
Abstract
This work is concerned with the study of two-level penalty finite element method for the 2D/3D stationary incompressible magnetohydrodynamics equations. The new method is an interesting combination of the Newton iteration and two-level penalty finite element algorithm with two different finite element pairs \(P_{1}b\)-\(P_{1}\)-\(P_{1}b\) and \(P_{1}\)-\(P_{0}\)-\(P_{1}\). Moreover, the rigorous analysis of stability and error estimate for the proposed method are given. Numerical results verify the theoretical results and show the applicability and effectiveness of the presented scheme.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
MHD mainly studies the dynamics of electrically conducting fluids and these MHD flows are governed by the Navier–Stokes equations and coupled with the pre-Maxwell equations. In addition, MHD is of great importance in many problems of engineering. The design of cooling systems with liquid metals for a nuclear reactor, MHD generators, accelerators, pumps and flowmeters are all such applications. Therefore, it is necessary to devise efficient numerical strategy for solving the MHD problem. Resources [1, 2] provide more physical background knowledge.
In this paper, we consider the stationary incompressible MHD model as follows:
along with the boundary conditions:
where \(\Omega \) represents a polyhedral domain in \(\mathbb {R}^d\), \(d=\)2 or 3, with boundary \(\partial \Omega \), \(\mathbf u \) the velocity field, \(\mathbf B \) the magnetic field, \(\mathbf f \) and \(\mathbf g \) the external force terms, p the pressure, \(R_e\) the hydrodynamic Reynolds number, \(R_m\) the magnetic Reynolds number, \(S_c\) the coupling number, and \(\mathbf n \) is the outer unit normal of \(\partial \Omega \). Correspondingly, the functions \(\mathbf u \), \(\mathbf B \), \(\mathbf f \) and \(\mathbf g \) can be described by:
for \(d=2\), and
for \(d=3\).
Investigations for the MHD equations from the perspective of various mathematical expectations thrives in the recent years. For instance, references [3–6] gave some study of well posedness, regularity and long-time behaviors of solutions and [3, 7, 8] devoted to the MHD problems from the numerical aspects. To our knowledge, the basic research for the MHD equations can be traced back to Sermange et al. [9]. And Gunzburger et al. [1] proposed the standard Galerkin finite element discretization for the stationary MHD equations. Then, Gerbeau et al. studied a stabilized finite element method for the steady MHD equations in [10]. For more extensive investigation of the steady MHD equations, please see [11–13] and their references.
It is well known that the stationary MHD equations is a strong coupled nonlinear system and it is still very difficulty to process to this system. It is because that equations (1)–(2) contain three nonlinear terms \((\mathbf u \cdot \nabla )\mathbf u \), \(\mathrm{curl}{} \mathbf B \times \mathbf B \), \(\mathrm{curl}(\mathbf u \times \mathbf B )\) and velocity \(\mathbf{u }\), pressure p and \(\mathbf{B }\) are coupled together. Hence, great attentions have been paid on iterative method in recent years. Besides, Newton iterative method for its high precision and fast resolving speed has attracted a lot of attention. For example, Newton iterative method is considered for the stationary Navier–Stokes equations by He [14], Xu and He [15]. Then, the Newton iterative method in finite element approximation for the incompressible MHD equations are investigated and analyzed in [16–18].
In addition, velocity \(\mathbf u \) and pressure p are coupled together by the incompressible constraint “\(\hbox {div}\mathbf u \)=0”, which makes the system difficult to solve numerically. To overcome this difficulty, the usual practice is to relax the incompressibility constraint in an approximate way, resulting in a class of pseudo-compressibility methods, among which are the penalty method, the pressure stabilization method, the artificial compressibility method and the projection method [19–22], etc. In this study, we consider the penalty method to decouple the strong coupled stationary incompressible MHD equations.
The penalty method applied to (1) is to approximate the solution \((\mathbf u ,p,\mathbf{B })\) by \((\mathbf u _{\epsilon },p_{\epsilon },\mathbf{B }_{\epsilon })\) satisfying the following stationary MHD equations:
and with the homogeneous boundary conditions:
where \(0<\epsilon <1\) is a penalty parameter and \(\nu _{e}=1/R_{e}\).
Although, the penalty method is to decouple \((\mathbf u ,\mathbf B )\) and p, the resulting system is still a large problem to solve. Two-level scheme is very efficient to save a large amount of computing time and give reasonable results. The main idea is to solve a small problem on a coarse mesh and correct the solution with a large linear problem on a fine mesh. This idea is put forward by Xu for the nonlinear elliptic boundary value problem in [23, 24]. Currently, some two-level strategy has been studied for the MHD equations, such as Layton et al. studied a two-level method for the reduced MHD problem in [25, 26] and Zhang studied a two-level coupled correction and decoupled parallel correction finite element methods for solving the stationary MHD equations in [27].
The present paper uses penalty finite element with two-level strategy based on two finite element discretizations for the 2D/3D stationary incompressible MHD equaions. The two-level penalty Newton iterative method involves solving m linearized variable coefficient MHD problems on the coarse mesh and a linear MHD problem with positive definite symmetric matrix. In brief, we mainly consider the finite element space pair \(\mathbf X _{h}\times \hbox {M}_{h}\times \mathbf W _{h}\) which satisfies the discrete inf-sup condition (\(P_{1}b\)-\(P_{1}\)-\(P_{1}b\)) or does not satisfy the discrete inf-sup condition (\(P_{1}\)-\(P_{0}\)-\(P_{1}\)). Furthermore, the rigorous analysis of the stability and error estimate are given for the proposed scheme. Numerical tests verify the theoretical results.
The paper is organized as follows. In Sect. 2, some basic results are given. Penalty mixed finite element method is given in Sect. 3. Section 4 is devoted to the Newton penalty iterative finite element scheme. Section 5 devotes to uniform stability and convergence of the two-level Newton penalty iterative method. Section 6 is reported to show numerical performance and accuracy of our algorithm. Finally, the article is concluded in the last section.
2 Functional Setting of the Stationary MHD Equations
To obtain the weak forms of system (1) and (3), we introduce the following notations
For simplicity, we employ the product space \(\mathbf W _{0n}=H^1_0(\Omega )^d\times H^1_n(\Omega )^d\) with the usual graph norm \(\Vert (\mathbf v ,\mathbf B )\Vert _1\), where \(\Vert (\mathbf v ,\mathbf B )\Vert _i=(\Vert \mathbf v \Vert _i^2+\Vert \mathbf B \Vert _i^2)^{\frac{1}{2}}\) for all \(\mathbf v \in H^i(\Omega )^d\cap \mathbf X , \mathbf B \in H^i(\Omega )^d\cap \mathbf W \) \((i=0,1,2)\). \(\mathbf X '\), \(\mathbf W '\) are the dual space of \(\mathbf X \) and \(\mathbf W \), respectively. And \(H^{-1}(\Omega )^d\) denotes the dual of \(H^1_0(\Omega )^d\) with the norm:
where \(\langle \cdot ,\cdot \rangle \) denotes duality product between the function space \(H^1_0(\Omega )^d\) and its dual.
Now, it is convenient to introduce the following forms:
Then, the standard weak form of (1) reads: find \(((\mathbf u ,\mathbf B ),p)\in \mathbf W _{0n}\times \hbox {M}\) such that
for all \(((\mathbf{v },\varvec{\Psi }),q)\in \mathbf W _{0n}\times \hbox {M}\) and the variational formulation of (3) is: find \(((\mathbf u _{\epsilon },\mathbf{B }_{\epsilon }),p_{\epsilon })\in \mathbf W _{0n}\times \hbox {M}\) such that for all \(((\mathbf{v },\varvec{\Psi }),q)\in \mathbf W _{0n}\times \hbox {M}\),
The following properties of \(A_0(\cdot ,\cdot )\) and \(A_1(\cdot ,\cdot ,\cdot )\) are important to give the theoretical analysis [1]: \(\forall \) \((\mathbf u ,\mathbf B )\), \((\mathbf v ,\varvec{\Psi })\), \((\mathbf w ,\varvec{\Phi })\in \mathbf W _{0n}\), there holds
where \(C_1\) (only dependent on \(\Omega \)) an embedding constant of \(H^1_n(\Omega )^d\hookrightarrow H^1(\Omega )^d\) (\(\hookrightarrow \) denotes the continuous embedding), i.e.,
where \(\sqrt{2}\) and d comes from the following two inequalities
and \(C_{0}\) (only dependent on \(\Omega \)) an embedding constant of \(H^{1}(\Omega )^d\hookrightarrow L^{4}(\Omega )^d\), i.e.
Next, we define the Stokes operator \(\mathcal {A}_{1}=-P\Delta \), and \(\Delta \) (see [28] for details) as
where \(P: L^2(\Omega )^d\rightarrow \{\mathbf{v }\in L^2(\Omega )^d,\hbox {div}\mathbf{v }=0, \mathbf{v }\cdot \mathbf n |_{\partial \Omega }=0\}\) is a \(L^{2}\)-orthogonal projector and define \(\mathcal {A}_{1\epsilon }:=\nabla \mathbf u -\frac{1}{\epsilon }\nabla \hbox {div}\mathbf u \).
Similarly, define operator \(\mathcal {A}_{2}\mathbf B =R_{0} (\nabla \times \nabla \times \mathbf{B }+\nabla \nabla \cdot \mathbf{B })\in \mathbf W \) as follows
where \(R_{0}: L^2(\Omega )^d\rightarrow \mathbf W \) is a \(L^{2}\)-orthogonal projector and define \(\mathcal {A}_{2\epsilon }:=\mathcal {A}_{2}\).
Then, we shall make use of the following assumption for the regularity estimate of \((\mathbf u ,p,\mathbf B )\) (see [29]). Assume that the boundary of \(\Omega \) is smooth and if \(\partial \Omega \) is of \(C^{2}\), or if \(\Omega \) is a convex polygon/polyhedron, we have the following results:
Assumption A
The unique solution \((\mathbf v ,q)\) of the steady Stokes problem
for the prescribed \(\mathbf f \in L^{2}(\Omega )^d\) satisfies
and the Maxwell’s equations
for the prescribed \(\mathbf g \in L^{2}(\Omega )^{d}\) admits a unique solution \(\mathbf B \in \mathbf V _{n}\) which satisfies
Besides, we set
and we know that \(\Vert \mathbf F \Vert _{-1}\le \Vert \mathbf F \Vert _{*}\).
And we introduce two properties of trilinear form in [16]:
For the sake of convenience in writing, we set
and
Here and after, C or c (with or without a subscript) will denotes a generic positive constant.
Furthermore, we recall the following lemma given in [20].
Lemma 2.1
There exists a constant \(c_{0}>0\), depending only on \(\Omega \) and such that if \(\epsilon c_{0}\le 1\)
The following existence and uniqueness of the solution of (5) are classical results [16].
Theorem 2.1
If \(R_e\), \(R_{m}\) and \(S_{c}\) satisfy the uniqueness condition
the problem (5) has a unique solution \(((\mathbf u ,\mathbf{B }),p)\in \mathbf W _{0n}\times \mathrm{M}\) which satisfies
Moreover, suppose that \(\mathbf f ,\ \mathbf g \in {L}^{2}(\Omega )^d\), then solution \(((\mathbf u ,\mathbf{B }),p)\) of the problem (5) satisfies the following regularity
Theorem 2.2
If \(R_e\), \(R_{m}\) and \(S_{c}\) satisfy the uniqueness condition
and \(\epsilon c_{0}\le 1\), then the problem (6) has a unique solution \(((\mathbf u _{\epsilon },\mathbf{B }_{\epsilon }),p_{\epsilon })\in \mathbf W _{0n}\times \mathrm{M}\) which satisfies
Moreover, suppose that \(\mathbf f ,\ \mathbf g \in L^{2}(\Omega )^d\), then solution \(((\mathbf u _{\epsilon },\mathbf{B }_{\epsilon }),p_{\epsilon })\) of the problem (5) satisfies the following regularity
Proof
We can finish the proof by the same technique used in the proof of Theorem 2.1 or refer to [18]. \(\square \)
The optimal bounds of the error \((\mathbf u -\mathbf u _{\epsilon },\mathbf B -\mathbf B _{\epsilon })\) and \(p-p_{\epsilon }\) are stated in the following theorem (see [18] for detail).
Theorem 2.3
Under the assumptions of Theorem 2.2, we have
3 Penalty Finite Element Discretizations
We consider the mixed finite element method for (5) and (6). Let \(\{K_H\}\) be a family of triangulations or tetrahedrons of \(\Omega \) into affine-equivalent finite elements K with \(\bar{\Omega }=\bigcup \limits _{K\in K_{\mu }}K\), which is assumed to be a regular and quasi-uniform partition of the domain \(\Omega \) in usual sense as \(\mu \rightarrow 0\). Let \(\mathbf X _{H}\subset \mathbf X \), \(\hbox {M}_{H}\subset \hbox {M}\) and \(\mathbf W _{H}\subset \mathbf W \) and \((\mathbf X _{H},\hbox {M}_{H},\mathbf W _{H})\subset (\mathbf X _{h},\hbox {M}_{h},\mathbf W _{h})\). For simplicity sake, we denote the set of all polynomials on K by \(P_{l}(K)\), \(l\ge 0\) and \(\mathbf W _{0n}^{\mu }=\mathbf X _{\mu }\times \hbox {M}_{\mu }\), \(\mu =h ~or ~ H\).
In order to investigate the relation of penalty parameter with the finite element pair, we consider the following finite element pairs to approximate the velocity, pressure and magnetic fields. Note that \(\mathbf X _{\mu }\times \hbox {M}_{\mu }\times \mathbf W _{\mu }\) satisfies the following properties [11, 14, 16, 22, 30]:
Let \(\rho _{\mu }\) denote the \(L^2\)-orthogonal projection which defined by
(\(\mathcal {P}_{1}\)). Firstly, we consider the unstable finite element pair
It is known that \(\mathbf X _{\mu }\times \hbox {M}_{\mu }\) does not satisfy the discrete inf-sup condition,
However, there exists a mapping \(\pi _{\mu }: H^2(\Omega )^d\cap \mathbf V \rightarrow \mathbf X _{\mu }\) and \(\rho _{\mu }: \hbox {M}\rightarrow \hbox {M}_{\mu }\) satisfy
for all \(\mathbf v \in H^{2}(\Omega )^{d}\cap \mathbf V \), \(q\in H^{1}(\Omega )\cap \hbox {M}\), and a mapping \(R_{\mu }:H^{2}(\Omega )^d\cap \mathbf V _{n}\rightarrow \mathbf W _{\mu }\) satisfying

Meanwhile, there holds the following relation:
(\(\mathcal {P}_{2}\)). Then, we may employ a stable finite element pair to approximate the velocity, pressure and magnetic field:
where
In this case, \(\mathbf X _{\mu }\times \hbox {M}_{\mu }\) satisfies the discrete inf-sup condition (24). However, (27) does not hold. Besides, there exists a mapping \(\pi _{\mu }:H^{2}(\Omega )^d\cap \mathbf X \rightarrow \mathbf X _{\mu }\), and \(\rho _{\mu }:\hbox {M}\rightarrow \) \( \hbox {M}_{\mu }\) satisfy (25) and
Besides, mapping \(R_{\mu }: H^{2}(\Omega )^d\cap \mathbf V _{n}\rightarrow \mathbf W _{\mu }\) satisfies (26).
Now, the corresponding discrete weak form of (6) is recast: find \(((\mathbf u _{\epsilon \mu },\mathbf{B }_{\epsilon \mu }),p_{\epsilon \mu })\in \mathbf W _{0n}^{\mu }\times \hbox {M}_{\mu }\) such that
Next, we introduce the discrete analogue of space \(\mathbf V \) as
Denote \(P_{\mu }: L^2(\Omega )^d\rightarrow \mathbf V _{\mu }\) and \(R_{0\mu }: L^2(\Omega )^d\rightarrow \mathbf W _{\mu }\) by \(L^{2}\)-orthogonal projectors.
Here, we define discrete Stokes operator \(\mathcal {A}_{1\mu }=-P_{\mu }\Delta _{\mu }\), and \(\Delta _{\mu }\) (see [28])
and define discrete operator \(\mathcal {A}_{2\mu }\mathbf B _{\mu }=R_{0\mu } (\nabla _{\mu }\times \nabla \times \mathbf{B }_{\mu }+\nabla _{\mu }\nabla \cdot \mathbf{B }_{\mu })\in \mathbf W _{\mu }\) as follows (see [30])
Theorem 3.1
Under the assumptions of Theorem 2.2 and if \(\mathbf{X }_{\mu }\times \hbox {M}_{\mu }\) satisfies property \(\mathcal {P}_{k}\), \(k=1,2\), then (29) admits a unique solution \(((\mathbf u _{\epsilon \mu },\mathbf{B }_{\epsilon \mu }),p_{\epsilon \mu })\in \mathbf W _{0n}^{\mu }\times \hbox {M}_{\mu } \) such that
and
Proof
Refer to the proof of Theorem 3.3 in [18] for details. \(\square \)
3.1 \(H^1\)-Error Estimate for Penalty Finite Element Galerkin Method
Theorem 3.2
Under the assumptions of Theorem 2.2 and if \(\mathbf{X }_{\mu }\times \hbox {M}_{\mu }\) satisfies property \(\mathcal {P}_{k}\), \(k=1,2\), then we have the following error estimate
Proof
Subtracting (29) from (6), we have the error equation
Taking \((\mathbf v ,\varvec{\Psi })=(\mathbf e ,\mathbf b )\) and \(q=\eta \) in (30) with \((\mathbf e ,\mathbf b )=(\pi _{\mu }\mathbf u _{\epsilon }-\mathbf u _{\epsilon \mu },R_{\mu }\mathbf{B }_{\epsilon }-\mathbf{B }_{\epsilon \mu })\) and \(\eta =\rho _{\mu }p_{\epsilon }-p_{\epsilon \mu }\). According to (10) and (23), we can get
Combining (8)–(9) with (16), gives
Together with (7), (9) and (16), we can derive
For \(\mathcal {P}_{1}\), we use (27) to get
applying (32)–(34) and assumption \(\mathcal {P}_{1}\) gives
which imply that
For \(\mathcal {P}_{2}\), we use (28) to get
which and (32)–(33), \(\mathcal {P}_{2}\) give
and using (25), (26) imply that
Finally, combining the discrete inf-sup condition (24) with (7), (9), (30), (39), Theorems 2.2 and 3.1, gives
which imply that
This completes the proof. \(\square \)
3.2 \(L^2\)-Error Estimate for Penalty Finite Element Galerkin Methods
In order to analyze the error \((\mathbf u -\mathbf u _{\epsilon \mu },\mathbf B -\mathbf B _{\epsilon \mu })\) with \(L^{2}\)-norm, we now use the standard duality argument. Before that, we will give the duality form of (3).
Lemma 3.1
For some given \(\mathbf G :=(G_{1},G_{2})\in L^{2}(\Omega )^{d}\times L^{2}(\Omega )^{d}\) and the solution of \(((\mathbf u _{\epsilon },\mathbf{B }_{\epsilon }),p_{\epsilon })\) of (3), the duality form of (3) is find \((\mathbf w ,s,\varvec{\Phi })\in \mathbf X \times \hbox {M}\times \mathbf W \) by
Proof
The duality form of (3) can be derived by the following technique.
Subtract (29) from (6) to get the error equation
which is
Let \((\mathbf u _{\epsilon }-\mathbf u _{\epsilon \mu },\mathbf B _{\epsilon }-\mathbf B _{\epsilon \mu })=(\mathbf v ,\varvec{\Psi })\), \(p_{\epsilon }-p_{\epsilon \mu }=q\) and \((\mathbf v _{\mu },\varvec{\Psi }_{\mu })=(\mathbf w ,\varvec{\Phi })\), \(q_{\mu }=s\) in the above equation, we have
and let \(A_{1}((\mathbf v ,\varvec{\Psi }),(\mathbf v ,\varvec{\Psi }) ,(\mathbf w ,\varvec{\Phi }))=(((\mathbf v ,\varvec{\Psi }),\mathbf G )\), then we can derive the duality form of (3). \(\square \)
As for (42), we can prove the following existence, uniqueness and regularity results.
Theorem 3.3
Under the assumptions of Theorem 3.2, (42) admits a unique solution \((\mathbf w ,s,\varvec{\Phi })\in \mathbf X \times \hbox {M}\times \mathbf W \), and \((\mathbf w ,\varvec{\Phi })\) satisfies the following estimate:
Moreover, the solution \((\mathbf w ,\varvec{\Phi })\) of (42) satisfies the following regularity:
Proof
If \(\mathbf f \in \mathbf X '\) and \(\mathbf g \in \mathbf W '\), then \((\mathbf u _{\epsilon },\mathbf B _{\epsilon })\) satisfies Theorem 2.2. Then, taking \((\mathbf v ,\varvec{\Psi })=(\mathbf w ,\varvec{\Phi })\) and \(q=s\) in
we can have
then we can prove that (45) is \((\mathbf W _{0n},\hbox {M})\)-coercive. By the Lax-Milgram’s Lemma, (42) admits a unique solution. Using (42) and (46), we can have (43).
Moreover, we derive from (42) that
where \(\bar{a}_{1}'(\mathbf v ,\mathbf w )\) and \(c'(B,w)\) are defined as
Taking the scalar product of (47) with \((\mathcal {A}_{1\epsilon }\mathbf w ,\mathcal {A}_{2\epsilon }\varvec{\Phi })\) in \(L^{2}(\Omega )^{d}\) yields
It follows from (14), Theorem 2.1 and (43) that
Taking \(q=0\) in (42) with Assumption A, (14) yields
Then, we can finish the proof with the above estimations and Lemma 2.1. \(\square \)
From (44) and the property \(\mathcal {P}_{1}\) or \(\mathcal {P}_{2}\), we deduce that \(((\pi _{\mu }\mathbf w ,R_{\mu }\varvec{\Phi }),\rho _{\mu }s)\) satisfies the following error estimate results:
Theorem 3.4
Under the assumptions of Theorem 3.2, there holds the following error bound:
Proof
Taking \(\mathbf G =(\mathbf u _{\epsilon }-\mathbf u _{\epsilon \mu },\mathbf{B }_{\epsilon }-\mathbf{B }_{\epsilon \mu })\) and \((\mathbf v ,\varvec{\Psi })=(\mathbf u _{\epsilon }-\mathbf u _{\epsilon \mu },\mathbf{B }_{\epsilon }-\mathbf{B }_{\epsilon \mu })\), \(q=p_{\epsilon }-p_{\epsilon \mu }\) in (42), we can get
Next, we derive from (6) and (29) with \((\mathbf v ,\varvec{\Psi })=(\pi _{\mu }\mathbf w ,R_{\mu }\varvec{\Phi })\), \(q=\rho _{\mu } s\) that
Subtracting (51) from (50), yields
From (7), (9) and (49), we can get
Applying (9), (49) and Theorem 2.2, yields
Finally, from \(\mathcal {P}_{1}\) and \(\mathcal {P}_{2}\), we can derive that
Then, the proof ends. \(\square \)
4 Newton Iterative Method
Newton iterative method in penalty finite element method based on finite element pair \(\mathcal {P}_{1}\) and \(\mathcal {P}_{2}\) is introduced as follows.
Algorithm 4.1
Find \(((\mathbf u _{\epsilon \mu }^{n},\mathbf{B }_{\epsilon \mu }^{n}),p_{\epsilon \mu }^{n})\in \mathbf W ^{\mu }_{0n}\times \hbox {M}_{\mu }\) such that for all \(((\mathbf v ,\varvec{\Psi }),q)\in \mathbf W ^{\mu }_{0n}\times \hbox {M}_{\mu }\)
Here, \(((\mathbf u _{\epsilon \mu }^{0},\mathbf B _{\epsilon \mu }^{0}),p_{\epsilon \mu }^{0})\) is defined by the discrete penalty equations:
for all \(((\mathbf v ,\varvec{\Psi }),q)\in \mathbf W _{0 n}^{\mu }\times \hbox {M}_{\mu }\).
Next, we establish the stability of the iterative method for \((\mathbf e ^{n},\mathbf b ^{n})=(\mathbf u _{\epsilon \mu }-\mathbf u _{\epsilon \mu }^{n},\mathbf B _{\epsilon \mu }-\mathbf B _{\epsilon \mu }^{n})\) and \(\eta ^{n}=p_{\epsilon \mu }-p_{\epsilon \mu }^{n}\). Firstly, we give a key lemma from [16].
Lemma 4.1
The trilinear term \(A_{1}(\cdot ,\cdot ,\cdot )\) satisfies the following estimate
for all \((\mathbf u _{\mu },\mathbf B _{\mu }),(\mathbf w _{\mu },\varvec{\Phi }_{\mu }),(\mathbf v _{\mu },\varvec{\Psi }_{\mu })\in \mathbf W _{0n}^{\mu }\).
Theorem 4.1
Under the assumptions of Theorem 2.2 and suppose that \(\mathcal {P}_{1}\) and \(\mathcal {P}_{2}\) are valid, if
then \((\mathbf u _{\epsilon \mu }^{m},\mathbf{B }_{\epsilon \mu }^{m})\) and \(p_{\epsilon \mu }^{m}\) defined by the Newton iterative method satisfy
and \((\mathbf e ^m,\mathbf b ^m)\), \(\eta ^m\) satisfy the following bounds:
for all \(m\ge 0\).
Proof
We can derive the estimate (62)–(66) with the similar technique used in [18]. \(\square \)
5 Two-Level Newton Iterative Penalty Finite Element Method
In this part, we consider the two-level penalty finite element method. The method includes two algorithms: m steps by Newton iteration on the coarse mesh H and once correction by Stokes iteration on the fine mesh h.
Algorithm 5.1
Step I. Find a coarse grid iterative solution \(((\mathbf u _{\epsilon H}^m,\mathbf B _{\epsilon H}^m),p_{\epsilon H}^{m})\in \mathbf W _{0n}^{H}\times \hbox {M}_{H}\) defined by
for \(n=1,2,\ldots ,m\), where \(((\mathbf u _{\epsilon H}^0,\mathbf B _{\epsilon H}^0),p_{\epsilon H}^{0})\) is determined by
for all \(((\mathbf v ,\varvec{\Psi }),q)\in \mathbf W _{0n}^{H}\times \hbox {M}_{H}\).
Step II. Find a fine grid solution \(((\mathbf u _{\epsilon mh},\mathbf B _{\epsilon mh}),p_{\epsilon mh})\in \mathbf W _{0n}^{h}\times \hbox {M}_{h}\) defined by
for all \(((\mathbf v ,\varvec{\Psi }),q)\in \mathbf W _{0n}^{H}\times \hbox {M}_{H}\).
For the simplicity, we take \((\mathbf e _{h},\mathbf b _{h})=(\mathbf u _{\epsilon h}-\mathbf u _{\epsilon mh},\mathbf B _{\epsilon h}-\mathbf B _{\epsilon mh})\), \(\eta _{h}=p_{\epsilon h}-p_{\epsilon mh}\). Then, we have the following theorem.
Theorem 5.1
Under the assumptions of Theorem 4.1, then \(((\mathbf u _{\epsilon mh},\mathbf B _{\epsilon mh}),p_{\epsilon mh})\) of (69)–(70) satisfy
and \((\mathbf e _{h},\mathbf b _{h})\), \(\eta _{h}\) satisfy the following bounds:
Proof
Taking \((\mathbf v ,\varvec{\Psi })=(\mathbf u _{\epsilon mh},\mathbf B _{\epsilon mh})\) and \(q=p_{\epsilon mh}\) in (70) with (8), (9), (61) and (62), we arrive at
then, we can have
And for \(\mathcal {P}_{1}\), from (78), we can have
which is that
For \(\mathcal {P}_{2}\), taking \(q=0\) in (70) with (7), (9), (24), (79), (61) and (62), we can have
Next, we will give the error estimate.
Subtracting (70) from (29) with \(\mu =h\), we can have the following error equation
Take \((\mathbf v ,\varvec{\Psi })=(\mathbf e _{h},\mathbf b _{h})\), \(q=\eta _{h}\) in (80) with (8), (9), (14) and Theorem 3.1, we have
which guarantees that
For \(\mathcal {P}_{1}\), from Theorems 3.4, 4.1 and (81), we derive that
and with (82), we have
which is that
And for \(\mathcal {P}_{2}\), with the aids of \(\mathcal {P}_{1}\), from Theorem 3.4, Theorem 4.1 and (81),
and with (24), (81), (7), (84), Theorem 3.4 and Theorem 4.1, we deduce that
Then, we complete the proof. \(\square \)
Theorem 5.2
Under the assumptions of Theorem 3.2, for the two-level Newton iterative penalty finite element method with \(\mathcal {P}_{1}\), the optimal error estimate is
\(\epsilon \) and H can be taken as \(\epsilon =O(h^{\frac{1}{2}})\), \(H^2=O(\epsilon ^{\frac{1}{2}}h)\) and the convergence rate is \(O(h^{\frac{1}{2}})\); for the two-level Newton iterative penalty finite element method with \(\mathcal {P}_{2}\), the optimal error estimates are
\(\epsilon \) and H can be taken as \(\epsilon =O(h)\), \(H^2=O(h)\) and the convergence rate is O(h).
Proof
We can finish the proof by Theorems 2.3, 3.2 and 5.1, triangle inequality and some simple calculations. \(\square \)
6 Numerical Results
In this section we report on the numerical performance of the method established in this paper with two finite element pairs \(\mathcal {P}_{k}\) (\(k=\) 1, 2) for the 2D/3D MHD cases. The first one is a flow problem with a smooth solution. The second one is a Hartmann flow problem. And the last one is a driven cavity flow problem. The iterative tolerance is set as \(10^{-10}\) for numerical implementations.
Remark 6.1
(1) The penalty parameter \(\epsilon \) is selected as \(\epsilon =O(h^{\frac{1}{2}})\) for \(\mathcal {P}_{1}\) and \(\epsilon =O(h)\) for \(\mathcal {P}_{2}\) based on Theorem 5.2 in all the following numerical tests.
(2) \(R_{e}\), \(R_{m}\) and \(S_{c}\) are optional constants in uniqueness condition \(\sigma \) which defined in (16).
(3) The constant \(C_{0}\) can be obtained by the Ladyzhenskaya inequalities and the Poincar\(\acute{e}\) inequality (see [18])
for the bounded domain, the \(\kappa \) is given by
where \(\lambda _{min}\) is the smallest eigenvalue of Laplace operator. And, for the unit domain \([0,1]^d\)
(4) The constant \(C_{1}\) can be estimated by (11) and (12),
(5) The negative norm \(\Vert \mathbf F \Vert _{-1}\) by \(\left( \Vert \mathbf f \Vert ^2_{-1}+\Vert \mathbf g \Vert ^2_{*}\right) ^{\frac{1}{2}},\) where \(\Vert \mathbf f \Vert _{-1}\) and \(\Vert \mathbf g \Vert _{*}\) are evaluated by the following two problems (refer to [16] for details):
-
Solving the following Poisson’s equation
$$\begin{aligned} -\Delta \varvec{\Upsilon }=\mathbf f ,~\hbox {in}~ \Omega , \end{aligned}$$(90)with the homogeneous Drichlet boundary condition. So that we have
$$\begin{aligned} \Vert \mathbf f \Vert _{-1}=\Vert \nabla \varvec{\Upsilon }\Vert _{0}. \end{aligned}$$(91)
-
Solving the problem
$$\begin{aligned} \left\{ \begin{array}{lll} \hbox {curl}\hbox {curl}\varpi =\mathbf g ,&{} \hbox {in}~\Omega ,\\ \hbox {div}\varpi =0, &{} \hbox {in}~\Omega ,\\ \varpi \cdot \mathbf n =0,&{} \hbox {on}~\partial \Omega ,\\ \hbox {curl}\varpi \times \mathbf n =0,&{} \hbox {on}~\partial \Omega , \end{array} \right. \end{aligned}$$(92)results in
$$\begin{aligned} \Vert \mathbf g \Vert _{*}=\Vert \hbox {curl}\varpi \Vert _{0}. \end{aligned}$$

(2D) Slices along \(x=5,-1<y<1\): computed (points) and theoretical (lines)

(3D) Slices along \(x=5,-2<y<2,z=0\): computed (points) and theoretical (lines)

Errors \(\Vert |(\mathbf e ^{m},\mathbf b ^{m})\Vert |_{1}\) versus iterative number m by a log–log plot: 2D (a); 3D (b)

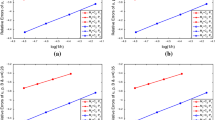
Comparison results versus \(R_{e}\) by a log–log plot

Comparison results versus \(R_{m}\) by a log–log plot

Comparison results versus \(S_{c}\) by a log–log plot

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(R_{e}=1\)

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(R_{e}=5\cdot 10^2\)

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(R_{e}=5\cdot 10^3\)

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(R_{m}=5\cdot 10^2\)

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(R_{m}=5\cdot 10^3\)

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(S_{c}=10^3\)

Numerical streamlines (a); the isobars (b); and isodynamic (c) with \(S_{c}=10^5\)
6.1 Problems with Smooth Solutions
In this case, we test the accuracy performance of our proposed methods with a smooth solution. On the square domain \(\Omega =[0,1]^d\), \(d=2,3\) and the exact solutions be given by
for \(d=2\) and
for \(d=3\). \(\alpha \) is chosen such that \(0<\sigma <\frac{5}{11}\) and the body forces \(\mathbf f \), \(\mathbf g \) are determined accordingly for any \(R_{e}\), \(R_{m}\) and \(S_{c}\).
Firstly, we consider the convergence performance of Algorithm 5.1 with \(R_{e}=1\), \(R_{m}=1\) and \(S_{c}=1\). According to Theorem 5.2, the settings of coarse, fine mesh and penalty parameter scales are based on \(\epsilon =O(h^{\frac{1}{2}})\), \(H^2=O(\epsilon ^{\frac{1}{2}}h)\) for \(\mathcal {P}_{1}\) and \(\epsilon =O(h)\), \(H^2=O(h)\) for \(\mathcal {P}_{2}\). To illustrate the property of Algorithm 5.1, we compare the numerical results with Algorithm 4.1.
Tables 1, 2, 3, 4, 5, 6, 7 and 8 present the convergence performances of Algorithm 5.1 and Algorithm 4.1 with \(\mathcal {P}_{1}\) and \(\mathcal {P}_{2}\) for 2D/3D cases, in which \(K_{div\mathbf u }=\max \limits _{K_{h}(\Omega )}|\int _{K}\hbox {div}\mathbf u _{h}dx|\) and \(K_{div\mathbf{B }}=\max \limits _{K_{h}(\Omega )}|\int _{K}\hbox {div}\mathbf{B }_{h}dx|\). From the comparison results, we can conclude that the relative errors are almost the same for the same finite element pair for Algorithm 5.1 and Algorithm 4.1, respectively. And the relative errors of \(\mathcal {P}_{1}\) is smaller than \(\mathcal {P}_{2}\) with decrease of mesh size h. Moreover, the proposed scheme remain much the same property (i.e. \(\hbox {div}\mathbf u =0\), \(\hbox {div}\mathbf{B }=0\)) as the original equations. However, the computing CPU time of Algorithm 5.1 takes a lot less time than Algorithm 5.1 and the method with \(\mathcal {P}_{1}\) save much computational time than the one with \(\mathcal {P}_{2}\).
And we can see that all kinds of methods work well and keep the convergence rates just like the theoretical analysis in Theorem 5.2. In details, the method with \(\mathcal {P}_{1}\) converge with a rate of 1 / 2 and the method with \(\mathcal {P}_{2}\) converge with 1. Specifically, the magnetic field \(\mathbf B \) and the velocity field \(\mathbf u \) has an improved convergence rate, it is even higher than the theoretical result \(O(h^{1/2})\).
6.2 Hartman Flow
In this example, we consider both 2D and 3D Hartmann flow with \(Ha=\sqrt{R_{e}R_{m}S_{c}}\). For 2D, we treat a steady undirectional flow in the channel \(\Omega =[0,10]\times [-1,1]\) under the influence of the transverse magnetic field \(B_{0}=(0,1)\). The analytical solutions are:
with
We impose the following boundary conditions:
where \(p_{d}(x,y)=p(x,y)\), \(p_{0}\) is a constant and I is identity matrix. Whilst, 3D Hartmann flow in a rectangular duct \(\Omega =[0,L]\times [-y_{0},y_{0}]\times [-z_{0},z_{0}]\) with \(L=10, y_{0}=2, z_{0}=1\) under the influence od a magnetic field \(\mathbf B _{d}=(0,1,0)\) has the following form
with
where
the boundary conditions are imposed by
Take \(G=0.1\) and choose the following two cases to simulate 2D problem:
and choose the following two cases to simulate 3D problem:
For the 2D problem, the analytical solutions of u(y) and B(y) along with numerical ones \(u(y_{k})\) and \(B(y_{k})\) (\(y_{k}=-1+0.1k,~k=0,\ldots ,20\)) obtained by Algorithm 5.1 for \(\mathcal {P}_{i}(i=1,2)\) with parameters (a)–(b) are presented in Fig. 1. And the analytical solutions u(y, z) and B(y, z) along with numerical ones \(u(y_{k},0)\) and \(B(y_{k},0)\)(\(y_{k}=-2+0.1k,~k=0,\ldots ,40\)) with parameters (c)–(d) for the 3D problem are shown in Fig. 2. It can be inferred that Algorithm 5.1 can achieve the desired results with \(\mathcal {P}_{i}(i=1,2)\) for different Hartmann numbers.
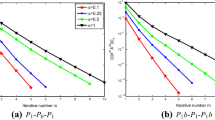
The following work is to investigate the convergence exponent m in (76). It is known that \((\frac{15}{13}\sigma )^{2^m-1}\) will converge gradually under \(\frac{15}{13}\sigma <1\) with the increase of m. But it is difficult to give the direct verification of m. Figure 3 presents the relation between the error \(\Vert |(\mathbf e _{m},\mathbf b _{m})\Vert |_{1}\) and the iterative number m by a log–log plot compared with a reference curve defined by \(f(m)=c(\sigma )^{2^m-1}\), where c is constant. Thereout, we can see that the curve by \(\Vert |(\mathbf e _{m},\mathbf b _{m})\Vert |_{1}\) have almost the same shape as the curve f(m). Then, we finished the verification of the relation in (76) indirectly.
6.3 Driven Cavity Flow
Let us consider a classic 2D test problem used in fluid dynamics, known as driven cavity flow. It is a model of the flow in a cavity with the lid moving in one direction: In this example, we consider the two-dimensional domain \(\Omega =(-1,1)\times (-1,1)\) with \(\Gamma _{D}=\partial \Omega \), and set the source terms to be zero. The boundary conditions are prescribed as follows:
where \(\mathbf{B }_{D}=(1,0)\).
In this case, we consider the deep research on the relation between \(R_{e}\), \(R_{m}\) and \(S_{c}\). According to the experiment 6.1, we know that finite element pair \(\mathcal {P}_{1}\) is of low measurement accuracy. Here we only test the method with \(\mathcal {P}_{2}\) for different equation parameters. Numerical results of Algorithm 5.1 are compared with the standard two-level Newton iterative method to show the merits of the proposed scheme.
Figures 4, 5 and 6 present the horizontal velocity, pressure and magnetic field distribution at the mid-width for various \(R_{e}\), \(R_{m}\) and \(S_{c}\). It can be concluded that our results show an excellent agreement with the standard two-level Newton iterative method. And the numerical streamline, isobar and isodynamic of the cavity flow for different hydrodynamic Reynolds numbers, magnetic Reynolds numbers and coupling coefficients are presented in Figs. 7, 8, 9, 10, 11, 12 and 13.
Figures 7, 8 and 9 illustrate the numerical results of Algorithm 5.1 for \(R_{e}=1,5\cdot 10^2,5\cdot 10^3\) with \(R_{m}=1\) and \(S_{c}=1\). As can be seen that the velocity main vortex grows into several small ones and become more complex with the increase of \(R_{e}\). The experiment results of the proposed method for \(R_{m}=5\cdot 10^2,\ 5\cdot 10^3\) with \(R_{m}=1\) and \(S_{c}=1\) are reported in Figs. 10 and 11. We can see that the velocity vortex and isobar remain almost unchanged, but the isodynamic has changed a lot. And the numerical results for \(S_{c}=10^3,10^5\) with \(R_{e}=1\) and \(R_{m}=1\) are presented in Figs. 12 and 13. It can be inferred that more resolved vortexes may captured with the increase of \(S_{c}\).
7 Conclusions
Combining the best algorithmic features of two-level scheme and Newton iterative technique based on penalty method, we presented a two-level Newton penalty finite element method for the 2D/3D stationary incompressible MHD equations. The main idea includes three part: firstly, to decouple the strong coupled system with a penalty term in the incompressible constraint; secondly, to save large amount of CPU time with two-level strategy; last, to deal with the nonlinear term with Newton iteration. Stability and error estimates of the method was analysed. Numerical results illustrated the theoretical results and demonstrated the efficiency of the proposed method. Besides, this method can be extended to time-dependent problems and more decoupling method will be discussed in the future.
References
Gunzburger, M., Meir, A., Peterson, J.: On the existence, uniquess and finite element approximation of solutions of the equations of sationary, incompressible magnetohydrodynamic. Math. Comput. 56, 523–563 (1991)
Moreau, R.: Magneto-hydrodynamics. Kluwer Academic Publishers, Dordrecht (1990)
Cao, C., Wu, J.: Two regularity criteria for the 3D MHD equations. J. Differ. Equ. 248, 2263–2274 (2010)
He, C., Wang, Y.: On the regularity criteria for weak solutions to the magnetohydrodynamic equations. J. Differ. Equ. 238, 1–17 (2007)
Schonbek, M., Schonbek, T., Solli, E.: Large-time behaviour of solutions to the magnetohydrodynamics equations. Math. Ann. 304, 717–756 (1996)
Sermange, M., Temam, R.: Some mathematical questions related to the MHD equations. Commun. Pure Appl. Math. 36, 635–664 (1983)
Salah, N., Soulaimani, A., Habashi, W.: A finite element method for magnetohydrodynamics. Comput. Methods Appl. Mech. Eng. 190, 5867–5892 (2001)
Codina, R., Silva, N.: Stabilized finite element approximation of the stationary magnetohydrodynamics equations. Comput. Mech. 38, 344–355 (2006)
Sermange, M., Temam, R.: Some mathematical questions related to the MHD equations. Commun. Pure Appl. Math. 36, 635–664 (1983)
Gerbeau, J.: A stabilized finite element method for the incompressible magnetohydrodynamic equations. Numer. Math. 87, 83–111 (2000)
Ravindran, S.: Linear feedback control and approximation for a system governed by unsteady MHD equations. Comput. Methods Appl. Mech. Eng. 198, 524–541 (2008)
Salah, N., Soulaimani, A., Habashi, W.: A finite element method for magnetohydrodynamics. Comput. Methods Appl. Mech. Eng. 190, 5867–5892 (2001)
Meir, A., Schmidt, P.: Analysis and numerical approximation of a stationary MHD flow problem with nonideal boundary. SIAM J. Numer. Anal. 36, 1304–1332 (1999)
He, Y., Li, J.: Convergence of three iterative methods based on the finite element discretization for the stationary Navier–Stokes equations. Comput. Methods Appl. Mech. Eng. 198, 1351–1359 (2009)
Xu, H., He, Y.: Some iterative finite element methods for steady Navier–Stokes equations with different viscosities. J. Comput. Phys. 232, 123–152 (2013)
Dong, X., He, Y., Zhang, Y.: Convergence analysis of three finite element iterative methods for the 2D/3D stationary incompressible magnetohydrodynamics. Comput. Methods Appl. Mech. Eng. 276, 287–311 (2014)
Dong, X., He, Y.: Two-level Newton iterative method for the 2D/3D stationary incompressible magnetohydrodynamics. J. Sci. Comput. 63, 426–451 (2015)
Su, H., Feng, X., Huang, P.: Iterative methods in penalty finite element discretization for the steady MHD equations. Comput. Methods Appl. Mech. Eng. 304, 521–545 (2016)
Shen, J.: On error estimates of some higher order projection and penalty-projection methods for Navier–Stokes equations. Numer. Math. 62, 49–73 (1992)
Shen, J.: On error estimates of the penalty method for unsteady Navier–Stokes equations. SIAM J. Numer. Anal. 32, 386–403 (1995)
He, Y.: Optimal error estimate of the penalty finite element method for the time-dependent Navier–Stokes equations. Math. Comput. 74, 1201–1216 (2005)
He, Y., Li, J., Yang, X.: Two-level penalized finite element methods for the stationary Navier–Stoke equations. Int. J. Inf. Syst. Sci. 2, 131–143 (2006)
Xu, J.: A novel two two-grid method for semilinear elliptic equations. SIAM J. Sci. Comput. 15, 231–237 (1994)
Xu, J.: Two-grid discretization techniques for linear and nonlinear PDEs. SIAM J. Numer. Anal. 33, 1759–1777 (1996)
Layton, W., Lenferink, H., Peterson, J.: A two-level Newton finite element algorithm for approximating electrically conducting incompressible fluid flows. Comput. Math. Appl. 28, 21–31 (1994)
Layton, W., Meir, A., Schmidtz, P.: A two-level discretization method for the stationary MHD equations. Electron. Trans. Numer. Anal. 6, 198–210 (1997)
Zhang, G., Zhang, Y., He, Y.: Two-level coupled and decoupled parallel correction methods for stationary incompressible magnetohydrodynamics. J. Sci. Comput. 65, 920–939 (2015)
He, Y.: Two-level method based on fnite element and Crank–Nicolson extrapolation for the time-dependent Navier–Stokes equations. SIAM J. Numer. Anal. 41, 1263–1285 (2003)
Gerbeau, J., Le Bris, C., Lelièvre, T.: Mathematical Methods for the Magnetohydrodynamics of Liquid Metals, Numerical Mathematics and Scientific Computation. Oxford University Press, New York (2006)
He, Y.: Unconditional convergence of the Euler semi-implicit scheme for the 3D incompressible MHD equations. IMA J. Numer. Anal. 35, 767–801 (2014)
Acknowledgments
The authors sincerely thank the editor and referees for their valuable comments and suggestions which helped us to improve the results of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work is supported by the Natural Science Foundation of Xinjiang Province (No. 2016D01C073).
Rights and permissions
About this article

Cite this article
Su, H., Feng, X. & Zhao, J. Two-Level Penalty Newton Iterative Method for the 2D/3D Stationary Incompressible Magnetohydrodynamics Equations. J Sci Comput 70, 1144–1179 (2017). https://doi.org/10.1007/s10915-016-0276-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10915-016-0276-8
Keywords
- Magnetohydrodynamics equations
- Penalty finite element method
- Newton iteration
- Two-level method
- Inf-sup condition
- Error estimate