed delays. By developing a Razumikhin technique for exploring the effect of the relation between the delay and the control width on the dynamical behavior of the synchronization error system, a less conservative criterion for intermittent synchronization without any restriction on delay derivatives is derived. In relation to intermittent synchronization, the design of state-feedback intermittent synchronization controllers is also studied. The intermittent gain matrices can be obtained by solving a set of linear matrix inequalities. The main contributions of this paper are threefold. (1) We show how the Razumikhin technique is utilized for getting a better estimate on the decay/growth rate of the solutions of stable/unstable mode. (2) We show how the reaction–diffusion effect can be further explored with the extended Wirtingers inequality. (3) We show how the intermittent synchronization controller with minimized feedback gain can be designed in the framework of linear matrix inequalities.
The rest of this paper is structured as follows: Next section formulates the problem. A new periodically intermittent synchronization result is presented in Sect. 3. Section 4 provides a sufficient condition for designing periodically intermittent synchronization controllers. In Sect. 5, two reaction–diffusion chaotic neural networks are simulated to verify the effectiveness of the theoretical results. Finally, the paper is concluded in Sect. 6.
2 System description and preliminaries
In the sequel, if not explicitly, matrices are assumed to have compatible dimensions. The notation \(P>(\ge ,{<}, \le )\,0\) is used to denote a symmetric positive-definite (positive-semidefinite, negative, negative-semidefinite) matrix. I and \(I_n\) denote an identity matrix of suitable dimension and an identity matrix of size \(n\times n\), respectively. \(\mathbb {N}_0\) represents the set of nonnegative integers, that is, \(\mathbb {N}_0=\{0,1,2,\ldots \}\).
Consider the following reaction–diffusion neural networks with discrete and finite distributed delays:
where \(\varOmega = \{(x_1,x_2,\ldots ,x_m)^\mathrm{T}{:}\ |x_q|\le l_q,\ q = 1,2,\ldots ,m\}\) with \(\partial \varOmega \) being its boundary; \(z(t,x) = \left( z_1(t,x),z_2(t,x),\ldots ,z_n(t,x)\right) \) is the neuron state vector at time t and in space x; \(D_q=\mathrm{diag}\big (d_{q1},d_{q2},\ldots ,d_{qn}\big )\) with \(d_{qi}\ge 0\), \(q=1,2,\ldots ,m\), \(i=1,2,\ldots ,n\), are the transmission diffusion coefficients; \(A = \mathrm{diag}\left( a_1,a_2,\ldots ,a_n\right) \) with \(a_i>0\) representing the reset rate of the ith neuron is the self-feedback term; \(W_0,W_1,W_2\in {R^{n \times n}}\) denote the connection weight matrix, the delayed connection weigh matrix, the distributively delayed connection weight matrix, respectively; the time-varying functions \(\tau (t)\) and \(\sigma (t)\) denote the transmission discrete delay and distributed delay, respectively, and satisfy \(\underline{\tau } \le \tau (t) \le \overline{\tau }\) and \(0\le \sigma (t)\le \overline{\sigma }\); \(J\in \mathbb {R}^n\) is the external input vector; \(f(z) =\left( f_1(z_1),f_2(z_2),\ldots ,f_n(z_n)\right) \) with \(f_i(\cdot )\) being the activation function of the ith neuron satisfies the following assumption:
(H) For each \(i\in \{1,2,\ldots ,n\}\), there exist scalars \(F_i\) and \(G_i\) such that
The initial value and boundary value conditions associated with neural network (1) are given by
where \(r=\max \{\overline{\tau },\overline{\sigma }\}\), and \(\phi (s,x)\in C([-r,0] \times \varOmega ,\mathbb {R}^n)\).
We consider system (1) as the drive system. The corresponding response system is
with the initial value and boundary value conditions
where \(\hat{z}(t,x)\in \mathbb {R}^n\) is the state vector of the response system, \(B\in \mathbb {R}^{n\times n_c}\) is the input matrix, \(u(t)\in \mathbb {R}^{n_c}\) is the control input vector, and \(\hat{\phi }(s,x)\in C([-r,0] \times \varOmega ,\mathbb {R}^n)\).
The objective of this paper is to design periodically intermittent controllers such that the complete synchronization between system (1) and system (2) is achieved. The periodically intermittent state-feedback controller has the form
in which
In the above, \(K\in \mathbb {R}^{n_c\times n}\) is the intermittent feedback gain to be designed, \(T>0\) denotes the control period, and \(\delta _k\in [\underline{\delta },\overline{\delta }]\) with \(0<\underline{\delta }\le \overline{\delta }<T\) denotes the width of control window.
Define the synchronization error \(e(t,x) = \hat{z}(t,x) - z(t,x)\). From (1)–(3), the synchronization error system is
where \(g(e(t,x))=f(\hat{z}(t,x))-f(z(t,x))\). From (H), we have
For \(z(t,x)\in C([-r,b]\times \varOmega ,\mathbb {R}^n)\) with \(b\ge 0\), define
and for \(\phi (\theta ,x)\in C([-r,0]\times \varOmega ,\mathbb {R}^n)\), define
Throughout the paper, we use the following stability concept for the synchronization error system (4).
Definition 1
The synchronization error system (4) is said to be globally exponentially stable, if there exist two positive constants \(\gamma \) and M, such that \(\Vert e(t,x)\Vert _2\le M\Vert e_0\Vert _C\mathrm{e}^{ - \gamma t}\), for all \(t\ge 0\).
Now, the synchronization problem is reduced to the problem of designing a gain matrix K such that the synchronization error system (4) is globally exponentially stable.
The following lemmas will be needed in proving our results.
Lemma 1
For any compatible vectors x and y, matrix \(M>0\), the following inequality holds
Lemma 2
Let \(S{:}\,\varOmega \rightarrow {R^n}\) be a vector function belonging to \(C^1(\varOmega )\), which vanishes on boundary \(\partial \varOmega \) of \(\varOmega \), i.e., \(S(x)|_{\partial \varOmega } = 0\). Then, for any \(q\in {1,2,\ldots ,m}\), for any \(n \times n\) matrix \(R\ge 0\), the following inequality holds
Proof
Fix \(q\in {1,2,\ldots ,m}\), from Wirtinger’s inequality [43], for any \(R>0\), we have
Then, integrating both sides of the above inequality from \( - {l_i}\) to \( l_i\) for \( i\in \{1,2,\ldots ,m\}\) and \(i\ne q\), we get (6).
Lemma 3
[44] Let \(z{:}\, [-r,a)\rightarrow \mathbb {R}^n\) be continuously differentiable on (0, a) and continuous on \([-r,a)\), where \(r,\,a>0\). Define \(\Vert z_t\Vert _r=\max \nolimits _{\theta \in [-r,0]}\Vert z(t+\theta )\Vert \). For any \(t\ge 0\), if \(\Vert z(t)\Vert <\Vert z_t\Vert _r\), then \(D^+\Vert z_t\Vert _r\le 0\); if \(\Vert z(t)\Vert =\Vert z_t\Vert _r\), then \(D^+\Vert z_t\Vert _r=\mathrm{max}\{0,D^+|z(t)|\}\).
3 Intermittent synchronization analysis
In this section, we first develop a Razumikhin-type technique for achieving an exponential estimate of the solutions of error system (4) in the closed-loop mode. For \(k\in \mathbb {N}_0\), define \(t_{ik}=\left\{ \begin{array}{lll}kT, &{}\quad i=1\\ kT+{\delta _k}, &{}\quad i=2\end{array}\right. \). Set \(\varDelta _{ik}=[t_{ik},t_{3-i,k+i-1})\), and \(\overline{\varDelta }_{ik}=[t_{ik},t_{3-i,k+i-1}]\), \(i=1,2\).
Lemma 4
Given \({n_c}\times n\) matrix K, the control period T, and the control width \(\delta _k\in [\underline{\delta },\overline{\delta }]\) with \(0<\underline{\delta }\le \overline{\delta }<T\), consider the synchronization error system (4) satisfying (H). If for some prescribed scalars \(\epsilon \ge 0\), \(\beta _1\ge 0\), and \(\alpha _{1i}>0\), \(i=1,2\), there exist a \(n\times n\) matrix \(P_{1}> 0\), and \(n\times n\) positive diagonal matrices \(\varLambda _{1h}\), \(h=0,1,2\), such that the following linear matrix inequalities (LMIs) hold:
where
then,
and
where \(V_1(t) = \mathrm{e}^{\epsilon t}\int _\varOmega e^\mathrm{T}(t,x)P_1e(t,x)\mathrm{d}x,\,\overline{V}_1 (t) = \mathop {\max }\nolimits _{-r\le \theta \le 0} {V_1}(t + \theta )\), and \(\mathcal{H}_1(\beta _1){=}\min \{1,\mathrm{e}^{-\beta _1({\underline{\delta }}\,-r)}\}\).
Proof
For any given \(k\in \mathbb {N}_0\), set \(U_{1}(t){=}\mathrm{e}^{\beta _1(t-t_{1k} )}V_{1}(t)\), \(t\in [t_{1k}- r, t_{2k}]\). We prove that for any given \(\varepsilon >0\), \(U_{1}(t)\) satisfies
By the contrary, there exists at least one \(t\in \varDelta _{1k}\) such that \(U_{1}(t)\ge (1+\varepsilon )\overline{V}_{1}(kT)\). Let \({t^*} = \inf \{ t \in \varDelta _{1k};{U_1}(t)\ge (1 + \varepsilon )\overline{V}_1(t_{1k})\}\). Note that
It follows that \({t^*} \in (t_{1k},t_{2k} )\). Moreover,
and
The relation (13) implies that
which further implies
The relation (13) also implies that
It follows that
Integrating the above inequality from \(t^{*}-\sigma (t^{*})\) to \(t^{*}\) yields
For \(t\in (t_{1k},t_{2k})\), the derivative of \({U_1}(t)\) along the solutions of error system (4) is
Denoting \(P_{1}=(p_{ij})_{n\times n}\), integration by parts and application of the Dirichlet boundary condition lead to
Recalling condition (7), application of the inequality (6) in Lemma 2 yields
Using the inequality in Lemma 1 and considering the relation (5), we have
It follows from condition (9) and relation (16) that
On the other hand, by the relation (5),
Set \(\varLambda _{1h} = \mathrm{diag}\{ \lambda _{1h1},\lambda _{1h2},\ldots ,\lambda _{1hn}\}\), \(h=0,1\). It follows from the above inequalities that
where \(\eta (t,x)=\mathrm{col}(e(t,x),e(t-\tau (t),x),g(e(t,x)),g(e(t-\tau (t),x)))\).
Substituting (18) and (19) into (17) with \(t=t^{*}\) and using (15) and (20) yields
where
in which \(\tilde{\varGamma }_1=\varGamma _1+\overline{\sigma } P_1W_2\varLambda _{12}^{-1}W_2^\mathrm{T}P_1\).
Application of Schur complement to (8) leads to \(\varXi _{1}<0\). Then coming back to (21), we obtain \(\dot{U}_1(t^*)<0\), which contradicts (14). Thus, (12) holds. Let \(\varepsilon \rightarrow {0^ + }\), we arrive at (10). Note that for given \(\theta \in [-r,0]\), the claim (10) implies that
and
Putting (22)–(23) together yields (11). This completes the proof.
Next, we use a slightly different technique to estimate the solutions of error system (4) in the open-loop mode.
Lemma 5
Given \({n_c}\times n\) matrix K, the control period T, and the control width \(\delta _k\in [\underline{\delta },\overline{\delta }]\) with \(0<\underline{\delta }\le \overline{\delta }<T\), consider the synchronization error system (4) satisfying (H). If for some prescribed scalars \(\epsilon \ge 0\), \(\beta _{i}\ge 0\), \(\alpha _{ij}>0\), \(i=2,3\), \(j=1,2\), satisfying \(\beta _2\ge \beta _3\), there exist a \(n\times n\) matrix \(P_{2}> 0\), and \(n\times n\) positive diagonal matrices \(\varLambda _{ih}\), \(i=2,3\), \(h=0,1,2\), such that the following LMIs hold:
where
in which
Then,
where \(V_2(t) = \mathrm{e}^{\epsilon t}\int _\varOmega e^\mathrm{T}(t,x)P_2e(t,x)\mathrm{d}x\), \(\overline{V}_2(t) = \mathop {\max }\nolimits _{ - r \le \theta \le 0} {V_2}(t+\theta )\), and
Proof
Fix \(k\in \mathbb {N}_0\). We start by showing that
For any given \(t\in \varDelta _{2k}\), at least one of the following two cases holds: (1) \(V_2(t)<\overline{V}_2(t)\); (2) \(V_2(t)=\overline{V}_2(t)\). If case (1) holds, then by Lemma 3, we have \(D^+\overline{V}_2(t)\le 0\), i.e., (29) holds.
If case (2) holds, it follows that \(V_2(t)\ge V_2(s)\), \(s\in [t-r,t]\). Then, similar to the proofs of (15) and (19), we can obtain from condition (26) with \(i=2\) that
and
The relation (5) implies
The derivative of \(V_2(t)\) along the solutions of error system (4) on \((t_{2k},t_{1,k+1})\) is
Applying the inequality (18) with \(P_2\) instead of \(P_1\) and the inequalities (30)–(32) to (33) leads to
where
in which \(\tilde{\varGamma }_2=\varGamma _2+\overline{\sigma } P_2W_2\varLambda _{22}^{-1}W_2^\mathrm{T}P_2\). Note that condition (25) with \(i=2\) is equivalent to \(\varXi _{2}<0\). It follows from (34) that \({\dot{V}}_2(t)\le \beta _2V_2(t)\). Then by Lemma 3, we obtain \(D^+\overline{V}_2(t)\le \beta _2V_2(t)=\beta _2\overline{V}_2(t)\). Therefore, (29) holds.
From (29), we obtain
Next, we proceed to show that for the case where \(r<T-{\delta _k}\), the estimate (35) on \([t_{2k}+r,t_{1,k+1}]\) can be improved as follows
Set \(U_2(t)=V_2(t)\mathrm{e}^{-\beta _3(t-t_{2k})}\). We have to only prove that for any given \(\varepsilon >0\), it holds that
According to (35), (37) is true for \(t=t_{2k}+r\). Suppose on the contrary that (37) does not hold, then it follows from (35) that there exists a \(t^{*}\in (t_{2k}+r,t_{1,k+1})\) such that
and
The relations (38)–(40) imply that \(U_2(t^{*})\ge U_2(s)\), \(s\in [t^{*}-r,t^{*}]\). It follows that
and
The derivative of \(U_2(t)\) along the solutions of error system (4) on \((t_{2k},t_{1,k+1})\) is given by
Putting the inequalities (42), (43), and (32) with \(i=3\) together into (44), and considering the inequality (18) with \(P_2\) instead of \(P_1\), we get
where
in which \(\tilde{\varGamma }_3=\varGamma _3+\overline{\sigma } P_2W_2\varLambda _{32}^{-1}W_2^\mathrm{T}P_2\). It is easy to verify that condition (25) with \(i=3\) is equivalent to \(\varXi _3<0\). It follows from (45) that \({\dot{U}}_2(t^{*})<0\), which contradicts (41). Hence, we have proven (37). Letting \(\varepsilon \rightarrow 0\) in (37), we obtain (36). Then, combining (35) and (36) together yields
Recalling \(\delta _k\ge \underline{\delta }\) and \(\beta _2\ge \beta _3\), the inequality (28) is immediately derived, which completes the proof.
Remark 1
The closed-loop and open-loop modes have different dynamical behaviors. So we introduce different techniques to estimate \(V_1(t)\) and \(V_2(t)\). In the closed-loop mode, a helpful trick is the introduction of the parameter \(\beta _1\) for estimating the decay rate of \(V_1(t)\). It can be seen from (11) that the parameter \({\beta _1}\) can lead to a tighter estimate on \(\overline{V}_1(t_{2k})\) for the case of \(r<{\underline{\delta }}\,\). In the open-loop mode, in order to reduce the conservatism of the estimation analysis for the case of \(r<T-{\delta _k}\), we divide the estimation into two steps. It can be seen from (28) that for the case of \(r<T-{\delta _k}\), the two-step estimation is less conservative than the single-step estimation. We note that the special dynamical characteristics of synchronization error system (4) for the case of \(r<{\delta _k}\) and for the case of \(r<T-{\delta _k}\) cannot be captured by the Lyapunov functional method proposed in [30–32].
Based on the above Lemmas 4–5, we are in a position to state our stability criterion for synchronization error system (4).
Theorem 1
Given \({n_c}\times n\) matrix K, the control period T, and the control width \(\delta _k\in [\underline{\delta },\overline{\delta }]\) with \(0<\underline{\delta }\le \overline{\delta }<T\), consider the drive system (1) and the periodically intermittently controlled response system (2), in which the activation function f satisfies (H). If for some prescribed scalars \(\epsilon \ge 0\), \(\mu _1>0\), \(\beta _{i}\ge 0\), \(\alpha _{ij}>0\), \(i=1,2,3\), \(j=1,2\), satisfying \(\beta _2\ge \beta _3\), there exist \(n\times n\) matrices \(P_{i}> 0\), \(i=1,2\), and \(n\times n\) positive diagonal matrices \(\varLambda _{hi}\), \(i=1,2,3\), \(h=0,1,2\), such that (7), (8), (9), (24), (25), (26), and the following LMIs hold:
where
then the response system (2) and the drive system (1) are completely synchronized.
Proof
Assume that the LMIs (8), (9), (25), (26), and (46) are feasible, then there exists a positive scalar \(\hat{\epsilon }>\varepsilon \) such that the LMIs (8) with \(\hat{\epsilon }\) instead of \(\epsilon \), (9), (25) with \(\hat{\varepsilon }\) instead of \(\epsilon \), (26), and (46) still hold. For \(t \ge - r\), define \(\omega _i(t) = \mathrm{e}^{\hat{\epsilon } t}\int _\varOmega e^\mathrm{T}(t,x)P_ie(t,x)\mathrm{d}x\). Set \(\overline{\omega }_i (t) = \mathop {\max }\nolimits _{ - r \le \theta \le 0} \omega _i(t + \theta )\), \(i=1,2\), for \(t\ge 0\). According to Lemmas 4–5, we have
and
Moreover, condition (46) implies that
By virtue of (49)–(51), we deduce that
It follows from (47) that
which implies
For any given \(t\ge 0\), there exists \(k\in \mathbb {N}_0\) such that \(t\in \varDelta _{1k}\) or \(t\in \varDelta _{2k}\). If \(t\in \varDelta _{1k}\), it follows from (48) and (52) that
If \(t\in \varDelta _{2k}\), it follows from (48) and (52) that
Set \(\lambda _1=\min \nolimits _{i=1,2}\{\lambda _{\min }(P_i)\}\), and \(\lambda _2=\lambda _{\max }(P_2)\). Combining with inequalities (53) and (54), we have
where \(M=\sqrt{\lambda _2/\lambda _1\max \{1,(1/\mu _2)\mathrm{e}^{\epsilon (T-\underline{\delta })}\}}\). Therefore, we can conclude that synchronization error system (4) is globally exponentially stable.
Remark 2
Unlike [30], the stability analysis of synchronization error system (4) is performed by using a Razumikhin-type estimation technique. Compared with the Lyapunov functional-based analysis method proposed in [30], an attractive feature of our method is that there is no restriction on the derivatives of \(\tau (t)\) and \(\sigma (t)\), and more information on the bounds of the discrete delay \(\tau (t)\) is taken into account. Therefore, our synchronization criterion is suitable for a wider class of delayed reaction–diffusion neural networks.
4 Intermittent controller design
In this section, under the assumption that
we will present solutions to the exponential synchronization problem of the drive system (1) and the intermittently controlled response system (2). For this purpose, we set \(\overline{L}_1=L_1^{\frac{1}{2}}\). Based on Theorem 1, we are ready to address the issue of periodically intermittent controller design.
Theorem 2
Given the control period T and the control width \(\delta _k\in [\underline{\delta },\overline{\delta }]\) with \(0<\underline{\delta }\le \overline{\delta }<T\), consider the drive system (1) and the periodically intermittently controlled response system (2), in which the activation function f satisfies (H). If for some prescribed positive scalars \(\epsilon \), \(\mu _1\), \(\beta _i\), \( \alpha _{ij}\), \(i = 1,2,3, j=1,2\) satisfying \(\beta _2 \ge \beta _3\), there exist \(n\times n\) matrices \(X_i>0\), \(i = 1,2\), \(n\times n\) positive diagonal matrices \(\bar{\varLambda }_{ih}\), \(i=1,2,3\), \(h=0,1,2\), and a \(n_c \times n\) matrix \(\bar{K}\), such that the following LMIs hold:
where \(X_3=X_2\), \(\mu _2\) is defined in (47), and
then \( K=\bar{K}X_1^{-1}\),the response system (2) and the drive system (1) are completely synchronized.
Proof
Define \( P_i=X_i^{-1},\ i=1,2\), \(\bar{\varLambda }_{jh}=\varLambda _{jh}^{-1},\ j=1,2,3,\ h=0,1,2\), and \(K=\bar{K}X_1^{-1}\). It is easy to see that the matrix inequalities (56), (58), and (59) are equivalent to (7) and (24), (9) and (26), and (46), respectively. Set \(P_3=P_2\). Pre- and post-multiplying (57) by diag\(\{P_i,P_i,\varLambda _{i0},\varLambda _{i1},\varLambda _{i2},\varLambda _{i1},\varLambda _{i0}\}\), \(i=1,2,3\), and using Schur complement, we obtain (8) and (25). Thus, the condition of Theorem 1 is satisfied. This means that the control gain K renders the synchronization error system (4) to be globally exponentially stable.
Remark 3
The results in [30–32] are only concerned with deriving some sufficient conditions for periodically intermittent synchronization. Since these sufficient conditions are related to the solutions to some transcendental equations, it is difficult to apply these sufficient conditions for designing synchronization controllers. The synchronization criterion presented in Theorem 1, however, is expressed in the form of matrix inequalities. By using matrix transformation technique, the design problem of synchronization controllers is reduced to a feasibility problem of the LMIs given in Theorem 2.
Remark 4
From a practical point of view, it is desirable to design a controller with small gain. This is because the designed controllers with small gains will reduce the energy consumption. Therefore, we propose the following optimization problem to limit the norm of gain matrix K.
The optimization problem (60) can be solved by using the following algorithm.
Algorithm 1. (Intermittent synchronization controller design algorithm)
Step 1: Set initial \(\nu \) and step length h.
Step 2: Solving the LMIs in the constraint condition of the optimization problem (60) to obtain \(\bar{K}\).
Step 3: If Step 2 gives a feasible solution, set \(\nu =\nu -h\) and return to Step 2. Otherwise, stop.
If \(\nu _{\min }\) is the minimum value of the optimization problem (60), then the spectral norm of gain matrix K satisfies \(\Vert F\Vert \le \nu _{\min }\).
5 Numerical examples
In this section, the applicability of the derived synchronization results is illustrated through two numerical examples.
Example 1
In order to show the less conservatism of our result, we consider the example given in [30] for comparison. The drive system of the example is a two-dimensional delayed reaction–diffusion neural network with the form of (1), in which \(\varOmega =[-5,5]\) and \(m=1\), and the system parameters are as follows:
and the activation functions are given by \(f_i(s)=\tanh (s),\ \mathrm{for}\ s\in \mathbb {R},\ i=1,2\), the corresponding intermittently controlled response system is described by (2) and (3) with \( BK =\mathrm{diag}(6,16)\).
It is easy to verify that \(\underline{\tau }=0.5\), \(\overline{\tau }=1\), \(\overline{\sigma }=1\), \(L_1=0\), \(L_2=0.5I_2\), and \(\tilde{L}=I_2\). To compare our result with the result of [30], we assume that the control width \(\delta _k\) is constant, i.e., \(\delta _k=\delta \) for all \(k\in \mathbb {N}_0\). Now, for given control period T, we apply our Theorem 1 to find the minimum rate of control time defined by \(\kappa =\delta /T\), which guarantee the complete synchronization of the drive and response system. When the control period T is selected as \(T= 0.5,\, 1,\, 2,\, 3,\, 5\) and 10 successively, by solving the LMIs of Theorem 1 with the choice of the corresponding values of parameter vector \((\epsilon ,\mu _1,\beta _1,\beta _2,\beta _3,\alpha _{11},\alpha _{12},\alpha _{21},\alpha _{22},\alpha _{31},\alpha _{32})\) given in Table 1, the obtained maximum rates of control times for different control period T are listed in Table 2. The calculation results in Table 2 show that the rate of control time actually decreases as we increase the value of control period T.
For this example, both the results of [31, 32] fail to verify the stability of the synchronization error system. The synchronization condition given in [30] relies on the discrete-delay derivative \(\dot{\tau }_i(t)\), \(i=1,2\). It is easy to that \(s_i\triangleq \inf \nolimits _{t\ge 0}\{1-\dot{\tau }(t)\}=0.75\). However, in [30], the values of \(s_i\), \(i=1,2\), are taken as \(s_i=1\), \(i=1,2\). Moreover, according to Corollary 3 of [30], the synchronization criterion given in Corollaries 4–5 of [30] is incorrect. By applying the synchronization criterion of Corollary 3 in [30] with \(s_i=0.75\), \(=1,2\), the minimum value of \(\kappa \) for any control period T is 0.994. Clearly, the calculations show that our method improves the corresponding one in [30–32].
For simulation studies, the initial value and boundary value conditions of the drive system are chosen as
The temporal evolution of the drive system with the initial condition (61) and the boundary value condition (62) is depicted in Fig. 1. In this situation, the drive system exhibits spatiotemporal chaotic behavior. To illustrate the effectiveness of our intermittent synchronization criterion, we choose \(T=0.5\) and \(\delta =0.4669\). Then, \(\kappa =0.9338\). According to Table 2, the complete synchronization of the intermittently coupled neural networks can be achieved. Since \(0.9338<0.994\), the synchronization criterion given in [30] fails to work. We assume that the initial value and boundary value conditions of the intermittently controlled response system are given by
The spatiotemporal evolution of synchronization error e(t, x) is depicted in Fig. 2. Referring to this figure, it can seen that the synchronization error becomes sufficiently small for \(t>2\) s, which indicates that the synchronization is successfully achieved.

Spatiotemporal chaotic behavior of the neural network described in Example 1

Spatiotemporal evolution of synchronization error e(t, x) for Example 1
Example 2
Consider a delayed reaction–diffusion neural network to be the drive system (1) with the following parameters:
and the activation functions are given by \({f_i}(x) = \frac{{|x + 1| - |x - 1|}}{2},i = 1,2,3\). The corresponding intermittently controlled response system is described by (2) with \( B^\mathrm{T} =\left[ \begin{array}{lll}1 &{}\quad 0 &{}\quad 0\\ 0 &{}\quad 1 &{}\quad 0\end{array}\right] ^\mathrm{T}\).
One can verify that the assumption (H) is satisfied. Moreover, \(\underline{\tau }=\overline{\tau }=0.9\), \(\overline{\sigma }=0.1\), \(L_1=0\), \(L_2=0.5I_3\), and \(\tilde{L}=I_3\). For given control period \(T=2\), and the control width \(\delta _k\in [1.86,1.9]\), solving the optimization problem (60) with the choice of
the obtained minimum value of \(\nu \) is \(\nu =31.79\). The corresponding intermittent synchronization gain is given by \(K = \left[ {\begin{array}{lll} 6.0933 &{}\quad 1.2837 &{}\quad -0.0658\\ -0.2258 &{}\quad 31.6819 &{}\quad 0.0126 \end{array}} \right] \). For simulation studies, the initial conditions of the drive system and the response system are set to
and
respectively. Moreover, the drive system and the response system are supplemented with the following Dirichlet boundary value conditions:
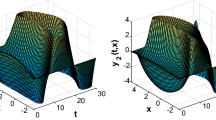
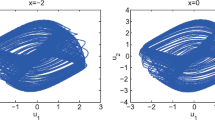
With the initial condition (63) and the Dirichlet boundary value condition, the drive system exhibits a chaotic behavior as shown in Fig. 3a–c. To illustrate the effect of intermittent feedback on the synchronization performance, we assume that the control width \(\delta _k\) is generated randomly with the constraint that \(1.86\le \delta _k\le 1.9\). The spatiotemporal evolution of the synchronization error e(t, x) is depicted in Fig. 4a–c. Referring to this figure, it can be seen that the synchronization is achieved for \(t>8\,\mathrm{s}\), showing the effectiveness of the proposed intermittent synchronization controller design method.

Spatiotemporal chaotic behavior of the neural network described in Example 2

Spatiotemporal evolution of synchronization error e(t, x) for Example 2
6 Conclusions
The periodically intermittent synchronization problem for coupled reaction–diffusion neural networks with mixed delays has been revisited. A novel piecewise exponential-type Lyapunov function-based method has been introduced to analyze the stability of the synchronization error system. The new method is based on the subtle estimates on the decay/divergent rate of solutions during closed-/open-loop mode. Consequently, an improved synchronization result has been derived, which can provide smaller rate of control time than the previous results. Based on the established synchronization criterion, a LMI-based sufficient condition for designing desired synchronization controllers has been presented. Two numerical examples have shown the effectiveness of the proposed results. The idea behind this paper may be further extended to the intermittent synchronization problem of complex dynamical networks governed by coupled parabolic partial differential equations with time delays. It is worth mentioning that in comparison with continuous synchronization method, the proposed intermittent synchronization scheme can greatly reduce the amount of information required to be transmitted to achieve synchronization of transmitter and receiver. Furthermore, the spatiotemporal chaos model has greater volume keys and key space than the time chaos model and thus can improve additionally security. Theses characteristics are important for secure communication and encryption schemes. The applications of the proposed intermittent synchronization scheme to secure communication would be discussed in the follow-up work.
References
Wang, Z., Zhang, H.: Synchronization stability in complex interconnected neural networks with nonsymmetric coupling. Neurocomputing 108, 84–92 (2013)
Zhang, G., Hu, J., Shen, Y.: Exponential lag synchronization for delayed memristive recurrent neural networks. Neurocomputing 154, 86–93 (2015)
Ding, S., Wang, Z.: Stochastic exponential synchronization control of memristive neural networks with multiple time-varying delays. Neurocomputing 162, 16–25 (2015)
Ding S., Wang Z., Huang Z., Zhang H.: Novel switching jumps dependent exponential synchronization criteria for memristor-based neural networks. Neural Process. Lett. (2016). doi:10.1007/s11063-016-9504-3
Ding S., Wang Z.: Lag quasi-synchronization for memristive neural networks with switching jumps mismatch. Neural Comput. Appl. (2016). doi:10.1007/s00521-016-2291-y
Song, Q., Cao, J., Zhao, J.: Periodic solutions and its exponential stability of reaction–diffusion recurrent neural networks with continuously distributed delays. Nonlinear Anal. Real World Appl. 7, 65–80 (2006)
Li, X., Cao, J.: Delay-independent exponential stability of stochastic Cohen–Grossberg neural networks with time-varying delays and reaction–diffusion terms. Nonlinear Dyn. 50, 363–371 (2007)
Liu, P., Yi, F., Guo, Q., Yang, J., Wu, W.: Analysis on global exponential robust stability of reaction–diffusion neural networks with S-type distributed delays. Phys. D 237, 475–485 (2008)
Zhang, Z., Yang, Y., Huang, Y.: Global exponential stability of interval general BAM neural networks with reaction–diffusion terms and multiple time-varying delays. Neural Netw. 24, 457–465 (2011)
Ma, Q., Feng, G., Xu, S.: Delay-dependent stability criteria for reaction–diffusion neural networks with time-varying delays. IEEE Trans. Cybern. 43, 1913–1920 (2013)
Wang, J., Feng, J., Xu, C., Zhao, Y.: Stochastic stability criteria with LMI conditions for Markovian jumping impulsive BAM neural networks with mode-dependent time-varying delays and nonlinear reaction–diffusion. Commun. Nonlinear Sci. Numer. Simul. 19, 258–273 (2014)
Zhao, H., Huang, X., Zhang, X.: Turing instability and pattern formation of neural networks with reaction–diffusion terms. Nonlinear Dyn. 76, 115–124 (2014)
Ma, J., Tang, J.: A review for dynamics of collective behaviours of network of neurons. Sci. China Technol. Sci. 58, 2038–2045 (2015)
Qin, H., Wu, Y., Wang, C., Ma, J.: Emitting waves from defects in network with autapses. Commun. Nonlinear Sci. Numer. Simul. 23, 164–174 (2015)
Ma, J., Qin, H., Song, X., Chu, R.: Pattern selection in neuronal network drive by electric autapses with diversity in time delays. Int. J. Mod. Phys. B. 29, 1450239 (2015)
Peora, L.M., Carroll, T.L.: Synchronization in chaotic systems. Phys. Rev. Lett. 64, 821–824 (1990)
Nijmeijer, H., Mareels, I.M.Y.: An observer looks at synchronization. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 44, 882–890 (1997)
Fradkov, A., Nijmeijer, H., Markov, A.: Adaptive observer-based synchronization for communication. Int. J. Bifurc. Chaos 12, 2807–2813 (2000)
Arenas, A., Daz-Guilera, A., Kurths, J., Morenob, Y., Zhou, Y.C.: Synchronization in complex networks. Phys. Rep. 469, 93–153 (2008)
Kocarev, L., Tasev, Z., Parlitz, U.: Synchronizing spatiotemporal chaos of partial differential equations. Phys. Rev. Lett. 79, 51–54 (1997)
Lou, X., Cui, B.: Asymptotic synchronization of a class of neural networks with reaction–diffusion terms and time-varying delays. Comput. Math. Appl. 52, 897–904 (2006)
Ma, Q., Xu, S., Zou, Y., Shi, G.: Synchronization of stochastic chaotic neural networks with reaction–diffusion terms. Nonlinear Dyn. 67, 2183–2196 (2012)
Wu, H., Zhang, X., Li, R., Yao, R.: Synchronization of reaction–diffusion neural networks with mixed time-varying delays. Control Autom. Electr. Syst. 26, 16–27 (2015)
Sheng, L., Yang, H., Lou, X.: Adaptive exponential synchronization of delayed neural networks with reaction–diffusion terms. Chaos Solitons Fractals 40, 930–939 (2009)
Gan, Q.: Adaptive synchronization of stochastic neural networks with mixed time delays and reaction–diffusion terms. Nonlinear Dyn. 69, 2207–2219 (2012)
Rakkiyappan, R., Dharani, S., Zhu, Q.: Synchronization of reaction–diffusion neural networks with time-varying delays via stochastic sampled-data controller. Nonlinear Dyn. 79, 485–500 (2015)
Hu, C., Jiang, H., Teng, Z.: Impulsive control and synchronization for delayed neural networks with reaction–diffusion terms. IEEE Trans. Neural Netw. 21, 67–81 (2010)
Yang, X., Cao, J., Yang, Z.: Synchronization of coupled reaction–diffusion neural networks with time-varying delays via pinning-impulsive control. SIAM J. Control Optim. 51, 3486–3510 (2013)
Chen W.-H., Luo, S., Zheng, W.X.: Impulsive synchronization of reaction–diffusion neural networks with mixed delays and its application to image encryption. IEEE Trans. Neural Netw. Learn. Syst. (2015). doi:10.1109/TNNLS.2015.2512849
Hu, C., Yu, J., Jiang, H., Teng, Z.: Exponential synchronization for reaction–diffusion networks with mixed delays in terms of p-norm via intermittent driving. Neural Netw. 31, 1–11 (2012)
Gan, Q.: Exponential synchronization of stochastic Cohen–Grossberg neural networks with mixed time-varying delays and reaction–diffusion via periodically intermittent control. Neural Netw. 31, 12–21 (2012)
Gan, Q., Zhang, H., Dong, J.: Exponential synchronization for reaction–diffusion neural networks with mixed time-varying delays via periodically intermittent control. Nonlinear Anal. Model. Control 19, 1–25 (2014)
Huang, T., Li, C., Yu, W., Chen, G.: Synchronization of delayed chaotic systems with parameter mismatches by using intermittent linear state feedback. Nonlinearity 22, 569–584 (2009)
Li, N., Cao, J.: Intermittent control on switched networks via \(\omega \)-matrix measure method. Nonlinear Dyn. 77, 1363–1375 (2014)
Wang, X., Li, C., Huang, T., Pan, X.: Impulsive control and synchronization of nonlinear system with impulse time window. Nonlinear Dyn. 78, 2837–2845 (2014)
Cai, S., Jia, Q., Liu, Z.: Cluster synchronization for directed heterogeneous dynamical networks via decentralized adaptive intermittent pinning control. Nonlinear Dyn. 82, 689–702 (2015)
Zhang, G., Shen, Y.: Exponential synchronization of delayed memristor-based chaotic neural networks via periodically intermittent control. Neural Netw. 55, 1–10 (2014)
Chen, W.-H., Zhong, J., Jiang, Z., Lu, X.: Periodically intermittent stabilization of delayed neural networks based on piecewise Lyapunov functions/functionals. Circuits Syst. Signal Process. 33, 3757–3782 (2014)
Zhang, W., Huang, J., Wei, P.: Weak synchronization of chaotic neural networks with parameter mismatch via periodically intermittent control. Appl. Math. Model. 35, 312–620 (2011)
Liu, X., Chen, T.: Cluster synchronization in directed networks via intermittent pinning control. IEEE Trans. Neural Netw. 22, 1009–1020 (2011)
Song, Q., Huang, T.: Stabilization and synchronization of chaotic systems with mixed time-varying delays via intermittent control with non-fixed both control period and control width. Neurocomputing 154, 61–69 (2015)
Liu, X., Chen, T.: Synchronization of nonlinear coupled networks via aperiodically intermittent pinning control. IEEE Trans. Neural Netw. Learn. Syst. 26, 113–126 (2015)
Seuret, A., Gouaisbaut, F.: Wirtinger-based integral inequality: Application to time-delay systems. Automatica 49, 2860–2866 (2013)
Chen, W.-H., Zheng, W.X.: On global asymptotic stability of Cohen-Grossberg neural networks with variable delays. IEEE Trans. Circuits Syst. Regul. Pap. 55, 3145–3159 (2008)
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported in part by the National Natural Science Foundation of China under Grants 61573111 and 61633011, the Guangxi Natural Science Foundation under Grants 2013GXNSFDA019003 and 2015GXNSFAA139003.
Rights and permissions
About this article

Cite this article
Chen, WH., Liu, L. & Lu, X. Intermittent synchronization of reaction–diffusion neural networks with mixed delays via Razumikhin technique. Nonlinear Dyn 87, 535–551 (2017). https://doi.org/10.1007/s11071-016-3059-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-016-3059-8