
Abstract
Context
Connectivity has become a top conservation priority in response to landscape fragmentation. Many methods have been developed to identify areas of the landscape with high potential connectivity for wildlife movement. However, each makes different assumptions that may produce different predictions, and few comparative tests against empirical movement data are available.
Objectives
We compared predictive performance of the most-used connectivity models, cost-distance and circuit theory models. We hypothesized that cost-distance would better predict elk migration paths, while circuit theory would better predict wolverine dispersal paths, due to alignment of the methods’ assumptions with the movement ecology of each process.
Methods
We used each model to predict elk migration paths and wolverine dispersal paths in the Greater Yellowstone Ecosystem, then used telemetry data collected from actual movements to assess predictive performance. Methods for validating connectivity models against empirical data have not been standardized, thus we applied and compared four alternative methods.
Results
Our findings generally supported our hypotheses. Circuit theory models consistently predicted wolverine dispersal paths better than cost-distance, though cost-distance models predicted elk migration paths only slightly better than circuit theory. In most cases, our four validation methods supported similar conclusions, but provided complementary perspectives.
Conclusions
We reiterate suggestions that alignment of connectivity model assumptions with focal species movement ecology is an important consideration when selecting a modeling approach for conservation practice. Additional comparative tests are needed to better understand how relative model performance may vary across species, movement processes, and landscapes, and what this means for effective connectivity conservation.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
Introduction
As humans continue to fragment natural habitats, conservation efforts have increasingly focused on maintaining connectivity among remaining habitat fragments, in many cases on grand scales (e.g., Yellowstone to Yukon Conservation Initiative, Great Eastern Ranges Initiative, Terai Arc Landscape, Mesoamerican Biological Corridor). This conservation focus has been bolstered by consensus that landscape connectivity will also be crucial for mitigating the impacts of climate change on biodiversity (Heller and Zavaleta 2009). In the mountain west of the United States, where land use expansion is eroding habitats for remaining wilderness-dependent species (i.e., those that generally avoid human-modified landscapes) such as elk, grizzly bears, and wolverine, conservation practitioners and wildlife managers often rely on models to identify areas with high potential connectivity (e.g., Craighead et al. 2001; Bates and Jones 2007; Montana Fish Wildlife and Parks 2011). Many modeling approaches have been developed for this purpose, but they differ in their formulation and assumptions and may also differ in their ability to identify important areas for conserving connectivity. Selecting the most appropriate model for a given application is expected to help ensure that limited resources are wisely invested and that the best opportunities for connectivity conservation are not lost to continued land use expansion. However, comparative empirical tests of alternative modeling approaches are currently limited (Poor et al. 2012; LaPoint et al. 2013; Cushman et al. 2014).
The term connectivity has come to encompass many concepts, but is most often defined as “the degree to which the landscape facilitates or impedes movement” (Taylor et al. 1993). When applied to movements of animals, this includes daily resource acquisition, seasonal migration, dispersal from natal ranges, and range shifts in response to disturbance such as climate change (Frankel and Soule 1981; Dingle 1996). Landscape connectivity for animal movement is not only species-specific, but also process-specific. A landscape supporting migration of one species may not support migration of another due to differences in habitat requirements and scale of habitat use (e.g., Sawyer et al. 2005). Similarly, a landscape supporting dispersal of a given species may not support daily travel among resources by the same species due to differential sensitivity to landscape features driven by the behavioral states underlying different movement processes (Ims 1995). This specificity is important when selecting a method for modeling connectivity because each method makes unique assumptions about the way in which animals perceive and move through the landscape. Consequently, each method may be more appropriate for modeling connectivity for some species and processes than it is for others.
The two most popular methods for modeling connectivity are cost distance models and circuit theory models (Rainey 2012). Cost distance models (least cost corridor models; e.g., Walker and Craighead 1997; Adriaensen et al. 2003; Coulon et al. 2008) are designed to minimize the tradeoff between travel distance among habitat patches and exposure to unsuitable habitat. Least cost paths offer the shortest cumulative cost-weighted distance between a source and destination across a surface representing landscape resistance to movement and are considered optimal travel routes. More broadly, the connectivity value of each cell in a landscape can be defined as the cost-weighted distance of the least costly path passing through it. Cost distance models assume that paths with the lowest cost-weighted distance offer the best chance for successful movement. Importantly, an implicit assumption that animals have complete knowledge of the landscape must be made if we are to predict that animals are most likely to select and use paths with the lowest cost-weighted distance. Cost distance models are most useful for identifying complete corridors between a source and destination that are most likely to support successful movement.
Circuit theory models (McRae 2006; McRae et al. 2008) apply concepts related to flow of charge through an electrical circuit to the movement of individuals through a landscape. They differ from cost-distance models in that they explicitly incorporate the assumption that greater redundancy in travel routes between a source and destination enhances flow between them. Cells in a landscape are treated as electrical nodes connected to neighboring cells by resistors, with resistance values defined, as in cost-distance models, by a model of the landscape’s resistance to movement. When current is passed through the circuit from a source location to a destination location, current values at each cell in the landscape represent the probability of a random walker passing through the cell as it moves from the source to the destination. Higher current densities are found at ‘pinch points’, where many potential paths condense to pass through a narrow area because few alternative paths are available. Total connectivity is predicted to increase with the number of available routes between a source and destination. Unlike cost distance models, circuit theory models assume that animals have no knowledge of the landscape beyond their immediate surroundings as defined by adjacent map cells. Circuit theory models are most useful for identifying pinch points, which are most critical to protect because they would disproportionately impact connectivity between a source and destination if movement through them was impeded.
In this study, our objective was to use telemetry data from migrating elk (Cervus elaphus) and dispersing wolverines (Gulo gulo) in the Greater Yellowstone Ecosystem (GYE) to test the ability of cost distance and circuit theory models to predict observed animal movement paths. We sought to determine which model most accurately predicts actual movements and whether relative performance varies with movement process (i.e., migration vs. dispersal). We hypothesized that cost distance models would better predict elk migration movements because elk migration paths are passed down through generations, route fidelity is high, and strong selection pressure is expected to drive elk to follow paths offering the best chance of arriving at seasonal home ranges in optimal condition (Boyce 1991; Irwin 2002). In contrast, we hypothesized that circuit theory models would better predict wolverine dispersal movements because landscapes encountered by juveniles venturing outside their natal range are entirely novel. Since good model performance may be defined differently across users and contexts, we used four validation metrics that capture different aspects of model performance and together give a more complete picture of the models’ predictive ability and utility. We conclude by discussing model predictions as they relate to focal species’ movement ecology and the information needs of conservation practitioners. This study is the first to evaluate the performance of multiple connectivity models using empirical data from multiple animal movement processes. Comparative evaluations are critical to better understanding how the link between movement ecology and connectivity model formulation affects model performance, and what this means for selection of appropriate methods for use in conservation practice.
Methods
Study area
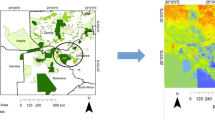
The study elk population is located in the western portion of the GYE and moves between summer habitats in the Madison Range and winter habitats in the Madison Valley (Fig. 1b; 111°17′53″W, 44°54′15″N). The wolverines studied originated in the GYE and moved in and surrounding the GYE (Fig. 1a; 109°49′23″ W, 43°16′42″N), which lies at the southern periphery of their current global distribution (Inman et al. 2012).

Areas of analysis for wolverine (a light grey) and elk (b hatched) in and surrounding the Greater Yellowstone Ecosystem (dark grey), which encompasses Yellowstone and Grand Teton National Parks (stippled). The extent of (b) is outlined in (a)
The GYE encompasses approximately 108,000 km2 of the Rocky Mountains across the states of Montana, Idaho, and Wyoming (Fig. 1). It includes the Yellowstone Plateau and 14 surrounding mountain ranges, with elevations ranging from 1400 to 4200 m. Precipitation increases with elevation and ranges from 32 to 126 cm per year (NOAA 2007). Snow most often falls as dry powder, and, at high elevations, may be present for at least 9 months of the year, reaching depths of more than 350 cm. Low elevation valleys are generally characterized by short-grass prairie and sagebrush communities, and lower elevation forests are typically dominated by lodgepole pine (Pinus contorta) or Douglas fir (Pseudotsuga menziesii), with Engelmann spruce (Picea engelmannii), subalpine fir (Abies lasiocarpa), and whitebark pine (Pinus albicaulis) increasing at higher elevations (Despain 1990). Forest communities are typically interspersed with grass, forb, and shrub meadows. Above the alpine tree line, alpine tundra or talus fields are present.
The GYE is centered on Yellowstone and Grand Teton National Parks and is composed primarily of public lands, including wildlife refuges, national forests, and Bureau of Land Management holdings. It is ringed by interstate highways (I-90, I-15) and crossed by several smaller United States highways (US-89, US-14, US-191, US-20). Most human settlements are found along these routes and generally consist of smaller towns (i.e., populations <10,000). There is significant agricultural land use in the valleys to the west and north of the GYE, including the Madison Valley where the study elk population is found. More intensive human impacts are found in areas surrounding the GYE, including larger human settlements (e.g., Billings, MT and Salt Lake City, UT) and extractive land uses (e.g., natural gas drilling).
Areas of analysis for elk and wolverine were defined by placing 5 and 200 km buffers, respectively, on minimum convex polygons containing all telemetry relocations available to this study. These buffers gave models reasonable “room to roam” and avoided imposing boundary effects on model predictions.
Focal species
Elk are highly adaptable mixed feeders, foraging on a variety of grasses, forbs, and shrubs (Cook 2002). Elk migrate seasonally between winter and summer ranges, primarily in response to shifting quality and accessibility of forage across the landscape driven by seasonal changes in vegetation and snow conditions (Irwin 2002). Migration distances of 2.4–150 km have been observed, and movements may span anywhere from several days to 8 weeks, with movement rates and use of stopover sites influenced by weather conditions (Skinner 1925), rates of vegetation green-up (Dalke et al. 1965), hunting pressure (Grigg 2007), and other biological requirements such as calving (Irwin 2002).
Wolverines are intrasexually territorial (Inman et al. 2012 and references therein), and natal dispersal moves juveniles out of maternal home ranges in search of new territories. Territory establishment is constrained to high, alpine areas that exist in island-like fashion (Copeland et al. 2010; Inman et al. 2013), but dispersal may take wolverines through low elevation areas that are not suitable for residence. Dispersal events are often preceded by exploratory movements beyond the maternal home range (Vangen et al. 2001; Inman et al. 2012). Dispersal distances of hundreds of kilometers have been observed, and have taken some individuals beyond GYE boundaries (Vangen et al. 2001; Inman et al. 2009).
Datasets
Our validation datasets consist of previously collected GPS and VHF telemetry data. Elk data were collected through a collaboration between Montana Fish, Wildlife and Parks and Montana State University (K. Hamlin and R. Garrott, Principal Investigators; Grigg 2007). A total of 45 adult female elk (C. elaphus) were fitted with GPS collars during the winters of 2005 and 2006. Collars were worn for approximately 1 year, and locations were recorded every 30 min. During this period, most collared individuals in this partially migratory population completed one round trip migration between winter ranges in the valley and summer ranges in the Madison range to the east. Although the collared individuals can be considered to have migrated as part of a herd, their migration paths are not as uniform as in some other migratory elk populations (e.g., the Dome Mountain population in Yellowstone National Park). Instead, they were observed to divide among four major drainages as they passed through the Madison range, and each individual’s path was unique at fine scales. Migratory movements were isolated from home range movements as described by Rainey (2012). Approximately 75 % of migratory relocations were used to fit seasonal habitat suitability models (Rainey 2012), leaving 1354 relocations from 12 individuals in the spring and 1617 relocations from 10 individuals in the fall for connectivity model validation in this study (Table 1).
Wolverine telemetry data were collected during 2001–2009 as part of a basic ecological study (Inman et al. 2012). Eight wolverines fitted with VHF implants (5 males, 3 females) were identified as dispersers. Four of these individuals (3 males, 1 female) were also fitted with GPS collars. VHF implants provided data for up to 3.5 years with a target relocation interval of 10 days. Actual relocation intervals ranged from several hours to several weeks, with some months-long gaps present for some individuals. GPS collars collected data for 3–12 months, with actual relocation intervals ranging from 1 h to 1 week. Some individuals completed a single long-distance dispersal movement, while others made multiple exploratory trips before either completing a successful move or remaining in their natal territory for the remainder of their tracking device’s lifespan. Because exploratory movements outside the natal range are understood to be important precursors to dispersal, all multi-day movements outside the mother’s territory demonstrating directionality were considered dispersal-related movements, including both departure and return trips. Dispersal-related movements were isolated from movements within maternal home ranges as described by Rainey (2012) and yielded a total of 390 relocations representing 18 movement paths of 8 individuals for connectivity model validation in this study (Table 2).
Modeling resistance to movement
Both cost-distance and circuit theory models run on a raster map estimating resistance to movement of the focal species across the landscape. Resistance is typically defined as the inverse of habitat suitability (Chetkiewicz and Boyce 2009). Habitat suitability may be estimated using a variety of methods, from expert scoring of the relative value and weight of categorical habitat attributes (e.g., Adriaensen et al. 2003; Larue and Nielsen 2008) to statistical models relating species occurrence point data to underlying landscape covariate values (e.g., Aarts et al. 2008; Coulon et al. 2008).
In this study, habitat suitability for spring and fall elk migration was modeled by fitting seasonal logistic discrimination functions (Keating and Cherry 2004; Pearce and Boyce 2006) to a subset of the Madison herd migration GPS collar dataset (29 females; Rainey 2012; see Supplementary Material). The models indicated that high suitability (low resistance) for spring migration was associated with low elevation, mild to moderate North- and West-facing slopes, intermediate vegetation greenness, low snow cover, low to moderate forest edge density, low to moderate road density, and open cover types on public lands (Rainey 2012). In fall, habitat most suitable for migration is associated with moderate elevations, mild to moderate slopes, low vegetation greenness, moderate snow cover, low to moderate forest edge density, low road density, and forest or shrub cover on forest service lands.
Inman et al. (2013) modeled wolverine habitat suitability using VHF telemetry data from non-dispersing individuals throughout the GYE. 2257 VHF telemetry relocations from 18 individuals (12 females, 6 males) were used to develop a logistic discrimination function (Keating and Cherry 2004; Pearce and Boyce 2006; see Supplemental Material). High suitability (low resistance) was associated with areas at high elevation with steep terrain, deep snow, low road density, low human population density, and which were closer to high elevation talus, tree cover, and areas with snow cover through April 1 (Inman et al. 2013). Although relocations collected during dispersal movements were not available to inform a dispersal-specific wolverine suitability model, wolverines are expected to preferentially disperse through primary habitat as identified by this model when available.
Landscape resistance maps for each focal species were calculated as the inverse of suitability such that highly suitable cells present low resistance to movement. This linear transformation method was selected because it is the most common among previously published analytical connectivity studies in which empirical data were used to derive a habitat suitability model (Zeller et al. 2012). These resistance surfaces served as the input maps for both cost-distance and circuit theory models.
Modeling connectivity
We selected telemetry relocations immediately preceding and following isolated migration and dispersal-related movement paths as the endpoints to be connected by cost distance and circuit theory models. Cost distance and circuit theory models were then used to predict each path in the validation datasets. Cost distance models were implemented using ESRI ArcMap Spatial Analyst tools, and circuit theory models were implemented in CircuitScape (McRae and Shah 2009).
Model validation
Several methods have been developed that validate connectivity model predictions by quantifying how well they align with telemetry data (Driezen et al. 2007; Pullinger and Johnson 2010; Poor et al. 2012). However no standard methodology has been established. We applied four validation metrics that together provide complementary measures of predictive success that are meaningful from both statistical and practical perspectives. These were (1) value at observed points, (2) random path comparison, (3) distance only model comparison, and (4) 95th percentile corridor.
Value at observed points
First, we sought to identify a metric that provides an objective, straightforward answer to the question: How well does the model agree with the data? We assume that if a model predicts movements well, most relocations will lie in map cells with high predicted connectivity values. Due to differences in the range and distribution of values generated by cost distance and circuit theory models, we first rescaled the predictive maps generated by each model to percentiles. We then determined the percentile value of each cell containing a telemetry relocation.
We compared values from cost distance and circuit theory models using a mixed effects linear regression model, which was fitted using the nlme package (Pinheiro et al. 2013) in R Core Team (2013). Percentile values were treated as the response variable, model (cost distance versus circuit theory) was treated as a categorical fixed effect, and relocations nested within individuals were treated as random effects. This model estimates the relative performance of each model while accounting for the nested structure of the data. It also provides an estimate of variance in performance among individuals and avoids biases due to unequal sampling among individuals.
Random path comparison
Our second metric was designed to answer the question: Do observed movements align with model predictions better than expected by chance? This is the most common general approach to connectivity model validation (e.g., Driezen et al. 2007; Cushman et al. 2014). For each model, we compared the percentile values of cells containing observed telemetry relocations to percentile values of cells containing points from randomized paths.
Random paths can be generated in a variety of ways. We chose an approach that produced paths with ecologically reasonable travel distances while minimizing subjective assumptions about what constitutes a plausible path. We first defined a sampling area as the circle circumscribing the start and end points of the observed path. This circle was then buffered by the maximum observed distance between consecutive relocations in the observed path. Random points were generated within the buffered circle, which we treat as samples from an otherwise unspecified path connecting migration start and end points in the same way that relocations are samples from a continuous migration path. The number of sampled points in each random path equaled the number of relocations in the observed path. For each individual, 99 random paths were generated. We then found the mean percentile value intersected by the observed path and by each random path, and identified the rank of the observed path mean in the distribution of random path means for each individual.
Distance-only model comparison
We next asked how much information each model provides to guide conservation action compared to distance-only models, which assume that animals are most likely to simply travel in a straight line without regard to habitat quality. We generated distance-only models by running cost-distance and circuit theory analyses on uniform resistance maps in which all cells were assumed to have equal suitability. We then compared differences between percentile values assigned to each point by our predictive models and distance-only models using a mixed effects model as described above.
95th percentile corridor
Lastly, we calculated an easily interpretable metric with direct relevance for conservation practitioners: If we were to designate a wildlife corridor as the portion of the landscape that is predicted to experience the highest rates of movement, how much of the target movement process would the corridor protect? As in Poor et al. (2012), we defined corridors as the most traversable 5 % of the landscape by selecting all cells with values above the 95th percentile. For each individual, we then determined the percentage of observed relocations that fell within 95th percentile corridors. We compared cost distance and circuit theory models using ratio estimation for unequal size cluster samples (Lohr 2010). Individuals were considered primary sampling units, and relocations nested within individuals comprised the secondary sampling units. This approach allowed calculation of standard errors on percentages that were appropriate to the sampling design.
Results
Elk
Cost-distance and circuit theory models produce generally similar predictions of elk migration paths (Fig. 2a–h). They tend to highlight the same areas as offering the highest potential connectivity, and they often highlight similar alternative paths that elk may instead follow (e.g., Fig. 2d, h). Some differences between the models’ predictions can be seen in the more diffuse patterns often produced by circuit theory models, particularly as potential paths approach the midpoint between the source and destination, where a greater variety of alternative paths is identified compared to cost distance models’ tendency to highlight a more uniform cluster of potential travel routes directly surrounding the least cost path. Six of the eight measures of model performance (four validation metrics in each of two seasons) suggest that cost-distance models outperform circuit theory models in predicting migration paths (Table 3). However, this trend is weak. Most tests either do not carry statistical significance or indicate that model performance differs by a very narrow margin, and two of eight tests indicate the reverse pattern in performance.

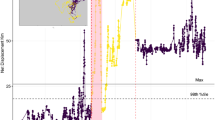
Model predictions for a representative subset of four elk migration paths from cost-distance (a–d) and circuit theory (e–h), and for a representative subset of four wolverine dispersal paths from cost-distance (i–l) and circuit theory (m–p), with the boundary of Yellowstone National Park shown for reference. Start- and endpoints of migration and dispersal paths (turquoise points), relocations along observed paths (black points), and the least cost path predicted by cost-distance models (turquoise line) are shown. Surfaces are displayed using a histogram-equalized color ramp based on the visible map extent
Mean values assigned to elk migratory relocations by cost-distance models were higher (better) than those assigned by circuit theory models both in spring (98.57 ± 0.615 SE vs. 98.35 ± 0.628 SE; p = 0.0152) and in fall (98.30 ± 1.056 SE vs. 97.13 ± 1.062 SE; p < 0.001). Because ranks of observed paths among random paths were highly skewed toward the top rank of 1, we report the percentage of observed paths receiving the top rank rather than mean ranks across individuals. In spring, cost-distance models assigned more observed paths the best rank of 1 than did circuit theory models (100 vs. 75 %). In fall, both models assigned 90 % of observed paths the top rank. Spring cost-distance models assigned elk relocations higher (better) mean percentile values than did a distance-only model, while circuit theory models assigned lower values (6.34 ± 0.853 SE higher vs. 1.79 ± 0.943 SE lower; p < 0.001). In fall, both cost-distance and circuit theory models were outperformed by distance only models (0.58 points ± 0.577 SE vs. 1.34 ± 0.581 SE lower; p < 0.001). 95th percentile corridors predicted by cost-distance models and circuit theory models did not differ significantly in the number of elk relocations captured in spring (80.3 % ± 13.42 SE vs. 82.2 % ± 7.63 SE; p = 0.895) or in fall (74.4 % ± 9.85 SE vs. 73.9 % ± 9.85 SE; p = 0.354).
Wolverine
In contrast, while cost-distance and circuit theory models suggest some of the same wolverine dispersal routes as potentially important, overall their predictions of potential connectivity for wolverines differ considerably (Fig. 2i–p). When wolverines cross areas of low suitability, cost-distance models tend to favor long, circuitous paths that track highly suitable habitat, while circuit theory models highlight small “stepping stone” patches of suitable habitat amidst highly resistant areas and predict high probabilities of movement through these patches as many possible paths converge on them (e.g., Fig. 2l, p). All four validation metrics indicate that circuit theory models outperform cost-distance models in predicting dispersal-related movements of wolverines (Table 4).
Cost-distance models assigned wolverine relocations lower (worse) mean percentile values than did circuit theory models (90.63 ± 1.671 SE vs. 97.88 ± 0.658; p < 0.001). However, this finding should be interpreted with some caution due to the skewed distribution of the individual random effect estimates. Cost distance-models assigned fewer observed paths the top rank among random paths than did circuit theory models (66.7 vs. 72.2 %). Cost-distance models were outperformed by distance-only models, while circuit theory models performed better than distance-only models (6.427 ± 1.0278 points lower vs. 1.64 ± 0.7023 points higher; p < 0.001). Finally 95th percentile corridors predicted by cost-distance models captured fewer wolverine relocations than did those predicted by circuit theory models, though this difference was not significant at the α = 0.05 level (55.64 % ± 14.867 vs. 86.92 % ± 6.974; p = 0.107).
Discussion
To our knowledge, this was the first study to simultaneously test predictions of multiple connectivity models against multiple movement processes using multiple validation metrics. Our hypotheses were generally supported, but some uncertainty remains in relative model performance. While circuit theory models clearly predicted wolverine dispersal movements better than cost-distance models, cost-distance models were only slightly and inconsistently better than circuit theory models in predicting elk migration movements. This may have been because elk generally traveled shorter distances than wolverines, providing less opportunity for paths predicted by cost-distance and circuit theory models to deviate. Elk habitat models also predicted a much more uniform distribution of resistance values than did the wolverine habitat model, which instead predicted a sharp distinction between core habitat areas and nonhabitat. This meant that both connectivity models predicted similar, fairly straight elk migration paths because little deviation from a straight line was needed for elk to remain in good habitat.
Our results, though based on a single example of migration and a single example of dispersal, reinforce the idea that it may be important to match a connectivity model’s assumptions and formulation with characteristics of the focal species and movement process of interest when selecting an approach for use in conservation planning. The observed tendency of cost-distance models to better predict elk migration paths, though weak, agrees with the results of Poor et al. (2012) showing that cost-distance models outperformed circuit theory models in predicting pronghorn migration routes. Together, these findings suggest that the cost-distance model’s assumption of perfect knowledge of the landscape may be a better fit to ungulate migration processes than circuit theory’s assumption of no knowledge of the landscape, although circuit theory models may offer complementary information for mapping pinch points within corridors identified using cost-distance models. This makes sense given that migration paths are passed down through generations, route fidelity from year to year is high, and ungulates are likely to experience strong selection pressure to follow optimal routes offering the best chance of reaching seasonal home ranges in good condition. Note, however, that ‘herd knowledge’ and multi-generation route fidelity may result in historical migration paths becoming suboptimal as landscapes change over time. Particularly in these cases, migratory relocation data are likely to be better used to directly delineate migration routes for conservation than to develop a model to serve this purpose. Although extrapolation of migratory relocation data to areas where data are not available in order to model migration routes may be informative, this should be undertaken with considerable caution given historical influences on migration path selection as well as potential differences in landscape characteristics.
Similarly, our findings strongly suggest that circuit theory models’ assumption of no knowledge of the landscape provide a better fit for wolverine dispersal through new landscapes than cost-distance models’ assumption of complete knowledge, a pattern that may apply to other dispersers as well. Several recent studies have used empirical data to validate circuit theory models (LaPoint et al. 2013; Braaker et al. 2014; Koen et al. 2014). However, they did not use dispersal data and only one study compared performance with cost-distance models, finding that circuit theory models predicted fisher movements among core habitat blocks within their home ranges better than cost-distance models (LaPoint et al. 2013). Together, this study and our findings suggest that circuit theory may have greater general applicability to a variety of movement processes, even when animals have knowledge of the landscape, than cost-distance models. However, relative model performance in our study may have been driven in part by the sharp contrast in resistance between primary habitat and non-habitat for wolverines. Further testing of circuit theory models against dispersal data from other species in other landscapes with different habitat requirements is needed.
Results from our four validation metrics were generally consistent, but some differences also emerged. The potential for obtaining different results from different metrics has important implications for choosing a validation approach. We suggest either using multiple metrics or carefully selecting the metric that best addresses the question or objective at hand. Some metrics are more appropriate from a statistical perspective, while others are better suited to practical interpretation. For conservation applications, we suggest that comparing connectivity model predictions to a distance-only model and determining the percentage of relocations that fall within a defined corridor are the most relevant and interpretable metrics. Comparing multiple criteria for defining a corridor (e.g., 95th percentile versus 99th percentile as in Poor et al. 2012) may be useful for understanding how corridor extent affects the proportion of the movement of interest that is protected, as well as how sensitive the validation results are to corridor extent. Note that the most used metric in previous validation studies is comparison with random paths, which offers perhaps the least direct practical relevance for conservation practitioners.
We show that elk and wolverine generally moved through areas of the landscape predicted to offer the highest potential connectivity by cost-distance and circuit theory models, respectively, and that most portions of each path would be protected by a corridor defined as the most traversable portions of the landscape. Both models generally (but not always) outperform distance-only models, and their predictions align better with observed paths than random paths. But whether a model is good enough to be useful for conservation planning depends on the focal species, the movement process, and the conservation objective. A model is likely to be useful in helping to focus future research and monitoring efforts in the most promising areas, but not for making a final decision concerning the boundaries of a corridor to be designated and protected on the ground. Dispersal paths are more spatially variable than migration routes, so criteria for acceptable model performance based on validation against dispersal data may need to be relaxed relative to criteria based on validation against migration data. Greater precision may be needed to identify corridors for species with very specific habitat requirements than for generalist species. We suggest that practitioners should clearly define their information needs and set realistic expectations for connectivity model predictive performance.
While our results indicate that a good match between connectivity model assumptions and focal species movement ecology is likely to be important, conservation practitioners and managers are rarely interested in maintaining connectivity for only a single species. Connectivity models are often applied in a non-species specific way, making general assumptions about habitat characteristics that are likely to be suitable for many species (e.g., low degree of human modification or intact forest cover). These models have rarely been tested against empirical data representing occurrence or movement of particular species (but see Koen et al. 2014). Limited preliminary comparisons of multi-species and species-specific model predictions suggest some promise in these approaches, at least for some species guilds (Ament et al. 2014; Krosby et al. 2015), and new methods may be particularly appropriate for predicting landscape connectivity for multiple species and processes (e.g., Cushman and Landguth 2012; Theobald et al. 2012; Pelletier et al. 2014). Empirical validation of novel methods, especially when used to predict connectivity for multiple species, is needed (e.g., Koen et al. 2014). Until the performance of these approaches is better understood, multiple species-specific models should be fitted and overlaid as data and other resources allow (e.g., Washington Wildlife Habitat Connectivity Working Group 2010; Montana Fish Wildlife and Parks 2011), with careful thought given to the method chosen for each.
We emphasize that any connectivity model is only as good as the resistance surface on which it is based. In this study, we use a single resistance surface derived from empirical movement data for each species (and each migration season) to drive connectivity models. Previous studies have consistently shown that resistance surfaces derived from empirical data produce better connectivity model predictions than resistance surfaces parameterized by expert opinion (Clevenger and Wierzchowski 2002; Pullinger and Johnson 2010; Poor et al. 2012), and a recent study showed that sites at which black bears crossed roads were predicted more accurately by connectivity models run on a resistance surface developed from movement data than one developed from genetic data (Cushman et al. 2014). However, the transformation used to derive resistance maps from suitability values is expected to be an important parameter in the modeling process that may affect the quality of corridor predictions (e.g., Koen et al. 2012; Braaker et al. 2014; Mateo-Sánchez et al. 2015), along with other decisions such as the selection of habitat covariates for modeling resistance, the scale at which habitat selection is modeled, and the habitat suitability model structure employed. We expect that deeper understanding of what drives resistance of a landscape to movement of a focal species, how resistance of a given landscape varies depending on the focal species’ movement process or behavioral state, and how our formulation of resistance and connectivity models affect predictions of potential connectivity will yield greater success in defining corridors. Sensitivity analyses exploring the impacts of the many decisions made in the connectivity modeling process are needed to quantify uncertainty in connectivity model predictions and to highlight which decisions have the greatest impacts on model performance (e.g., Rayfield et al. 2009; Koen et al. 2012; McClure & Hansen in prep.).
Conclusion
Connectivity modeling approaches too often appear to be selected based on popularity or ease of use. We urge users of connectivity models to more critically and explicitly examine the links between model assumptions and the movement processes they are intended to represent. Choosing the right tool for the job is crucial in developing connectivity conservation strategies that are transparent and justifiable to stakeholders, and to ensuring that limited conservation resources are directed toward places that are the most likely to successfully support critical wildlife movement processes.
Ultimately, connectivity models are just one step in a much larger process of planning and implementing connectivity conservation on the ground. Connectivity models alone do not provide simple solutions to the problem of how best to conserve and manage connected landscapes. Rather, they are tools capable of providing useful information to a planning process that is uniquely defined by the agencies or organizations involved, land tenure across the target landscape, budgetary restrictions, sociopolitical context, and other considerations. The accuracy of connectivity model predictions is one factor among many that will affect the success of connectivity conservation, albeit an important one. We expect the value of connectivity models to conservation planning processes to increase with improved understanding of their strengths, shortcomings, and variability across the diverse circumstances under which they are used.
References
Aarts G, MacKenzie M, McConnell B, Fedak M, Matthiopoulos J (2008) Estimating space-use and habitat preference from wildlife telemetry data. Ecography 31:140–160
Adriaensen F, Chardon JP, De Blust G, Swinnen E, Villalba S, Gulinck H, Matthysen E (2003) The application of “least-cost” modelling as a functional landscape model. Landsc Urban Plan 64:233–247
Ament RA, McGowen P, McClure ML, Rutherford A, Ellis C, Grebenc J (2014) Highway mitigation for wildlife in Northwest Montana. Sonoran Institute, Bozeman. http://largelandscapes.org/media/publications/Highway-Mitigation-Wildlife-NW-Montana_1.pdf
Bates W, Jones A (2007) Least-cost corridor analysis for evaluation of lynx habitat connectivity in the Middle Rockies. The Nature Conservancy, Salt Lake City
Boyce M (1991) Migratory behavior and management of elk (Cervus elaphus). Appl Anim Behav Sci 29:239–250
Braaker SB, Moretti MM, Boesch RB, Ghazoul J, Obrist MK, Bontadina F (2014) Assessing habitat connectivity for ground-dwelling animals in an urban environment. Ecol Appl 24:1583–1595
Chetkiewicz C-LB, Boyce MS (2009) Use of resource selection functions to identify conservation corridors. J Appl Ecol 46:1036–1047
Clevenger A, Wierzchowski J (2002) GIS-generated, expert-based models for Identifying Wildlife Habitat Linkages and Planning Mitigation Passages. Conserv Biol 16:503–514
Cook J (2002) Nutrition and food. In: Toweill D, Thomas J (eds) North American elk: ecology and management. Smithsonian Institution Press, Washington D.C., pp 259–349
Copeland JP, McKelvey KS, Aubry KB, Landa A, Persson J, Inman RM, Krebs J, Lofroth E, Golden H, Squires JR, Magoun A, Schwartz MK, Wilmot J, Copeland CL, Yates RE, Kojola I, May R (2010) The bioclimatic envelope of the wolverine (Gulo gulo): do climatic constraints limit its geographic distribution? Can J Zool 88:233–246
Coulon A, Morellet N, Goulard M, Cargnelutti B, Angibault JM, Hewison AJM (2008) Inferring the effects of landscape structure on roe deer (Capreolus capreolus) movements using a step selection function. Landscape Ecol 23:603–614
Craighead L, Craighead A, Roberts EA (2001) Bozeman Pass wildlife linkage and highway safety study. Proceedings of the 2001 International Conference on Ecology and Transportation. North Carolina State University, Raleigh, pp 405–422
Cushman S, Lewis J, Landguth E (2014) Why did the bear cross the road? Comparing the performance of multiple resistance surfaces and connectivity modeling methods. Diversity 6:844–854
Cushman SA, Landguth EL (2012) Multi-taxa population connectivity in the Northern Rocky Mountains. Ecol Modell 231:101–112
Dalke PD, Beeman RD, Kindel FJ, Robel RJ, Williams TR (1965) Seasonal movements of elk in the Selway River drainage, Idaho. J Wildl Manag 29:333–338
Despain D (1990) Yellowstone vegetation: consequences of environment and history in a natural setting. Roberts Rinehard Publishers Inc, Boulder
Dingle H (1996) Migration: the biology of life on the move. Oxford University Press, New York
Driezen K, Adriaensen F, Rondinini C, Doncaster CP, Matthysen E (2007) Evaluating least-cost model predictions with empirical dispersal data: a case-study using radiotracking data of hedgehogs (Erinaceus europaeus). Ecol Model 209:314–322
Frankel OH, Soule ME (1981) Nature reserves. In: Frankel OH, Soule ME (eds) Conservation and evolution. Island Press, Washington, DC, pp 97–132
Grigg JL (2007) Gradients of predation risk affect distribution and migration of a large herbivore. Montana State University, Thesis
Heller NE, Zavaleta ES (2009) Biodiversity management in the face of climate change: a review of 22 years of recommendations. Biol Conserv 142:14–32
Ims RA (1995) Movement patterns related to spatial structures. Mosaic landscapes and ecological processes. Chapman & Hall, London, pp 85–109
Inman RM, Brock BL, Inman KH, Sartorius SS, Aber BC, Giddings B, Cain SL, Orme ML, Fredrick JA, Oakleaf BJ, Alt KL, Odell E, Chapron G (2013) Developing priorities for metapopulation conservation at the landscape scale: wolverines in the Western United States. Biol Conserv 166:276–286
Inman RM, Packila ML, Inman KH, Aber B, Spence R, McCauley D (2009) Greater Yellowstone Wolverine Program Progress Report. Ennis, Montana
Inman RM, Packila ML, Inman KH, McCue AJ, White GC, Persson J, Aber BC, Orme ML, Alt KL, Cain SL, Fredrick JA, Oakleaf BJ, Sartorius SS (2012) Spatial ecology of wolverines at the southern periphery of distribution. J Wildl Manag 76:778–792
Irwin L (2002) Migration. In: Toweill DE, Thomas JW (eds) North American elk: Ecology and Management. Smithsonian Institution Press, Washington D.C., pp 493–513
Keating K, Cherry S (2004) use and interpretation of logistic regression in habitat-selection studies. J Wildl Manag 68:774–789
Koen EL, Bowman J, Sadowski C, Walpole AA (2014) Landscape connectivity for wildlife: development and validation of multi-species linkage maps. Methods Ecol Evol 5(7):626–633
Koen EL, Bowman J, Walpole AA (2012) The effect of cost surface parameterization on landscape resistance estimates. Mol Ecol Resour 12:686–696
Krosby M, Breckheimer I, Pierce DJ, Singleton PH, Hall SA, Halupka KC, Gaines WL, Long RA, McRae BH, Cosentino BL, Schuett-Hames JP (2015) Focal species and landscape “naturalness” corridor models offer complementary approaches for connectivity conservation planning. Landscape Ecol 30(10):2121–2132
LaPoint S, Gallery P, Wikelski M, Kays R (2013) Animal behavior, cost-based corridor models, and real corridors. Landscape Ecol 28:1615–1630
Larue MA, Nielsen CK (2008) Modelling potential dispersal corridors for cougars in midwestern North America using least-cost path methods. Ecol Model 212:372–381
Lohr SL (2010) Sampling: Design and Analysis. Brooks/Cole, Boston
Mateo-Sánchez MC, Balkenhol N, Cushman S, Perez T, Dominguez A, Saura S (2015) A comparative framework to infer landscape effects on population genetic structure: are habitat suitability models effective in explaining gene flow? Landscape Ecol 30(8):1405–1420
McRae B (2006) Isolation by resistance. Evolution 60:1551–1561
McRae B, Dickson B, Keitt T, Shah V (2008) Using circuit theory to model connectivity in ecology, evolution, and conservation. Ecology 89:2712–2724
McRae B, Shah V (2009) Circuitscape user guide. University of California, Santa Barbara
Montana Fish Wildlife and Parks (2011) Montana Connectivity Project: a statewide analysis. Final report. Helena, Montana
National Oceanic and Atmospheric Administration (NOAA) (2007) Western Regional Climate Center. Historic temperature and precipitation data for Ennis, Montana, 1948–2006. http://www.wrcc.dri.edu/index.html. Accessed Jan 2007
Pearce JL, Boyce MS (2006) Modelling distribution and abundance with presence-only data. J Appl Ecol 43:405–412
Pelletier D, Clark M, Anderson MG, Rayfield B, Wulder M, Cardille JA (2014) Applying circuit theory for corridor expansion and management at regional scales: tiling, pinch points, and omnidirectional connectivity. PLoS ONE 9:e84135
Pinheiro J, Bates D, Debroy S, Sarkar D, R Core Team (2013) nlme: linear and nonlinear mixed effects models. R package version 3.1-122. https://cran.r-project.org/web/packages/nlme/nlme.pdf
Poor EE, Loucks C, Jakes A, Urban DL (2012) Comparing habitat suitability and connectivity modeling methods for conserving pronghorn migrations. PLoS ONE 7:e49390
Pullinger MG, Johnson CJ (2010) Maintaining or restoring connectivity of modified landscapes: evaluating the least-cost path model with multiple sources of ecological information. Landscape Ecol 25:1547–1560
R Core Team (2013) R: a language and environment for statistical computing. R Foundation for Statistical Computing, Vienna. https://www.R-project.org
Rainey M (2012) Validating alternative methods of modeling wildlife corridors using relocation data from migrating elk and dispersing wolverines. Dissertation, Montana State University
Rayfield B, Fortin M-J, Fall A (2009) The sensitivity of least-cost habitat graphs to relative cost surface values. Landscape Ecol 25:519–532
Sawyer H, Lindzey F, McWhirter D (2005) Mule deer and pronghorn migration in western Wyoming. Wildl Soc Bull 33:1266–1273
Skinner AMP (1925) Migration routes of elk in Yellowstone National Park. J Mammal 6:184–192
Taylor PD, Fahrig L, Henein K, Merriam G (1993) Connectivity is a vital element of landscape structure. Oikos 68:571–573
Theobald DM, Reed SE, Fields K, Soulé M (2012) Connecting natural landscapes using a landscape permeability model to prioritize conservation activities in the United States. Conserv Lett 5:123–133
Vangen KM, Persson J, Landa A, Andersen R, Segerstrom P (2001) Characteristics of dispersal in wolverines. Can J Zool 79:1641–1649
Walker R, Craighead L (1997) Analyzing wildlife movement corridors in Montana using GIS. In: ESRI user conference, San Diego, pp 8–11
Washington Wildlife Habitat Connectivity Working Group (2010) Washington connected landscapes project: statewide analysis. Washington Departments of Fish and Wildlife, and Transportation, Olympia. http://wdfw.wa.gov/publications/01324/wdfw01324.pdf
Zeller KA, McGarigal K, Whiteley AR (2012) Estimating landscape resistance to movement: a review. Landscape Ecol 27(6):777–797
Acknowledgments
This work was supported by a Montana Space Grant Consortium Fellowship to M. McClure. The funding had no role in study design; collection, analysis, and interpretation of data; the writing of the report; or in the decision to submit the article for publication. The authors wish to thank J. Gude and K. Proffitt for providing elk GPS collar data; S. Cherry, S. Creel, J. Hilty, and D. Theobald for guidance and advice; and J. Williams for assistance with figure layouts. We are grateful to A. Carlson, C. Davis, N. Piekielek, and M. Vance for feedback on drafts of the manuscript.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article

Cite this article
McClure, M.L., Hansen, A.J. & Inman, R.M. Connecting models to movements: testing connectivity model predictions against empirical migration and dispersal data. Landscape Ecol 31, 1419–1432 (2016). https://doi.org/10.1007/s10980-016-0347-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-016-0347-0