
Abstract
Resistance surfaces are often used to fill gaps in our knowledge surrounding animal movement and are frequently the basis for modeling connectivity associated with conservation initiatives. However, the methods for quantifying resistance surfaces are varied and there is no general consensus on the appropriate choice of environmental data or analytical approaches. We provide a comprehensive review of the literature on this topic to highlight methods used and identify knowledge gaps. Our review includes 96 papers that parameterized resistance surfaces (sometimes using multiple approaches) for a variety of taxa. Data types used included expert opinion (n = 76), detection (n = 23), relocation (n = 8), pathway (n = 2), and genetic (n = 28). We organized the papers into three main analytical approaches; one-stage expert opinion, one-stage empirical, and two-stage empirical, each of which was represented by 43, 22, and 36 papers, respectively. We further organized the empirical approaches into five main resource selection functions; point (n = 16), matrix (n = 38), home range (n = 3), step (n = 1), and pathway (n = 1). We found a general lack of justification for choice of environmental variables and their thematic and spatial representation, a heavy reliance on expert opinion and detection data, and a tendency to confound movement behavior and resource use. Future research needs include comparative analyses on the choice of environmental variables and their spatial and thematic scales, and on the various biological data types used to estimate resistance. Comparative analyses amongst analytical processes is also needed, as well as transparency in reporting on uncertainty in parameter estimates and sensitivity of final resistance surfaces, especially if the resistance surfaces are to be used for conservation and planning purposes.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Understanding animal movement is crucial for developing effective landscape-level conservation initiatives. Successful movement of animals across the landscape may fulfill a number of biological processes, including foraging, mating, migration, dispersal and gene flow, and is especially critical in allowing individuals and populations to adjust (e.g., redistribute) to a changing environment. However, animal movement is one of the most difficult behaviors to observe and quantify. When movement can be assessed, the number of individuals being studied is often small, and/or there may be large gaps of time between successive point locations along a movement path. Resistance to movement values are typically used to fill this gap in movement knowledge by providing a quantitative estimate of how environmental parameters affect animal movement. In this context, ‘resistance’ represents the willingness of an organism to cross a particular environment, the physiological cost of moving through a particular environment, the reduction in survival for the organism moving through a particular environment, or an integration of all these factors. Resistance estimation is most commonly accomplished by parameterizing environmental variables across a ‘resistance’ or ‘cost’ to movement continuum, where a low resistance denotes ease of movement and a high resistance denotes restricted movement, or is used to represent an absolute barrier to movement. ‘Friction’ and ‘impedance’ to movement or their inverse, ‘permeability’ and ‘conductivity’ to movement are also terms used to describe these travel surfaces (Singleton et al. 2002; Chardon et al. 2003; Sutcliffe et al. 2003). For simplicity, the term ‘resistance surface’ will be used to describe these movement surfaces for the remainder of the paper.
The use of resistance surfaces in landscape ecology and conservation biology has increased over the last decade. In particular, resistance surfaces are used in metapopulation and corridor studies to represent the landscape between populations or habitat patches. These studies have matured from simple ‘isolation-by-distance’ or ‘isolation-by-barrier’ hypotheses to recognizing that animal movement between populations is influenced by the varying environmental conditions an individual encounters as it moves through a landscape (Ferreras 2001; Adriaensen et al. 2003). This is typically referred to as ‘isolation-by-resistance’ (McRae 2006). Resistance surfaces are a quintessential element to contemporary landscape genetics studies focused on assessing how landscape structure affects the flow of genes across the landscape (Manel et al. 2003; Spear et al. 2010).
Myriad methods have been used to model landscape resistance to movement. Techniques range from very basic and data-light to complex and data-heavy. Moreover, no general consensus has been reached regarding the most accurate data sources and analytical methods for modeling resistance surfaces (Spear et al. 2010). A summary of the methods used and their pros and cons is needed in order to frame the current state of knowledge surrounding resistance surface modeling and provide guidance for future research. Here, we provide a comprehensive literature review of the data sources and analytical methods used for deriving resistance surfaces. We discuss common techniques, highlight unique approaches, and consider the strengths and weaknesses of these methods. Finally, we discuss directions for future research and methodological improvement.
Methods
We focused our literature review on papers that dealt explicitly with estimating resistance to movement values for wildlife. We searched for papers in the ISI Web of Science (ISI 2011) with the following search criteria from January 2000 to June 2011: Topic = (resistance OR cost OR effective distance OR landscape permeability) AND (corridor* OR connect* OR wildlife OR linkage); this resulted in 1,343 papers. We refined our results by restricting the search to the following subject areas: Genetics and Heredity, Biochemistry and Molecular Biology, Ecology, Environmental Sciences, Multidisciplinary Sciences, Environmental Studies, Zoology, Biology, Evolutionary Biology, Veterinary Sciences, Biodiversity Conservation, Forestry, Agriculture, Dairy and Animal Science, Management, Marine and Freshwater Biology, Entomology, Geography, Fisheries, Oceanography, Remote Sensing, and Ornithology. This restricted the result to 693 papers, which we further refined by excluding papers which were simulation exercises only, did not deal explicitly with wildlife, and/or did not estimate resistance values. This resulted in our final sample of 96 papers distributed across 26 different journals. We purport that, although this is not a full census of papers on resistance, the final set of papers we reviewed represent a comprehensive survey of current methods used to estimate resistance to movement for wildlife.
To summarize each paper, we recorded the following information: taxonomy and number of target species, number and type of environmental variables, grain and extent of analysis, type of biological input data, analytical approach, type of resource selection function (RSF), and final range of resultant resistance values (Appendix 1 in electronic supplementary material). We distinguished among five types of biological input data: (1) expert opinion, (2) detection data, (3) relocation data, (4) pathway data, and (5) genetic data, as defined below (“Biological data” section). We refer to ‘analytical approach’ as the analytical method(s) by which the environmental variables were interpreted and transformed into a final resistance surface. In this regard, we distinguished among three analytical approaches: (1) ‘one-stage expert approach’, in which the final resistance surface was derived in a single step based solely on expert opinion; (2) ‘one-stage empirical approach’, in which the final resistance surface was derived in a single step based on the analysis of biological data; and (3) ‘two-stage empirical approach’, in which a set of alternative resistance models were created based on expert opinion and/or the analysis of biological data in the first stage, followed by model selection based on the analysis of biological data in the second stage. We also distinguished among five types of RSFs that were used within the one-stage and two-stage empirical approaches: (1) point selection function (PSF), (2) home range selection function (HSF), (3) matrix selection function (MSF), (4) step selection function (SSF), and (5) path selection function (PathSF), as defined below (“Resource selection functions” section). Lastly, although we reviewed 96 papers, several papers used more than one biological input data type or analytical approach. Consequently, we refer to the number of ‘instances’ in the text and tables, rather than number of papers, as appropriate.
Results and discussion
Overview of modeling resistance surfaces
We provide a brief outline of the resistance surface modeling process as background for interpreting the literature review (Fig. 1).

Biological data types and analytical processes commonly used to derive resistance surfaces
In step one of the modeling process, one or more environmental variables are selected that are either known or assumed to influence movement of a target species. These variables are represented with geospatial layers that are either developed for the study area or are readily available. The geospatial layers are then scaled appropriately (e.g., resampled to a coarser spatial resolution) to the species/phenomenon of interest and are represented either as raw data, classified into a desired set of classes (e.g., land cover classes), or transformed using various functions (e.g., Gaussian transformation of elevation).
In step two, biological data on which the estimation of resistance values will be based are chosen and may include detection data (i.e., presence-only or presence–absence points), relocation data (e.g., capture–recapture), pathway data (i.e., travel paths), genetic data (i.e., genotypes of individuals), or a combination of these types. If empirical data are lacking, then expert opinion can be used in its place.
Once environmental and biological data are in hand, step three involves selecting an analytical approach by which to estimate resistance values. If biological data are unavailable, then an expert-only approach must be used and there is no analytical process per se. If biological data are available, the type of biological data will usually drive the selection of the analytical approach. However, the analytical approach may be chosen first and then the biological data collected to meet the requirements of the model. In either case, the analytical approach usually entails selecting an appropriate RSF given the type of biological data and researcher preference. In addition, the approach selected may include two stages: first to derive a set of candidate resistance surfaces, and second to select the “best” of the candidates.
In step four, once the resistance values are estimated, a final resistance surface is created by applying the results to the grids of the previously selected environmental variables. Depending on the biological data and analytical approach employed and the intended use of the resistance surface (e.g., corridor design, population modeling), multiple resistance surfaces (e.g., to reflect model uncertainty) may be retained for use in the subsequent application. However, some studies are only interested in assessing the degree to which environmental variables may be affecting movement and thus do not develop a ‘final’ resistance surface.
Taxonomic bias
Eight taxonomic classes, 25 orders, and 59 families were represented in our sample (Table 1). The Mammalia class (86 % of studies), the Carnivora order (46 % of studies), and the Felidae family (17 % of studies) were the most highly represented. Four studies used generic species as a proxy for real species (Adriaensen et al. 2003; Rae et al. 2007; Pinto and Keitt 2009; Watts et al. 2010). Of the 14 studies that modeled more than one species, resistance values were modeled separately for each species in 10 of the studies and were combined into a single resistance model in four of the studies. Not surprisingly, large and charismatic species of conservation concern were the focus of the majority of studies, although amphibians were also represented surprisingly well, while birds and invertebrates were less often the focus.
Environmental variables
Estimates of resistance to movement are predicated on the choice of environmental variables, and the choice of both thematic and spatial scale (grain and extent) for representing those variables. Despite the universal importance of these choices, there was surprisingly little attention given to the selection and representation of environmental variables in the majority of the studies reviewed. Thirty-nine different environmental variables were used to model resistance (Table 2). Land use/land cover was the most widely used variable, followed by roads, elevation, hydrology, and slope. In 36 studies, only a single environmental variable was used, in 54 studies two to five variables were used, and in the remaining six studies, 6–10 variables were used. In these multi-variable studies, with one exception (Wasserman et al. 2010), variables were combined after analyzing the variables individually or fit simultaneously in the statistical model (e.g., via multiple logistic regression) to produce a single resistance surface.
With regards to the choice of environmental variables, ideally only those variables that are believed to have an influence on the movement of the target species are included, but more often than not, this type of a priori knowledge is lacking. Furthermore, environmental variables may be chosen as a proxy for landscape characteristics that an individual actually perceives and responds to as it moves through the landscape. For example, if understory cover is not available as an environmental layer, secondary forest cover may be used as a proxy. However, in a review of least-cost models, Sawyer et al. (2011) criticized the use of proxies for landscape features that may affect animal movement due to weaknesses in predictive power.
In addition, the source and accuracy of environmental data varies widely among studies. Spatial data are sometimes collected via GPS units with varying degrees of accuracy, but the majority of spatial environmental data come from remotely-sensed (RS) satellite or aerial imagery, typically using either a manual “heads-up” mapping approach or a semi-automated classification method. Acceptable error rates (if error rates are assessed at all) in layers derived from RS imagery are not standardized (Loveland et al. 2000), and although the target of most classifications is 85 % correct classification, many fall short of that goal (Foody 2002). Because image interpretation takes specialized software and training, the majority of papers reviewed chose to use extant environmental data. Unfortunately, these extant data are typically derived from imagery that is years, if not decades, old. In study areas where the environmental variables have remained mostly constant during this time-lag, this may not be a problem, but in more dynamic study areas, temporal appropriateness of the data must be scrutinized. When using RS data to derive habitat characteristics, seasonality must also be considered, especially in areas that have pronounced wet and dry seasons, or with species that exhibit distinct ecological differences from one season to the next. Although the availability of timely and affordable RS images and associated environmental layers is increasing, this will likely remain an issue for layers that are only periodically updated like roads, housing, and census data.
To avoid errors associated with RS and GPS spatial data, one approach is to limit data layers to those with consistent and high accuracy rates. In the papers reviewed, nine studies restricted environmental variables to topographic variables like slope (Epps et al. 2007), aspect (Clark et al. 2008), bathymetry (Flamm et al. 2005), or elevation (Vignieri 2005) that were presumably more accurate than interpreted variables like vegetation cover. Another approach is to evaluate the environment within a buffer around each animal detection or movement pathway, where the buffer encompasses the positional error of the data (Adriaensen et al. 2003; Braunisch et al. 2010). Though these inaccuracies cannot, at the moment, be avoided, they should at least be acknowledged in studies of this type (Beier et al. 2008).
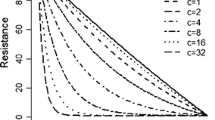
With regard to the choice of thematic scale for representing environmental variables, 65 of the papers reviewed used only categorical variables, 24 used a combination of categorical and continuous variables, and seven used only continuous variables (Table 2). In many cases, the thematic scale chosen differed from the scale of the raw data. There are myriad ways to transform the scale of the raw data to more appropriately represent how the target species perceives an environmental attribute. For example, discrete data such as points (e.g., houses) and lines (e.g., roads) can be transformed into a continuous surface by calculating the distance to the nearest feature or computing a kernel density estimate of the feature (Cushman and Lewis 2010). Categorical data can be altered by aggregating similar categories into a reduced number of classes (O’Brien et al. 2006). Continuous data can be converted into categorical data by binning it into ranges, although this should be done with caution as this can lead to bias and introduce artificial boundaries not perceived by the target species (McGarigal and Cushman 2005; Cushman and Landguth 2010). Lastly, continuous environmental data can be transformed using various mathematical functions (e.g., Gaussian, linear or power functions), often to reflect nonlinear relationships between the species and the environmental gradient (Cushman et al. 2006). Despite the myriad ways to transform the thematic scale of environmental data, in the studies reviewed, transformations were generally applied arbitrarily and without explicit consideration of their potential influence on the results. Indeed, only a handful of the studies in our review objectively compared alternative thematic scales of the same environmental variable.
With regards to the choice of spatial scale (grain and extent) for representing environmental variables, there was extreme variability among the studies reviewed; grain size ranged over four orders of magnitude (1 m to 50 km) (Table 2). Many studies simply adopted the grain of the source data (e.g., 30 m for land cover derived from Landsat imagery) without explicitly considering whether the grain should have been coarsened for the application. Ideally, grain size should be determined based on the scale at which the target species perceives and responds to heterogeneity in the environment (Wiens 1989). Estimates of this functionally relevant scale are typically based on expert opinion and/or previous autecological studies (Cushman et al. 2010), but objective methods can be used to determine the optimum grain size—at least above the lower limit set by the source data—when biological data are available (Thompson and McGarigal 2002). Surprisingly, only six of the papers reviewed adopted this approach (McRae and Beier 2007; Rae et al. 2007; Broquet et al. 2009; Koscinsky et al. 2009; Murphy et al. 2010; Nichol et al. 2010), and they often reached different conclusions regarding the best grain size, illustrating the point that one scale does not fit all species and that the finest scale available is not always the best scale for the target species. In addition, species may be responding to different environmental cues at different scales (Thompson and McGarigal 2002). Therefore, it may be more appropriate to identify the optimum grain for each environmental variable separately and to combine the results in the final resistance surface, as was done by Jaquiery et al. (2011), rather than try to find a single “optimum” grain for all variables.
Study area extent ranged over six orders of magnitude (2.36 km2 to 3.2 million km2) in the studies reviewed (Table 2, Appendix 1 in electronic supplementary material). Study area extent is usually driven by research objectives; however, it is worth noting that choice of extent may influence the estimation of resistance values. For example, Short Bull et al. (2011) used genetic data to estimate resistance for black bears across 12 different study areas with different extents. The optimal resistance surface varied by study area. Attention must also be paid to choice of study area boundary. Koen et al. (2010) cautioned that the hard edges of study areas may cause a bias in the estimate of resistance values and recommended placing buffers at the edges of map boundaries to avoid these boundary effects.
Biological data
Perhaps the most obvious difference among the studies reviewed was the type of biological data used, which included: (1) expert opinion, (2) detection data, (3) relocation data, (4) pathway data, and (5) genetic data (Table 3). Note, expert opinion is not biological data, but it is often used in place of biological data or in combination with biological data, so it is included here. These data types were typically used alone, but in some cases they were used in combination in a two-stage approach, as discussed below.
Expert opinion
Expert opinion was used in 76 instances, 33 of these combined expert opinion with another biological data type (Table 3). We assumed the use of literature to inform expert opinion in most cases. Additionally, we classified papers as using expert opinion if researcher opinion was used in any part of the estimation procedure. For example, in instances where estimation procedures were used that were not able to take advantage of full optimization techniques due to computational limitations, the parameter space and/or a priori resistance surfaces were based in part on expert opinion.
The main issue with expert opinion data is that, even though experts may be drawing from their own previous research, the data are not truly empirical, making it difficult to objectively evaluate performance. Expert opinion has generally been shown to provide suboptimal parameterization of environmental variables when compared to empirical approaches (Pearce et al. 2001; Clevenger et al. 2002; Seoane et al. 2005), and thus has been criticized for its use in the development of resistance models (Cushman et al. in press). Moreover, because experts are often drawing from experience with habitat selection of their target species and not movement per se, these values should be considered proxies for movement at best. However, given the paucity of empirical data on many species in many places, more often than not expert opinion is the only option available on which to base a resistance model, and in many cases the urgency of conservation action requires that expert opinion be used as an interim solution until empirical data can be obtained (Compton et al. 2007).
Detection data
Detection data are defined by single point locations of unknown individuals. If multiple locations of the same individuals are recorded (e.g., via telemetry or capture–recapture), but the individual locations are treated as independent detections in the analysis, then the data are still considered detection data.
Detection data were used in 23 instances (Table 3) and included both presence-only data (n = 19) and presence–absence data (n = 4). The main difference between presence-only and presence–absence data is that the latter contains observations assumed to represent true absences while the former do not, and the methods of statistical analysis may differ. In the papers reviewed, detection data were obtained in a wide variety of ways, including: sightings (Bartelt et al. 2010), pellet counts (Beazley et al. 2005), nests (Kuroe et al. 2011), vocalizations (Laiolo and Tella 2006), traps (Wang et al. 2008), hair snares (Cushman et al. 2006; Wasserman et al. 2010), tracks or other sign (Epps et al. 2011), and telemetry studies (Chetkiewicz and Boyce 2009). Note, presence points collected via telemetry studies likely represent locations from fewer individuals than are collected through other methods, so the assumption that the samples represent a random sample of the entire population is often harder to justify (Manly et al. 2010). Moreover, care must also be taken to ensure independence of points from telemetry studies since they are intrinsically serially autocorrelated (Cushman 2010). For these reasons, data from telemetry studies are probably best treated as pathway data (as discussed below).
While detection data are often the most easily-acquired empirical data, there are a variety of issues associated with using detection data to parameterize resistance surfaces. Most importantly, detection data are point-specific, meaning that movement is inferred instead of directly measured. Also, there is no generally accepted method for translating habitat selection indices based on detections into resistance values for movement (Beier et al. 2008). Errors can arise from this inference because detections usually represent within-home range habitat use patterns and thus may not adequately reflect how environments affect animals during movements such as dispersal and migration (Cushman et al. in press), although in a recent study on cougar dispersal, it was shown that habitat preference of dispersers was similar to habitat preference of resident adults (Newby 2011). In addition, if detections are biased towards protected areas where individuals are disproportionately found, any measured habitat preferences may not be applicable to the matrix between them, especially if the range of environmental conditions differs in the matrix, as it is likely to do. This is particularly relevant if resistance to movement between protected areas is the focus of the conservation application (e.g., corridor design).
Relocation data
Though relocation data are sometimes associated with translocation of animals, we are defining relocation data as having two or more sequential locations of the same individual, but not at a sufficiently frequent interval to treat each sequence as a movement pathway. A commonly used example of relocation data is mark–recapture data. With relocation data, the focus is on the matrix between locations rather than the specific pathways between locations or the point locations themselves. Clearly, relocation data is preferred over static detection data when the focus is estimating resistance to movement of individuals through the landscape.
Relocation data were used in only eight instances (Table 3). The paucity of studies using relocation data reflects the greater difficulty of capturing, marking and re-capturing or re-sighting individuals compared to detecting species’ presence. Relocation data were used in two different ways. In the first approach, relocation data were used to compute movement speeds (Stevens et al. 2006), homing rates (Desrochers et al. 2011), movement rates (Ricketts 2001), exchange rates (Sutcliffe et al. 2003), or dispersal rates (Michels et al. 2001) through various environments or between habitat patches without knowing the actual movement paths. In most of these studies, inferred travel routes (e.g., least cost paths) between locations were used to calculate resistance values that best explained the observed movement rates. However, Stevens et al. (2006) used a controlled laboratory experiment to calculate movement speeds of individuals across various homogeneous substrates. Caution should be exercised when using movement speed alone to infer resistance, as it may not account for all three components of resistance: willingness to cross, physiological cost and reduction in survival. The main issue with relocation data used in this manner is that the movement paths between points are unknown and therefore must be inferred. Thus, there is an added unknown level of uncertainty in the final estimates of resistance associated with the method of inferring movement paths.
In the second approach, relocation data were used to construct home ranges (Graham 2001; Kautz et al. 2006; Thatcher et al. 2009). In these studies, travel paths between relocations within the delineated home ranges were not inferred at all; rather, the composition of the home ranges was compared to that available within the study area to assign habitat preferences, which were then transformed into resistance values. A major issue with home range data, like detection data, is that movement is inferred instead of directly measured, and there is added uncertainty due to variability in the method of home range determination. Additionally, home range estimation commonly results in including expanses of area that are not actually used by individuals, especially when using the Minimum Convex Polygon home range estimator (Worton 1995). However, the main issue with the methods used in all of these studies is that there was no formal evaluation of alternative resistance values; the final resistance values were merely assigned based on the computed habitat preferences.
Pathway data
Pathway data is defined by having two or more sequential locations of the same individuals, but at a sufficiently frequent interval to treat each sequence as a movement pathway (under the assumption that it represents the true pathway). Here, the focus is squarely on the specific connections between locations rather than the ambiguous matrix between locations or the point locations themselves. Pathway data is much preferred over static detection data and relocation data when the focus is estimating resistance to movement of individuals through the landscape.
Despite the clear advantages of pathway data, it was used in only two instances (Cushman and Lewis 2010; Richard and Armstrong 2010). The paucity of studies using pathway data reflects practical and economic tradeoffs associated with obtaining relocations at frequent intervals, but also may reflect unfamiliarity with the methods for analyzing movement paths by researchers.
To obtain meaningful movement pathways and thus meet the implicit assumption of both step and path analyses (see below), the interval between point locations must be relatively short to reduce the uncertainty associated with the interval between locations. Unfortunately, there is no consensus on how short is short enough, because it depends on the species’ vagility. For example, if a species has the ability to move 1 km in 1 h, and the spatial resolution of the environment is 100 m, then a fix interval of 1 h is probably far too long because there are too many possible pathways through the landscape that the species could take between two points say 500 m apart. However, a 10 min interval would likely capture the exact pathway at the resolution of 100 m. Because of this issue, pathway analyses are probably best suited to animals that can be monitored frequently, typically via GPS telemetry. Indeed, the advent of GPS telemetry has enabled the acquisition time interval between fixes to be dramatically reduced, enabling movement pathways to be generated for both short- and far-ranging species.
Using the entire pathway may confound different types of movement such as local movements within resource patches, movements between resource patches within home ranges, migration movements, and dispersal movements. This may translate to the final resistance surfaces if environmental variables confer different levels of resistance to different types of movement. Therefore, we recommend attempting to decouple these behaviors before the paths are used for estimating resistance to movement. While this issue is particularly evident with pathway data, it is an important issue in all resistance modeling studies regardless of the type of biological data used.
Genetic data
Movement need not refer to the movement of individuals directly; it can also refer to the movement of genes—by individuals over generations. Genetic data were used in 28 instances to derive resistance surfaces, plus an additional five instances to validate a resistance surface (Table 3). Genetic data consist of genetic samples collected at multiple locations and, in contrast to relocation and pathway data, genetic data does not require resampling individuals over time. Genetic data are used to measure the genetic distance between locations, either between individuals (Cushman et al. 2006) or between populations (Emaresi et al. 2011), and thus infer rates of gene flow, or to estimate gene flow directly (Wang et al. 2009). Genetic distance or estimates of gene flow are then evaluated against measures of geographic distance under alternative resistance models to find the best estimates of resistance. Of the 28 instances, 14 used a between-population measure of genetic distance, 12 used a between-individual measure, and two used a direct measure of gene flow between populations. Despite their prevalence, population-based methods have been criticized because individuals must be assigned to discrete populations even if the population is continuously distributed, and because they assume an island-matrix population structure that may be inappropriate for certain species or study areas (Shirk et al. 2010). Cushman and Landguth (2010) found that genetic distances between individuals provide the most robust estimates of resistance. However, population-based approaches may be the most practical means of analysis for some species and study areas (e.g., when populations are organized into discrete local populations). When migration rates among discrete local populations can be readily measured, a direct measure of gene flow, through siblingship and parentage assignments, may be the best approach (Wang et al. 2009).
In the past, the main issue with genetic data was the difficulty, inaccuracy and high cost of genotyping. However, in recent years these practical constraints have lessened dramatically, making genetic data a practical option in most cases. Consequently, the use of genetic data for parameterizing resistance surfaces appears to be on the rise (Spear et al. 2010). However, there are other issues with the use of genetic data. One issue is that estimates of gene flow may be temporally mismatched to the current landscape of interest (Landguth et al. 2010). Another is that resistance to movement of individuals (who are carrying genes across the landscape) is not measured directly, in contrast to relocation and pathway data. Estimates of gene flow between locations, whether inferred or not, reflect the movement of many individuals over many generations, presumably travelling along many different pathways. This makes genetic data appealing, since it effectively integrates the movements of many individuals over time and thus leads to a more synoptic measure of landscape resistance. Moreover, since gene flow reflects only successful movements, it integrates the movements that matter most to the species—those that result in successful breeding.
Analytical approaches
A wide variety of analytical approaches were used among the papers reviewed, which made any classification of approaches extremely challenging. Nevertheless, we found it useful to group papers into three categories: (1) ‘one-stage expert approach’, (2) ‘one-stage empirical approach’, and (3) ‘two-stage empirical approach’ (Fig. 1). Strictly speaking, the one-stage expert approach is not analytical, but it is in fact the most common approach used for deriving resistance surfaces, so it is included here.
One-stage expert approach
In the ‘one-stage expert approach’, expert opinion is used to derive the final resistance surface in a single step; no statistical modeling is used in the process. If biological data are used at all, it is used merely to inform expert opinion (Zimmermann and Breitenmoser 2007) or to validate the derived surface (Coulon et al. 2004).
A one-stage expert approach was used in 43 instances (Table 3). In these studies, experts were typically asked to provide numerical resistance values to each environmental layer from a bounded parameter space (e.g., 0–10 or 0–100) that would reflect resistance to movement during home range use, migration or dispersal. A final resistance surface was created by applying the resistance values to each environmental layer and summing the values. If weights were being used to reflect the relative importance of each environmental variable, these were incorporated via a weighted product (Singleton et al. 2002) or a weighted geometric mean (Beier et al. 2008). In some cases, experts were asked to derive a habitat suitability index from the environmental variables, and the inverse of the habitat suitability values were taken as the resistance values (LaRue and Nielsen 2008).
Because experts come from varying backgrounds and research experiences, they likely have diverging opinions regarding resistance or habitat suitability values (Johnson and Gillingham 2004). Consequently, various methods can be used to reduce the variation in expert opinion. For example, responses can be smoothed by simply averaging the submitted values or applying a trimmed mean by omitting the highest and lowest values (Compton et al. 2007). Variation can also be addressed through expert consensus, either by gathering the experts in one place or by using an iterative process where resistance values are re-compiled until a consensus is reached (Freeman and Bell 2011). A more structured method of dealing with variation in expert opinion is to use an analytical hierarchy process (AHP) (Saaty 1980), where the assigned values are standardized through the use of decision-making trees. An advantage of the AHP process is that it produces an index of consistency. If consistency scores are below 0.1, then the responses among experts are deemed consistent; whereas, if they are above 0.1, then re-assessment may take place to reduce variability (Magle et al. 2009). Because environmental variables may differ in the magnitude of their influence on species movement, experts can be asked to weight variables in terms of their influence (Beier et al. 2009), or the weighting can be completed in the AHP process. For example, Estrada-Peña (2003) applied time weights to the resistance surface by increasing weights as a function of distance to emulate tick feeding time on hosts. Experts can also be asked to identify landscape attributes that are barriers to movement or to estimate the cumulative resistance value that would result in a barrier to movement (Rabinowitz and Zeller 2010).
A one-stage expert approach is perhaps the least quantitatively rigorous of the approaches used, because there is no way to objectively parameterize resistance surfaces. However, a one-stage expert approach should not be too easily dismissed, as it allows experts to synthesize knowledge about complex habitat relationships obtained from disparate studies that may otherwise be difficult to incorporate into a resistance surface.
One-stage empirical approach
In a ‘one-stage empirical approach’, a statistical model is confronted with biological data to find the optimum resistance surface given the data; usually, some combination of expert opinion and previously published research is used to select environmental variables, their scale, and the functional form of the relationship between each variable and resistance (e.g., Gaussian, linear, power).
A one-stage empirical approach was used in 22 instances; however, in seven of these instances the biological data were not used to optimize the resistance surface (Table 3). Most of the analytical studies developed a RSF based on detection data and then used the inverse of the selection index to obtain resistance values, but there was a wide variety of statistical methods used to create the RSF, including logistic regression analysis (Pullinger and Johnson 2010), maximum entropy and ecological niche factor analysis (Wang et al. 2008; Kuemmerele et al. 2011), and a variety of other less conventional approaches (e.g., Ferreras 2001; Flamm et al. 2005; Kindall and VanManen 2007; Kuroe et al. 2011). In three instances, relocation data were used to construct home ranges, which were the basis for a simple RSF that assigned resistance values based on measured habitat preferences without optimizing the surface (Graham 2001; Kautz et al. 2006; Thatcher et al. 2009). In five instances, genetic data were used to derive the RSF; however, three of these cases used a strip-based approach (where proportion of environmental features within a rectangular strip between populations were used) to estimate resistance values and no optimization was performed (Emaresi et al. 2011). Two studies developed RSFs based on genetic data and attempted to optimize resistance values in a single stage (Wang et al. 2009; Shirk et al. 2010).
These latter two studies are unique in their attempts to use landscape genetic techniques to sample the full parameter space. While the optimization of resistance based on detection data is relatively straightforward and computationally efficient using conventional statistical methods, this is not the case with movement data such as relocation data, pathway data, and genetic data. Because of the exponentially large number of possible resistance surfaces in multivariate analyses, and the computational demands of analyzing movement paths (either inferred or observed), a full optimization of all environmental parameters has not yet been achieved. However, Wang et al. (2009) and Shirk et al. (2010) have used two different landscape genetics techniques to successfully perform a constrained optimization. Wang et al. (2009) created a range of a priori resistance surfaces using three environmental variables. One parameter was always assigned a blanket resistance value of 1 (since resistance values are relative) and the other two layers were assigned every possible combination of resistance values from 1 to 10 in 0.1 unit increments. The relative least-cost distances between population pairs were compared with the 95 % confidence interval of relative rates of gene flow estimated from the molecular data. All resistance surfaces whose relative least-cost distances between all population pairs fell within their expected ranges, based on the molecular analysis, were considered to be biologically accurate. Shirk et al. (2010) developed a framework that allows for interactions among variables and non-linear responses using a quasi-unconstrained parameter space. First, they performed a univariate optimization of each of four environmental variables by systematically increasing and decreasing the resistance values until a unimodal peak of support (using genetic data) was reached. Then, they obtained a multivariate model by summing all the optimized univariate surfaces and systematically optimizing the parameters for one variable while holding the other layers constant, and iteratively repeating this process until the parameter estimates stabilized.
Two-stage empirical approach
In a ‘two-stage empirical approach’, expert opinion and/or biological data are used to derive a suite of alternative resistance surfaces in the first stage, which are confronted with biological data and a model selection procedure in the second stage to select the best resistance surface. Note, given the ubiquitous involvement of experts in all approaches, such as selecting environmental variables and choosing the functional form of the relationship between each variable and resistance, the distinction between this approach and the one-stage empirical approach is perhaps a matter of degree and not an absolute dichotomy.
A two-stage empirical approach was used in 36 instances, 33 of which used expert opinion in stage one to derive the alternative resistance surfaces (Table 3). In the majority of these studies (n = 28), expert opinion was used to derive a limited, often small, set of alternative resistance surfaces (i.e., candidate models) based on specific hypothesized relationships between the environment and resistance to movement—in the spirit of model selection and multi-model approaches to statistical inference (Burnham and Anderson 2002). This approach was combined with detection data (Chardon et al. 2003), relocation data (Desrochers et al. 2011), pathway data (Richard and Armstrong 2010) and genetic data (Koscinsky et al. 2009) in the second stage to select the best surface. In the remaining studies (n = 8), expert opinion was used to constrain the resistance parameter space, from which a priori resistance surfaces were constructed in sufficient number and distribution to effectively sample that parameter space. Here, expert opinion was used mainly to determine the range of plausible resistance values for each environmental variable; the candidate models or resistance surfaces were derived merely as a practical solution to model optimization within the constrained parameter space. This approach was combined with detection data (Janin et al. 2009), relocation data (Sutcliffe et al. 2003), pathway data (Cushman and Lewis 2010) and genetic data (Cushman et al. 2006) in the second stage to select the best surface. Finally, it should be noted that in both cases, expert opinion is used to select the environmental variables and the functional form of the relationship between each variable and resistance; thus, both are clearly expert-guided approaches.
Surprisingly, only three papers used empirical data to develop a suite of resistance surfaces which were then subjected to model selection through the use of an independent empirical data set of a different data type (Table 3).
Resource selection functions
In the context of resistance surface modeling, we consider a RSF to be any model that yields estimates of environmental resistance or habitat selection based on patterns observed in biological data (Fig. 2).

Resource Selection Functions used to derive resistance surfaces
Point selection function (PSF)
A PSF seeks to find the combination of environmental parameters that best explains the distribution of detections based on presence-only or presence–absence points. Importantly, it is the characteristics of the point locations themselves and not the connections between points that are assessed in a PSF. Resistance is typically given as the inverse of the final selection index.
A PSF was used in 16 instances (Table 3). In most of these cases (n = 12), the PSF was derived from detection data and optimized using an objective statistical procedure such as logistic regression (Chetkiewicz and Boyce 2009). However, in a few of these cases, alternative parameterizations of the PSF were derived by experts a priori and the detection data were used simply to select the parameters with the most biological support (Janin et al. 2009).
An important issue with any PSF derived from presence-only points is determining what constitutes the “available” environment. Regarding this, there appears to be no accepted standard, but methods such as paired logistic regression (also referred to as ‘conditional logistic regression’ and ‘case-controlled logistic regression’) that compare each presence point to what is locally available within a meaningful ecological neighborhood seem to us to be superior to other methods (Pullinger and Johnson 2010). Of course, a PSF derived from presence–absence points does not suffer this issue and seems to us to be superior than one derived from presence-only data. The main issue with any PSF is the need to infer resistance to movement from resource selection at point locations.
Home range selection function (HSF)
A HSF seeks to find the combination of environmental variables that best explains the distribution of home ranges derived from relocation data. Importantly, it is the characteristics of the home ranges and not the specific connections between relocations that are assessed in a HSF. Resistance is typically given as the inverse of the final selection index.
A HSF was used in only three instances (Table 3). None of these cases involved optimizing the HSF based on the home range data; in two of these cases they compared the composition of the home ranges to that of the study area in order to assign a habitat preference index to each environmental condition and then assigned resistance as the inverse of the preference index (Graham 2001; Kautz et al. 2006).
The issues with a PSF also apply to a HSF. However, at least conceptually, a HSF is closer to the ideal of addressing resistance to movement than a PSF because a home range includes the area an individual moves through to meet their local resource needs. Despite this conceptual advantage, however, a HSF does not overcome the fundamental limitation of having to infer resistance to movement from point data.
Matrix selection function (MSF)
A MSF seeks to find the combination of resistance parameters that best explains the movement of individuals or their genes between locations, but without knowing or assuming the actual movement paths between locations. Specifically, a MSF derives from a measure of the ecological distance between two points separated by a resistant matrix, where the ecological distance increases as the geographic distance and resistance between points increases. A MSF seeks to find the resistance parameters that maximizes the correlation between the ecological distance and the frequency of movement of individuals or their genes between locations.
A MSF was used in 38 instances, making it by far the most commonly used RSF (Table 3). In most of these cases (n = 28), alternative parameterizations of the MSF were derived by experts a priori and either detection data (n = 6), relocation data (n = 2) or genetic data (n = 20) were used to select the parameters with the most biological support. The cases involving detection data seem contrary to the idea of a MSF; however, in these cases the MSF was used in the context of a metapopulation model to explain observed patch occupancy (or presence). In only three cases was the MSF optimized (within constraints) in a one-stage empirical approach using an objective statistical procedure based on either relocation data (n = 1) or genetic data (n = 2).
A MSF has several important features. First, a MSF evaluates environmental resistance directly, as opposed to a PSF that evaluates habitat selection directly and produces an index that must be translated into resistance post hoc. Second, a MSF evaluates the environmental resistance between locations without requiring information on the actual movement paths, which are required by both step and PathSFs (see below). Third, a MSF does not require the arbitrary designation of ‘available’, which is a challenge that confronts all other selection functions. Lastly, A MSF is the only selection function suited to multiple types of biological data, including detection data, relocation data and genetic data.
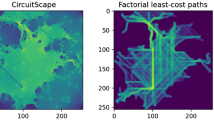
The main issue with any MSF is choosing a measure of ecological distance, and there are several, including: (1) least cost distance, which is equal to the cumulative cost along the least cost path between points (Epps et al. 2007); (2) least cost path length, which is equal to the geographic distance along the least cost path between points (Koscinsky et al. 2009); (3) least cost corridor, which is equal to the cumulative cost within the least cost corridor between points (Savage et al. 2010); (4) resistance distance, which is equal to the cumulative resistance of the matrix between points based on circuit theory (McRae 2006; Klug et al. 2011); and (5) resistant kernel distance, which is equal to the kernel-weighted (e.g., Gaussian) least cost distance between points (Compton et al. 2007). Currently, there is no one preferred measure of ecological distance. McRae and Beier (2007) compared how least cost distance and resistance distance performed and found resistance distance to be better, while Schwartz et al. (2009) found the opposite. Savage et al. (2010) found the least cost corridor measure to outperform least cost distance. Foltête et al. (2008) did not find any difference between the least cost distance and least cost path length. In the studies reviewed, there were 23 instances of least cost distance, eight of least cost path length, one of least cost corridor, and four of resistance distance. Many studies used more than one measure of ecological distance. Regardless of the measure of ecological distance chosen, care must be taken to address the inherently high level of correlation with straight geographic distance (Cushman and Landguth 2010). Another issue with the MSF approach, as stated above, is that they are very computationally demanding which has, to date, prevented a full optimization of resistance estimates.
Step selection function (SSF)
A SSF seeks to find the combination of resistance parameters that best explains the movement of individuals between locations, and is derived from pathway data where specific movement paths can be meaningfully assigned and decomposed into discrete segments or steps between sequential locations. A SSF derives from a measure of the cost distance along each segment compared to the cost distance along random segments of equal length. Note, here the cost distance is measured along each segment of the observed pathway rather than along an arbitrary modeled path as in a MSF.
A SSF was used in only one instance, making it one of the two least commonly used types of RSF (Table 3). In this case, alternative resistance surfaces were derived by experts a priori and the pathway data were used to select the surface that best discriminated between observed and random segments (Richard and Armstrong 2010).
A SSF is one of the most powerful selection functions for deriving resistance surfaces, because it derives directly from observed movement pathways. As with any selection function that compares use to availability, one of the main issues with any SSF is choosing the spatial (and temporal) constraints on availability. For example, should the beginning point of each random segment be the same as the paired observed segment or should it be shifted by a random distance and direction and, if so, how far? The implications of these decisions on the final parameter estimates are unknown. Another issue arises when available steps are chosen close to the observed step, making the available steps highly correlated and representative of only habitat near the observed step. This runs the risk of omitting from the analysis important landscape characteristics that an individual is actually avoiding, making the analysis result in a gradient of resistance for preferred habitat types.
Path selection function (PathSF)
A PathSF is similar to a SSF except that the entire movement path is assessed as a single pathway as opposed to a series of steps. A PathSF was also used in only one instance (Table 3). In this case, alternative resistance surfaces were derived by experts a priori and the pathway data were used to select the surface that best discriminated between observed and random paths (Cushman and Lewis 2010).
A PathSF is arguably the most powerful selection function for deriving resistance surfaces, because inferences are made directly from observed movement pathways. One advantage of using the entire path as the observational unit rather than the individual segments is that fine-scale habitat selection can be captured and pseudoreplication and autocorrelation issues can be avoided by preserving the topology of the entire path (Cushman 2010). Another advantage is that a PathSF allows inferences to be made about environmental features between observed points. Despite these advantages, however, a PathSF cannot escape the issue of arbitrariness in the designation of ‘available’. In Cushman and Lewis (2010), studying black bears (Ursus americanus) in northern Idaho, available paths were randomly shifted a distance between 0 and 20 km (based on a black bear’s average dispersal distance) in latitude and longitude, and randomly rotated between 0° and 360°. An alternative to the approach used by Cushman and Lewis (2010) is to simulate individual movement paths by drawing from empirical distributions of number of steps, step length, step orientation and total path length (B. Compton and K. McGarigal, unpublished report). This approach is a trade-off between preserving the exact topology of the observed paths and representing the underlying ‘population’ from which the observed paths were drawn, but an empirical comparison of these two approaches has not been done.
Conclusions and recommendations
In this review, we assessed current practices for deriving resistance surfaces and have arrived at several conclusions in three overarching categories: (1) selection and definition of environmental variables, (2) use of biological data and analytical processes, and (3) evaluation of resistance surfaces. First, not surprisingly, there was tremendous variety of environmental variables used across studies owing to differences in the species and ecological systems under investigation (Table 2). In some cases, researchers used model selection procedures to select the number and combination of variables used to derive the resistance surface that best explained observed biological data. However, in most cases, little or no attention was paid to the sensitivity of the results to the choice and/or number of environmental variables used to construct the resistance surface. In addition, we discovered very few studies that evaluated choices for representing each environmental variable in terms of the measurement scale (continuous or categorical) and spatial resolution (i.e., grain size). For example, of the 22 papers that used elevation, none compared the representation of elevation as a continuous surface (or a continuous function of elevation) versus discrete elevation classes. Likewise, while there is no inherently correct spatial resolution for representing an environmental attribute, since it varies among species and ecological processes and is usually unknown to the researcher prior to the analysis, our review identified only a handful of studies that evaluated how spatial resolution affected the optimization of the resistance surface (McRae and Beier 2007; Rae et al. 2007; Broquet et al. 2009; Koscinsky et al. 2009; Murphy et al. 2010; Nichol et al. 2010). Indeed, this may not be as important as choice of thematic representation of environmental variables since the grain size may have little effect on the relative cumulative cost of a corridor (Cushman and Landguth 2010). However, given the almost unlimited number of ways to represent the environment in terms of the number and choice of variables and the spatial and thematic scale, there is a need for more comparative studies to determine sensitivity of results to these choices and to recommend robust methods for finding the optimal representation given that it cannot be known a priori.
Second, the papers reviewed used a wide variety of data types and analytical methods to reach the same goal—estimating resistance to movement (Table 3). Despite heavy criticism, expert opinion was used in 80 % of the papers reviewed and was the only source of information in 43 % of the papers. Reliance on expert opinion is likely to continue in the future as there are many species and/or systems for which empirical data do not yet exist and yet conservation concerns demand immediate action. Genetic data were the second most heavily used data type (38 % of papers) and its use appears to be increasing due to the increased ease, accuracy, and affordability of genotyping. The increasing appeal of genetic data may also be that it provides a measure of functionally relevant movement between populations or sites—movement that results in successful breeding. Detection data (consisting of both presence-only and presence–absence data) was the third most common data type (23 % of papers), despite the fact that resistance to movement must be inferred from detection data. Due to the prevalence of detection data in wildlife studies, it is likely that methods based on detection data will continue to figure prominently in resistance modeling in the foreseeable future. Since estimating resistance to movement was a putative goal of the studies reviewed, we found it alarming that movement data in the form of relocations (8 % of papers) or pathways (2 % of papers) was the least used data type. The paucity of individual movement data in such studies is likely due to the practical, logistical and/or economic difficulties of collecting movement data. However, with the increased availability of GPS telemetry, it is likely that the use of movement data will increase in the future.
Despite the dramatic differences among data types, there have been few attempts to critically and objectively evaluate these differences. Clevenger et al. (2002) found that empirical data generally outperformed expert opinion, Shirk et al. (2010) found that their optimized resistance model was superior to the expert-based model and Cushman and Lewis (2010) found that that using genetic distances between individuals resulted in a similar resistance surface to one developed using movement paths. Clearly, there is an urgent need for more comprehensive comparative studies that seek to clarify the tradeoffs associated with each data type.
Third, not surprisingly, given the variety of types of biological data used, a variety of RSFs were used to estimate resistance values. Indeed, one of the most challenging aspects of this review was trying to understand and organize the myriad analytical approaches used by researchers to derive the final resistance surface. We offer an organizational scheme that distinguishes among five basic types of RSFs, and we encourage future researchers to adopt this scheme. Each selection function corresponds to a different analytical framework for estimating the final resistance values, and each has inherent issues (discussed previously) that should be considered in every application. Two of these issues are particularly noteworthy. First, all of the selection functions except the MSF require the researcher to designate what constitutes ‘available’ for comparison with the ‘use’ data. This adds a degree of arbitrariness to the analysis that to our knowledge has not been addressed in the context of resistance surface modeling, but needs to be. Second, while PSFs derived from detection data have been over-utilized in resistance surface modeling, in our opinion, PathSFs derived from pathway data have been under-utilized. Pathway data are the only data type that provide unambiguous spatial representation of how animals move through the environment to meet their local resource needs and they may be constructed to assess within home range movements, dispersal or migration depending on the source data. MSFs derived from genetic data are complementary to PathSFs because they can assess multi-generational movement of effective dispersers (i.e., those that disperse and reproduce), albeit at the cost of having to infer resistance to movement through a matrix based on a chosen measure of ecological distance.
A pervasive issue in resistance surface modeling studies is that these methods rely on the assumption that animals make movement decisions based on the same preferences they use in selecting habitat. This may not be an issue if this assumption is true. However, if animals are driven by something other than resource selection during movement events, the two behaviors need to be separated when estimating resistance values. This issue is perhaps most apparent with pathway data. Because the use of local resources (e.g., food and cover) and movement through the environment to find and obtain those local resources are typically difficult to discern in pathway data, it is challenging to parse out environmental conditions associated with local resource use from those conferring resistance to movement. Moreover, the movement data may confound local movements within resource patches, movements between resource patches within home ranges, migration movements between seasonal use areas, and dispersal movements between natal and breeding sites or among breeding sites. There is no reason to assume that the environment will affect resource use and different types of movement the same. While this issue is most notable with pathway data, it also applies to other data types, with the possible exception of genetic data which generally deals principally with movement associated with successful reproduction. We are not aware of any attempts to address this issue in resistance modeling studies and recommend that it be a priority in future studies.
Given the myriad sources of uncertainty in the modeling process and the propagation of errors from imperfect environmental data to the collection and analysis of the biological data, model sensitivity and uncertainty should be assessed in any study that uses resistance surfaces, especially when expert opinion is involved (Rae et al. 2007; Beier et al. 2009). Less than a third of the papers reviewed performed sensitivity analyses, either on corridor location resulting from the analysis (Rayfield et al. 2010) or on statistical differences between the resistance surfaces themselves (Compton et al. 2007). The incorporation of uncertainty into resistance models was much less common, with only a few papers creating models based on the probability distribution of parameter estimates (Kuroe et al. 2011). Performing sensitivity analyses or incorporating uncertainty in parameter estimates are especially important for research that will result in conservation recommendations or conservation action. Presumably, much of the research that seeks to estimate resistance will use the resultant resistance surfaces in connectivity modeling and these connections or corridors will be promoted to planners and land managers for implementation. Presenting the full range of possibilities for proposed actions adds transparency to the process and increases the likelihood of buy-in from land managers and the public alike.
Applying the resistance estimates in connectivity modeling was not the focus of this review, but it is worth mentioning that the use of these resistance estimates to identify corridors may have far-reaching consequences. Conservation and public resources may be used to implement wildlife corridors based upon resistance surfaces. To this end, we recommend more comparative research into each step of the resistance estimation process—the selection and definition of environmental variables, the choice of biological data type, and the analytical process. This will help to assess the relative influence of each step in the process and its influence on the accuracy of resistance estimates. Ultimately, comparative analyses will lead to filling in gaps in our knowledge around resistance surface modeling and lead to more effective and successful conservation measures.
References
Adriaensen F, Chardon JP, De Blust G, Swinnen E, Villalba S, Gulinck H, Matthysen E (2003) The application of ‘least-cost’ modeling as a functional landscape model. Landsc Urban Plan 64:233–247
Bartelt PE, Klaver RW, Porter WP (2010) Modeling amphibian energetics, habitat suitability, and movements of western toads, Anaxyrus (= Bufo) boreas, across present and future landscapes. Ecol Model 221:2675–2686
Beazley K, Smandych L, Snaith T, MacKinnon F, Austen-Smith P Jr, Dunker P (2005) Biodiversity considerations in conservation system planning: map-based approach for Nova Scotia, Canada. Ecol Appl 15:2192–2208
Beier P, Majka DR, Spencer WD (2008) Forks in the road: choices in procedures for designing wildland linkages. Conserv Biol 22:836–851
Beier P, Majka DR, Newell SL (2009) Uncertainty analysis of least-cost modeling for designing wildlife linkages. Ecol Appl 19:2067–2077
Braunisch V, Segelbacher G, Hirzel AH (2010) Modelling functional landscape connectivity from genetic population structure: a new spatially explicit approach. Mol Ecol 19:3664–3678
Broquet T, Ray N, Petit E, Fryxell JM, Burel F (2009) Genetic isolation by distance and landscape connectivity in the American marten (Martes americana). Landscape Ecol 21:877–889
Burnham KP, Anderson D (2002) Model selection and multi-model inference (2nd edn). Springer, New York
Chardon JP, Adriaensen F, Matthysen E (2003) Incorporating landscape elements into a connectivity measure: a case study for the Speckled wood butterfly (Pararge aegeria L.). Landscape Ecol 18:561–573
Chetkiewicz C-LB, Boyce MS (2009) Use of resource selection functions to identify conservation corridors. J Appl Ecol 46:1036–1047
Clark RW, Brown WS, Stechert R, Zamudio KR (2008) Integrating individual behavior and landscape genetics: the population structure of timber rattlesnake hibernacula. Mol Ecol 17:719–730
Clevenger AP, Wierzchowski J, Chruszcz B, Gunson K (2002) GIS-generated, expert-based models for identifying wildlife habitat linkages and planning mitigation passages. Conserv Biol 16:503–514
Compton BW, McGarigal K, Cushman SA, Gamble LR (2007) A resistant-kernel model of connectivity for amphibians that breed in vernal pools. Conserv Biol 21:788–799
Coulon A, Cosson JF, Angibault JM, Cargnelutti B, Galan M, Morellet N, Petit E, Aulagnier S, Hewison AJM (2004) Landscape connectivity influences gene flow in a roe deer population inhabiting a fragmented landscape: an individual-based approach. Mol Ecol 13:2841–2850
Cushman SA (2010) Animal movement data: GPS telemetry, autocorrelation and the need for path-level analysis. In: Cushman SA, Huettmann F (eds) Spatial complexity, informatics, and wildlife conservation. Springer, New York, pp 131–149
Cushman SA, Landguth EL (2010) Spurious correlations and inference in landscape genetics. Mol Ecol 19:3592–3602
Cushman SA, Lewis JS (2010) Movement behavior explains genetic differentiation in American black bears. Landscape Ecol 25:1613–1625
Cushman SA, McKelvey KS, Hayden J, Schwartz MK (2006) Gene-flow in complex landscapes: testing multiple hypotheses with causal modeling. Am Nat 168:486–499
Cushman SA, Gutzweiler K, Evans JS, McGarigal K (2010) The gradient paradigm: a conceptual and analytical framework for landscape ecology. In: Cushman SA, Huettmann F (eds) Spatial complexity, informatics, and wildlife conservation. Springer, New York, pp 83–108
Cushman S, McRae B, Adriaensen F, Beier P, Shirley M, Zeller KA (in press) Biological corridors. In: MacDonald D, Willis K (eds) Key topics in conservation biology, vol II. Wiley
Desrochers A, Bélisle M, Morand-Ferron J (2011) Integrating GIS and homing experiments to study avian movement costs. Landscape Ecol 26:47–58
Emaresi G, Pellet J, Dubey S, Hirzel AH, Fumagalli L (2011) Landscape genetics of the Alpine newt (Mesotriton alpestris) inferred from a strip-based approach. Conserv Genet 12:41–50
Epps CW, Wehausen JD, Bleich VC, Torres SG, Brashares JS (2007) Optimizing dispersal and corridor models using landscape genetics. J Appl Ecol 44:714–724
Epps CW, Mutayoba BM, Gwin L, Brashares JS (2011) An empirical evaluation of the African elephant as a focal species for connectivity planning in East Africa. Divers Distrib 17:603–612
Estrada-Peña A (2003) The relationships between habitat topology, critical scales of connectivity and tick abundance Ixodes ricinus in a heterogeneous landscape in northern Spain. Ecography 26:661–671
Ferreras P (2001) Landscape structure and asymmetrical inter-patch connectivity in a metapopulation of the endangered Iberian lynx. Biol Conserv 100:125–136
Flamm RO, Weigle BL, Wright IE, Ross M, Aglietti S (2005) Estimation of manatee (Trichechus manatus latirostris) places and movement corridors using telemetry data. Ecol Appl 15:1415–1426
Foltête JC, Berthier K, Cosson JF (2008) Cost distance defined by a topological function of landscape. Ecol Model 210:104–114
Foody GM (2002) Status of land cover classification accuracy assessment. Remote Sens Environ 80:185–201
Freeman RC, Bell KP (2011) Conservation versus cluster subdivisions and implications for habitat connectivity. Landsc Urban Plan 101:30–42
Graham CH (2001) Factors influencing movement patterns of keel-billed toucans in a fragmented tropical landscape in southern Mexico. Conserv Biol 15:1789–1798
ISI Web of Knowledge Thomson Reuters (2011) Web of Science. Retrieved June 16, 2011 from http://pcs.isiknowledge.com
Janin A, Léna JP, Ray N, Delacourt C, Allemand P, Joly P (2009) Assessing landscape connectivity with calibrated cost-distance modelling: predicting common toad distribution in a context of spreading agriculture. J Appl Ecol 46:833–841
Jaquiéry J, Broquet T, Hirzel AH, Yearsley J, Perrin N (2011) Inferring landscape effects on dispersal from genetic distances: how far can we go? Mol Ecol 20:692–705
Johnson CJ, Gillingham MP (2004) Mapping uncertainty: sensitivity of wildlife habitat ratings to expert opinion. J Appl Ecol 41:1032–1041
Kautz R, Kawula R, Hoctor T, Comiskey J, Jansen D, Jennings D, Kasbohm J, Mazzzotti F, McBride R, Richardson L, Root K (2006) How much is enough? Landscape-scale conservation for the Florida panther. Biol Conserv 130:118–133
Kindall JL, VanManen FT (2007) Identifying habitat linkages for American black bears in North Carolina, USA. J Wildl Manag 71:487–495
Klug PE, Wisely SM, With KA (2011) Population genetic structure and landscape connectivity of the Eastern Yellowbelly Racer (Coluber constrictor flaviventris) in the contiguous tallgrass prairie of northeastern Kansas, USA. Landscape Ecol 26:281–294
Koen EL, Garroway CJ, Wilson PJ, Bowman J (2010) The effect of map boundary on estimates of landscape resistance to animal movement. PLoS ONE 5:1–8
Koscinsky D, Yates AG, Handford P, Lougheed SC (2009) Effects of landscape and history on diversification of a montane, stream-breeding amphibian. J Biogeogr 36:255–265
Kuemmerle T, Perzanowski K, Resit Akcakaya H, Beaudry F, Van Deelen TR, Parnikoza I, Khoyetskyy P, Waller DM, Radeloff VC (2011) Cost-effectiveness of strategies to establish a European bison metapopulation in the Carpathians. J Appl Ecol 48:317–329
Kuroe M, Yamaguchi N, Kadoya T, Miyashita T (2011) Matrix heterogeneity affects population size of the harvest mice: Bayesian estimation of matrix resistance and model validation. Oikos 120:271–279
Laiolo P, Tella JL (2006) Landscape bioacoustics allow detection of the effects of habitat patchiness on population structure. Ecology 87:1203–1214
Landguth EL, Cushman SA, Schwartz MK, McKelvey KS, Murphy M, Luikart G (2010) Quantifying the lag time to detect barriers in landscape genetics. Mol Ecol 19:4179–4191
LaRue MA, Nielsen CK (2008) Modelling potential dispersal corridors for cougars in Midwestern North America using least-cost path methods. Ecol Model 212:372–381
Loveland TR, Reed BC, Brown JF, Ohlen DO, Zhu Z, Yang L, Merchant JW (2000) Development of a global land cover characteristics database and IGBP DISCover from 1 km AVHRR data. Int J Remote Sens 21:1303–1330
Magle SB, Theobald DM, Crooks KR (2009) A comparison of metrics predicting landscape connectivity for a highly interactive species along an urban gradient in Colorado, USA. Landscape Ecol 24:267–280
Manel S, Schwartz MK, Luikart G, Taberlet P (2003) Landscape genetics: combining landscape ecology and population genetics. Trends Ecol Evol 18:189–197
Manly BFJ, McDonald LL, Thomas DL, McDonald TL, Erickson WP (2010) Resource selection by animals: statistical design and analysis for field studies, 2nd edn. Kluwer, Amsterdam
McGarigal K, Cushman SA (2005) The gradient concept of landscape structure. In: Wiens J, Moss M (eds) Issues and perspectives in landscape ecology. Cambridge University Press, Cambridge, pp 112–119
McRae BH (2006) Isolation by resistance. Evolution 60:1551–1561
McRae BH, Beier P (2007) Circuit theory predicts gene flow in plant and animal populations. Proc Nat Acad Sci 104:19885–19890
Michels E, Cottenie K, Neys L, DeGelas K, Coppin P, DeMeester L (2001) Geographical and genetic distances among zooplankton populations in a set of interconnected ponds: a plea for using GIS modelling of the effective geographical distance. Mol Ecol 10:1929–1938
Murphy MA, Dezzani R, Pilliod DS, Storfer A (2010) Landscape genetics of high mountain frog metapopulations. Mol Ecol 19:3634–3649
Newby JR (2011) Puma dispersal ecology in the central Rocky Mountains. Master’s thesis, University of Montana, Missoula, MT, pp 1–111
Nichol JE, Wong MS, Corlett R, Nichol DW (2010) Assessing avian habitat fragmentation in urban areas of Hong Kong (Kowloon) at high spatial resolution using spectral unmixing. Landsc Urban Plan 95:54–60
O’Brien D, Manseau M, Fall A, Fortin MJ (2006) Testing the importance of spatial configuration of winter habitat for woodland caribou: an application of graph theory. Biol Conserv 130:70–83
Pearce JL, Cherry K, Drielsma M, Ferrier S, Whish G (2001) Incorporating expert opinion and fine-scale vegetation mapping into statistical models of faunal distribution. J Appl Ecol 38:412–424
Pinto N, Keitt TH (2009) Beyond the least-cost path: evaluating corridor redundancy using a graph-theoretic approach. Landscape Ecol 24:253–266
Pullinger MG, Johnson CJ (2010) Maintaining or restoring connectivity of modified landscapes: evaluating the least-cost path model with multiple sources of ecological information. Landscape Ecol 25:1547–1560
Rabinowitz A, Zeller KA (2010) A range-wide model of landscape connectivity and conservation for the jaguar, Panthera onca. Biol Conserv 143:939–945
Rae C, Rothley K, Dragicevic S (2007) Implications of error and uncertainty for an environmental planning scenario: a sensitivity analysis of GIS-based variables in reserve design. Landsc Urban Plan 79:210–217
Rayfield B, Fortin MJ, Fall A (2010) The sensitivity of least-cost habitat graphs to relative cost surface values. Landscape Ecol 25:519–532
Richard Y, Armstrong DP (2010) Cost distance modelling of landscape connectivity and gap-crossing ability using radio-tracking data. J Appl Ecol 47:603–610
Ricketts TH (2001) The matrix matters: effective isolation in fragmented landscapes. Am Nat 158:87–99
Saaty TL (1980) The analytic hierarchy process. McGraw-Hill, New York
Savage WK, Fremier AK, Shaffer HB (2010) Landscape genetics of alpine Sierra Nevada salamanders reveal extreme population subdivision in space and time. Mol Ecol 19:3301–3314
Sawyer SC, Epps CW, Brashares JS (2011) Placing linkages among fragmented habitats: do least-cost models reflect how animals use landscapes? J Appl Ecol 48:668–678
Schwartz MK, Copeland JP, Anderson NJ, Squires JR, Inman RM, McKelvey KS, Pilgrim KL, Waits LP, Cushman SA (2009) Wolverine gene flow across a narrow climatic niche. Ecology 90:3222–3232
Seoane J, Bustamente J, Diaz-Delgado R (2005) Effect of expert opinion on the predictive ability of environmental models of bird distribution. Conserv Biol 19:512–522
Shirk AJ, Wallin DO, Cushman SA, Rica CG, Warheit KI (2010) Inferring landscape effects on gene flow: a new model selection framework. Mol Ecol 19:3603–3619
Short Bull RA, Cushman SA, Mace R, Chilton T, Kendall KC, Landguth EL, Schwartz MK, McKelvey K, Allendorf FW, Luikart G (2011) Why replication is so important in landscape genetics: American black bear in the Rocky Mountains. Mol Ecol 20:1092–1107
Singleton PH, Gaines WL, Lehmkuhl JF (2002) Landscape permeability for large carnivores in Washington: a geographic information system weighted-distance and least-cost corridor assessment. Research Paper PNW-RP-549. U.S. Forest Service Pacific Northwest Research Station, Portland, OR
Spear SF, Balkenhol N, Fortin MJ, McRae BH, Scribner K (2010) Use of resistance surfaces for landscape genetic studies: considerations for parameterization and analysis. Mol Ecol 19:3576–3591
Stevens VM, Verkenne C, Vandewoestijne S, Wesselingh RA, Baguette M (2006) Gene flow and functional connectivity in the natterjack toad. Mol Ecol 15:2333–2344
Sutcliffe OL, Bakkestuen V, Fry G, Stabbetorp OE (2003) Modelling the benefits of farmland restoration: methodology and application to butterfly movement. Landsc Urban Plan 63:15–31
Thatcher CA, VanManen FT, Clark JD (2009) A habitat assessment for Florida panther population expansion into central Florida. J Mammal 90:918–925
Thompson CM, McGarigal K (2002) The influence of research scale on bald eagle habitat selection along the lower Hudson River, New York. Landscape Ecol 17:569–586
Vignieri SN (2005) Streams over mountains: influence of riparian connectivity on gene flow in the Pacific jumping mouse (Zapus trinotatus). Mol Ecol 14:1925–1937
Wang YH, Yang KC, Bridgman CL, Lin LK (2008) Habitat suitability modelling to correlate gene flow with landscape connectivity. Landscape Ecol 23:989–1000
Wang IJ, Savage WK, Shaffer B (2009) Landscape genetics and least-cost path analysis reveal unexpected dispersal routes in the California tiger salamander (Ambystoma californiense). Mol Ecol 18:1365–1374
Wasserman TN, Cushman SA, Schwartz MK, Wallin DO (2010) Spatial scaling and multi-model inference in landscape genetics: Martes Americana in northern Idaho. Landscape Ecol 25:1601–1612
Watts K, Eycott AE, Handley P, Ray D, Humphrey JW, Quine CP (2010) Targeting and evaluating biodiversity conservation action within fragmented landscapes: an approach based on generic focal species and least-cost networks. Landscape Ecol 25:1305–1318
Wiens JA (1989) Spatial scaling in ecology. Funct Ecol 3:385–397
Worton BJ (1995) A convex hull-based estimator of home-range size. Biometrics 51:1206–1215
Zimmermann F, Breitenmoser U (2007) Potential distribution and population size of the Eurasian lynx Lynx lynx in the Jura Mountains and possible corridors to adjacent ranges. Wildl Biol 13:406–416
Acknowledgments
We thank Brad Timm, Sandy Haire, Sam Cushman, Paul Beier and Erin Landguth for comments on a draft of this manuscript. This material is based on work partially supported by a Kaplan Graduate Award and a UMASS Graduate School Fellowship.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article
Cite this article
Zeller, K.A., McGarigal, K. & Whiteley, A.R. Estimating landscape resistance to movement: a review. Landscape Ecol 27, 777–797 (2012). https://doi.org/10.1007/s10980-012-9737-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10980-012-9737-0