Abstract
Collisions between wildlife and vehicles represent the main conflict between infrastructures and ecosystems. Road mortality is the largest single cause of death for many vertebrates, representing a growing phenomenon of remarkable dimension. Most studies in road ecology investigated spatial roadkill patterns, showing that roadkill probability is often higher near optimal habitat for a large amount of species. Landscape connectivity has been less often considered in roadkill research, and only few studies considered habitat suitability and landscape connectivity at the same time. The purpose of the present study was to evaluate the relative importance of habitat suitability and landscape connectivity in determining roadkill risk for a habitat-generalist carnivore, namely, the Eurasian badger in the Abruzzo region (Central Italy). We collected occurrence data of living individuals from camera trapping and roadkill data of through a Citizen Science initiative. We used the occurrence data to produce a habitat suitability model (HSM) and a landscape connectivity model (LCM). Both HSM and LCM were then used as predictors in combination with road characteristics to fit a roadkill risk model. We found that landscape connectivity was more important than habitat suitability in determining roadkill risk for the Eurasian badger. Overall, the density of regional roads was the most important variable. Our finding highlighted how important is to consider landscape connectivity in planning mitigation measures aimed to preserve habitat-generalist species.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Human-wildlife interactions are constantly increasing worldwide, with relevant impacts on biodiversity and ecosystems (Sala et al. 2000; Sinclair and Byrom 2006). Road networks are known to provide a noticeable contribution to human footprint (Sanderson et al. 2002; Ibisch et al. 2016). The impacts of roads on wildlife include habitat loss and fragmentation; chemical, light, and noise pollution; barrier effect; spread of invasive species; and mortality by roadkill (Forman et al. 2003; Van der Ree et al. 2015). In particular, wildlife-vehicle collisions are among the most common road-related impacts on animal populations (Forman and Alexander 1998; Coffin 2007), causing great economic damages and entailing serious risks for driver safety (Conover et al. 1995; Seiler 2005).
A very large number of vertebrates die worldwide along such linear infrastructures (González-Gallina et al. 2013; D’Amico et al. 2015), sometimes with significant impacts on the population persistence of species (Fahrig et al. 1995; Mumme et al. 2000; Borda-de-Agua et al. 2014). Consequently, in the last decades, the number of studies focusing on the factors determining roadkill risk has increased considerably (Forman et al. 2003; Van der Ree et al. 2015; D’Amico et al. 2018). A central topic in roadkill research is the spatial distribution of casualties, which is probably the most investigated issue in road ecology (e.g., Van der Ree et al. 2015; D’Amico et al. 2018). Most studies have investigated the association between roadkill probability and some spatial variables characterizing road features or traffic volume, but also environmental predictors are increasingly considered in roadkill research (Litvaitis and Tash 2008; D’Amico et al. 2015). Unsurprisingly, several studies focusing on a large amount of different species showed that roadkill probability is higher near optimal habitat for such species (Roger et al. 2012; D’Amico et al. 2015; Visintin et al. 2016). Landscape connectivity, defined as the degree to which the landscape facilitates or impedes individual movement among patches of resources (Taylor et al. 1993), has been less often considered in roadkill research, whereas only few studies considered habitat suitability and landscape connectivity at the same time. Some of them considered landscape connectivity as a direct consequence of habitat suitability, i.e., the distance between suitable patches of habitat for given species (Grilo et al. 2011; Kang et al. 2016). Such studies showed that the roadkill risk of forest mammals was higher in well-connected areas (Grilo et al. 2011; Santos et al. 2013; Kang et al. 2016), but their approach was inadequate to disentangle habitat suitability from landscape connectivity. Among the studies that included both habitat suitability and landscape connectivity in their analyses of roadkill risk, some were focused on species highly dependent on given habitats, thus highlighting habitat suitability as more important than landscape connectivity (Girardet et al. 2015). Such evidence suggests that both habitat suitability and landscape connectivity might be relevant factors in determining roadkill risk, although their relative importance depends on the habitat specialization degree of the analyzed species (Girardet et al. 2015). Moving beyond the studies that explored this pattern for habitat specialists (e.g., Santos et al. 2013; Girardet et al. 2015), we aimed to evaluate the relative importance of habitat suitability and landscape connectivity for a habitat-generalist carnivore, i.e., the Eurasian badger (Meles meles; Kruuk 1989; De Marinis et al. 2002; Virgós et al. 2005), one of the most road-killed carnivores in Europe (e.g., Seiler et al. 2004; Jaarsma et al. 2007; Grilo et al. 2009). Particularly, the low degree of specialization of the badger makes the species able to exploit small patches of natural or semi-natural habitats, rather than strictly relying on wide, contiguous areas (Dondina et al. 2018). Consequently, we hypothesized that landscape connectivity will be more important than habitat suitability in determining the roadkill risk of this species. Since some previous studies on this topic were carried out at a local scale (Santos et al. 2013; Kang et al. 2016), we also decided to establish our study area at a regional scale, focusing on the Abruzzo region in Central Italy.
Methods
Study area
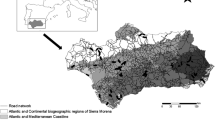
The study was set in the Abruzzo region (Central Italy; Fig. 1). The region covers ca. 10,800 km2, with an elevation ranging from the sea level to ca. 2900 m a.s.l. The climate of the region is Mediterranean along the coast (with hot/dry summers and mild/rainy winters) and Continental in the inner Apennine mountain areas (with warm/dry summers and cold winters with abundant rain and snow). This region hosts several ecosystems: the coastal plains include mainly urbanized and cultivated environments with fragmented natural habitats (especially along riparian strips). Mixed forests are located throughout the sub-montane areas, while beech forests and montane shrublands and grasslands occur towards the higher elevations. The region is totally included in the distribution range of the badger in Italy (Rondinini et al. 2013; Kranz et al. 2016). The human population density is ca. 122 inhabitants/km2 (higher in the coastal plains and decreasing towards the inner mountains). The total length of the road network is 21,249.46 km, and the road density is 1.96 km/km2 (70% local roads, 27% regional roads, and 2.6% highways; OpenStreetMap, https://planet.openstreetmap.org. Accessed December 2017).

Study area. Blue diamonds indicate living badgers’ occurrences, while yellow triangles locate roadkill events. Occurrences showed in the figure were already filtered for spatial aggregation. The red lines represent the road network. A colored version of this figure is available in the online version of the paper
Species data
We opportunistically collected occurrence data of both living and road-killed badgers. The occurrence data about living badgers were originally gathered by camera trapping carried out between 2013 and 2016 and made available upon request by a number of protected areas in the study region (i.e., Majella National Park, Monte Genzana Alto Gizio Nature Reserve, Zompo Lo Schioppo Nature Reserve, Calanchi di Atri Nature Reserve, Castel Cerreto Nature Reserve, and Cascate del Verde Nature Reserve). The roadkill data were collected between 2007 and 2016 along the whole regional road network through a Citizen Science initiative (Centro Studi per le Reti Ecologiche; csre.riservagenzana.it). Although opportunistic data may provide accurate predictions of species distribution (Tiago et al. 2017), they are often spatially auto-correlated and/or discontinuous (Boitani et al. 2011) due to a likely unbalanced sampling effort that can vary widely across space (van Strien et al. 2013). Therefore, both the living and the roadkill occurrences were checked for spatial aggregation (Suppl. Mat. 1). After this filtering step, we obtained 57 records for living badgers and 39 for roadkill events (Fig. 1; Tables S1 and S2). Since living and roadkill occurrences were gathered through an opportunistic sampling, we tested if these sampled data were able to comprehensively capture the environmental variability represented in the study area (Suppl. Mat. 4) (Fig. 2).

Roadkill risk map. Risk increases (decreases) towards red (blue) colors. A colored version of this figure is available in the online version of the paper
Analytical framework
As a first step, we used the occurrence data about living badgers to produce a habitat suitability model (HSM) and a landscape connectivity model (LCM). Both HSM and LCM were then used as predictors in combination with road characteristics to fit a roadkill risk model (RRM) based on the roadkill occurrences (see below).
Habitat suitability model
We calibrated the HSM using three topographic and two vegetation predictors: altitude, slope, topographic roughness, vegetative normalized difference vegetation index (NDVI), and non-vegetative NDVI. We selected these predictors according to the ecological requirements of the badger in Italy (e.g., Prigioni and Deflorian 2005; Prigioni et al. 2008; Balestrieri et al. 2009; Biancardi et al. 2014; Chiatante et al. 2017). Specifically, we selected altitude and slope as they proved particularly important in driving badger occurrence (i.e., the species mostly occurs from 1300 to 1500 m and between 21 and 40°; see Prigioni and Deflorian 2005). Furthermore, the role of the topographical roughness in determining badger occurrence was highlighted in Newton-Cross et al. (2007). As regards NDVI, we selected this index as it describes vegetation amount and it is strictly related to vegetation productivity. Indeed, the European badger shows a strong dependence on forests with high tree coverage, as well as of forest remnants, which offer shelter, setts, and food resources (fruits, earthworms, and insects; for the use of NDVI as a variable for predicting the distribution of the European badger, see also Requena-Mullor et al. 2014, 2017; Santos et al. 2016).
The three topographic predictors were obtained from a digital elevation model (DEM; data available from the Abruzzo Region Cartographic Service; Wilson et al. 2007), while the two vegetation predictors were derived from the NDVI, a remotely sensed measure of greenness that is correlated to net primary productivity (Ramesh et al. 2017). We calculated the NDVI values from Landsat 7 imagery (data available from the U.S. Geological Survey) for the same years of the records of the living badgers. We obtained the NDVI values for the growing period by averaging the NDVI values for the vegetative period (April–September) and for the non-growing period (October–March) in order to account for a possible variation in habitat use (e.g., Mateo-Sánchez et al. 2015; Ramesh et al. 2017). The five predictors were rasterized at a spatial resolution of 40 m. We finally checked the absence of multicollinearity among the predictors by posing a variance inflation factor ≤ 5 (Zuur et al. 2010).
The Eurasian badger is a habitat generalist widely distributed across the Western Palaearctic (Kranz et al. 2016), the study area representing a small portion. Several evidences showed that the environmental truncation in the niche estimation obtained when the study area encompasses just a small portion of the species global range produces severely biased predictions (Barbet-Massin et al. 2010; Raes 2012; Guisan et al. 2014). Therefore, we used a hierarchical structure to produce the HSM. The model was first fitted considering the badger global range and bioclimatic variables (global HSM, further details were provided in Suppl. Mat. 2). The five local predictors described above were then used to refine the projections at a regional scale (Pearson et al. 2004; Lomba et al. 2010; Gallien et al. 2012; Di Febbraro et al. 2015). For HSM calibration, we randomly placed a set of 10,000 background points in the study area (Phillips et al. 2006; Barbet-Massin et al. 2012). HSM was calibrated using an ensemble forecasting approach, as implemented in the R package biomod2 (Thuiller et al. 2009). We considered the following six modeling algorithms: generalized linear models (GLM), generalized additive models (GAM), generalized boosted models (GBM), random forests (RF), and maximum entropy models (MAXENT; Thuiller et al. 2009). The occurrence dataset was randomly split into a 70% sample, used for the calibration of the model, and a remaining 30%, used to evaluate the model predictive performance, repeating the procedure 20 times and averaging the results. The predictive performance of the model was assessed by measuring the area under the receiver operating characteristic curve (AUC; Hanley and McNeil 1982) and the true skill statistic (TSS; Allouche et al. 2006). According to AUC, prediction accuracy can be considered excellent (AUC > 0.90), good (0.80 > AUC < 0.90), fair (0.70 > AUC < 0.80), and poor (AUC < 0.60; Swets 1988). According to TSS, prediction accuracy can be considered excellent (TSS > 0.75), good (0.40 > AUC < 0.75), and poor (TSS < 0.40; Landis and Koch 1977). To avoid using poorly calibrated models, only projections from models with AUC ≥ 0.70 were considered in all the subsequent analyses (Di Febbraro et al. 2016). The model averaging was performed by weighting the individual model projections respectively by their AUC scores and averaging the results (Marmion et al. 2009). The final consensus HSM was projected over the Abruzzo region.
Landscape connectivity model
Landscape connectivity for badger in the study area was built using the CIRCUITSCAPE software (McRae et al. 2008). This software relies on the electrical circuit theory to incorporate multiple random walk pathways, working on a set of habitat nodes and a resistance surface to calculate the relative cost of moving through the entire landscape (McRae et al. 2008). This approach is especially suitable for mesocarnivores, because it assumes that individuals have no inherent knowledge of the landscape beyond their immediate surroundings (McClure et al. 2016; Reed et al. 2017). To avoid pitfalls related to wide area generalization (Pelletier et al. 2014) and arbitrary choice of source (start nodes) and destination (end nodes; Koen et al. 2014), we adopted a “tiling” approach (Anderson et al. 2014; further details were provided in Suppl. Mat. 3). To produce the resistance surface used to build the LCM, we reclassified a land use/land cover map (data available from the Abruzzo Region Cartographic Service) into different landscape permeability values (Table S1), relying on species expert knowledge (Boitani et al. 2002, 2004; Roscioni et al. 2014). The reclassified land use/land cover map was then rasterized at a 40-m spatial resolution.
The roadkill risk model
The roadkill risk model was calibrated following an ensemble forecasting procedure similar to the one previously used for HSM. We considered the maps derived from HSM and LCM as biological predictors. Moreover, since badger has been shown to avoid both traveled roads and urban settlements (Revilla et al. 2001; Frantz et al. 2010; Spinozzi et al. 2012), as well as suffer high road mortality along minor and isolated roads (Clarke et al. 1998; Grilo et al. 2009; van Langevelde et al. 2009), we also included distance from urban areas and roads as factors potentially affecting the roadkill risk for this species. Accordingly, we added the following predictors: the Euclidean distance from urban areas, the density of local roads, the density of regional roads, and the density of highways. The three road categories represent a proxy of road width and, consequently, of traffic volume: low traffic for local roads, medium traffic for regional roads, and high traffic for highways (Jaeger et al. 2005; D’Amico et al. 2015). Therefore, local roads were considered easier barriers to cross than regional roads and highways, and regional roads easier than highways. The density of each road category was calculated through a moving window in the ESRI ArcGIS® software package. We considered a window radius of 750 m, according to the average home range size of badgers (Balestrieri et al. 2016; Kauhala and Holmala 2011; Molina-Vacas et al. 2009; Gaughran et al. 2018). All the predictors were rasterized at a 40-m spatial resolution. We checked the absence of multicollinearity among the predictors by posing a variance inflation factor ≤ 5 (Zuur et al. 2010) and placed a set of 10,000 background points in the study area (Phillips et al. 2006; Barbet-Massin et al. 2012). We constrained the points to fall within a buffer of 750-m radius around the road network. All the modeling settings used for HSM remained unchanged (Fig. 3).

Variable importance
Results
Roadkill risk
The roadkill risk map predicted through our model is presented in Fig. 2. In general, higher values of risk are located in hillside areas and in valleys with large urban surfaces.
Global HSM and HSM at regional scale showed fair-to-good levels of predictive performance, with AUC values of 0.809 ± 0.005 and 0.752 ± 0.036, respectively, and TSS values of 0.532 ± 0.009 and 0.440 ± 0.064, respectively. Also RRM reached good predictive performance scores, showing an AUC of 0.804 ± 0.012 and a TSS of 0.554 ± 0.044. HSM at regional scale showed that most of the suitable areas for badgers occur along the foothills and the river valleys characterized by wooded and shrubby vegetation. LCM highlighted the intermontane areas and, to a lesser extent, the hilly areas to host several connectivity corridors for the species.
Focusing on our hypothesis, RRM variable importance showed that habitat suitability was less important than landscape connectivity in determining roadkill risk (0.11 vs 0.44, Fig. 3), while the density of regional roads was the most important predictor (0.48; Fig. 4). In particular, roadkill risk was positively related with habitat suitability up to a tipping point (ca. 95% roadkill probability) at low-medium suitability values. On the other hand, a bell-shaped relationship emerged between roadkill risk and landscape connectivity, with a peak (95% roadkill probability) in correspondence of intermediate connectivity values (Fig. 3). As regards the other predictors, roadkill risk was directly related to regional and local road densities, while exhibiting poor or no relationship with the distance from urban areas and the density of highways.

Response curves describing the shape of the relationship between roadkill risk (y-axis) and values of the explanatory variables (x-axis). Each curve represents one variable
Discussion
We showed that both habitat suitability and landscape connectivity represent relevant factors in determining the roadkill risk for a habitat-generalist species like the Eurasian badger. Specifically, apart from the evidence that the density of regional roads was the most important predictor of risk, our results confirmed our initial hypothesis that landscape connectivity was more important than habitat suitability in determining the badger roadkill risk at a regional scale. Overall, the present study points out the often neglected relevance of landscape connectivity in roadkill studies, with significant implications in the planning of mitigation measures.
The relevance of landscape connectivity in determining roadkill risk was also highlighted by Grilo et al. (2011), Santos et al. (2013), and Kang et al. (2016). However, some of these studies considered landscape connectivity as a direct consequence of habitat suitability (i.e., the distance between suitable patches of habitat for given species; Grilo et al. 2011; Kang et al. 2016) and were therefore unable to disentangle the role of habitat suitability from landscape connectivity. The only study, to our knowledge, considering at the same time habitat suitability and landscape connectivity in a roadkill risk analysis was carried out in France on the roe deer Capreolus capreolus, leading to opposite conclusions to our findings (Girardet et al. 2015). Such study, indeed, showed that habitat suitability was more important than landscape connectivity in determining the roadkill risk of this species (Girardet et al. 2015). However, such study was carried out in a rural landscape characterized by forest patches in a meadow/plantation matrix (Girardet et al. 2015). In such context, forest patches represent an essential habitat for the roe deer, and for this reason, habitat availability was more important than landscape connectivity in determining roadkill hotspots (Girardet et al. 2015). Our approach, focusing on a habitat-generalist species, confirmed an expectable, although partial, importance of habitat suitability in determining roadkill risk, and above all a more considerable relevance of landscape connectivity. Such findings are providing novel points of view in a long-standing debate in road-mortality studies, highlighting that landscape connectivity should be seriously accounted for when the target species is a habitat-generalist species not so dependent on the suitability of a given habitat. In fact, habitat-generalist species, such as the Eurasian badger in Italy, are widespread in a variety of environments (Prigioni and Deflorian 2005; Prigioni et al. 2008; Balestrieri et al. 2009; Biancardi et al. 2014; Chiatante et al. 2017), and their roadkill risk is likely more linked to dispersal across the landscape rather than to territorial use of more suitable habitat patches, just as observed in other Mediterranean countries (Grilo et al. 2009). However, the availability of density estimates for badgers would represent a useful source of information to further support this hypothesis.
Interpreting the roadkill risk curves can help to further explore the actual influence of habitat suitability and landscape connectivity on casualty hazard. Although we focused on a habitat-generalist species, its roadkill risk increased according to the increase of habitat suitability, just as previously described in road-mortality literature in many species (e.g., Roger et al. 2012; D’Amico et al. 2015; Visintin et al. 2016), even in studies taking into account landscape connectivity (Grilo et al. 2011; Santos et al. 2013; Kang et al. 2016). Nevertheless, this roadkill risk curve decreased in correspondence with the highest habitat suitability. This could confirm the highest risk related to exploratory behavior across less suitable habitats (Grilo et al. 2009). Roadkill risk was also highest at intermediate values of landscape connectivity and negligible at both lowest and highest values. These findings confirm that low landscape connectivity impedes individual movement across the environmental matrix (Taylor et al. 1993). Nevertheless, these patterns might depend on the context where they were investigated, due to the high number of factors usually involved in determining habitat suitability and landscape connectivity. Overall, the areas with the highest roadkill risk for the habitat-generalist Eurasian badger were characterized by intermediate values of both habitat suitability and (especially) landscape connectivity. Such areas are especially suitable for dispersing individuals, which are usually described as the most susceptible to roadkill risk (Grilo et al. 2009).
Road-related variables also played a relevant role in determining roadkill risk, as previously showed by the available literature, including the studies considering habitat suitability and landscape connectivity (i.e., road sinuosity in Grilo et al. 2011; a generic roadkill index in Santos et al. 2013; road width and sinuosity and also distance from a crossing structure in Girardet et al. 2015; road length and slope and also traffic volume in Kang et al. 2016). In our case study, the most important road-related variable, slightly more relevant than landscape connectivity, was the density of regional roads. Such roads were the medium-sized infrastructures in our road network, entailing intermediate levels of traffic volume and allowed vehicle speed. These findings agree with the available road-mortality literature on Eurasian badgers, confirming that this species tends to avoid major roads and can suffer high roadkill rates in correspondence with minor and isolated roads (Clarke et al. 1998; Grilo et al. 2009; van Langevelde et al. 2009).
Although the scale of our approach makes it difficult to plan small-scale mitigation measures (e.g., where to exactly build a wildlife road-crossing structure), the present study provides a useful example pointing out the importance of planning mitigation measures not only according to the habitat suitability of target species, but also where landscape connectivity promotes individual movements, especially for habitat-generalist species. This approach allows to identify the road sections with high roadkill risk at a regional scale, claiming further finer scale efforts to plan efficient mitigation measures.
The identification of landscape connectivity as a main factor in determining the roadkill risk of habitat-generalist species at a regional scale provides a decisive contribution to a long-standing debate in road-mortality studies. Therefore, we can state now that landscape connectivity should be surely taken into account for the planning of mitigation measures aimed to preserve species, especially the habitat-generalist ones, and to ensure driver safety.
References
Allouche O, Tsoar A, Kadmon R (2006) Assessing the accuracy of species distribution models: prevalence, kappa and the true skill statistic (TSS). J Appl Ecol 43:1223–1232
Anderson MG, Clark M, Sheldon AO (2014) Estimating climate resilience for conservation across geophysical settings. Conserv Biol 28:959–970
Balestrieri A, Remonti L, Prigioni C (2009) Habitat selection in a low-density badger Meles meles population: a comparison of radio-tracking and latrine surveys. Wildl Biol 15:442–448
Balestrieri A, Cardarelli E, Pandini M, Remonti L, Saino N, Prigioni C (2016) Spatial organisation of European badger (Meles meles) in northern Italy as assessed by camera-trapping. Eur J Wildl Res 62
Barbet-Massin M, Thuiller W, Jiguet F (2010) How much do we overestimate future local extinction rates when restricting the range of occurrence data in climate suitability models? Ecography 33:878–886
Barbet-Massin M, Jiguet F, Albert CH, Thuiller W (2012) Selecting pseudo-absences for species distribution models: how, where and how many? Methods Ecol Evol 3:327–338
Biancardi C, Rigo V, Azzolini S, Gnoli C (2014) Eurasian badger (Meles meles) habitat and sett site selection in the northern Apennines. Nat Hist Sci 1:41–48
Boitani L, Falcucci A, Maiorano L, Montemaggiori A (2002) Rete Ecologica Nazionale: il Ruolo delle Aree Protette nella Conservazione dei Vertebrati. Dip. B.A.U. Università di Roma “La Sapienza”, Dir. Conservazione della Natura - Ministero dell’Ambiente e della Tutela del Territorio, Istituto di Ecologia Applicata, Roma
Boitani L., Lovari S., Vigna Taglianti A. (2004) Fauna d’Italia. Mammalia III. Carnivora – Artiodactyla. Edizioni Calderini, Bologna
Boitani L, Maiorano L, Baisero D, Falcucci A, Visconti P, Rondinini C (2011) What spatial data do we need to develop global mammal conservation strategies? Philos Trans R Soc Lond Ser B Biol Sci 366:2623–2632
Borda-de-Agua L, Grilo C, Pereira HM (2014) Modeling the impact of road mortality on barn owl (Tyto alba) populations using age-structured models. Ecol Model 276:29–37
Chiatante G, Dondina O, Lucchelli M, Bani L, Meriggi A (2017) Habitat selection of European badger Meles meles in a highly fragmented forest landscape in northern Italy: the importance of hedgerows and agro-forestry systems. Hystrix 28:247–252
Clarke GP, White PC, Harris S (1998) Effects of roads on badger Meles meles populations in south-west England. Biol Conserv 86:117–124
Coffin AW (2007) From roadkill to road ecology: a review of the ecological effects of roads. J Transp Geogr 15:396–406
Conover MR, Pitt WC, Kessler KK, DuBow TJ, Sanborn WA (1995) Review of human injuries, illnesses, and economic losses caused by wildlife in the United States. Wildl Soc Bull 23:407–414
D’Amico M, Román J, de los Reyes L, Revilla E (2015) Vertebrate road-kill patterns in Mediterranean habitats: who, when and where. Biol Conserv 191:234–242
D’Amico M, Ascensão F, Fabrizio M, Barrientos R, Gortázar C (2018) Twenty years of road ecology: a topical collection looking forward for new perspectives. Eur J Wildl Res 64
De Marinis M, Genovesi P, Spagnesi M (2002) Tasso Meles meles (Linnaeus, 1758). In: Spagnesi M, De Marinis M (eds) Mammiferi d’Italia. Quaderni di Conservazione della Natura
Di Febbraro M, Roscioni F, Frate L, Carranza ML, De Lisio L, De Rosa D, Marchetti M, Loy A (2015) Long-term effects of traditional and conservation-oriented forest management on the distribution of vertebrates in Mediterranean forests: a hierarchical hybrid modelling approach. Divers Distrib 21:1141–1154
Di Febbraro M., Martinoli A., Russo D., Preatoni D., Bertolino S. (2016) Modelling the effects of climate change on the risk of invasion by alien squirrels. Hystrix online ver, pp 1–8
Dondina O, Orioli V, Chiatante G, Meriggi A, Bani L (2018) Species specialization limits movement ability and shapes ecological networks: the case study of 2 forest mammals. Curr Zool 71:442–448
Fahrig L, Pedlar JH, Pope SE, Taylor PD, Wegner JF (1995) Effect of road traffic on amphibian density. Biol Conserv 73:177–182
Forman RTT, Alexander LE (1998) Roads and their major ecological effects. Annu Rev Ecol Syst 29:207–231
Forman RTT, Sperling D, Bissonette JA, Clevenger AP, Cutshall CD, Dale VH, Fahrig L, France R, Goldman CR, Heanue K, Jones JA, Swanson FJ, Turrentine T, Winter TC (2003) Road ecology. Science and Solutions. Island Press, Washington, D.C.
Frantz AC, Pope LC, Etherington TR, Wilson GJ, Burke T (2010) Using isolation-by-distance-based approaches to assess the barrier effect of linear landscape elements on badger (Meles meles) dispersal. Mol Ecol 19:1663–1674
Gallien L, Douzet R, Pratte S, Zimmermann NE, Thuiller W (2012) Invasive species distribution models - how violating the equilibrium assumption can create new insights. Glob Ecol Biogeogr 21:1126–1136
Gaughran A, Kelly DJ, MacWhite T, Mullen E, Maher P, Good M, Marples NM (2018) Super-ranging. A new ranging strategy in European badgers. PLoS One 13:e0191818
Girardet X, Conruyt-Rogeon G, Foltête J-C (2015) Does regional landscape connectivity influence the location of roe deer roadkill hotspots? Eur J Wildl Res 61:731–742
González-Gallina A, Benítez-Badillo G, Rojas-Soto OR, Hidalgo-Mihart MG (2013) The small, the forgotten and the dead: highway impact on vertebrates and its implications for mitigation strategies. Biodivers Conserv 22:325–342
Grilo C, Bissonette J, Santos-Reis M (2009) Spatial-temporal patterns in Mediterranean carnivore road casualties: consequences for mitigation. Biol Conserv 142:301–313
Grilo C, Ascensão F, Santos-Reis M, Bissonette JA (2011) Do well-connected landscapes promote road-related mortality? Eur J Wildl Res 57:707–716
Guisan A, Petitpierre B, Broennimann O, Daehler C, Kueffer C (2014) Unifying niche shift studies: insights from biological invasions. Trends Ecol Evol 29:1–10
Hanley JA, McNeil BJ (1982) The meaning and use of the area under a receiver operating characteristic (ROC) curve. Radiology 143:29–36
Ibisch PL, Hoffmann MT, Kreft S, Pe’er G, Kati V, Biber-Freudenberger L, Della Sala DA, Vale MM, Hobson PR, Selva N (2016) A global map of roadless areas and their conservation status. Science 354:1423–1427
Jaarsma R, van Langevelde F, Bavecoc JM, van Eupenc M, Ariszb J (2007) Model for rural transportation planning considering simulating mobility and traffic kills in the badger Meles meles. Ecol Inf 2:73–82
Jaeger JAG, Bowman J, Brennan J, Fahrig L, Bert D, Bouchard J, Charbonneau N, Frank K, Grube B, von Toschanowitz KT (2005) Predicting when animal populations are at risk from roads: an interactive model of road avoidance behavior. Ecol Model 185:329–348
Kang W, Minor ES, Woo D, Lee D, Park C-R (2016) Forest mammal roadkills as related to habitat connectivity in protected areas. Biodivers Conserv 25:2673–2686
Kauhala K, Holmala K (2011) Landscape features, home-range size and density of northern badgers (Meles meles). Ann Zool Fenn 48:221–232 Retrieved from http://www.jstor.org/stable/23737082
Koen EL, Bowman J, Sadowski C, Walpole AA (2014) Landscape connectivity for wildlife: development and validation of multispecies linkage maps. Methods Ecol Evol 5:626–633
Kranz A., Abramov A.V., Herrero J., Maran T. (2016) Meles meles. The IUCN Red List of Threatened Species 2016: e.T29673A45203002
Kruuk H (1989) The social badger: ecology and behaviour of a group-living carnivore (Meles meles). Oxford University Press, Oxford
Landis JR, Koch GG (1977) The measurement of observer agreement for categorical data. Biometrics 33:159–174
Litvaitis JA, Tash JP (2008) An approach toward understanding wildlife-vehicle collisions. Environ Manag 42:688–697
Lomba A, Pellissier L, Randin C, Vicente J, Moreira F, Honrado J, Guisan A (2010) Overcoming the rare species modelling paradox: a novel hierarchical framework applied to an Iberian endemic plant. Biol Conserv 143:2647–2657
Marmion M, Parviainen M, Luoto M, Heikkinen RK, Thuiller W (2009) Evaluation of consensus methods in predictive species distribution modelling. Divers Distrib 15:59–69
Mateo-Sánchez MC, Gastón A, Ciudad C et al (2015) Seasonal and temporal changes in species use of the landscape: how do they impact the inferences from multi-scale habitat modeling? Landsc Ecol 31:1261
McClure ML, Hansen AJ, Inman RM (2016) Connecting models to movements: testing connectivity model predictions against empirical migration and dispersal data. Landsc Ecol 31:1419–1432
McRae BH, Dickson BG, Keitt TH, Shah VB (2008) Using circuit theory to model connectivity in ecology, evolution, and conservation. Ecology 89:2712–2724
Molina-Vacas G, Bonet-Arbolí V, Rafart-Plaza E, Rodríguez-Teijeiro JD (2009) Spatial ecology of the European badgers (Meles meles) in Mediterranean habitats of the north-eastern Iberian Peninsula. I: home range size, spatial distribution and social organization. Vie et Milieu — Life Environment 59:223–232
Mumme RL, Schoech SJ, Woolfenden GE, Fitzpatrick JW (2000) Life and death in the fast lane: demographic consequences of road mortality in the Florida scrub-jay. Conserv Biol 14:501–512
Newton-Cross G, White PCL, Harris S (2007) Modelling the distribution of badgers Meles meles: comparing predictions from field-based and remotely derived habitat data. Mammal Rev 37:54–70
Pearson RG, Dawson T, Liu C (2004) Modelling species distributions in Britain: a hierarchical integration of climate and land-cover data. Ecography 3:285–298
Pelletier D, Clark M, Anderson MG, Rayfield B, Wulder MA, Cardille JA (2014) Applying circuit theory for corridor expansion and management at regional scales: tiling, pinch points, and omnidirectional connectivity. PLoS One 9:e84135
Phillips SJ, Anderson RP, Schapire RE (2006) Maximum entropy modeling of species geographic distributions. Ecol Model 190:231–259
Prigioni C, Deflorian MC (2005) Sett site selection by the Eurasian badger (Meles meles) in an Italian Alpine area. Ital J Zool 72:43–48
Prigioni C, Balestrieri A, Remonti L, Cavada L (2008) Differential use of food and habitat by sympatric carnivores in the eastern Italian Alps. Ital J Zool 75:173–184
Raes N (2012) Partial versus full species distribution models. Nat Conserv 10:127–138
Ramesh V, Gopalakrishna T, Barve S, Melnick DJ (2017) Citizen science driven species distribution models estimate drastically smaller range sizes and higher threat levels for Western Ghats endemic birds. Biol Conserv 210:205–221
Reed GC, Litvaitis JA, Callahan C, Carroll RP, Litvaitis MK, Broman DJA (2017) Modeling landscape connectivity for bobcats using expert-opinion and empirically derived models: how well do they work? Anim Conserv 20:308–320
Requena-Mullor JM, López E, Castro AJ, Cabello J, Virgós E, González-Miras E, Castro H (2014) Modeling spatial distribution of European badger in arid landscapes: an ecosystem functioning approach. Landsc Ecol 29:843–855
Requena-Mullor JM, López E, Castro AJ, Alcaraz-Segura D, Castro H, Reyes A, Cabello J (2017) Remote-sensing based approach to forecast habitat quality under climate change scenarios. PloS One
Revilla E, Palomares F, Delibes M (2001) Edge-core effects and the effectiveness of traditional reserves in conservation: Eurasian badgers in Doñana National Park. Conserv Biol 15:148–158
Roger E, Bino G, Ramp D (2012) Linking habitat suitability and road mortalities across geographic ranges. Landsc Ecol 27:1167–1181
Rondinini C, Battistoni A, Peronace V, Teofili C (2013) Meles meles. Lista Rossa IUCN dei Vertebrati Italiani. Comitato Italiano IUCN e Ministero dell’Ambiente e della Tutela del Territorio e del Mare, Roma
Roscioni F, Rebelo H, Russo D, Carranza ML, Di Febbraro M, Loy A (2014) A modelling approach to infer the effects of wind farms on landscape connectivity for bats. Landsc Ecol 29(5):891–903
Sala OE, Stuart Chapin IIIF, Armesto JJ, Berlow E, Bloomfield J, Dirzo R, Huber-Sanwald E, Huenneke LF, Jackson RB, Kinzig A, Leemans R, Lodge DM, Mooney HA, Oesterheld M, Poff NLR, Sykes MT, Walker BH, Walker M, Wall DH (2000) Global biodiversity scenarios for the year 2100. Science 287:1770–1774
Sanderson EW, Jaiteh M, Levy MA, Redford KH, Wannebo AV, Woolmer G (2002) The human footprint and the last of the wild. Bioscience 52:891–904
Santos S. M., Lourenço R., Mira A., Beja P. (2013). Relative effects of road risk, habitat suitability, and connectivity on wildlife roadkills: the case of tawny owls Strix aluco. PLOS ONE 8 [online]
Santos MJ, Rosalino LM, Santos-Reis M, Ustin SL (2016) Testing remotely-sensed predictors of meso-carnivore habitat use in Mediterranean ecosystems. Landsc Ecol 31:1763–1780
Seiler A (2005) Predicting locations of moose-vehicle collisions in Sweden. J Appl Ecol 42:371–382
Seiler A, Helldin JO, Seiler C (2004) Road mortality in Swedish mammals: results of a drivers’ questionnaire. Wildl Biol 10:225–233
Sinclair ARE, Byrom AE (2006) Understanding ecosystem dynamics for conservation of biota. J Anim Ecol 75:64–79
Spinozzi F, Battisti C, Bologna MA (2012) Habitat fragmentation sensitivity in mammals: a target selection for landscape planning comparing two different approaches (bibliographic review and expert based). Rend Fis Acc Lincei 23:365–373
Swets JA (1988) Measuring the accuracy of diagnostic systems. Science 240:1285–1293
Taylor PD, Fahrig L, Henein K, Merriam G (1993) Connectivity is a vital element of landscape structure. Oikos 68:571–573
Thuiller W, Lafourcade B, Engler R, Araújo MB (2009) BIOMOD - a platform for ensemble forecasting of species distribution. Ecography 32:369–373
Tiago P, Pereira HM, Capiñha C (2017) Using citizen science data to estimate climatic niches and species distributions. Basic Appl Ecol 20:75–85
van der Ree R, Smith DJ, Grilo C (2015) Handbook of road ecology. John Wiley & Sons, Oxford
van Langevelde F, van Dooremalen C, Jaarsma CF (2009) Traffic mortality and the role of minor roads. J Environ Manag 90:660–667
van Strien AJ, van Swaay CAM, Termaat T (2013) Opportunistic citizen science data of animal species produce reliable estimates of distribution trends if analysed with occupancy models. J Appl Ecol 50:1450–1458
Virgós E, Revilla E, Mangas JC, Roura D (2005) Ecología y conservación del tejón en ecosistemas mediterráneos. Sociedad Española para la Conservación y Estudio de los Mamíferos SECEM
Visintin C, van der Ree R, McCarthy MA (2016) A simple framework for a complex problem? Predicting wildlife-vehicle collisions. Ecol Evol 6:6409–6421
Wilson MFJ, O’Connell B, Brown C, Guinan JC, Grehan AJ (2007) Multiscale terrain analysis of multibeam bathymetry data for habitat mapping on the continental slope. Mar Geod 30:3–35
Zuur AF, Ieno EN, Elphick CS (2010) A protocol for data exploration to avoid common statistical problems. Methods Ecol Evol 1:3–14
Acknowledgements
We thank Majella National Park, Monte Genzana Alto Gizio Nature Reserve, Zompo Lo Schioppo Nature Reserve, Calanchi di Atri Nature Reserve, Castel Cerreto Nature Reserve, Cascate del Verde Nature Reserve, and Centro Studi per le Reti Ecologiche for providing the data. We also thank two anonymous reviewers whose comments and suggestions remarkably improved the first draft of the manuscript.
Funding
MD was supported by a REN Biodiversity Chair postdoctoral grant by REN (Redes Energéticas Nacionais) and FCT (Fundação para a Ciência e a Tecnologia) and a Juan de la Cierva—Formación postdoctoral grant by MINECO (Ministerio de Economía y Empresa).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article is part of the Topical Collection on Road Ecology
Guest Editor: Marcello D’Amico
Rights and permissions
About this article

Cite this article
Fabrizio, M., Di Febbraro, M., D’Amico, M. et al. Habitat suitability vs landscape connectivity determining roadkill risk at a regional scale: a case study on European badger (Meles meles). Eur J Wildl Res 65, 7 (2019). https://doi.org/10.1007/s10344-018-1241-7
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10344-018-1241-7