
Abstract
We give an exhaustive, non-perturbative classification of exact travelling-wave solutions of a perturbed sine-Gordon equation (on the real line or on the circle) which is used to describe the Josephson effect in the theory of superconductors and other remarkable physical phenomena. The perturbation of the equation consists of a constant forcing term and a linear dissipative term. On the real line candidate orbitally stable solutions with bounded energy density are either the constant one, or of kink (i.e. soliton) type, or of array-of-kinks type, or of “half-array-of-kinks” type. While the first three have unperturbed analogs, the last type is essentially new. We also propose a convergent method of successive approximations of the (anti)kink solution based on a careful application of the fixed point theorem.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The purpose of this work is an exhaustive, non-perturbative analysis of travelling-wave solutions of the “perturbed” sine-Gordon equation
for all constant \(\alpha \ge 0,\gamma \in {\mathbb {R}}\). This equation has been used to describe with a good approximation a number of interesting physical phenomena, notably Josephson effect in the theory of superconductors [21, 22], which is at the base [4] of a large number of advanced developments both in fundamental research (e.g. macroscopic effects of quantum physics, quantum computation) and in applications to electronic devices (see e.g. Chapters 3–6 in [5]), or e.g. the propagation of localized magnetohydrodynamic modes in plasma physics [37]. The last two terms are respectively a dissipative and a forcing one; the sine-Gordon equation (sGe) is obtained by setting them equal to zero. In the Josephson effect (for an introduction see e.g. Chapter 1 in [4]) \(\varphi (x,t)\) is the phase difference of the macroscopic quantum wave functions describing the Bose–Einstein condensates of Cooper pairs in two superconductors separated by a very thin, narrow and long dielectric (a so called “Josephson junction”). The \(\gamma \) term is the (external) “bias current”, providing energy to the system, whereas the dissipative term \(\alpha \varphi _t\) is due to Joule effect of the residual current across the junction due to single electrons. We neglect the (typically, rather small) surface losses of the superconductors, which are described by the more complete equation
Equation (1) describes also the dynamics of the continuum limit of a sequence [36] of pendula constrained to rotate around the same horizontal x-axis, subject to a constant torque \(\gamma \), a viscous force \(-\alpha \varphi _t\) (due e.g. to their immersion in a viscous fluid) and coupled to each other through a torque spring; \(\varphi (x,t)\) is the deviation angle from the lower vertical position at time t of the pendulum having position \(x\) (see Fig. 1).

Left Discretized mechanical model for the sine-Gordon equation, with a Spring, b solder, c brass, d tap and thread, e wire, f nail, g, h ball bearings and i base. Right Stable static (up) and kink (down) solutions
It important to clarify: (a) which solutions of the sGe are deformed into solutions of (1) with the same qualitative features; (b) whether (1) admits also new kinds of solutions. Candidate approximations to the former can be obtained within the standard perturbative method (see e.g. [23–25, 31, 34] and references therein) based on modulations of the unperturbed solutions with slowly varying parameters (typically velocity, space/time phases, etc.) and small radiation components. In particular, the Ansatz for a deformation of a travelling-wave solution \(\varphi _{(0)}(x,t)= g_{(0)}(x-vt)\) of the sGe reads
\(\gamma \) plays the role of perturbation parameter, whereas the slowly varying \(x_0(t),\tilde{v}(t)\) and the perturbative “radiative” corrections \( \gamma \varphi _{(1)}(x,t)+\cdots \) have to be computed perturbatively in terms of \(\alpha \varphi _t+\gamma \). If in particular \(\varphi _{(0)}(x,t)\) is a (anti)kink [equivalently, (anti)soliton] solution, one finds [16, 17, 28, 29] also candidate approximate solutions with constant velocity
which are characterized by a power balance between the dissipative term \(\alpha \varphi _t\) and the external force term \(\gamma \). Studying the convergence of the perturbative series would be difficult, not very illuminating for the existence and qualitative properties of the solutions for small \(\gamma \), and certainly inadequate for large \(\gamma \). Numerical resolutions [19, 30] of (1) are indicative, but cannot provide solid, exhaustive answers to the two questions above.
The travelling-wave Ansatz transforms (1) into a well-known [1, 2, 33, 39, 40] ordinary differential equation (ODE), whose phase space analysis in principle allows to give a complete classification (and additional qualitative properties) of the travelling-wave solutions. However, up to our knowledge previous works [14, 27] present an incomplete classification, in that they consider only solutions of type a) and they stick only to part (near the origin) of the parameter space \((\alpha ,\gamma )\). The main purpose of this work is to provide (Sect. 3) an exhaustive non-perturbative classification of exact travelling-wave solutions of (1) on the real line or on the circle for all \(\alpha \ge 0,\gamma \in {\mathbb {R}}\) and to propose (Sect. 4) an improved method of successive approximations converging to the (anti)kink solutions, at least for sufficiently small \(\gamma \). As we will see, the classification includes also solutions of type (b). We will in particular concentrate on solutions of physical interest, namely solutions that have bounded energy density \(h\) (and therefore also bounded derivatives) and are known, or are candidate, to be orbitally stable; in the sequel we shall denote them as the relevant solutions. To make the paper essentially self-contained, we give detailed preliminaries in Sects. 2, 3 and in the “Appendix”. If the velocity is \({\pm }1\) the ODE is of first order and can be solved by quadrature, otherwise it is the second order one describing the motion along a line of a particle subject to a “washboard” potential and immersed in a linearly viscous fluid (or equivalently a single pendulum subject to a constant torque and to a viscous force), and therefore the problem is essentially reduced to studying this simpler mechanical analog. Several useful monotonicity properties (Sect. 2.2) allow in particular to identify (Theorem 1 in Sect. 3) four families of relevant solutions: three of them (the arrays of kinks for all values of \(\gamma \), the kinks and the constants only for \(\gamma <1\)) are deformations of analogous families of solutions of the sGe, whereas the fourth family is without unperturbed analog: as each of its elements interpolates between a kink and an array of kinks (see Fig. 4), we have named it a “half-array of kinks”. None of the other solutions is relevant. The families of perturbed kinks and arrays of kinks depend on one free parameter less than the unperturbed ones, as the phase velocity v becomes a function of the other parameters [for the kink coincides, at lowest order in \(\gamma \), with (4)].
Theorems of existence and uniqueness for a class of dissipative equations including (2) and the following boundary conditions have been proved: \(\varphi \rightarrow 0\) as \(x\rightarrow \pm \infty \) [6, 11]; Dirichlet, Neumann or pseudoperiodic conditions on a finite space interval [12, 13]. The boundedness and stability of solutions for this class with Dirichlet boundary conditions has been studied in [7–9, 32]. The study of (1–2) on the whole real axis is more difficult; at the end of Sect. 3 we briefly recall some results [14, 20, 27, 35] on the stability of travelling-wave solutions of (1) which can be found in the literature. As we shall briefly explain, a comprehensive stability analysis requires additional work.
2 Preliminaries
Space or time translations transform any solution \(\varphi (x,t)\) into a new one \(\varphi (x+a,t+b)\); one thus obtains a two-parameter family of solutions \([\varphi ]\). The pendula chain model described above allows a qualitative comprehension of the main features of the solutions, e.g. of their instabilities. The constant solutions of (1) are \(\varphi ^s(x,t)\equiv - \sin ^{-1}\gamma +2\pi k\) and \(\varphi ^u(x,t)\equiv \sin ^{-1}\gamma +(2k+1)\pi \). The former are stable, the latter unstable, as they yield respectively local minima and maxima of the energy density
They resp. correspond to configurations with all pendula hanging down or standing up. Our definition of a kink \(\varphi \) is: \(\varphi \) is a non-constant stable travelling-wave solution with all derivatives rapidly going to zero outside some localized region. Then mod. \(2\pi \) it must be
with \(n\in {\mathbb {Z}}\). As we shall recall below, only \(n=1\) (kink) and \(n=-1\) (antikink) are possible (whereas \(n=0\) corresponds to the constant \(\varphi _s\)). In the mentioned mechanical model the kink (resp. antikink) solution describes a localized twisting of the pendula chain by \(2\pi \) around the axis anticlockwise (resp. clockwise), which moves with constant velocity. The above condition yields an energy density h (rapidly) going to two local minima as \(x\rightarrow \pm \infty \). Although this makes the total Hamiltonian \(H:=\int _{-\infty }^{+\infty }h(x,t)dx\) divergent, the time-derivative is finite and non-positive:
[The negative sign at the right-hand side (rhs) shows the dissipative character of the \(\alpha \)-term in (1)]. The effect of \(\gamma \ne 0\) is to make the values of the energy potential density \(\gamma \varphi -\cos \varphi \) at any two minima different; this leaves room for a steady compensation of the energy dissipated by the \(\alpha \)-term and the variation of the total potential energy due to the substantial variation of \(\varphi (x,t)\) from one minimum point to the lower next in some spacial interval, and so may account for solutions not being damped to constants as \(t\rightarrow \infty \).
Without loss of generality we can assume \(\gamma \ge 0\). If originally this is not the case, one just needs to replace \(\varphi \rightarrow -\varphi \). If \(\gamma > 1\) no solutions \(\varphi \) having finite limits and vanishing derivatives for \(x\rightarrow \pm \infty \) can exist, in particular no static solutions. If \(\gamma =1\) the only static solution \(\varphi \) having for \(x\rightarrow \pm \infty \) finite limits and vanishing derivatives is \(\varphi \equiv -\pi /2{\text{(mod }}2\pi )\), which however is manifestly unstable.
2.1 Reduction to ODE by the travelling-wave Ansatz
We specify our travelling-wave Ansatz as follows:
If \(v={\pm }1\), replacing the Ansatz in (1) one obtains the first order ODE,
One can explicitly solve this equation by quadrature [15]. Already in [10] it has been argued that if \(\gamma <1\) all solutions of (8) yield unstable solutions of (1), except the constant one, which yields the static constant solution \(\varphi ^s(x,t)\equiv -\sin ^{-1}\gamma \). The same argument holds also if \(\gamma =1\). If \(\gamma >1\), by integrating one finds
the denominator is positive for all \(s\in {\mathbb {R}}\), so that the solution g is strictly monotonic and pseudoperiodic, i.e. the sum of a linear and a periodic function, so that (for all \(\xi ,g_0\))
with \(u(g):=g'(g)=(\gamma -\sin g)/\alpha \). We shall denote such solution as \(\tilde{g}(\xi )\); this will yield (Theorem 1) a candidate stable solution \(\check{\varphi }\) of (1), representing an ‘array of (anti)kinks’ travelling with velocity \({\pm }1\) (such velocities are not possible in the sGe case).
In the rest of the section we assume that \(v\ne \pm 1\). Replacing in (1) we find in all three remaining cases the second order ODE
which can be regarded as the 1-dimensional equation of motion w.r.t. the ‘time’ \(\xi \) of a particle with unit mass, position \(g\), subject to a ‘washboard’ potential energy’ \(U(g)\) and a viscous force with viscosity coefficient \(\mu \) given by
Note that in Eq. (10) \(\alpha , v\) appear only through their function (11)\(_2\), and that in the range \(|v|\in [0,1[\) (resp. \(|v|\in ]1,\infty [\)) \(\mu (|v|)\) is strictly increasing (resp. decreasing), and therefore invertible. In Fig. 2 \(U(g)\) is plotted for four different values of \(\gamma \); it admits local minima (resp. maxima) only if \(0\le \gamma <1\), in the points
As \(\gamma \rightarrow 1\) the points \(g_k^m,g_k^M\) approach each other, and for \(\gamma =1\,g_k^m=g_k^M=(2k+1/2)\pi \) are inflections points. For \(\gamma >1\) no minima, maxima or inflections exist, and \(U_g<0\) everywhere. The “total energy of the particle” \({\text{e}}:=g'{}^2/2+U(g)\) is a non-increasing function of \(\xi \), as \({{\rm e}}'=-\mu g'{}^2\).

The potential energy \(U(g)=6-(\cos g+\gamma g)\) for \(\gamma =0, \gamma =.5, \gamma =1, \gamma =1.5\)
An exhaustive classification of the solutions of Eq. (10) for all values of \(\mu ,\gamma \) has been performed in several works, starting from [1, 39, 40] (see e.g. [33] or [2] for comprehensive presentations). The equation is equivalent to the autonomous first order system
Since the rhs’s are functions of \(g,u\) with bounded continuous derivatives, by the Peano–Picard theorem on the extension of the integrals all solutions are defined on all \(-\infty <\xi <\infty \) (global existence), and the trajectories (paths) in the phase space \((g,u)\) do not intersect (uniqueness). Each is uniquely identified by any of its points \((g_0,u_0)\). The paths may have finite endpoints (limits as \(\xi \rightarrow \pm \infty \)) only at singular points [i.e. where the rhs’s (12) vanish]. These exist only for \(\gamma \le 1\), lie all on the axis \(u=0\), and are
Their characteristic equations can be summarized as
the upper, lower sign resp. refer to the \(A_k, B_k\) for \(\gamma <1;\gamma =1\) gives the solutions at \(C_k\):
-
1.
The solutions \(\lambda _1,\lambda _2\) for \(A_k\) are real of opposite sign, and \(A_k\) is a saddle point.
-
2.
The solutions \(\lambda _1,\lambda _2\) for \(B_k\) are:
-
Both real and negative if \(\mu \ge 2(1-\gamma ^2)^{1/4}\). \(B_k\) is a node, and there are an infinite number of paths going to \(B_k\) as \(\xi \rightarrow \infty \) with the same tangent. These represent overdamped motions of the ‘particle’ towards \(g_k^m\).
-
Complex conjugates (but not purely imaginary) if \(0<\mu < 2(1-\gamma ^2)^{1/4}\). \(B_k\) is a focus, and there are an infinite number of paths going to \(B_k\) along a spiral as \(\xi \rightarrow \infty \). These represent damped oscillations of the ‘particle’ about \(g_k^m\).
-
Opposite imaginary if \(\mu =0\). \(B_k\) is a center, and there exist closed paths (cycles) around it. These represent periodic oscillations of the ‘particle’ about \(g_k^m\).
-
-
3.
If \(\gamma =1\) then \(\lambda _1=0, \lambda _2=-\mu \). If \(\mu >0\,C_k\) is a saddle-node: there are two separatrices in the half-plane \(g>(2k+1/2)\pi \) (one going leftwards to \(C_k\), the other leaving from \(C_k\) rightwards) and infinitely many in the half-plane \(g<(2k+1/2)\pi \) going rightwards to \(C_k\) (these again represent overdamped motions of the ‘particle’).
The solutions are continuous functions of the parameters \(\mu ,\gamma \) and of \((g_0,u_0)\) (away from singular points), uniformly in every compact subset. In Sect. 2.2 we recall that the latter dependences are also monotonic.
To analyze the qualitative features, the monotonicity properties and the asymptotic behaviour of the paths near the endpoints it is useful to eliminate the ‘time’ \(\xi \) and adopt as an independent variable the ‘position’ g, as in the unperturbed case. The path of any solution \(g(\xi )\) of (10) is cut into pieces by the axis \(u=0\). Let \(Y\equiv ]\xi _-,\xi _+[\subseteq {\mathbb {R}}\) be the ’time’ interval corresponding to a piece,
be its sign and let \(G\equiv ]g_-,g_+[:=g(Y)\). In Y the function \(g(\xi )\) can be inverted to give a function \(\xi :g\in G\rightarrow \xi (g)\in Y\). So one can express the ‘velocity’ u and the ‘kinetic energy’ \(z:=u^2/2\) of the ‘particle’ as functions of its ‘position’ \(g\). By derivation we find that \(g''(\xi )=u_g\big (g(\xi )\big ) g'(\xi )\) and the second order problem (10) with initial condition \(\big (g(\xi _0),u(\xi _0)\big )=(g_0,u_0)\) in Y is equivalent to two first order problems: the first is
(note that this is invariant under the replacement \(g\rightarrow g+2\pi \)), which has to be solved first, and yields a solution \(u=u(g;g_0,u_0;\mu ,\gamma )\) continuous in all arguments (away from singular points); the second is
is integrated out by quadrature
and implicitly yields a solution \(g=g(\xi ;g_0,u_0;\mu ,\gamma )\) in Y. If Y is not the whole \({\mathbb {R}}\), the final step is the patching of solutions in adjacent intervals Y.
Choosing in (17) g as \(g_{\pm }\) one obtains \(\xi _{\pm }\). If \(z(g)\) vanishes as \(\eta ^a:=|g_{\pm }-g|^{a}\) with \(a\ge 2\) as \(g\uparrow g_+\) or \(g\downarrow g_-\), then \(\xi _+=\infty \) or \(\xi _-=-\infty \). The behaviour of \(u(g),z(g)\) near \(g_{\pm }\) can be determined immediately solving (15) at leading order in a left (resp. right) neighbourhood of \(g_+\) (resp. \(g_-\)). In particular, if \(\gamma <1\) and \(g_{\pm }=g_k^M\) (a maximum point of U) then the equation obtained by replacing the power law Ansatz \(u(g)=\eta ^{a/2}u_{\pm }+o(\eta ^{a/2})\) in (15) is solved by
where for \(\epsilon ,\epsilon '\in \{+,-\}\,u_{\epsilon '\epsilon }\) is defined by
Formula (18) gives the leading behaviour of the four separatrices having an end on \(A_k\).
Problem (15) is also equivalent to the Volterra-type integral equation
where \(z_0:=u_0^2/2\). When \(\mu =0\) (no dissipation) this gives the solutions explicitly and amounts to the conservation of the ‘total energy’ \({\text{e}}(g)=z(g)+U(g)\) of the ‘particle’.
2.2 Monotonicity properties
In agreement with the physical intuition, the solutions of (15) and the extremes of G depend on the parameters \(\mu ,z_0,\gamma \) monotonically (see e.g. [1, 39, 40]). For completeness, in the “Appendix” we recall the proof of the following monotonicity properties.
Property 1
As functions of \(z_0: z=u^2/2\) is strictly increasing; \(g_+\) is increasing and \(g_-\) decreasing (strictly as long as they have not reached the values \(\pm \infty \)).
Property 2
As a function of both \(\mu ,-\epsilon \gamma \) the solution \(u(g;g_0,u_0;\mu ,\gamma )\) is strictly decreasing (resp. strictly increasing) for \(g\in ]g_0,g_+[\) (resp. \(g\in ]g_-,g_0[\)). Correspondingly, the solution \(g(\xi ;g_0,u_0;\mu ,\gamma )\) is strictly decreasing as a function of both \(\epsilon \mu ,-\gamma \), and so is either extreme \(g_{\pm }\) (strictly as long as it has not reached values \(\pm \infty \)).
Remark
In general \(g_{\pm }\) will be discontinuous functions of \(\mu ,z_0,\gamma \) at \(g_{\pm }=g_k^M\).
Whenever the domain G of the solution \(z(g)\) contains a whole interval \(]g,g+2\pi [\) we define
Given any \(g_0\in \bar{G}\), let \(g_k:=g_0+2\pi k, K:=\{k\in {\mathbb {Z}} | g_k\in \bar{G}\}\) and \(I_k:=I(z,g_k)\) if \(k,k+1\in K\).
Property 3
If \(\epsilon =-\) the sequences \(\{z(g_k)\},\{I_k\}\) are strictly increasing and diverging as \(k\rightarrow \infty \), with K bounded from below. If \(\epsilon =+\) the sequences \(\{z(g_k)\},\{I_k\}\) are: either constant, with \(K={\mathbb {Z}}\); or strictly increasing and converging as \(k\rightarrow \infty \), with K bounded from below; or strictly decreasing, diverging as \(k\rightarrow -\infty \), and either converging as \(k\rightarrow \infty \), or with K upper bounded. Moreover,
3 Classification of the solutions
3.1 Short reminder about the sine-Gordon equation
If \(\gamma =\alpha =\mu =0\) (sGe) the ‘total energy of the particle’ e is conserved and its value (together with the free parameter v) parametrizes different kinds of solutions of (10). Plotting \(U(g)\) (Fig. 3, left) we get an immediate qualitative understanding of them. They all have bounded \(z(g)={\text{e}}-U(g)\), and therefore bounded \(g'\). This implies that also the corresponding \(\varphi _x,\varphi _t,h\) are bounded functions of x, t. Only solutions corresponding to \({\text{e}}\ge 1\) and any \(v \in ]-1,1[\) are spectrally stable [3, 20, 35]. If \({\text{e}}= 1\) a path either degenerates to a saddle point [e.g. \(\big (g(\xi ),u(\xi )\big )\equiv \big (g_0^M,0\big )=A_0\): the ‘particle’ stays at \(A_0\)] or is heteroclinic (i.e. starts and ends at two neighbouring saddle points, e.g. \(A_0,A_1\): the ‘particle’, confined in the interval \(g_0^M<g<g_1^M\), starts at ‘time’ \(\xi =-\infty \) from \(A_0\) and reaches \(A_1\) at \(\xi =\infty \), or viceversa, see Fig. 3, left). Replacing the result in (7), mod. \(2\pi \) they translate into unstable solutions of the sGe if \(v^2>1\) (in the model of Fig. 1 all pendula of the chain stand upwards outside a small region), and the celebrated families of (spectrally stable) solutions
if \(v^2<1\). In the model of Fig. 1 all pendula of the chain hang downwards outside a small region, and within the latter they twist around the x-axis \(n=\pm 1\) times, i.e. once anti-clockwise or clockwise, depending on the sign. \(\hat{\varphi }_{(0)}^+(x,t;v)\) is the family of kink solutions, \(\hat{\varphi }_{(0)}^-(x,t;v)\) the family of antikink solutions, parametrized by the velocity v, which can take any value in \(]-1,1[\).

The potential energy \(U(g)=6 -(\cos g+\gamma g)\) for \(\gamma =0\) (left) and \(\gamma =.1\) (right). Correspondingly, the ‘kinetic energies’ and the ‘total energies’: (1) \(\hat{z},\hat{{{\rm e}}}\) associated to the kink, \(\mu =\hat{\mu }(\gamma )\); (2) \(\check{z},\check{{{\rm e}}}\) associated to an array of kinks, \(\mu <\hat{\mu }(\gamma )\); (3) (only at the right) \(\bar{z},\bar{{{\rm e}}}\) associated to a half-array of kinks solutions, \(\mu <\hat{\mu }(\gamma )\)
Similarly, unbounded orbits (\({\text{e}}> 1\)) correspond to arrays of kinks or antikinks if \(v^2<1\). The corresponding solutions \(\check{g}_{(0)}(\pm \xi ;{\text{e}})\) are pseudoperiodic, in the sense (9): the ‘particle’ travels towards the right from \(g_-=-\infty \) to \(g_+=\infty \) (or viceversa) and its ‘kinetic energy’ \(\check{z}(g)\) is \(2\pi \)-periodic (see Fig. 3, left), in particular takes the same value \(z_M\) at all points \(g_k^M\),
Again, the corresponding solutions of the sGe are [3, 35] unstable if \(v^2> 1\) and stable if \(v^2< 1\) (‘most’ pendula point resp. upwards and downwards in the pendula chain model). The stable solutions \(\check{\varphi }_{(0)}^{\pm }(x,t)=\check{g}_{(0)}(\pm \xi ;{\text{e}})\) respectively describe two-parameter families of evenly spaced “arrays of kinks and antikinks”, the two parameters being the velocity v hidden in (7), which can take any value in \(]-1,1[\), and one of the variables \( \check{{\text{e}}},z_M,\Xi _{(0)}; \Xi _{(0)}\) is the ’time lapse’ [computed by (9)\(_2\)] the ’particle’ spends to travel a distance \(2\pi \).
Clearly there is a heteroclininc bifurcation at \( {\text{e}}=1\), or equivalently \( z_M=0\), or \(\Xi _{(0)}=\infty \).
On the contrary, solutions corresponding to cycles around centers \(B_k ({\text{e}} \in ]-1,1[)\), or with \(v^2>1\), are unstable [3, 20, 35].
3.2 The perturbed sine-Gordon equation
If not all \(\gamma ,\alpha ,\mu \) vanish (perturbed sine-Gordon) there are [10] solutions \(g(\xi )\) with \(g'\) diverging as \(\xi \) goes to infinity;Footnote 1 the corresponding solutions \(\varphi \) have \(\varphi _x,\varphi _t,h\) diverging at space and time infinity, hence are not relevant. In Ref. [10] we have analyzed all the possibilities for \(\gamma <1\) and shown (Proposition 1) that relevant (in the sense of the introduction) solutions \(\varphi \), if they exist, can be only of four types, all with \(v^2\le 1\) and \(\epsilon :={\text{ sign} } (g')\ge 0\); out of them three are deformations of travelling-wave solutions of the sGe. Here we show (Theorem 1) that all four types actually exist, extending our analysis to all the parameter space \((\alpha ,\gamma )\).
We assume (without loss of generality) \(\gamma >0\), and for \(\mu \in [0,\infty ]\) we set
[by definition, \(\check{v}(\infty )=1\)].
For \(\gamma \le 1\), replacing in (7) the constant solutions \(g(\xi )\equiv A_k, g(\xi )\equiv B_k,C_k\), we resp. obtain the stable solution \(\varphi ^s\) and the unstable one \(\varphi ^u\) already given in Sect. 2.
For a given \(\mu >0\), a unique (up to a shift of \(\xi \)) pseudoperiodic path \(\check{p}(\xi )=\big (\check{g}(\xi ),\check{u}(\xi )\big )\) exists for sufficiently large \(\gamma \); this attracts exponentially fast all other paths \(p(\xi )=\big ( g(\xi ), u(\xi )\big )\) having \(g_+=\infty \). In fact, since the two graphs \(z(g),\check{z}(g)\) do not intersect, \(w(g):=z(g)-\check{z}(g)\) is either positive- or negative-definite. By (15) it fulfills
implying
(we have denoted as \(\check{z}^M\) the maximum of \(\check{z}\) and as \(g_0\) the initial g-point): \(|w(g)|\) is strictly decreasing. By integration we find for \(g\ge g_0\)
namely \(|w(g)|\rightarrow 0\) exponentially fast as \(g\rightarrow \infty \), as claimed. As \(\gamma \) is decreased, such an attracting path disappears, becoming: a sequence of heteroclinic paths connecting each \(A_k\) with \(A_{k+1}\), if \(0 < \mu < \mu ^*\); a saddle-node infinite-period bifurcation, if \( \mu > \mu ^*\), with a special constant \(\mu ^*\). Let \(\hat{\gamma }(\mu )\) denote the bifurcation curve as a function of \(\mu \). To our knowledge this curve has been first studied by Urabe [41], who found \(\mu ^* \simeq 1.193\); see e.g. also [26, 38] and references therein for an updated report including more recent results. \(\hat{\gamma }(\mu )\) is a continuous function such that \(\hat{\gamma }(\mu ) \simeq 4\mu /\pi \) as \(\mu \sim 0\) and \( \hat{\gamma }(\mu ) =1\) for \(\mu \ge \mu ^*\). In \([0,\mu ^*]\) it is strictly increasing, hence invertible: we shall denote as \(\hat{\mu }(\gamma )\) the inverse function. This fulfills the bounds (36) and can be determined with arbitrary accuracy for small \(\mu \) also by the method described in Theorem 2. The above curves play a crucial role in singling out different regions in the parameter space \((\gamma ,\mu )\), as depicted in Fig. 4b.

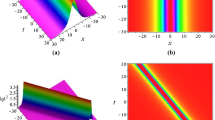
Left Qualitative behaviour at \(t=0\) of the following solutions of (1) for \(\gamma =0.3\): stable constant \(\varphi ^s\) (green), kink \(\hat{\varphi }^+(x-4,0)\) (blue), array of kinks \(\check{\varphi }^+(x,0)\) (violet) and half-array of kinks \(\bar{\varphi }^+(x,0)\) (brown). Right Regions of the parameter space where such solutions exist (\(\varphi ^s\) exists in the region \(\gamma <1\)). (Color figure online)
Fixed \(\mu \), only for \(\gamma >\hat{\gamma }(\mu )\) (light and dark grey areas in Fig. 4b) the attracting pseudoperiodic path \(\check{p}(\xi )\) exists, and \(\epsilon =+\): the ‘particle’ travels rightwards from \(g_-=-\infty \) to \(g_+=\infty \), and its ‘kinetic energy’ \(\check{z}(g)\) not only fulfills (23), but is \(2\pi \)-periodic [see Fig. 3, right, where also \(\check{{\text{e}}}(g)\) is plotted]. By (21) this implies
the left-hand side (lhs) is independent of g (and can be called simply \(\check{I}\)). This equality amounts to an energy balance condition: ‘the energy dissipated by the viscous force equals the potential energy gap after a \(2\pi \) displacement of the particle’. For g fixed, \(\check{z}, \check{I}\) are strictly increasing, continuous functions of \(z_M\) by Properties 1 and 2, whereas \(\check{\mu }\) and \(\Xi \) are strictly decreasing and continuous respectively by (27) and (9)\(_2\). All these functions are therefore invertible, and one can adopt any of the four parameters \(z_M,\check{I},\mu ,\Xi \) (in the appropriate range) as the independent one, beside \(\gamma \). For \(|v|<1\) one can adopt also \(|v|\) as the independent parameter, as the function \(\mu (|v|)\) defined in (11)\(_2\) is strictly monotonic. As \(\mu \rightarrow \infty \), or equivalently \(|v|\rightarrow 1, \check{g}(\xi )\) goes to the pseudoperiodic solution \(\tilde{g}(\xi )\) of (8). Replacing \(\check{g}(\xi )\) [or \(\tilde{g}(\xi )\)] in (7) one finds one-parameter families of evenly spaced “arrays of kinks” and of evenly spaced “arrays of antikinks”, as described in Theorem 1; as a parameter one can choose \(z_M,\check{I},\check{\mu },\Xi \), or \(|v|\).
For \(\mu <\mu ^*\) and \(\hat{\gamma }(\mu )< \gamma < 1\) (dark grey region in Fig. 4b), the pseudoperiodic attracting path \(\check{p}(\xi )\) coexists with the sequence of alternating \(B_k,A_k\). For all \(k\in {\mathbb {Z}}\), the saddle connection \(\bar{p}_k(\xi )=\big (\bar{g}_k(\xi ),\bar{u}_k(\xi )\big )\) that leaves from \(A_k\) is attracted by \(\check{p}(\xi )\) exponentially fast (hence again \(\epsilon =+\)): the ‘particle leaves at time \(\xi =-\infty \) from \(g_k^M\) and its trajectory approaches more and more \(\check{g}(\xi )\) as \(\xi \rightarrow \infty^{\prime} \). Replacing \(\bar{g}_k(\xi )\) in (7) one finds new one-parameter families of solutions, the evenly spaced “half-arrays of kinks” or “antikinks”, as described in Theorem 1.
The part of the graph \(\big (\hat{\gamma }(\mu ),\mu \big )\) with \(\mu \in ]0,\mu ^*]\) (the red curve in Fig. 4b) is a heteroclininc bifurcation: fixed \(\mu \), as \(\gamma \downarrow \hat{\gamma }(\mu )\) the pseudoperiodic path approaches the saddles, squeezing down—for all \(k\in {\mathbb {Z}}\)—the saddle connection \(\bar{p}_k(\xi )\), and for \(\gamma =\hat{\gamma }(\mu )\) (i.e. on the red curve in Fig. 4b) both \(\check{p},\bar{p}_k\) merge into a heteroclinic path \(\hat{p}_k(\xi )=\big (\hat{g}_k(\xi ),\hat{u}_k(\xi )\big )\) leaving from \(A_k\) and ending on \(A_{k+1}\) (hence again \(\epsilon =+\)): the ‘particle, confined in the interval \(g_k^M<g<g_{k+1}^M\), leaves at time \(\xi =-\infty \) from \(g_k^M\) and reaches \(g_{k+1}^M\) at time \(\xi =\infty \)’. The corresponding ‘kinetic energy’ \(\hat{z}(g)\) is defined in the same interval [see Fig. 3, right, where also the corresponding \(\hat{{\text{e}}}(g)\) is plotted] and fulfills the boundary conditions \(\lim \nolimits _{g\downarrow g_k^M } \hat{z}(g) =0, \lim \nolimits _{g\uparrow g_{k+1}^M } \hat{z}(g) =0\). By (21) this implies
which is again the ‘energy balance condition between the energy dissipated by the viscous force and the potential energy gap after a \(2\pi \) displacement of the particle’. Replacing \(\hat{g}(\xi ;\gamma )\) in (7) one finds the perturbed (anti)kink solutions, as described in Theorem 1. The (anti)kink solution is also recovered from the array of (anti)kinks in the \(z_M\rightarrow 0\) limit. By inversion of (11)\(_2\) the velocity v will be no more a free parameter, but the function \(v=\pm \check{v}\big (\hat{\mu }(\gamma )\big )\) (with range \(]-1,1[\)) of \(\gamma ,\alpha \) and the helicity \(\pm \) of the (anti)kink solution \(\hat{\varphi }^{\pm }\).
The part of the graph \(\big (\hat{\gamma }(\mu ),\mu \big )\) with \(\mu \in ]\mu ^*,\infty [\), i.e. \(\big (1,]\mu ^*,\infty [\big )\) (the line separating the white from the light grey region in Fig. 4b), is an infinite-period bifurcation: fixed any \(\mu >\mu ^*\), for \(\gamma >\hat{\gamma }(\mu ) \equiv 1\) (grey area in Fig. 4b) the attracting pseudoperiodic path exists; for \(\gamma \le 1\) (white area in Fig. 4b) it does not exists, and is replaced by a sequence of infinite-period saddle-node connections for \(\gamma =1\) (each leaving from a \(C_k\) and ending into \(C_{k+1}\)). All these saddle-node connections again yield unstable \(\varphi \).
For \(\gamma <\hat{\gamma }(\mu )\) (white area in Fig. 4b) neither the pseudoperiodic nor the heteroclininc paths exist; the saddle connections leaving from \(A_k\) end into \(B_k\) or \(B_{k+1}\). This implies that the corresponding \(\varphi \) are unstable, because go to \(\varphi ^u\) either as \(\xi \rightarrow \infty \), or as \(\xi \rightarrow -\infty \).
The segment \(\big (]0,\mu ^*[,1\big )\) (the line separating the dark grey from the light grey region in Fig. 4b) is a saddle-node bifurcation of fixed points: fixed any \(\mu >\mu ^*\) any saddle-node \(C_k\) transforms into the pair node \((B_k,A_k)\) for \(\gamma <1\), while it disappears for \(\gamma >1\).
We have thus partly proved the following theorem (assuming \(\gamma \ge 0\) is no loss of generality):
Theorem 1
Assume \(\alpha ,\gamma \ge 0\). Up to arbitrary translations of \(x,t\) and addition of multiples of \(2\pi \), the relevant travelling-wave solutions of (1) are of the following types:
-
1.
Static, uniform \(\varphi ^s(x,t;\gamma )\equiv \theta :=-\sin ^{-1}\gamma \), for \(\gamma <1\) (white region, dark grey region and red curve in Fig. 4 b).
-
2.
Kink \(\hat{\varphi }^+\) or antikink \(\hat{\varphi }^-\), where \(\hat{\varphi }^{\pm }(x,t;\gamma ):=\hat{g}\left\{ \xi ^{\pm } \big [\hat{\mu }(\gamma )\big ];\gamma \right\} -\pi \), for \(\gamma <1\) (red curve in Fig. 4 b). \(\hat{\varphi }^{\pm }\) respectively travel with phase velocity \(v=\pm \check{v}\big (\hat{\mu }(\gamma )\big )\) and fulfill
$$ \begin{aligned} & \lim \limits _{x\rightarrow -\infty }\hat{\varphi }^{\pm }(x,t;\gamma )=\theta , \\ &\lim \limits _{x\rightarrow \infty }\hat{\varphi }^{\pm }(x,t;\gamma )=\theta \pm 2\pi.\end{aligned} $$(29) -
3.
Arrays of kinks \(\check{\varphi }^+\) or antikinks \(\check{\varphi }^-\), given by: \(\check{\varphi }^{\pm }(x,t;\gamma ,\mu ):=\check{g} \big [\xi ^{\pm }(\mu );\gamma ,\mu \big ]-\pi \), for any \(\mu \in [0,\infty [\) and \(\gamma \ge \hat{\gamma }(\mu )\) (dark and light grey regions in Fig. 4 b); \(\check{\varphi }^{\pm }(x,t;\gamma ,\infty )=\tilde{g}(\pm x-t;\gamma )-\pi \) if \(\gamma >1, \mu =\infty \). \(\check{\varphi }^{\pm }\) have resp. velocity \(v=\pm \check{v}(\mu )\) and fulfill [with \(\Xi \) as defined in (9)]
$$\begin{aligned} & \check{\varphi }^{\pm }(x+X,t;\gamma ,\mu )= \check{\varphi }^{\pm }(x,t;\gamma ,\mu )\pm 2\pi , \\ &X:=\left\{ \begin{array}{ll} \Xi \sqrt{1-v^2} & {\text{if}} \quad \mu <\infty \,\,\Leftrightarrow \,\,|v|<1,\\ \frac{2\pi \alpha }{\sqrt{\gamma ^2-1}} & {\text{if}} \quad \mu =\infty \,\,\Leftrightarrow \,\,|v|=1. \end{array} \right. \end{aligned}$$(30) -
4.
Half-array of kinks \(\bar{\varphi }^+\) or antikinks \(\bar{\varphi }^-\), with \(\bar{\varphi }^{\pm }(x,t;\gamma ,\mu ):=\bar{g} \big [\xi ^{\pm }(\mu );\gamma ,\mu \big ]-\pi \), only if \(0<\gamma <1\) and for any \(\mu \in ]0,\hat{\mu }(\gamma )[\) (dark grey region in Fig. 4 b). \(\bar{\varphi }^{\pm }\) respectively have velocity \(v=\pm \check{v}(\mu )\). They fulfill
$$\begin{aligned}&\lim \limits _{x\rightarrow \mp \infty }\bar{\varphi }^{\pm }(x,t;\gamma ,\mu )=\theta , \\ & \lim \limits _{x\rightarrow \pm \infty } [\bar{\varphi }^{\pm }(x,t;\gamma ,\mu )- \check{\varphi }^{\pm }(x,t;\gamma ,\mu )]=0^+, \end{aligned}$$(31)$$\begin{aligned}&\lim \limits _{g\rightarrow \infty }[\bar{z}(g)-\check{z}(g)]=0^-,\\ &\lim \limits _{\xi \rightarrow \infty }[\bar{g}'(\xi )-\check{g}'(\xi )]=0^-,\\ & \lim \limits _{\xi \rightarrow \infty }[\bar{g}(\xi )-\check{g}(\xi )]=0^+,\quad \end{aligned}$$(32)for suitable choices of \(\check{g},\check{\varphi }^{\pm }\) within their families \([\check{g}], [\check{\varphi }^{\pm }]\) whose elements differ only by a \(x\) -translation. All limits are approached exponentially fast.
All of \(\hat{g}, \check{g},\bar{g},\bar{g}- \check{g}\) are strictly increasing. To parameterize the solutions of classes 3,4 one can adopt as an independent variable alternative to \(\mu \) either \(z_M,\check{I}, |v|\) or \(\Xi \).
All other solutions \(\varphi \) are manifestly unstable and/or have unbounded energy density \(h\).
Remark 3.1
In Fig. 4a we have plotted the qualitative behaviour of a kink, an array of kinks and a half-array of kinks. The latter has no unperturbed analog. It interpolates between the kink at one extreme and the array of kinks at the other. Therefore it cannot be approximated, nor can it even be figured out, by the modulation Ansatz (3).
Remark 3.2
\(\check{\varphi }^{\pm }\) make sense also as solutions of (1) on a circle of length \(L=m X\), for any \(m\in {\mathbb {N}}\). The integer \(m\) parameterizes different topological sectors: in the \(m\)th sector the pendula chain twists around the circle \(m\) times.
Remark 3.3
We emphasize that, in contrast with the unperturbed kink and array of kinks, where v was a free parameter of modulus \(<1, v\) is predicted as a function of \(\gamma ,\alpha \) in the perturbed kink, as a function of \(\gamma ,\alpha \) and one of the parameters \(z_M,\check{I}, \Xi \) in the perturbed array and half-array of kinks.
Rest of the proof
As \(\check{z}(g_k^M)>0, \bar{w}=\bar{z}-\check{z}\) is negative-definite, and we find in the order
exponentially fast as \(g\rightarrow \infty \). The first limit gives (32)\(_1\). From (17) we obtain
where \(\bar{c},\check{c}\) are integration constants. The last integrand is positive and goes exponentially to zero as \(g\rightarrow \infty \), hence the integral converges. Choosing \(\bar{c}-\check{c}=\int ^\infty _{ g_0}ds[]\) we find
with \(\rho (g)\) positive and exponentially vanishing. Applying the inverse \(\bar{g}(\xi )\) of \(\bar{\xi }(g)\) to both sides we find
The second equality is based on Lagrange theorem, where \(\tilde{\xi }\) is a suitable point in \(]\check{\xi }(g)- \rho (g),\check{\xi }(g)[\). Finally, setting \(g=\check{g}(\xi )\) we find
where \(\tilde{\xi }\in ]\xi -\rho \big [\check{g}(\xi )\big ],\xi [\). The second term at the rhs exponentially vanishes as \(\xi \rightarrow \infty \) [since \(\rho \big (\check{g}(\xi )\big )\) does and \(\bar{g}'\) is bounded], proving (32)\(_2\). By (32)\(_1\) now (33)\(_2\) implies (32)\(_3\).
Let \(\tilde{g}(\eta ):= \check{g}(\xi )\) with \(\eta :=\sqrt{1- v^2}\xi ={\text{ sign }}(v)x-|v|t\). \(\tilde{g}_{\eta },\tilde{g}_{\eta \eta }\) are periodic. For \(\gamma >1\), replacing in (10) and letting \(|v| \uparrow 1\) we find that \(\tilde{g}\) fufills (8). This proves the limit \( \lim _{\mu \rightarrow \infty }\check{g}\left( \frac{\pm x-|\check{v}|t}{\sqrt{1-\check{v}^2}};\mu \right) = \tilde{g}(\pm x-t)\), after noting that by (11)\(_2\) \(\mu \rightarrow \infty \) as \(|v| \uparrow 1\).
Finally, we show that no other relevant solutions existFootnote 2. As already said in Sect. 3, if \(\gamma =\alpha =\mu =0\) the other solutions with \(|v|>1\) or \({{\rm e}}<1\) are unstable. If \(\gamma >0\), this also applies to the solutions arising from the cycles of (10), if any. If \(\gamma =1\) the paths connecting \(C_k,C_{k+1}\) [33] yield manifestly unstable \(\varphi \), in that they connect two unstable static solutions. If \(\gamma >0, \alpha =\mu =0\), the solutions \(p(\xi )\) of (10) which are unbounded in \(g\) are unbounded also in \(u\), by conservation of \({{\rm e}}\); if \(\gamma >0, \alpha ,\mu >0\), this applies to all unbounded solutions in \(g\) except the pseudoperiodic \(\check{p}(\xi )\), the saddle connections \(\bar{p}_k(\xi )\).Footnote 3 The \(p(\xi )\) that are unbounded in \(u\) yield solutions \(\varphi \) of (1) which have unbounded energy density \(h\). Therefore, in all cases they yield no other relevant \(\varphi \). \(\square \)
We finally determine the ranges of the various parameters. Clearly, as \(z_M\rightarrow \infty \,\check{z}\) and \(\check{I}\) diverge, whereas \(\check{\mu },\Xi ,\check{v}\) go to zero. We now consider the limit \(z_M\rightarrow 0\). If \(\gamma >1\), as \(z_M\rightarrow 0\) one finds the following leading parts and limits
as \(z_M\) spans \(]0,\infty [\), the range of any of \(\check{I},\check{\mu },\Xi \) is \(]0,\infty [\) and that of \(\check{v}\) is \(]0,1[\). In fact, the Taylor formula of second order for \(\check{z}(g)\) around \(g_k\) can be written without loss of generality in the form
with \(\rho (g)\) bounded; in order that, as \(z_M\rightarrow 0, \check{z}\) keeps nonnegative both in a left and a right neighbourhood of \(g_k, \zeta _1(z_M;\gamma )\) has to approach a finite limit. Replacing this Ansatz in (15) we find at lowest order in \((g-g_k)\)
As \(z_M\rightarrow 0\) this implies (34) [by (27), (9)\(_2\) and (24)\(_2\)] . Summarizing, as \(z_M\) spans \(]0,\infty [\) the range of any of \(\check{I},\check{\mu },\Xi \) is \(]0,\infty [\) and that of \(\check{v}\) is \(]0,1[\).
If \(\gamma \le 1\), by the monotonicity property \(\check{\mu }(\gamma ,z_M)\le \hat{\mu }(\gamma )\), and by the continuity we find [39, 40]
Hence if \(\gamma \le 1\) the range of \(\check{\mu }\) as \(z_M\) spans \([0,\infty [\) is \(]0,\hat{\mu }]\), the range of \(\check{I}\) is \(]2\pi \gamma /\mu ,\infty [\) the range of v is \([0,\hat{v}[\). The following bounds for \(\hat{\mu }(\gamma )\) hold [18, 39, 40] (see [33] for a summary)
In [35] a theorem of linearized spectral (in)stability of travelling-wave solutions of sGe (\(\alpha =\gamma =0\)) was presented: the solutions with \(|v|>1\) (fast solutions) are always unstable; the solutions with \(|v|<1\) (slow solutions) are spectrally stable if they are pseudoperiodic or of (anti)kink type. The authors of [20] have detected and corrected an error in the proof. Note that this can lead at most to orbital stability for \(v\in ]-1,1[\), because no travelling-wave solutions of sGe can be stable or asimptotically stable in the strict sense. In fact, the phase velocity v for \(\alpha =\mu =0\) is a free parameter; when replacing (7) in a particular solution \(g(\xi )\) of (10) one obtains a family of solutions \(\varphi (x,t)\) parametrized by v, like the (anti)kink ones (22). A small change in the initial conditions in general causes a small change of v, which however leads to a constantly growing deviation from the initial solution, which will become larger and larger after a sufficiently long time.
One may expect that the situation improves in the perturbed case, because v is determined by \(\mu ,\alpha ,\gamma \). In Sect. 4 of [14] it is shown that the (anti)kink solution of the perturbed Eq. (1) (with \(\gamma <1\)) is, up to a shift of the argument, asymptotically stable. A theorem of asymptotic linearized stability for both the (anti)kink and the array of the (anti)kinks with \(\gamma <1\) is proved in [27] for \(\gamma <1\); but only w.r.t. compact variations of the initial conditions and in the sense of a pointwise convergence to such solutions as \(t\rightarrow \infty \).Footnote 4
4 Method of successive approximations
Equation (19) can be reformulated as the fixed point equation
for \(z(g)\), where for \(\epsilon >0\) the operator \(A=A(g_0,z_0;\mu ,\gamma )\) is defined by
on the space of nonnegative smooth functions w on \({\mathbb {R}}\) (the domain of w can be always trivially extended to \({\mathbb {R}}\)). According to the method of successive approximations, after a reasonable choice of a function \(z_{(0)}(g)\) as an initial approximation for \(z(g)\), better and better approximations should be provided by \(z_{(n)}:=A^nz_{(0)}(g)\) as \(n\rightarrow \infty \). For this to make sense, at each step it is necessary that \(z_{(n)}\) belongs to the domain of A (in the present case, it must be nonnegative, otherwise the integrand function is ill-defined) and that the sequence converges. With the known standard theorems, this can be guaranteed a priori not in the whole domain G of the unknown z, but only in some smaller interval J containing \(g_0\). In general only the iterated application in infinitely many adjacent intervals allows to extend a local solution to a global one, what makes the procedure of little use for its concrete determination.
Estimating the length of such a J one finds that it is not less than \(2\pi \) only for sufficiently large \(z_0\). Actually, the determination of the solution in an interval of length \(2\pi \) would be enough for the complete determination both in the case of a periodic solution \(\check{z}\) (which is then extended periodically) and of a separatrix \(\hat{z}\) (in that case \(G=]g^M_{k-1},g^M_k[\), which has exactly length \(2\pi \)). The periodicity condition (23) is automatically fulfilled by each \(z_{(n)}\) if we modify the definition of A adjusting the coefficient \(\mu \) to w as follows:
Choosing \(g_0=g^M_{k-1}\) for simplicity, then \(\tilde{\mu }(z_{(n)})\) will converge to \(\check{\mu }(\gamma ,z_0)\). If instead we fix \(\mu \) as an independent parameter, one will obtain \(z_0\) as \(\lim _n z_{(n)}(g_0)\) [39, 40]. For the periodic solution a sufficiently large \(z_0\) amounts to a sufficiently small \(\mu \); in [39, 40] the following quantitative condition was found:
where
So \(\eta _1\) cannot be too small, in particular cannot vanish, what excludes the cases of the periodic solutions \(\check{z}\) having low energy and of the heteroclinic path \(\hat{z}\).
4.1 The kink solution by the method of successive approximations
The standard theorems fail for \(\hat{z}\) because the sup norm has not enough control to guarantee non-negativity of the approximations \(z_{(n)}\) everywhere in G, as well as the fulfillment of a Lipschitz condition by the integrand \(\phi \) and the behaviour (18) near the extremes of G. In this section we adopt a clever, nonstandard choice of the norm and show (Theorem 2) that a single application of the method of successive approximations gives the kink solution \(\big (\hat{\mu },\hat{z}(g)\big )\) in its whole domain \(G=]g^M_{k-1},g^M_k[\).
Assume \(\gamma <1\). Choose \(g_0=g^M_{k-1}, z_0=0\) and let \(y:=g-g_0\). Then
and \(\hat{z}\) fulfills (37), where the operator \(\tilde{A}\) has taken the form
By (18) \(\hat{z}(y)=O(y^2), \hat{z}(2\pi -y)=O\Big ((2\pi -y)^2\Big )\). One easily checks that, more generally, if z has such a behaviour near \(0,2\pi \), so has \(\tilde{A}z\). So it would be more natural to look for the solution from the very beginning in a functional space whose elements have such a behaviour. In \(C^1([0,2\pi ])\) introduce the norm
where the ‘weight’ p should vanish as y and \(2\pi -y\) at \(0,2\pi \) and will be specified later. Clearly
The subspace
is a complete metric space w.r.t. the metric induced by the above norm. In fact, consider a Cauchy sequence \(\{z_n\}\subset V\) in the norm \(\Vert \cdot \Vert \): by (44) it is Cauchy and therefore converges to a (uniformly continuous) function \(z(y)\) also in the norm \(\Vert \cdot \Vert _{\infty }\); moreover for any \(\varepsilon >0\) there exists \(\bar{r}\in {\mathbb {N}}\) such that \(\forall r\ge \bar{r}, \forall m\in {\mathbb {N}}\)
Letting \(m\rightarrow \infty \) we find
showing that \(z\in V\) Footnote 5 and \(\{z_n\}\rightarrow z\) also w.r.t. the topology induced by the above norm.
Let \(a,b\in {\mathbb {R}}\) with \(b>a>0\). The subset
is clearly closed w.r.t. the metric induced by the above norm. We shall look for \((\hat{z},\hat{\mu })\) within a suitable \(Z_{a,b,p}\). First we look for \(a,b\) such that (42) defines an operator \(\tilde{A}:Z_{a,b,p}\rightarrow Z_{a,b,p}\). Up to a factor, we choose \(p^2(y)\) as the \(\gamma =0\) (i.e. unperturbed) kink solution \(\hat{z}_0(y)\), more precisely \(p(y):=\sin \frac{y}{2}\). Then
and, since \(1-\sqrt{1-w}\ge w/2\) we find (setting \(w=\sin ^2\frac{y}{2}\))
Thus for any \(z\in Z_{a,b,p}\) we find
implying the inequalities \(\gamma \pi /2b\le \tilde{\mu }\le \gamma \pi /2a\) and
Similarly,
Lemma 1
For all \(y\ge 0\)
Proof
The first equality is obvious; the other ones follow by integrations over \([0,y]\). \(\square \)
As a consequence, for \(y\in [0,\pi ]\)
Collecting the results, on one hand assuming \(1\ge a/b\ge 1/2\) we find
for all \(y\in [0,2\pi ]\); on the other hand, for \(y\in [0,\pi ]\) we find
This provides bounds for \(y\in [0,\pi ]\). To find bounds for \(y\in [\pi ,2\pi ]\) set \(v=(2\pi -y)\) and note that from (42) it follows
We use (48) to bound the third term at the rhs; as \(v\in [0,\pi ]\), to bound the second term we can use (49) with y replaced by v, but keeping \(p^2(y)=p^2(v)\) at the rhs of the latter. Collecting the results we thus find for \(y\in [\pi ,2\pi ]\)
Hence \(a^2p^2\le 2\tilde{z}\le b^2p^2\), so that \(\tilde{z}\in Z_{a,b,p}\), if we define
In order that \(1/2\le a/b\) it must be
what gives, after some computation,
We conclude that in this \(\gamma \)-range with the above choice of \(a,b\,\tilde{A}Z_{a,b,p}\subset Z_{a,b,p}\), as required.
Let us determine the constraints on a, b following from the condition that \(\tilde{A}\) be a contraction. First, we immediately find
Note that for any \(\alpha >0, |\sqrt{u_1}-\sqrt{u_2}|\le |u_1-u_2|/(2\alpha )\) if \(u_1,u_2\in [\alpha ^2,\infty [\). Hence
whence
implying
Thus, \(\tilde{A}\) is a contraction if
that is,
namely if
Summing up, under this condition \(\tilde{A}\) is a contraction of \(Z_{a,b,p}\) into itself. Since \(z_{(0)}(y):=2p^2(y)=2\sin ^2\frac{y}{2}\) belongs to \(Z_{a,b,p}\), applying the Banach fixed point theorem we find
Theorem 2
Let \(z_{(0)}(y):=2\sin ^2\frac{y}{2}, z_{(n)}:=\tilde{A}^nz_{(0)}, \mu _n:=\tilde{\mu }\big (z_{(n-1)}\big )\), with \(\tilde{A},\tilde{\mu }\) defined as in (42). The sequences \(\{z_{(n)}\}_{n\in {\mathbb {N}}}, \{\mu _n\}_{n\in {\mathbb {N}}}\) converge respectively to the kink solution \(\hat{z}\) [in the norm (43)] and to the corresponding \(\hat{\mu }(\gamma )\), for \(\gamma \) at least in the range (59). With \(\lambda \) defined as in (58), the errors of the \(n\) th approximation are bound by
[To complete the proof we need just to note that, by (56), the convergence of \(z_{(n)}\) implies the convergence of \(\mu _n\) and estimate the second error through standard arguments].
Remark 4.1
More refined computations of upper and lower bounds, with the present \(\gamma \)-independent weight \(p^2(y)=\sin ^2\frac{y}{2}\), would show a \(\gamma \)-range of convergence of the above sequences slightly larger than (59). By choosing a suitable \(\gamma \)-dependent weight \(p^2(y)\), e.g. \(p^2(y)=z_{(1)}(y)/2\), one could show that this range is actually significantly larger. This will be elaborated elsewhere.
We explicitly work out the first approximation. We find:
The results are in good agreement with the plot in Fig. 3, right. Note that the result (64) coincides with (4), as announced. In a similar way one can determine iteratively solutions of type 3 (\(\mu ,\check{z}\)) even with low \(z_M\) [i.e. not fulfilling the bound (40)].
Notes
For instance, by Proposition 3 if \(\epsilon =-\) and \(z(g)\) is defined at least in an interval of length \(2\pi \) then \(g_+=\infty , z(g)\) diverges as \(g\rightarrow \infty , g'(\xi ),\varphi _x,\varphi _t\) diverge as \(\xi \rightarrow -\infty \).
In Ref. [10] this was shown only for \(\gamma <1\). Actually the arguments used there apply also for \(\gamma \ge 1.\)
In fact, if \(u(\xi )>0\) consider the \(\check{p}(\xi )\) with argument \(\xi \) shifted the right amount in order that it attracts \(p(\xi )\) as \(\xi \rightarrow \infty \). If \(u(\xi )>\check{u}(\xi )\), by Property 3 \(u(\xi )\rightarrow \infty \) as \(\xi \rightarrow -\infty \); if \(u(\xi )<\check{u}(\xi )\) then \(p(\xi )\) either is a saddle connection \(\bar{p}_k(\xi )\), or its \(u(\xi )\) becomes negative for sufficiently early ’times’ \(\xi \), and again by Property 3 \(u(\xi )\rightarrow -\infty \) as \(\xi \rightarrow -\infty \). The latter situation occurs also to the \(p(\xi )\) with negative \(u(\xi )\) for sufficiently early ‘times’ \(\xi \) and ending on some \(A_k,B_k\), or \(C_k\).
Our \(v,X(v)\) are resp. denoted as \(c,L(c)\) in [27]. Incidentally, the velocities \(c_1<1, c_2>1\) of the slow and fast solitary waves considered there are in fact the two solutions \(v_1,v_2\) of (11) seen as an equation in the unknown \(|v|\) when \(\mu =\hat{\mu }(\gamma )\); as a consequence they fulfill the relation \(v_1^{-2}+v_2^{-2}=2\), not noted in [27].
If ad absurdum \(\sup |z/p^2|=\infty \) then the lhs would certainly exceed \(\varepsilon \).
Here we recall the latter in the restricted version: if f fulfills conditions ensuring that the differential problem \(\tilde{u}'=f(x,\tilde{u}), \tilde{u}(x_0)=u(x_0)\), has a unique solution \(\tilde{u}\), and \(u'< f(x,u)\) for all \(x\), then it is \(u(x)<\tilde{u}(x)\) for all \(x>x_0\) and \(u(x)>\tilde{u}(x)\) for all \(x<x_0\).
References
Amerio L (1949) Determinazione delle condizioni di stabilitá per gli integrali di un’equazione interessante in elettrotecnica. Ann Mat 30:75–90
Andronov AA, Chaikin CE (1949) Theory of oscillations. Princeton University Press, Princeton
Barone A, Esposito F, Magee CJ, Scott AC (1971) Theory and applications of the sine-Gordon equation. Riv Nuovo Cimento 1:227
Barone A, Paternó G (1982) Physics and applications of the Josephson effect. Wiley-Interscience, New York; and references therein
Christiansen PL, Scott AC, Sorensen MP (2000) Nonlinear science at the dawn of the 21st century, lecture notes in physics, vol 542. Springer, Berlin
D’Acunto B, Renno P (1992) On some nonlinear visco-elastic models. Ric Mat 41:101–122
D’Anna A, Fiore G (2005) Global stability properties for a class of dissipative phenomena via one or several Liapunov functionals. Nonlinear Dyn Syst Theory 5:9–38
D’Anna A, Fiore G (2009) Stability properties for some non-autonomous dissipative phenomena proved by families of Liapunov functionals. Nonlinear Dyn Syst Theory 9:249–262
D’Anna A, Fiore G (2013) Existence, uniqueness and stability for a class of third-order dissipative problems depending on time. Nonlinear Anal Theory Methods Appl 78:104–120
D’Anna A, De Angelis M, Fiore G (2005) Towards soliton solutions of a perturbed sine-Gordon equation. Rend Acc Sci Fis Mat Napoli LXXII, pp 95–110. math-ph/0507005
De Angelis M, Renno P (2008) Existence, uniqueness and a priori estimates for a non linear integro-differential equation. Ric Mat 57:95–109
De Angelis M, Fiore G (2013) Existence and uniqueness of solutions of a class of third order dissipative problems with various boundary conditions describing the Josephson effect. J Math Anal Appl 404:477–490
De Angelis M, Fiore G (2014) Diffusion effects on a superconductive model. Commun Pure Appl Anal 13:217–223
Derks G, Doelman A, van Gils SA, Visser T (2003) Travelling waves in a singularly perturbed sine-Gordon equation. Phys D 180:40–70
Fiore G (2008) Some explicit travelling-wave solutions of a perturbed sine-Gordon equation. In: Liguori (ed) Mathematical physics models and engineering sciences, Napoli, pp 281–288. math-ph/0507005
Fogel MB, Trullinger SE, Bishop AR, Krumhansl JA (1976) Classical particle like behavior of sine-Gordon solitons in scattering potentials and applied fields. Phys Rev Lett 36:1411–1414
Fogel MB, Trullinger SE, Bishop AR, Krumhansl JA (1977) Dynamics of sine-Gordon solitons in the presence of perturbations. Phys Rev B 15:1578–1592
Hayes WD (1953) On the equation for a damped pendulum under a constant torque. Z Angew Math Phys 4:398–401
Johnson WJ (1968) Nonlinear wave propagation on superconducting tunneling junctions. Ph.D. Thesis, University of Wisconsin
Jones CKRT, Marangell R, Miller PD, Plaza RG (2013) On the stability analysis of periodic sine-Gordon traveling waves. Phys D 251:63–74
Josephson BD (1962) Possible new effects in superconductive tunneling. Phys Lett 1:251–253
Josephson BD (1974) The discovery of tunnelling supercurrents. Rev Mod Phys B 46:251–254
Kaup DJ (1976) A perturbation expansion from the Zakharov–Shabat inverse scattering transform. SIAM J Appl Math 31:121–133
Kaup DJ (1976) Closure of the squared Zakharov–Shabat eigenstates. J Math Anal Appl 54:849–864
Kaup DJ, Newell AC (1978) Solitons as particles and oscillators, and in slowly changing media: a singular perturbation theory. Proc R Soc Lond Ser A 361:413–446
Levi M, Hoppensteadt FC, Miranker WL (1978) Dynamics of the Josephson junction. Q Appl Math 35:167
Maginu K (1980) Stability of travelling wave solutions of the active Josephson junction transmission line. J Differ Equ 37:238–260
McLaughlin DW, Scott AC (1977) Fluxon interactions. Appl Phys Lett 30:545–547
McLaughlin DW, Scott AC (1978) Perturbation analysis in fluxon dynamics. Phys Rev A 18:1652–1680
Nakajima K, Onodera Y, Nakamura T, Sato R (1974) Numerical analysis of vortex motion in Josephson structure. J Appl Phys 45:4095
Newell AC (1978) The inverse scattering transform, nonlinear waves, singular perturbations and synchronized solitons. Rocky Mt J Math 8:25
Rionero S (2012) Asymptotic behaviour of solutions to a nonlinear third order P.D.E. modeling physical phenomena. Boll Unione Mat Ital 9:451–468
Sansone G, Conti R (1956) Equazioni differenziali nonlineari, CNR—Monografie Matematiche 3. Ed. Cremonese, Roma
Satsuma J, Yajima N (1974) Initial value problems of one-dimensional self-modulation of nonlinear waves in dispersive media. Prog Theor Phys Suppl 55:284–295
Scott AC (1969) Waveform stability of a nonlinear Klein–Gordon equation. Proc IEEE 57:1338
Scott AC (1970) Active and nonlinear wave propagation in electronics (chap 2, 5). Wiley-Interscience, New York
Shohet JL, Barmish BR, Ebraheem HK, Scott AC (2004) The sine-Gordon equation in reversed-field pinch experiments. Phys Plasmas 11:3877
Strogatz SH (1994) Nonlinear dynamics and chaos. Westview (Perseus Publishing Group), Reading, MA
Tricomi F (1931) Sur une équation differentielle de l’electrotechnique. C-R Acad Sci Paris 198:635
Tricomi F (1933) Integrazione di un’equation differenziale presentatasi in elettrotecnica. Ann Sc Norm Sup Pisa 2:1–20
Urabe M (1954) The least upper bound of a damping coefficient ensuring the existence of a periodic motion of a pendulum under a constant torque. J Sci Hiroshima Univ Ser A 18:379–389
Yoshizawa T (1966) Stability theory by Liapunov’s second method. The Mathematical Society, Japan
Acknowledgments
We are grateful to C. Nappi for information on the present state-of-the-art of research on the Josephson effect and for useful discussions. It is also a pleasure to thank Prof. A. D’Anna and P. Renno for their encouragement and stimulating observations. This research was partially supported by UniNA and Compagnia di San Paolo under the grant “STAR Program 2013”.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Proof of Proposition 1
Let \(0\le z_{0,2}<z_{0,1}, z_j(g):=z(g;g_0,z_{0,j};\mu ,\gamma )\) (\(j=1,2\)) be the corresponding solutions of (15) and \(G_j\) the corresponding intervals giving their (maximal) domains. By continuity the inequality
will hold in a neighbourhood of \(g_0\) within \(G_1\cap G_2\). In fact, it will hold for all \(g\in G_1\cap G_2\). If ad absurdum this were not the case, denote by \(\bar{g}\in G_1\cap G_2\) the least \(g>g_0\) (resp. largest \(g<g_0\)) where \(z_1-z_2\) vanishes: \(z_1(\bar{g})-z_2(\bar{g})=0\); then the problem (15) with initial (resp. final) condition \(z(\bar{g})=z_1(\bar{g})\equiv z_2(\bar{g})\) would admit the two different solutions \(z_1, z_2\), against the existence and uniqueness theorem. As for the monotonicity of \(g_{\pm }\), by the same theorem \(z_1(g_{2\pm })>z_2(g_{2\pm })=0\) implies \(g_{1+}>g_{2+}\) if \(g_{2+}<\infty \), otherwise \(g_{1+}=g_{2+}=\infty \), and \(g_{1-}<g_{2-}\) if \(g_{2-}>-\infty \), otherwise \(g_{1-}=g_{2-}=-\infty \). \(\square \)
Proof of Proposition 2
Let \(\mu _1\le \mu _2, \gamma _1\epsilon \ge \gamma _2\epsilon \), with one of the two inequalities being strict; for \(j=1,2\) let \(u_j(g):=u(g;g_0,u_0;\mu _j,\gamma )\) be the corresponding solutions of (15) with the same condition \(u_j(g_0) =u_0\), and \(G_j\) the intervals giving their (maximal) domains. We find
By the comparison principleFootnote 6 (see e.g. [42]) it follows, as claimed,
If \(\epsilon >0\), this implies: \(\lim _{g\downarrow g_{2+}}u_1(g)\ge \lim _{g\downarrow g_{2+}}u_2(g)=0\) and therefore \(g_{1+}\ge g_{2+}\) (the inequalities being strict as long as \(g_{2+}<\infty \)); \(\lim _{g\uparrow g_{1-}}u_2\ge 0\) and therefore \(g_{1,-}\ge g_{2-}\) (the inequalities being strict as long as \(g_{1-}>-\infty \)). Moreover, let \(g_j(\xi )=g(\xi ;g_0,u_0;\mu _j,\gamma _j)\) be the corresponding two solutions of (16), i.e. the solutions of (10). We find
while \(g_2(\xi _0)=g_0=g_1(\xi _0)\). By the comparison principle this implies as claimed \(g_2(\xi )<g_1(\xi )\) for all \(\xi \in X_1\cap X_2\). Similarly one argues if \(\epsilon <0\). \(\square \)
Proof of Proposition 3
Consider the Cauchy problem (15) in subsequent intervals \(]g_k,g_{k+1}[ \subset G\). Since the equation is invariant under \(g\rightarrow g+2\pi \), by Proposition 1 if \(z(g_1)\) is respectively larger, equal, smaller than \(z(g_0)\) then so are \(z(g_{k+1}),I_{k+1}\) in comparison with \(z(g_k),I_k\) respectively, for all \(k\in K\); in other words, the sequences \(\{z(g_k)\}, \{I_k\}\) are either constant, or strictly monotonic. Equation (21) follows from (19) applied in \(]g_k,g_{k+1}[\).
If \(\epsilon =-\), then rhs (21)\(>2\pi \gamma >0\) for any k, so that the sequences are strictly increasing and diverging as \(k\rightarrow \infty \), whereas K must have a lower bound, otherwise \(z(g_k)\) would become negative for sufficiently low k.
If \(\epsilon =+\), then the two terms at the rhs (21) have opposite sign and can compensate each other. If the sequences are strictly increasing, the sides of (21) are positive for all k and \(I_k<2\pi \gamma /\mu \). Applying (19) to the interval \([g_k,g_k+\Delta g]\) for any \(\Delta g\le 2\pi \) we find
But \(|U(g_k)-U(g_k+\Delta g)|\) is upper bounded, e.g. by \(2+2\pi \gamma \), whence
If ad absurdum \(z(g_k)\) diverged as \(k\rightarrow \infty \), then also \(z(g_k+\Delta g)\) and in turn \(I_k\) [by (20)] would diverge, in contrast with \(I_k<2\pi \gamma /\mu \); so it must converge. Moreover, as before, K must have a lower bound. On the other hand, rewriting (21) in the form \(z(g_{k-1})-z(g_k)=\mu I_{k-1}-2\pi \gamma \), we see that if the sequences \(\{z(g_k)\},\{I_k\}\) are strictly decreasing, the sides are positive for all k and larger than \( \mu I_0-2\pi \gamma >0\) for all negative k; this implies that they diverge as \(k\rightarrow -\infty \), and again by (67) so do \(z(g),I(z,g)\). Whereas they must either converge as \(k\rightarrow \infty \), or K must have an upper bound. \(\square \)
Rights and permissions
About this article

Cite this article
Fiore, G., Guerriero, G., Maio, A. et al. On kinks and other travelling-wave solutions of a modified sine-Gordon equation. Meccanica 50, 1989–2006 (2015). https://doi.org/10.1007/s11012-015-0143-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-015-0143-y