
Abstract
Discrete hard fault is always tested in existing node selection methods for analog circuit diagnosis. Actually, analog component parameter changes continuously and output node voltages distribute in a continuous voltage interval. In this paper, an novel test node selection method is proposed for continuous parameter shifting (CPS) fault. Firstly, CPS faults are sampled by parameter scan simulation in a single test frequency. Collected node voltages are seen as a data set in a statistical distribution. Secondly, ambiguous faults are identified according to the independent distributions of all CPS faults. The independence of CPS fault sample is deduced by Kruskal-Wallis non-parametric testing. Then, new fault dictionaries are generated for each test node according to ambiguous interval. The proposed fault dictionary represents the mutual independence of each pair of CPS faults. Finally, as fault dictionaries are considered as connected graphs, the optimal test nodes are selected based on an improved depth first search (DFS) algorithm. The effectiveness of method is verified by testing linear and nonlinear circuits.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Analog circuit diagnosis is still an unresolved task especially due to the lack of a feasible fault model. As not all test points are measurable and necessary, the optimal test point selection can effectively improve the efficiency of analog diagnosis. Methods of analog fault diagnosis are mainly classified into two main categories: simulation before test (SBT) and simulation after test (SAT). Fault dictionary method is one of the most popular methods and belongs to SBT. Accordingly, the existing test point selection methods are mainly based on binary fault dictionary.
Various selection criteria have been proposed for test point selection. Slamani and Kaminska propose fault sensitivity to select test node [19, 21]. The maximum isolated fault is applied to select test node proposed by Pinjala and Bruce [16]. Starzyk introduces an entropy based approach to select the near minimum test point set [23]. Several special information contents are introduced as different criteria for test node selection [2, 4, 17, 22].
Another task of test point selection is the design of selection strategy. Skowron and Starzyk prove that the global minimum set of test point can only be guaranteed by the exhaustive search method, which has been proven to be NP-hard [20, 23]. Therefore, several strategies based on heuristic search methods are widely studied. Lin and Elcherif propose two heuristic methods to select optimal test node [13, 22]. A genetic algorithm based method is introduced by Golonek and Rutkowsk [4]. Zhang and He propose an ant colony search algorithm to select the optimal test point [27]. A heuristic selection method based on particle swarm optimization is studied by Jiang and Wang [7]. Heuristic graph search is applied by Yang and Tian [24]. Moreover, the heuristic method of greedy randomized adaptive search is introduced by Lei and Qin [12].
Integer-coded fault dictionary and ambiguity gap are commonly applied for the above mentioned methods. Integer-coded dictionary proposed by Lin [13] and Hochwald [6] is the most popular dictionary. Moreover, Yang and Tian introduce a dictionary based on fault-pair boolean Table [25], and an extended fault dictionary is improved by Luo and Wang based on overlapped area value [15]. Generally, fault dictionary is generated based on fault ambiguity gap. The voltage of 0.7 V is often used as the ambiguity gap for discrete hard fault [5, 13, 17, 23]. Other special voltage gaps are also introduced in some references [18, 25]. However, it points out that the unified fault ambiguous gap is not always suitable for all analog component faults [13, 15, 28]. As so far, the diagnosis of continuous parameter shifting (CPS) fault is still a challenge task due to the lack of soft fault model [26]. Discrete parameter shifting soft (DPS) faults have been wildly tested [1, 4, 14, 23]. Discrete parameter fault is the component normal parameter adding or subtracting its tolerance value. Open fault and short fault are hard fault. They are specific DPS faults [26]. Hard fault has been widely studied in existing test node selection methods [4, 12, 15,16,17, 23,24,25]. Moreover, the unified ambiguity gap is only suitable for DPS fault testing.
This paper aims at studying an optimal test node selection method for CPS faults. So far, CPS modeling is still a hard problem for analog circuit testing. Symbolic technique [3], transfer function coefficient estimation method [8, 9], approximated transfer function coefficient estimation [10], and inverse problem-based method [11] are introduced to continuous fault diagnosis. Transfer functions are required for these mentioned methods. Moreover, Yang proposes a new complex field model for CPS fault [26]. As it needs to obtain ambiguous fault according to CPS fault model, all these existing parameter models haven’t been applied to test node selection.
Considering the test object of CPS fault and the generation of ambiguous CPS fault, this paper proposes a new test selection method by non-parameter test and graph search. CPS faults are sampled by the combination of parameter sweep and AC sweep in Pspice software. Continuous component parameter changes by decade sweeping. The continuous node voltages are sampled in a single test frequency. In addition, test intervals of CPS fault are calculated through Kruskal-Wallis non-parameter test. The intervals are seen as ambiguous fault gaps, which are different for each kind of fault. Then, new fault dictionaries are generated based on fault test intervals for each test node. These binary fault dictionaries are considered as connected graphs. Finally, an improved DFS algorithm is introduced to search the optimal test nodes.
This paper is presented in the followings. Section 2 introduces basic principles of new method. In section 3, the procedures of new test node selection are written. The experiment details and results are discussed in section 4. Finally, conclusions are presented in section 5.
2 Principle of New Method
2.1 Continuous Parameter Shifting Fault
Discrete soft fault and hard fault are widely studied for analog fault diagnosis. Then can be seen as discrete parameter shifting fault [26]. The paper has been proved that analog component parameter is continuous and the fault node voltage can be any value within the range of [Us Uo], where Us and Uo are extreme minimum and maximum faults, which approximately represent short and open faults respectively [26]. This kind of fault is named as CPS fault [26]. As component fault parameter is not in a single fault state, plenty of node voltages need to be sampled for CPS fault. They are collected by simulation software in this paper. It is a simple and effective way to collect all samples of a CPS fault.
CPS faults are sampled by parameter sweep and AC sweep. In order to decrease the sample size, component parameter changes by decade sweeping and continuous node voltages are sampled in a single appointed test frequency. Figure 1 shows four kinds of CPS fault for the first test circuit in test node of n11. This circuit is described in section 4.1. The parameter scan range is from 10−11F to 10−3F for the capacitance component, where 10−11F and 10−3F represent extreme minimum and maximum faults, respectively. 81 discrete voltages are collected through decade sweeping. The appointed test frequency is 1 kHz. As shown in Fig. 1, node voltages of CPS capacitance fault continuously change in the scanning range.

CPS faults of capacitance
2.2 Fault Dictionary Based on Kruskal-Wallis Non-Parametric Test
Although, it is a continuous relationship between component parameters and test node voltages as shown in Fig. 1, the output voltages are discretely sampled. Moreover, Fig. 1 shows fault voltage intervals between extreme minimum and maximum faults are uncertain and non-unique for different kinds of CPS fault. In this paper, a statistical method is introduced to detect ambiguous CPS fault. Ambiguous CPS faults are judged by the distribution of fault voltage. If the distributions of two CPS fault samples aren’t independent for each other, they are ambiguous CPS faults. In statistical theory, non-parametric test is useful to estimate the overall distribution of a data set. In this paper, Kruskal-wallis non-parametric test is applied to estimate the distribution of CPS fault sample. This statistical method can deduce whether the distributions of different CPS fault samples are independent.
Figure 2 shows test intervals of 16 CPS faults sampled in test node of n1 by Kruskal-Wallis non-parametric test located in two dimension space for the first test circuit. The lines of Fig. 2 represent different kinds of fault. If the width of lines overlap together, the non-parametric test rejects the hypothesis that the faults represented by lines are independent. This paper considers these kinds of fault are ambiguous. The ambiguous faults are drawn by the dashed lines. The compared fault is f1 in Fig. 2. It shows that the faults of {f2, f5,f7,f8} drawn by the dashed lines are ambiguous for fault f1 and other faults drawn by the solid lines are independent for fault f1. The results indicate that there is a significant difference between fault f1 and faults of {f3,f4,f6,f9 ~ f16} by Kruskal-Wallis non-parametric test. Moreover, no significant difference exists between fault f1 and fault group of {f2, f5,f7,f8}. These results suggest that the samples in fault group of {f1,f2,f5,f7,f8} come from the same distribution in high probability, and the samples in fault groups of {f1,f3,f4,f6,f9 ~ f16} come from different distributions in high probability. Therefore, the ambiguous fault set for fault f1 is {f1,f2,f5,f7,f8} in test node n1. In addition, according to the test interval results of Fig. 2, the ambiguous set is {f1,f2,f5,f6,f7,f8} for fault f2. Accordingly, the ambiguous sets for other CPS faults can be obtained. Hence, the ambiguous fault sets for each fault are different based on the intervals of Kruskal-Wallis non-parametric test.

Test intervals by Kruskal-Wallis non-parametric test
If there are n CPS faults for a test circuit, n non-parametric test results are calculated for each test node, and all faults are the appointed fault in order to generated fault dictionary. Based on the distribution results of Kruskal-Wallis testing, fault dictionary can be generated for each test node. Fault dictionary is a n × n matrix. The row and column of dictionary represent all appointed faults. The ith line (or the ith list) of matrix shows the distributions between the ith fault and other faults. This binary fault dictionary is generated according to the returned probability value p from Kruskal-Wallis testing. The returned probability indicates whether Kruskal-wallis rejects the null hypothesis that all data samples come from the same distribution at an appointed significance level or accepts the hypothesis. Significance level is a small probability criterion which can be used to determine the allowable limit of the judgment. If the returned probability is lower than an appointed significance level (the default significance level is 0.05 in Matlab statistical toolbox), the dictionary code is 1. Otherwise the dictionary code is 0. Code 1 represents the voltage samples of the compared CPS faults are significant difference and the distributions of the compared faults are independent. Code 0 means the compared faults come from the same distribution in high probability and they are ambiguous. For example, as the returned probability for appointed fault f1 and compared fault f7 is the biggest and it is more than 0.05, the dictionary code is 1. This result also can be approximately obtained from Fig. 2. It shows that the overlap width between lines of f1 and f7 is the largest. Therefore, fault f7 has the highest probability to be an ambiguous fault to fault f1.
Table 1 lists dictionary codes for the faults drawn in Fig. 2. The appointed fault is f1. Other 15 faults are compared faults. For example, in the third line, as 0.339 is bigger than the default significance level of 0.05, the dictionary code is 0. The same results are also obtained for the compared fault set of {f5,f7,f8}. Therefore, the ambiguous fault set is {f1,f2,f5,f7,f8} for fault f1.
2.3 Optimal Test Nodes Searched by Improved DFS Algorithm
As the introduced fault dictionary is a n × n binary matrix for each test node, where n is the number of CPS fault, a test circuit with m test nodes has m fault dictionaries. This is obviously different from the traditional node selection method which has one fault dictionary. The traditional fault dictionary is coded for test node. This fault dictionary is coded for test fault. It is caused by the difference of test objects. The test object of traditional node selection method is discrete hard fault with a single ambiguous gap, however the object of this method is continuous parameter soft fault. Moreover, the collected fault data is a statistical sample set for this method. Therefore, ambiguous fault characters can’t be judged by a single ambiguous gap. According to non-parameter test, the introduced fault dictionary can express the mutual independence of all pairs of CPS faults through statistical analysis. In order to find all independent CPS faults for each test node, the fault dictionary is considered as a connected graph. Therefore, an improved DFS algorithm is introduced to search the connected sub-graph in this paper. The graph nodes of sub-graph represent mutually independent CPS faults.
DFS algorithm is a graph search algorithm. It searches every possible deep path. Each node can only access at one time. Time complexity of algorithm is O(e), where e is the number of connected edge. Actually, as the target of test node selection is not only for deep connected sub-graph but also for mutually independent CPS faults, the time complexity for test node selection is less than O(e). This limitation reduces the algorithm complexity. The improved DFS algorithm is described as below.
-
1)
Visit the first node in the first line of the dictionary. Perform the second step until the nth node in the nth line has been visited, where the nth node represents the nth CPS fault. The sub-graph with the largest number of connected node is returned for each search.
-
2)
Recursive search the next graph node by the improved DFS algorithm. The limitations of selection are the next selected node should not have been accessed and should be connected to all selected nodes.
Figure 3 is the flow chart of the introduced DFS algorithm. Table 2 lists an example of fault dictionary. Its connected graph in two dimension space is drawn in Fig. 4. The symbols of connected nodes represent all kinds of faults. The lines between nodes mean these faults are not ambiguous for each other. In addition, the axes of X and Y indicate the two dimension space location of fault. According to the introduced improved DFS algorithm, the algorithm performs 6 times as the fault dictionary is a 6 × 6 matrix. The final search results are six connected sub-graphs. Each returned sub-graph has the maximum number of graph node. Three of sub-graphs are different. They are three optimal search paths shown in Fig. 5. The axes of X and Y also indicate the two dimension space location of fault. The connected nodes of sub-graphs represent mutually independent CPS faults.

Flow chart of the improved DFS algorithm

Connected graph for fault dictionary listed in Table 2

Three connected sub-graphs searched by the improved DFS algorithm
3 New Method for Test Node Selection
3.1 Procedure of Test Node Selection
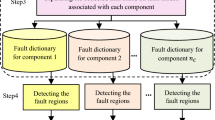
According to the above introduction, the procedures of new test node selection are written as follow.
-
1)
Sample node voltages of all CPS faults by parameter scanning. In this paper, the resistance parameter changes from 0.1 Ω to 10+6 Ω and the capacitance parameter changes from 10−11 F to 10−3 F. Component parameters represent extreme minimum and maximum faults, respectively. They increases by decade sweeping.
-
2)
Generate fault dictionary for each test node due to the returned test intervals, which are calculated by Kruskal-Wallis non-parametric test. The threshold of significance level is the default value of 0.05 in Matlab tool box. It is an experience value and is suitable for most of statistical analysis. If the returned probability of non-parametric test is larger than 0.05, the fault dictionary code is 0. Otherwise, the code is 1.
-
3)
Search the connected sub-graphs based on the improved DFS algorithm, which is mentioned in section 2. n connected sub-graphs with the maximum graph nodes are returned.
-
4)
Calculate the change degree for each test node. It gives priority to select the test node with the biggest change degree. If more than one test node has the same change degree, the test node with the largest sub-graph node is selected.
-
5)
List faults which are represented by sub-graph nodes. Delete these faults in all sub graphs. If all faults are listed, the optimal test node set is obtained. Otherwise, back to step 4.
Not all analog component faults have the transitivity. Voltages in some test nodes almost don’t change when some component parameters alter obviously. The reason is these component faults can’t be reflected in these test nodes. Therefore, it is unreasonable to label these faults by a unified ambiguous fault gap. Figure 6 shows that the output voltages of test node n1 almost don’t change in the CPS fault state of f3 for the first test circuit. The abscissa axis of Fig. 6 shows capacitance parameter by 10 time frequency scan in Pspice software, which changes from 10−11 F to 10−3 F. CPS fault of f3 can’t be detected in test node n1 as its voltage change can’t be reflected in test node n1. Hence, the variance of voltage sample is used to detect the variability of sample in this method. If the sample has no difference to the mean value of total data, its variance equals to zero in statistics theory. The smaller variance is, the smaller sample difference has. However, due to the parameter tolerance of analog component, the variance of test data sampled by Pspice is not equal to zero even though they come from the same fault. It supposes that two data samples are from the same fault state when their variance is 0.0001(nearly to zero). If the variances of m faults are not equal to zero in one test node, it defines that the change degree is m for this test node. The change degree represents the fault reflection sensibility for one test node. Therefore, it gives priority to select the test node with the biggest change degree in step 4.

Node voltages of f3 for the first test circuit
3.2 Algorithm Time Complexity
Suppose that the numbers of CPS fault and test node are N F and N T . The time complexity of Kruskal-Wallis non-parametric test is the same as DFS algorithm. They are \( O\left({N}_F^2\cdot {N}_T\right) \). The time complexity of change degree calculation is O(N F ⋅ N T ). Moreover, if m test nodes are selected, the time complexity of deleting all faults in sub-connected graph table is O(N F ⋅ m). Therefore, the total time complexity of the proposed algorithm is \( O\left({N}_F^2\cdot {N}_T+{N}_F^2\cdot {N}_T+{N}_F\cdot {N}_T+ m\cdot {N}_F\right)\approx O\left({N}_F^2\cdot {N}_T\right) \).
The algorithm is compared with other five methods as shown in Table 3. This method is more complex than the methods proposed in references of [16, 17, 22]. The time complexity of these methods are O(N F ⋅ p ⋅ log N F ) and O(N F ⋅ m ⋅ N T ⋅ log N F ), where p is a probability value and m is the number of selected test nodes. The reason is this method spends more time for Kruskal-Wallis non-parametric testing and DFS searching. In addition, as this method doesn’t need to perform non-parametric testing and DFS algorithm searching for each selection, it is not complex than the methods in papers of [15, 24]. Their time complexities are \( O\left( m\cdot {N}_F^2\cdot {N}_T\right) \). All calculations of non-parametric testing and graph searching have been done before the new node selection. For example, N F and N T is 16 and 11 for the first test circuit in section 4.1, the practical time complexities of these methods are O(16 ⋅ log 16 ⋅ p), O(16 ⋅ m ⋅ 16 ⋅ log 16), O(m ⋅ 162 ⋅ 11)and O(162 ⋅ 11), respectively.
4 Tests and Results
4.1 The First Test
The first test circuit is a bandpass filter circuit [15,16,17, 23, 25, 28]. All analog components are simulated in a given tolerance range. The tolerances are 5% and 10% for resistance and capacitance, respectively. The nominal parameters and 11 test nodes are shown in Fig. 7. The excitation signal is a sinusoidal wave with 1 kHz frequency and 4 V amplitude, which is the same as in papers of [15,16,17, 23, 25, 28]. 16 kinds of CPS fault are tested. Table 4 lists all faults and their labels. CPS fault models in Table 4 are referred to paper of [26]. Parameter analysis and AC analysis are simulated by Pspice. Only the voltages of 1 kHz frequency are sampled. The mean actual cost time is about 7.08 s for the first circuit.

Bandpass filter circuit
16 CPS faults are tested. Figure 8 only shows six CPS faults in test node n1. The rest of 10 faults doesn’t be drawn as they are not sensitive in test node n1. Their voltage samples are almost unchanged in test node n1. It considers that fault samples with less than 0.0001 variance is not sensitive to test node. Therefore, the change degree of test node n1 is 6. Table 5 lists all change degrees. Table 5 shows some test nodes are redundant for some kinds of faults. Not all test nodes are capable of reflecting all component faults. Only test node n11 can reflect all component faults for the first circuit shown in Table 5. Its change degree is 16. Therefore, the first selected test node is n11.

Six CPS faults in test node n1
The next step is fault dictionary generation based on Kruskal-Wallis non-parameter test. Each test node has a fault dictionary. There are eleven fault dictionaries. Table 6 lists fault dictionary codes of test node n11. Code 1 represents the distribution of fault sample is independent. Otherwise, they are ambiguous faults. For example, the first line in Table 6 shows that only the distributions of {f4, f5, f14, f15, f16} are independent to the distribution of fault f1. It means that the difference of the sample distribution between fault f1 and other faults is not obvious.
Fault dictionary is considered as a connected graph. Figure 9 shows the connected graph of dictionary listed in Table 6. The axes of X and Y indicates the two dimension space location of fault. Then, 16 connected sub-graphs are searched based on the improved DFS algorithm for all test nodes. Table 7 shows all returned sub graphs.

Connected graph of fault dictionary listed in Table 5
Then, the optimal test node set is selected according to the results of Table 7. Firstly, test node of n11 is selected as it has the largest change degree shown in Table 5. Secondly, the largest sub graph of {f1,f4,f15} for test node n11 is found based on sub graphs listed in Table 7. Then, faults of {f1,f4,f15} are deleted in Table 7.
Moreover, it continues to find the next optimal test node which has the largest change degree and the largest sub graph. Until all faults are deleted in Table 7. Table 8 shows the results of all steps. The optimal test node set for the first test is {n2,n9,n10,n11} after deleting the repeated test nodes.
Table 9 lists the compared results of different methods. The introduced method obtains different optimal test nodes as the test object is CPS fault in this method and the object tested by the compared methods is discrete hard fault. CPS faults are detected according to the independence distribution of sample. Test nodes of {n9, n11} are selected for all methods. Node of n11 has the biggest change degree and node of n9 has the biggest sub graph. Although the evaluation criteria are different, the test results also show the effectiveness of the proposed method. It is a good candidate for CPS fault test.
4.2 The Second Test
The second test is a nonlinear circuit. It is a negative feedback circuit shown in Fig. 10 [28]. The tolerances of analog component are also 5% and 10% for resistance and capacitance. The input signal is a sinusoidal wave with 1 kHz frequency and 7 mV amplitude, which is the same as in paper of [28]. Table 10 lists 17 CPS faults. Simulation of CPS fault is the same as the first circuit. Nine test nodes are labeled in Fig. 10. Table 11 lists all change degrees for the second circuit. The node change degrees of {n1,n3,n4} are zero. It means voltage samples in these test nodes are almost unaltered for all CPS faults based on the variance of 0.0001. Therefore, faults can’t be detected in these test nodes. However, test nodes of {n7,n8, n9} are very sensitive for CPS faults. Only fault of f11 can’t be reflected in these three nodes. The mean actual cost time is 7.33 s for the second circuit.

Negative feedback circuit
Table 11 shows that the numbers of unchanged CPS fault node for n7, n8, and n9 are the same. Fault voltages are the most sensitive in these three test nodes. Figure 11 only shows six capacitance CPS faults in node n8. All capacitance CPS faults continuously change between extreme minimum and maximum fault. The intervals of output node voltage are obviously more than 0.7 V. Nine fault dictionaries are generated. The threshold of significance level is also 0.05. Figure 12 shows test intervals for fault f1 based on Kruskal-wallis non-parametric test. This figure shows that faults of {f2 ~ f5,f10,f14,f17} are ambiguous for fault f1. The distributions of their voltage samples aren’t independent to the distribution of fault f1. Then, due to test intervals of each fault, fault dictionary is generated for node n8 as shown in Table 12. Moreover, Fig. 13 shows a connected graph of this fault dictionary. The axes of X and Y indicate the two dimension space location of fault.

Capacitance faults in node n8

Test intervals of fault f1

Connected graph for Table 11
Then, 17 sub graphs are searched for all test nodes based on the improved DFS algorithm. The results are shown in Table 13. The first selected test node is n7 due to its biggest change degree. Thus, the faults of {f1,f4,f7,f9} are deleted in Table 13. After the cyclic execution of step 4 described in section 3, the final optimal test node set is {n1,n3, n6,n7, n9} for the second test circuit. Test results are listed in Table 14.
This method is also compared with four different methods. Their results are shown in Table 15. In paper of [28], 10 test nodes are tested for the same circuit. Node n7 and node n8 in paper of [28] are labeled as the same test node in experiment. As shown in Table 15, Pinjala’s method needs all nine test nodes and Starzyk’s and Yang’s methods select eight optimal test nodes. Moreover, seven test nodes are selected in Zhao’s method. Only five test nodes are chosen for this introduced method. These test nodes can detect all CPS faults. Faults of {n1,n3, n7, n9} are chosen for all compared methods. Therefore, the results prove this method is also effective to the second test circuit.
5 Conclusion
A new test node selection method is studied for analog fault test in this paper. Continuous parameter faults are detected based on non-parametric test and connected graph theory. Two circuits are tested to verify the effectiveness of the introduced method. The results show that this method is a good candidate to test node selection and it is suitable to test linear and nonlinear circuits. According to the paper, conclusions are written as below.
-
1)
This method is effective to test CPS fault. It is an efficient and simple way to sample CPS fault through parameter scan simulation. The collected continuous node voltages can be used to diagnose analog continuous parameter fault in the further work, which is still a hard problem for analog circuit diagnosis so far.
-
2)
The collected voltage of CPS fault is not a single value. They are continuous samples. Therefore, the unified ambiguous voltage gap such as 0.7 V is not suitable to measure the ambiguous gap of CPS fault. The statistical results of Kruskal-Wallis non parameter test represent the mutual independence of all fault distributions. The results prove this statistical method is useful to judge ambiguous CPS fault.
-
3)
The introduced change degree of test node is very necessary for test node selection. Not all faults can be reflected in each test node. Simulation results show that some CPS fault voltages are nearly unchanged in some test nodes. It means that these faults can’t be detected in these test nodes based on node voltage. However, this factor hasn’t been considered in exiting node selection methods. Hence, it is reasonable to give priority to select the test node with the biggest change degree.
-
4)
In order to improve the search efficiency, the fault dictionary is searched by an improved DFS algorithm. This method is not an exhaustive search method, which has been proven to be NP-hard. Therefore, the selected test nodes are the approximate optimal results. Further research is needed to improve the efficiency of this method. In addition, the search algorithm for CPS fault should be studied by exhaustive search method in the next work.
However, CPS faults are approximately represented by extreme minimum and maximum faults. Actually this model can’t represent the realistic hard fault. Therefore, continuous parameter fault modeling is still a research difficulty for analog circuit test in the further work.
References
Aminian F, Aminian M, Collins HW (2002) Analog fault diagnosis of actual circuits using neural networks. IEEE Trans Instrum Meas 51(3):544–550
Augusto JS, Almeida C (2006) A tool for test point selection and single fault diagnosis in linear analog circuits. In Proceeding XXI International Conference on Design of Systems and Integrated Systems, Barcelona, Spain
Fedi G, Manetti S, Piccirilli MC, Starzyk J (1999) Determination of an optimum set of testable components in the fault diagnosis of analog linear circuits. IEEE Trans Circuits Syst 46(7):779–787
Golonek T, Rutkowski J (2007) Genetic-algorithm- based method for optimal analog test points selection. IEEE Trans Circuits Syst Express Briefs 54(2):117–121
Hochwald W, Bastian JD (1979) A DC approach for analog fault dictionary determination. IEEE Trans Circuits Syst 26:523–529
Horowitz E, Sahni S (1978) Fundamentals of computer algorithms. Computer Science Press, Maryland
Jiang RH, Wang HJ, Tian SL, Long B (2010) Multidimensional fitness function DPSO algorithm for analog test point selection. IEEE Trans Instrum Meas 59(6):1634–1641
Kavithamani A, Manikandan V, Devarajan N, Ramakrishnan K (2011) Improved coefficient based test for diagnosing parametric faults of analog circuits, In Proc. IEEE region Conf. TENCON, 64-68
Kavithamani A, Manikandan V, Devarajan N (2011) Soft fault diagnosis of analog circuit using transfer function oefficients, In Proc. Int. Conf PACC, 1–6
Kincl Z, Kolka Z (2011a) Approximate parametric fault diagnosis. IEEE International Conference On Radioelektronika. IEEE, Brno, pp 1–4
Kincl Z, Kolka Z (2011b) Parametric fault diagnosis using overdetermined system of fault equations[C]. IEEE International Conference on Microwaves, Communications, Antennas and Electronics Systems, Tel Aviv, Israel, pp 1–4
Lei H, Qin K (2014) Greedy randomized adaptive search procedure for analog test point selection. Analog Integr Circ Sig Process 79:371–383
Lin PM, Elcherif YS (1985) Analogue circuits fault dictionary-new approaches and implementation. Int J Circuit Theory Appl 13(2):149–172
Luo H, Wang Y, Cui J (2011) A SVDD approach of fuzzy classification for analog circuit fault diagnosis with FWT as preprocessor. Expert Syst Appl 38(3):10554–10561
Luo H, Wang Y, Lin H, Jiang Y (2012) A new optimal test node selection method for analog circuit. J Electron Test 28(3):279–290
Pinjala KK, Bruce CK (2003) An approach for selection of test points for analog fault diagnosis, in proceeding of the 18th IEEE International symposium on defect and fault tolerance in VLSI Systems, 278-294
Prasad VC, Babu NSC (2000) Selection of test points for analog fault diagnosis in dictionary approach. IEEE Trans Instrum Meas 49(6):1289–1297
Prasad VC, Rao Pinjala SN (1995) Fast algorithms for selection of test nodes of an analog circuit using a generalized fault dictionary approach. Circuits Systems Signal Process 14(6):707–724
Saab K, Hamida NB, Kaminska B (2001) Closing the gap between analog and digital testing. IEEE Trans Comput Aided Des Integr Circuits Syst 20(2):307–314
Skowron A, Stepaniuk J (1991) Toward an approximation theory of discrete problems part I. Fundamenta Informaticae 15(2):187–208
Slamani M, Kaminska B, Quesnel G (1994) An integrated approach for analog circuit testing with a minimum number of detected parameters, in Proceedings of International test Conference, 631-640
Spaandonk J, Kevenaar T (1996) Iterative test-point selection for analog circuits, in proceedings of 14th VLSI test symposium, 66-71
Starzyk JA, Liu D, Liu ZH, Nelson DE, Rutkowski JO (2004) Entropy-based optimum test points selection for analog fault dictionary techniques. IEEE Trans Instrum Meas 53(3):754–761
Yang CL, Tian SL, Long B (2009) Application of heuristic graph search to test points selection for analog fault dictionary techniques. IEEE Trans Instrum Meas 58(7):2145–2158
Yang CL, Tian SL, Long B, Fang C (2010) A novel test point selection method for analog fault dictionary techniques. J Electron Test 26(5):523–534
Yang CL, Yang J, Liu Z, Tian S (2014) Complex field fault modeling-based optimal frequency selection in linear analog circuit fault diagnosis. IEEE Trans Instrum Meas 63(4):813–825
Zhang CJ, He G, Liang SH (2008) Test point selection of analog circuits based on fuzzy theory and ant colony algorithm, In IEEE AUTOTESTCON Systems readiness technology Conference, 164-168
Zhao D, He Y (2015) A new test point selection method for analog circuit. J Electron Test 31:53–66
Acknowledgments
This work is supported by National Youth Natural Science Foundation of China (No. 61401215), National Natural Science Foundation of China (No. 61371041), Natural Science Youth Foundation in Jiangsu Province (No.BK20130696), Youth Science and Technology Innovation Fund of Nanjing Agricultural University (No.KJ2013041). The authors are grateful for editors and anonymous reviewers who make constructive comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Responsible Editor: T. Xia
Rights and permissions
About this article

Cite this article
Luo, H., Lu, W., Wang, Y. et al. A New Test Point Selection Method for Analog Continuous Parameter Fault. J Electron Test 33, 339–352 (2017). https://doi.org/10.1007/s10836-017-5661-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10836-017-5661-1