
Abstract
In this paper we extend the Banach spaces-based fully mixed approach recently developed for the coupled Stokes and Poisson–Nernst–Planck equations, to cover the coupled Navier–Stokes and Poisson–Nernst–Planck equations. In addition to the velocity and pressure of the fluid, the velocity gradient and the Bernoulli-type stress tensor are added as further unknowns. Similarly, fully mixed formulations for the Poisson and Nernst–Planck sub-problems are achieved by considering, alongside the electrostatic potential and the concentration of ionized particles, the electric current field and total ionic fluxes as new mixed variables. As a consequence, two saddle-point problems, one of them non-linear, and both involving nonlinear source terms depending on the other unknowns, along with a perturbed saddle-point problem that is in turn further perturbed by a bilinear form depending on the remaining unknowns, constitute the resulting variational formulation of the whole coupled system. Fixed-point strategies are then employed to prove, under smallness assumptions on the data, the well-posedness of the continuous and associated Galerkin schemes, the latter for arbitrary finite element subspaces under suitable stability assumptions. The main theoretical tools utilized include the Babuška–Brezzi and Banach–Nečas–Babuška theories in Banach spaces, an abstract result for perturbed saddle-point problems (also in Banach spaces), and the classical Banach and Brouwer fixed-point theorems. Strang-type lemmas are then applied to establish a priori error estimates. Next, specific finite element subspaces (defined by Raviart–Thomas elements of order \(k\ge 0\) and piecewise polynomials of degree \(\le k\)) are shown to satisfy the required hypotheses, and this yields specific convergence rates. Finally, several numerical results are reported, confirming the theoretical findings and illustrating the good performance of the method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Scope In this paper we develop a Banach spaces-based formulation yielding a new mixed finite element method for the coupled Navier–Stokes and Poisson–Nernst–Planck equations. This coupled PDE system is a remarkable example of multiphysics models where electrically charged ions interact in a complex manner, and at different spatial scales, with the flow behaviour of incompressible viscous fluid. Fluid mixtures of this type are essential in modeling fuel cells, ion channel behavior in cell membranes of biological tissues, electrodialysis and similar mechanisms used in the process of water desalination, and many other instances.
These models for single-phase electrohydrodynamic flows are composed by the coupled system of fluid flow (for example, the Navier–Stokes equations), ion transport (the Nernst–Planck equations with advection) and electrostatics (here a generalized Poisson equation). Obtaining accurate and stable numerical solutions for these complex systems is key to produce reliable simulations. While the computation with high-order methods and other schemes has been studied thoroughly in the literature going back several decades, the rigorous theoretical analysis of finite element and similar methods for the system under consideration here, initiated in the classical work [25], where the authors establish convergence of a finite element method using a projection method à la Chorin–Temam. Subsequently, a number of discretization methods have been proposed and their numerical analysis (discrete solvability, stability, convergence) has been conducted, including primal [22,23,24], primal-mixed (meaning in our context that the equations of Poisson–Nernst–Planck are written in mixed form but the incompressible flow problem is in classical velocity–pressure formulation) [19, 20], discontinuous Galerkin, and virtual elements [14].
One of our goals is to include conservativity of momentum for each one of the equations involved. A way of doing this is to use fully mixed formulations, that is, solving also for other unknowns of interest such as pseudostress-type tensors, vorticity, fluxes, and so on. Using numerical methods based on fully mixed variational formulations enjoys many advantages. However, in such a case, regularity issues may appear in treating the convective and advective terms as well as in the other coupling mechanisms. Remedies exist, for example augmentation (adding redundant Galerkin residual terms to endow the final formulation with the necessary regularity to control nonlinearities in usual Hilbert spaces). While this approach allows us to treat the convective and advective nonlinearities, it fails in maintaining the key feature of local conservativity (of momentum and mass, for example). Relatively recent efforts have been done in designing an alternative approach, where one looks at the fully mixed forms of the underlying problem without augmenting them. In turn, one requires to work on a more general functional setting, for example on Banach spaces. This is a classic idea going back to the work [3], which has got fresh attention due to the possibility of writing more and more complex nonlinearly coupled multiphysics problems in mixed form. As a non-exhaustive list of contributions taking advantage of the use of Banach frameworks for solving the aforementioned kind of problems, we refer to [2, 4, 6,7,8, 10, 11, 17, 18, 21].
Using these arguments, in [13] the authors have recently introduced a Banach spaces-based mixed finite element method for a slightly simpler model: the coupled Stokes and Poisson–Nernst–Planck equations. Even if the underlying model difference is just the presence of the convective term, we note that the structure of a fully mixed form for the Navier–Stokes equations requires a different setup—for example, employing different mixed variables sought in different spaces than those used for Stokes flows in fully mixed form. Moreover, the results in this paper extend further the analysis carried out in [13] by utilizing a different fixed-point strategy.
Outline The rest of the manuscript is organized as follows. Notations and basic definitions to be utilized throughout the paper are collected in the remainder of this section. Section 2 states the strong form of the coupled problem, in its usual primal form, and also defining the new mixed variables. The fully-mixed continuous formulation is defined in Sect. 3, and its well-posedness analysis is developed in Sect. 4. The Galerkin method is introduced and analyzed in Sect. 5 under suitable assumptions on the finite element subspaces employed. In addition to its unique solvability, a generic error estimate is also provided there. Next, Sect. 6 specifies finite element subspaces satisfying the required stability properties, states the expected orders of convergence, and describes the discrete conservation properties of the resulting method. Finally, Sect. 7 showcases a number of numerical examples which serve as computational confirmation of the theoretical convergence rates computed in appropriate weighted norms, as well as of the discrete conservativity, and other tests that exemplify the use of the proposed family of fully mixed methods in the simulation of ionized electrolyte flows.
Preliminary definitions and notational conventions Throughout the paper, \(\Omega \) is a bounded Lipschitz-continuous domain of \(\mathrm R^n\), \(\,n\in \big \{2,3\big \}\), with polygonal (resp. polyhedral) boundary \(\Gamma \) in \(\mathrm R^2\) (resp. \(\mathrm R^3\)), and whose outward unit normal at \(\Gamma :=\partial \Omega \) is denoted by \({\varvec{\nu }}\). Standard notation will be adopted for Lebesgue spaces \(\mathrm L^t(\Omega )\) and Sobolev spaces \(\mathrm W^{l,t}(\Omega )\) and \(\mathrm W_0^{l,t}(\Omega )\), with \(l\ge 0\) and \(t\in [1,+\infty )\), whose norms, either for the scalar and vectorial case, are denoted by \(\Vert \cdot \Vert _{0,t;\Omega }\) and \(\Vert \cdot \Vert _{l,t;\Omega }\), respectively. Note that \(\mathrm W^{0,t}(\Omega ) = \mathrm L^t(\Omega )\), and if \(t=2\) we write \(\mathrm H^l(\Omega )\) instead of \(\mathrm W^{l,2}(\Omega )\), with norm and seminorm denoted by \(\Vert \cdot \Vert _{l,\Omega }\) and \(|\cdot |_{l,\Omega }\), respectively. In addition, letting \(t, \, t' \in (1,+\infty )\) conjugate to each other, that is such that \(1/t+1/t'=1\), we denote by \(\mathrm W^{1/t',t}(\Gamma )\) the trace space of \(\mathrm W^{1,t}(\Omega )\), and let \(\mathrm W^{-1/t',t'}(\Gamma )\) be the dual of \(\mathrm W^{1/t',t}(\Gamma )\) endowed with the norms \(\Vert \cdot \Vert _{-1/t',t';\Gamma }\) and \(\Vert \cdot \Vert _{1/t',t;\Gamma }\), respectively. On the other hand, given any generic scalar functional space \(\mathrm M\), we let \({\textbf{M}}\) and \({\mathbb {M}}\) be the corresponding vectorial and tensorial counterparts, whereas \(\Vert \cdot \Vert \) will be employed for the norm of any element or operator whenever there is no confusion about the spaces to which they belong. Furthermore, as usual, \({\mathbb {I}}\) stands for the identity tensor in \({\mathbb {R}}:= \mathrm R^{n\times n}\), and \(|\cdot |\) denotes the Euclidean norm in \({\textbf{R}}:= \mathrm R^n\). Also, for any vector field \({\textbf{v}}=(v_i)_{i=1,n}\) we set the gradient and divergence operators, respectively, as
Additionally, for any tensor fields \({\varvec{\tau }}= (\tau _{ij})_{i,j=1,n}\) and \({\varvec{\zeta }}= (\zeta _{ij})_{i,j=1,n}\), we let \(\textbf{div}({\varvec{\tau }})\) be the divergence operator \(\textrm{div}\) acting along the rows of \({\varvec{\tau }}\), and define the transpose, the trace, the tensor inner product operators, and the deviatoric tensor, respectively, as
On the other hand, given \(t \in (1,+\infty )\), we also introduce the Banach spaces
which are endowed with the natural norms defined, respectively, by
Then, proceeding as in [16, eq. (1.43), Section 1.3.4] (see also [5, Section 4.1] and [10, Section 3.1]), it is easy to show that for each \(t \,\ge \, \frac{2n}{n+2}\) there holds
where \(\langle \cdot ,\cdot \rangle \) is the duality pairing between \({\mathrm H}^{-1/2}(\Gamma )\) and \({\mathrm H}^{1/2}(\Gamma )\), as well as between \({{\textbf{H}}}^{-1/2}(\Gamma )\) and \({{\textbf{H}}}^{1/2}(\Gamma )\). Furthermore, given \(t, \, t' \in (1,+\infty )\) conjugate to each other, there also holds (cf. [15, Corollary B. 57])
where \(\langle \cdot ,\cdot \rangle _\Gamma \) stands for the duality pairing between \({\mathrm W}^{-1/t,t}(\Gamma )\) and \({\mathrm W}^{1/t,t'}(\Gamma )\).
2 The model problem
We consider the electrohydrostatic model describing the flow of a Newtonian and incompressible fluid occupying the domain \(\Omega \), and whose mathematical representation is given by the coupled Navier–Stokes and Poisson–Nernst–Planck equations. Its behavior is determined by the concentrations \(\xi _1\) and \(\xi _2\) of ionized particles, and by the electric current field \(\varvec{\varphi }\). More precisely, and regarding firstly the fluid, we look for the velocity \({\textbf{u}}\) and the pressure p such that \(({\textbf{u}},p)\) is solution to the Navier–Stokes equations
where \(\mu \) is the constant dynamic viscosity, \(\omega \) is the fluid density, \(\varepsilon \) is the dielectric coefficient, also known as the electric conductivity coefficient, \({\textbf{f}}\) is a source term, \({\textbf{g}}\) is the Dirichlet datum for \({\textbf{u}}\) on \(\Gamma \), and the null mean value of p has been incorporated as a uniqueness condition for this unknown. Note that, due to the incompressibility of the fluid (cf. second equation of (2.1)), \({\textbf{g}}\) must satisfy the compatibility condition
Furthermore, \(\varvec{\varphi }\), \(\xi _1\) and \(\xi _2\) solve the Poisson–Nernst–Planck equations, given by
where \(\chi \) is the electrostatic potential, and for each \(i\in \big \{1,2\big \}\)
where \(\kappa _1\) and \(\kappa _2\) are the diffusion coefficients, \(q_i:= \left\{ \begin{array}{rl} 1 &{} \hbox {if } i=1 \\ -1 &{} \hbox {if }i=2 \end{array} \right. \) is the charge of each particle, f, \(f_1\), and \(f_2\) are external forces, and g, \(g_1\) and \(g_2\) are Dirichlet data for \(\chi \), \(\xi _1\) and \(\xi _2\), respectively, on \(\Gamma \). We end the description of the model by remarking that \(\varepsilon \), \(\kappa _1\), and \(\kappa _2\) are all assumed to be bounded above and below, which means that there exist positive constants \(\varepsilon _0\), \(\varepsilon _1\), \({\underline{\kappa }}\), and \({\bar{\kappa }}\), such that
Since we are interested in employing a fully-mixed variational formulation for the coupled model (2.1)–(2.4), we first adopt the approach from [11] (see also [10]) for the fluid and introduce the velocity gradient and the Bernoulli-type stress tensor as further unknowns, that is
In this way, noting that \(\textbf{div}({\textbf{u}}\otimes {\textbf{u}}) = (\nabla {\textbf{u}}){\textbf{u}}= {{\textbf{t}}}{\textbf{u}}\), which follows from the fact that \(\textrm{div}({\textbf{u}}) \,=\, 0\), we find that the first equation of (2.1) can be rewritten as
Next, taking matrix trace and the deviatoric part of the second equation of (2.6), we find that the latter and the incompressibility condition, which becomes now \({\textrm{tr}}({{\textbf{t}}}) = 0\), are equivalent to the pair
whence the pressure can be eliminated from the formulation and computed afterwards in terms of \({\varvec{\sigma }}\) and \({\textbf{u}}\) as indicated in the second column of (2.7).
On the other hand, for the Nernst–Planck equations we introduce for each \(i \in \big \{1,2\big \}\) the total fluxes
so that the respective transport equation reads now \( \xi _i \,-\, \textrm{div}({\varvec{\sigma }_i}) \,=\, f_i {\quad \hbox {in}\quad }\Omega \,. \) Consequently, (2.1)–(2.4) can then be rewritten in terms of \({{\textbf{t}}}\), \({\varvec{\sigma }}\), \({\textbf{u}}\), \(\varvec{\varphi }\), \(\chi \), \({\varvec{\sigma }}_i\) and \(\xi _i\), \(i \in \big \{1,2\big \}\), as
And we note that the uniqueness condition for p rewrites equivalently as the null mean value constraint for \({\textrm{tr}}\big ({\varvec{\sigma }}\,+\,\frac{\omega }{2}({\textbf{u}}\otimes {\textbf{u}})\big )\).
3 The fully-mixed formulation
In this section we derive a Banach spaces-based fully-mixed formulation of (2.8). We use the integration by parts formulae (1.3a)–(1.4) along with the Cauchy–Schwarz and Hölder inequalities. We split the exposition into a preliminary discussion on functional spaces, then present each sub-problem separately, and finally state the variational formulation of the whole coupled system (2.8).
3.1 Preliminaries
We begin by determining suitable spaces where to seek the unknowns by taking a closer look at the terms \(\,\frac{\omega }{2}\,{{\textbf{t}}}{\textbf{u}}\), \(\,\frac{\omega }{2}({\textbf{u}}\otimes {\textbf{u}})\), \(\,(\xi _1 -\xi _2) \,\varepsilon ^{-1} \varvec{\varphi }\), \(\,q_i \, \xi _i \, \varepsilon ^{-1} \varvec{\varphi }\) and \(\,\kappa _i^{-1} \, \xi _i \, {\textbf{u}}\) in the second and sixth rows of (2.8). To be more precise, ignoring the bounded functions \(\varepsilon ^{-1}\), and \(\kappa _i^{-1}\), as well as the constant \(q_i\), an immediate application of the Cauchy–Schwarz and Hölder inequalities, yields
where \(\ell , \, j \in (1,+\infty )\) are conjugate to each other; and \({\textbf{v}}\), \({\textbf{s}}\), and \({\varvec{\tau }}_i\) are test functions associated to \({\textbf{u}}\), \({{\textbf{t}}}\), and \({\varvec{\sigma }}_i\), respectively. In this way, denoting
it follows that the above expressions make sense for \(\xi _i \in {\mathrm L}^{\rho }(\Omega )\), \(\varvec{\varphi }\in {{\textbf{L}}}^r(\Omega )\), \( {\textbf{u}}, \,{\textbf{v}}\in {{\textbf{L}}}^{4} (\Omega ) \), \( {{\textbf{t}}}, {\textbf{s}}\in {{\mathbb {L}}}^2(\Omega )\), and \({\varvec{\tau }}_i \in {{\textbf{L}}}^2(\Omega )\). Since we need that \({\textbf{u}}\in {{\textbf{L}}}^4(\Omega )\), we impose that \(2j \le 4\). The specific choice of \(\ell \) (and hence of j, \(\rho \), r and the respective conjugates \(\varrho \) and s) will be addressed later on. In the meantime we consider generic values in (3.2). Moreover, since \(\varvec{\varphi }\in {{\textbf{L}}}^r(\Omega )\), from the first equation in the fourth row of (2.8), we deduce that \(\chi \) should be initially sought in \({\mathrm W}^{1,r}(\Omega )\).
3.2 The Navier–Stokes equations
The analysis of the mixed formulation for the Navier–Stokes equations is inspired by the work done by [6, Section 2.1]. As they do, we first assume that \({\textbf{g}}\in {{\textbf{H}}}^{1/2}(\Gamma )\). Then, by a direct application of (1.3b) with \(t\,\ge \,\frac{2n}{n+2}\) and \({\varvec{\tau }}\in {{\mathbb {H}}}(\textbf{div}_t;\Omega )\), we test the first equation of (2.8) obtaining
It is easy to notice that, thanks to Cauchy–Schwarz’s inequality and the free trace property of \({{\textbf{t}}}\), the first term of (3.3) makes sense for \({{\textbf{t}}}\in {{\mathbb {L}}}_{{\textrm{tr}}}^2(\Omega )\), where
In turn, knowing that \(\textbf{div}({\varvec{\tau }})\in {{\textbf{L}}}^{t}(\Omega )\), and using Hölder’s inequality, we deduce from the second term of (3.3) that, we look for \({\textbf{u}}\in {{\textbf{L}}}^{t'}(\Omega )\), where \(t'\) is the conjugate of t. On the other hand, testing the first equation of the second row of (2.8) against tensors in \({{\mathbb {L}}}^2(\Omega )\), and recalling the orthogonal splitting \(\,{\mathbb {L}}^2(\Omega ) \,=\, \mathbb L^2_{\textrm{tr}}(\Omega ) \,\oplus \,{\mathrm R}\,{\mathbb {I}}\), we get
from where, by the Cauchy–Schwarz and Hölder inequalities, we deduce that the third term makes sense for \({\textbf{u}}\in {{\textbf{L}}}^{4}(\Omega )\) setting \(t'=4\) and therefore \(t= 4/3\). Furthermore, aiming to use the same space of \({\varvec{\tau }}\), then we seek \({\varvec{\sigma }}\in {{\mathbb {H}}}(\textbf{div}_{4/3};\Omega )\) as well. On the other hand, as we know that \(\textbf{div}({\varvec{\sigma }})\in {{\textbf{L}}}^{4/3}(\Omega )\), we test the second equation of the second row of (2.8) against vector functions in \({{\textbf{L}}}^4(\Omega )\), which yields
Notice from the above deduction and the already established spaces for \({{\textbf{t}}}\), \({\textbf{u}}\) and \({\textbf{v}}\), that the first, second and fourth terms of (3.5) are well-defined, the latter if the datum \({\textbf{f}}\) belongs to \({{\textbf{L}}}^{4/3}(\Omega )\), which is henceforth assumed. As for the third, which will depend on where to look \(\xi :=\,(\xi _1\) , \(\xi _1)\) and \({\varvec{\varphi }}\), we will refer to it later. We now consider the decomposition
where
implying that \({\varvec{\sigma }}\) can be uniquely decomposed (also using the second equation of the third row of (2.8)), as \({\varvec{\sigma }}\, = \, {\varvec{\sigma }}_0 + c_0{{\mathbb {I}}}\), where
Thus, similarly to the case of the pressure, the constant \(c_0\) can be computed once the velocity is known, and hence it only remains to obtain \({\varvec{\sigma }}_0\). In this regard, we notice that (3.4) and (3.5) do not change if \({\varvec{\sigma }}\) is replaced by \({\varvec{\sigma }}_0\). In turn, as \({{\textbf{t}}}\) is sought in \({{\mathbb {L}}}^2_{{\textrm{tr}}}(\Omega )\), and using the compatibility condition (2.2), we realize that testing (3.3) against \({\varvec{\tau }}\in {{\mathbb {H}}}(\textbf{div}_{4/3};\Omega )\) is equivalent to doing it against \({\varvec{\tau }}\in {{\mathbb {H}}}_0(\textbf{div}_{4/3};\Omega )\). Therefore, taking into account the above discussion, and introducing the notations
we redenote from now on \({\varvec{\sigma }}_0\) as simply \({\varvec{\sigma }}\in {{\textbf{Q}}}\). Then, from the expressions (3.3), (3.4) and (3.5), we state the following mixed formulation for the Navier–Stokes equations: Find \((\mathbf {{\textbf{u}}}, {\varvec{\sigma }})\in {{\textbf{H}}}\times {{\textbf{Q}}}\) such that
where, given \({\textbf{z}}\in {{\textbf{L}}}^4(\Omega )\), the bilinear forms \({{\textbf{a}}}: {{\textbf{H}}}\times {{\textbf{H}}}\rightarrow {\mathrm R}\), \({{\textbf{b}}}: {{\textbf{H}}}\times {{\textbf{Q}}}\rightarrow {\mathrm R}\), and \({{\textbf{c}}}({\textbf{z}};\cdot ,\cdot ): {{\textbf{H}}}\times {{\textbf{H}}}\rightarrow {\mathrm R}\), are defined as
and
whereas, given \(\varvec{\eta }\,:=\, (\eta _1,\,\eta _2 ) \) and \({\varvec{\phi }}\) in the same spaces where \({\varvec{\xi }}\) and \({\varvec{\varphi }}\) will be sought respectively, the linear functionals \({{\textbf{F}}}_{\varvec{\eta },\varvec{\phi }}:\,{{\textbf{H}}}\,\rightarrow \, {\mathrm R}\) and \({{\textbf{G}}}\,:\, {{\textbf{Q}}}\,\rightarrow \, {\mathrm R}\) are given by
and
In turn, it is easy to see that \({{\textbf{a}}}\), \({{\textbf{b}}}\), \({{\textbf{c}}}({\textbf{z}},\cdot ,\cdot )\), and \({{\textbf{G}}}\) are bounded. In fact, using the norms
applying the Cauchy–Schwarz and Hölder inequalities, and using (1.3b) with \({\textbf{v}}_{\textbf{g}}\in {{\textbf{H}}}^1(\Omega )\) such that \({\textbf{v}}_{\textbf{g}}|_\Gamma = {\textbf{g}}\) and \(\Vert {\textbf{v}}_{\textbf{g}}\Vert _{1,\Omega } = \Vert {\textbf{g}}\Vert _{1/2,\Gamma }\), along with the continuous injection \({\textbf{i}}_4:{{\textbf{H}}}^1(\Omega )\rightarrow {{\textbf{L}}}^4(\Omega )\), we find that there exist positive constants, denoted and given as
such that
and
Furthermore, simple algebraic calculations show that
3.3 The electrostatic potential equations
The derivation of the mixed formulation for the electrostatic potential equations (fourth and fifth rows of (2.8)) has been presented in [13, Section 3.3]. It reads: Find \(({\varvec{\varphi }},\chi )\in {\mathrm X}_2\,\times \, {\mathrm M}_1\) such that
where
and the bilinear forms \(a: {\mathrm X}_2 \times {\mathrm X}_1 \rightarrow \mathrm R\) and \(b_i: {\mathrm X}_i \times {\mathrm M}_i \rightarrow \mathrm R\), \(i \in \big \{1,2\big \}\), and the functional \({\mathrm F}: {\mathrm X}_1 \rightarrow \mathrm R\), are defined, respectively, as
whereas, given \({\varvec{\eta }}:= (\eta _1,\eta _2) \in {{\textbf{L}}}^\rho (\Omega )\), the functional \({\mathrm G}_{\varvec{\eta }}: {\mathrm M}_2 \rightarrow \mathrm R\) is defined by
Note from (3.1a)–(3.1e) that \(\eta _1\) and \(\eta _2\) must belong to \({\mathrm L}^{\rho }(\Omega )\). Also, in order for the first term on the right-hand side of (3.21) to make sense, we require that \(\rho \ge r \).
For the boundedness of a, \(b_i\), \(i\in \big \{1,2\big \}\), \({\mathrm F}\), and \({\mathrm G}_{{\varvec{\eta }}}\), we recall that the norm of \({\mathrm X}_1\) and \({\mathrm X}_2\) are defined by (1.2c) with \(t\,=\, s\) and \(t\,=\, r\), respectively, whereas those of \({\mathrm M}_1\) and \({\mathrm M}_2\) are given by \(\Vert \cdot \Vert _{0,r;\Omega }\) and \(\Vert \cdot \Vert _{0,s;\Omega }\), respectively. Then, employing again the Cauchy–Schwarz and Hölder inequalities, bounding \(\varepsilon ^{-1}\) according to (2.5), and using that \(\Vert \cdot \Vert _{0,r;\Omega }\le |\Omega |^{(\rho -r)/\rho r}\,\Vert \cdot \Vert _{0,\rho ;\Omega }\), which follows from the fact that \(\rho \ge r\), we find that there exist positive constants
such that
Regarding the boundedness of \({\mathrm F}\), we need to apply [15, Lemma A.36], which, along with the surjectivity of the trace operator mapping \({\mathrm W}^{1,r}(\Omega )\) onto \({\mathrm W}^{1/s,r}(\Gamma )\), yields the existence of a fixed constant \(C_r > 0\), such that for the given \(g\in {\mathrm W}^{1/s,r}(\Gamma )\), there exists \(v_g\in {\mathrm W}^{1,r}(\Omega )\) satisfying \(v_g|_{\Gamma }\,=\, g\) and \(\Vert v_g\Vert _{1,r;\Omega } \,\le \,C_r\,\Vert g\Vert _{1/s,r;\Gamma }\). In this way, employing now (1.4), we obtain
We stress that the above derivation is analogous to the one for the boundedness of \({{\textbf{G}}}\) (cf. (3.14)). However, note that, though similar, two different integration by parts formulae, namely (1.3b) and (1.4), are employed, and that the final estimates yielding \(\Vert {\textbf{g}}\Vert _{1/2,\Gamma }\) and \(\Vert g\Vert _{1/s,r;\Gamma }\) are obtained by an equality and an inequality, respectively.
3.4 The ionized particles concentration equations
The following mixed variational formulation for the ionized particles concentration equations has been proposed in [13, Section 3.4]: Find \(({\varvec{\sigma }}_i,\xi _i)\in {\mathrm H}_i\times {\mathrm Q}_i\) such that
where
and the bilinear forms \(a_i:{\mathrm H}_i\times {\mathrm H}_i\rightarrow {\mathrm R}\), \(c_i: {\mathrm H}_i\times {\mathrm Q}_i\rightarrow {\mathrm R}\), and \(d_i:{\mathrm Q}_i\times {\mathrm Q}_i\rightarrow {\mathrm R}\), and the functionals \({\mathrm F}_i:{\mathrm H}_i\rightarrow R\) and \({\mathrm G}_i:{\mathrm Q}_i\rightarrow {\mathrm R}\), are defined, respectively, as
whereas, given \(({\varvec{\phi }},{\textbf{v}})\in {\mathrm X}_2\times {{\textbf{L}}}^4(\Omega )\), the bilinear form \(c_{{\varvec{\phi }},{\textbf{v}}}:{\mathrm H}_i\times {\mathrm Q}_i\rightarrow {\mathrm R}\) is set as
It is concluded that \(a_i\), \(c_i\), \(d_i\), \({\mathrm F}_i\), \(G_i\) and \(c_{{\varvec{\phi }},{\textbf{v}}}\) are all bounded with the norm defined by (1.2a) with \(t\,=\, \varrho \) for \({\mathrm H}_i\), and certainly the norm \(\Vert \cdot \Vert _{0,\rho ;\Omega }\) for \({\mathrm Q}_i\). Indeed, applying the Cauchy–Schwarz and Hölder inequalities, bounding both \(\varepsilon ^{-1}\) and \(\kappa ^{-1}\) according to (2.5), noting that \(\Vert \cdot \Vert _{0,\Omega }\,\le \,|\Omega |^{(\rho -2)/2\rho }\Vert \cdot \Vert _{0,\rho ;\Omega }\), invoking the identity (1.3a) and the continuous injection \(i_{\rho }:{\mathrm H}^1(\Omega )\rightarrow {\mathrm L}^{\rho }(\Omega )\), similarly as for the boundedness of \({{\textbf{G}}}\) (cf. (3.14)), and utilizing (3.1d) and (3.1e), we find that there exist positive constants
such that
In the rest of the paper will be used indistinctly either \(\Vert {\varvec{\eta }}\Vert _{{\mathrm Q}_1\times {\mathrm Q}_2}\) or \(\Vert {\varvec{\eta }}\Vert _{0,\rho ;\Omega }\), where
3.5 The whole coupled formulation
Summarizing the discussion from the previous sections, and putting together (3.9), (3.17), and (3.23), we find that, under the assumptions that \({\textbf{f}}\in {{\textbf{L}}}^{4/3}(\Omega )\), \({\textbf{g}}\in {{\textbf{H}}}^{1/2}(\Gamma )\), \(f\in {\mathrm L}^r(\Omega )\), \(g\in {\mathrm W}^{1/s,r}(\Gamma )\), \(f_i\in {\mathrm L}^{\varrho }(\Omega )\), \(g_i\in {\mathrm H}^{1/2}(\Gamma )\), and \(\rho \,\ge \, r\), the variational formulation of (2.8) reduces to: Find \((\mathbf {{\textbf{u}}},{\varvec{\sigma }})\in {{\textbf{H}}}\times {{\textbf{Q}}}\), \(({\varvec{\varphi }},\chi )\in {\mathrm X}_2\times {\mathrm M}_1\), and \(({\varvec{\sigma }}_i,\xi _i)\in {\mathrm H}_i\times {\mathrm Q}_i\), \(i\,\in \,\left\{ 1,2\right\} \), such that
We stress here that the feasible ranges for the indexes \(\ell \), j, \(\rho \), \(\varrho \), r, and s, are specified below in (4.8).
4 The continuous solvability analysis
In this section we proceed similarly to how it was done in [10] and [17] (see also [2, 5, 6, 13, 18], and some of the references therein) and adopt a fixed-point strategy to analyze the solvability of (3.26)
4.1 The fixed-point approach
We begin by rewriting (3.26) as an equivalent fixed-point equation, for which we first introduce the operator \( {\textbf{S}}: {{\textbf{L}}}^{4}(\Omega )\times ({\mathrm Q}_1\times {\mathrm Q}_2)\times {\mathrm X}_2\,\rightarrow \, {{\textbf{L}}}^{4}(\Omega )\) defined by
where \((\mathbf {{\textbf{u}}},{\varvec{\sigma }})\,=\, (({\textbf{u}},{{\textbf{t}}}),{\varvec{\sigma }})\in {{\textbf{H}}}\times {{\textbf{Q}}}\) is the unique solution (conditions for its existence are to be derived below) of the problem (3.9) (equivalently, the first and second rows of (3.26)) when \({{\textbf{c}}}({\textbf{u}},\cdot ,\cdot )\) and \({{\textbf{F}}}_{{\varvec{\xi }},{\varvec{\varphi }}}\) are replaced by \({{\textbf{c}}}({\textbf{z}},\cdot ,\cdot )\) and \({{\textbf{F}}}_{{\varvec{\eta }},{\varvec{\phi }}}\), respectively, that is
In turn, we also introduce the operator \({\bar{{\mathrm T}}}:{\mathrm Q}_1\times {\mathrm Q}_2\,\rightarrow \,{\mathrm X}_2\) defined as
where \(({\varvec{\varphi }},\chi )\in {\mathrm X}_2\times {\mathrm M}_1\) is the unique solution (to be confirmed below) of problem (3.17) (equivalently, the third and fourth rows of (3.26)) with \({\varvec{\eta }}\) instead of \({\varvec{\xi }}\)
Similarly, for each \(i\in \left\{ 1,2\right\} \), we define the operator \({\widetilde{{\mathrm T}}}_i:{\mathrm X}_2\times {{\textbf{L}}}^{4}(\Omega )\,\rightarrow \, {\mathrm Q}_i\) as
where \(({\varvec{\sigma }}_i,\xi _i)\in {\mathrm H}_i\times {\mathrm Q}_i\) is the unique solution (to be confirmed below) of problem (3.23) (equivalently, the fifth and sixth rows of (3.26)) with \(({\varvec{\phi }},{\textbf{v}})\) instead \(({\varvec{\varphi }},{\textbf{u}})\), that is
so that we can define the operator \({\widetilde{{\mathrm T}}}:{\mathrm X}_2\times {{\textbf{L}}}^{4}(\Omega )\,\rightarrow \, ({\mathrm Q}_1\times {\mathrm Q}_2)\) as
Finally, defining the operator \({{\textbf{T}}}:{\mathrm X}_2\times {{\textbf{L}}}^4(\Omega )\,\rightarrow \, {\mathrm X}_2\times {{\textbf{L}}}^4(\Omega )\) as
we observe that solving (3.26) is equivalent to seeking a fixed point of \({{\textbf{T}}}\), that is: Find \(({\varvec{\varphi }},{\textbf{u}})\in {\mathrm X}_2\times {{\textbf{L}}}^4(\Omega )\) such that
4.2 Well-posedness of the uncoupled problems
In this section we show that the problems (4.1), (4.2) and (4.3) are well-posed; and therefore the respective operators \({\textbf{S}}\), \(\bar{{\mathrm T}}\), and \(\widetilde{{\mathrm T}}_i\) are well-defined. To that end, we will employ the Babuška–Brezzi theory in Banach spaces for the general case (cf. [3, Theorem 2.1, Corollary 2.1, Section 2.1], and for a particular one [15, Theorem 2.34]), as well as a recently established result for perturbed saddle point formulations in Banach spaces (cf. [12, Theorem 3.4]) along with the Banach–Nečas–Babuška Theorem (also known as the generalized Lax–Milgram Lemma) (cf. [15, Theorem 2.6]).
To prove that, given an arbitrary \(({\textbf{z}},{\varvec{\eta }},{\varvec{\phi }})\in {{\textbf{L}}}^4(\Omega )\times ({\mathrm Q}_1\times {\mathrm Q}_2)\times {\mathrm X}_2\), (4.1) is well-posed, equivalently that \({\textbf{S}}\) is well-defined, we cite the work done in [6, Section 3.2.1] and the references therein. It has to be emphasized that \(\varvec{\alpha }\) will denote the \({\textbf{V}}-\)ellipticity constant of \({{\textbf{a}}}\), \(\varvec{\beta }\) is the constant of the inf-sup condition of \({{\textbf{b}}}\) and \({\textbf{i}}_{4}\) denotes the continuous injection of \({{\textbf{H}}}^1(\Omega )\) into \({{\textbf{L}}}^4(\Omega )\) (for more details see [6, Section 3.2.1]). In turn, they proved the following lemma.
Lemma 4.1
For each \(({\textbf{z}},{\varvec{\eta }},{\varvec{\phi }})\in {{\textbf{L}}}^4(\Omega )\times ({\mathrm Q}_1\times {\mathrm Q}_2)\times {\mathrm X}_2\) there exists a unique \((\mathbf {{\textbf{u}}},{\varvec{\sigma }})\,=\, (({\textbf{u}},{{\textbf{t}}}),{\varvec{\sigma }})\in {{\textbf{H}}}\times {{\textbf{Q}}}\) solution of (4.1), and hence one can define \({\textbf{S}}({\textbf{z}},{\varvec{\eta }},{\varvec{\phi }}):=\,{\textbf{u}}\in {{\textbf{L}}}^4(\Omega )\). Moreover, there exists a positive constant \(C_{{\textbf{S}}}\), depending only on \(|\Omega |\), \(\Vert {\textbf{i}}_4\Vert \), \(\mu \), \(\omega \), \(\varvec{\alpha }\) and \(\varvec{\beta }\), such that
Proof
The proof is analogous to that of [6, Lemma 3.1]. \(\square \)
Furthermore, proceeding similarly to the derivation of (4.6) (see [6, Lemma 3.1]), we get
where \({\bar{C}}_{{\textbf{S}}}\) is a positive constant depending, as well, on \(|\Omega |\), \(\mathbf {i_4}\), \(\mu \), \(\omega \), \(\varvec{\alpha }\), and \(\varvec{\beta }\).
In order to prove that, given an arbitrary \({\varvec{\eta }}\in {\mathrm Q}_1\times {\mathrm Q}_2\), problem (4.2) is well-posed (and, equivalently, that \(\bar{{\mathrm T}}\) is well-defined), we take inspiration from the work done in [13, Section 4.2.2] and the references therein. It should be noted that throughout the analysis performed in [13, Section 4.2.2] for the well-definedness of \({\bar{{\mathrm T}}}\), suitable ranges were specified for the index of each space (cf. [13, Lemma 4.4]), in particular for \(\ell \) and, consequently, for \(j,r,s,\rho \), and \(\varrho \). In our case, we have that \(2j\,\le \,4\). Therefore, these ranges do not change, and the appropriate ranges needed for the analysis will be as follows
On the other hand, as a consequence of [13, Lemmas 4.3 and 4.4] and the boundedness stated in (3.22), we are able to conclude that the operator \(\bar{{\mathrm T}}\) is well-defined. More precisely, we denote by \(\bar{\alpha }\) and \(\bar{\beta }_i\) the inf-sup constants for the bilinear forms a and \(b_i\), \(i\in \{1,2\}\), respectively (cf. [13, Lemmas 4.3 and 4.4, respectively]), and state the following result from [13, Theorem 4.5].
Theorem 4.2
For each \({\varvec{\eta }}\in {\mathrm Q}_1\times {\mathrm Q}_2\) there exists a unique \(({\varvec{\varphi }},\chi )\in {\mathrm X}_2\times {\mathrm M}_1\) solution to (4.2), and hence one can define \(\bar{{\mathrm T}}({\varvec{\eta }}):=\,{\varvec{\varphi }}\in {\mathrm X}_2\). Moreover, there exists a positive constant \(C_{\bar{{\mathrm T}}}\), depending only on, \(\varepsilon _0\), \(C_r\), \(|\Omega |\), \(\bar{\alpha }\), and \(\bar{\beta }_2\), such that
Employing [3, Corollary 2.1, Section 2.1, eq. (2.16)] we observe that the a priori bound for the \(\chi \) component of the unique solution to (4.2) reduces to
As in (4.9), the same inequality is obtained for (4.10), but with a different constant, in particular depending additionally on \(\bar{\beta }_1\). Therefore, as before, we still denote the largest of them by \(C_{\bar{{\mathrm T}}}\), and simply say that the right-hand side of (4.9) constitutes the a priori estimate for both \({\varvec{\varphi }}\) and \(\chi \).
Finally, in order to prove that, given an arbitrary \(({\varvec{\phi }},{\textbf{v}})\in {\mathrm X}_2\times {{\textbf{L}}}^4(\Omega )\), (4.3) is well-posed for each \(i\in \{1,2\}\), we observe first that the operator \(\widetilde{{\mathrm T}}\) is defined in the same way as in [13, Section 4.2.3].
Therefore we introduce the bilinear forms \({\varvec{\mathrm A}}\), \({\varvec{\mathrm A}}_{{\varvec{\phi }},{\textbf{v}}}: ({\mathrm H}_i\times {\mathrm Q}_i)\times ({\mathrm H}_i\times {\mathrm Q}_i)\rightarrow {\mathrm R}\) given by
for all \(({\varvec{\zeta }}_i,\vartheta _i)\), \(({\varvec{\tau }}_i,\eta _i)\in {\mathrm H}_i\times {\mathrm Q}_i\), so that (4.3) can be re-stated as: Find \(({\varvec{\sigma }}_i,\xi _i)\in {\mathrm H}_i\times {\mathrm Q}_i\) such that
Thus, the proof reduces to first showing that the bilinear forms that are part of \({\varvec{\mathrm A}}\) satisfy the hypotheses of [12, Theorem 3.4] and then combine the consequence of this result with the effect of the extra term given by \(c_{{\varvec{\phi }},{\textbf{v}}}(\cdot ,\cdot )\), to conclude that \({\varvec{\mathrm A}}_{{\varvec{\phi }},{\textbf{v}}}\) satisfies a global inf-sup condition. Indeed, it is clear from (3.25a), (3.25c) and the upper bound of \(\kappa _i\) (cf. (2.5)) that \(a_i\) and \(d_i\) are symmetric and positive semi-definite, which proves the assumption i) of [12, Theorem 3.4]. Next, taking into account the definitions of \(c_i\) (cf. (3.25b)) and the spaces \({\mathrm H}_i\) and \({\mathrm Q}_i\) (cf. (3.24)), and using that \({\mathrm L}^{\rho }(\Omega )\) is isomorphic to its dual \({\mathrm L}^{\varrho }(\Omega )\), we easily find that the null space \(\textrm{V}_i\) of the operator induced by \(c_i\) becomes
and thus
from which the hypothesis ii) of [12, Theorem 3.4], i.e., the continuous inf-sup condition \(a_i\), is clearly satisfied with constant \({\widetilde{\alpha }}:=\,{\bar{\kappa }}^{-1}\).
From what has been developed in [13, Section 4.2.3], we are in position to establish that, for each \(i\in \{1,2\}\), (4.3) is well-posed, which means, equivalently, that \(\widetilde{{\mathrm T}}_i\) is well-defined. Indeed, recalling that \(\widetilde{\varvec{\alpha }}_{{\varvec{\mathrm A}}}>0\) is the inf-sup constant of \({\varvec{\mathrm A}}\) (for more details, see [13, eq. (74), Section 4.2.3]), we proceed to state the following result [13, Theorem 4.6].
Theorem 4.3
For each \(i\in \{1,2\}\), and for each \(({\varvec{\phi }},{\textbf{v}})\in {\mathrm X}_2\times {{\textbf{L}}}^{4}(\Omega )\), such that there holds
there exists a unique \(({\varvec{\phi }}_i,\xi _i)\in {\mathrm H}_i\times {\mathrm Q}_i\) solution to (4.3), and hence one can define \(\widetilde{{\mathrm T}}_i({\varvec{\phi }},{\textbf{v}}):=\,\xi _i\in {\mathrm Q}_i\). Moreover, there exists a positive constant \(C_{\widetilde{{\mathrm T}}}\), depending only on \(\Vert i_{\rho }\Vert \) and \(\widetilde{\varvec{\alpha }}_{{\varvec{\mathrm A}}}\), such that
We end this section by observing from the definition of \(\widetilde{{\mathrm T}}\) (cf. (4.4)) and the priori estimates given by (4.15) for each \(i\in \{1,2\}\), that
for each \(({\varvec{\phi }},{\textbf{v}})\in {\mathrm X}_2\times {{\textbf{L}}}^{4}(\Omega )\) satisfying (4.14) .
4.3 Solvability analysis of the fixed-point scheme
Knowing that the operators \({\textbf{S}}\), \(\bar{{\mathrm T}}\), \(\widetilde{{\mathrm T}}\) and thus also \({{\textbf{T}}}\) are well defined for small data, we now address the solvability of the fixed-point equation (4.5) applying Banach’s Theorem. We first derive sufficient conditions under which \({{\textbf{T}}}\) maps the following closed ball (with radius to be specified later on) of \({\mathrm X}_2\times {{\textbf{L}}}^{4}(\Omega )\) into itself
Then, given \(({\varvec{\phi }},{\textbf{z}}) \in {\mathrm W}(\delta )\), we have from the definition of \({{\textbf{T}}}\) (cf. (4.5)) and the a priori estimate for \({\widetilde{{\mathrm T}}}\) (cf. (4.16)) that, under the assumption (cf. (4.14))
which suggests to define \(\delta :=\,\frac{\widetilde{\varvec{\alpha }}_{\varvec{\mathrm A}}}{2\,\Vert c\Vert }\), followed by an application of the a priori estimates for \({\textbf{S}}\) (cf. (4.6)), \({\bar{{\mathrm T}}}\) (cf. (4.9)) and \(\widetilde{{\mathrm T}}\) (cf. (4.16)), we deduce
where \(C_{{{\textbf{T}}}}\) is a positive constant depending only on \(C_{\textbf{S}}\), \(C_{{\bar{{\mathrm T}}}}\), \(C_{{\widetilde{{\mathrm T}}}}\), and \((1+\delta )\), and we also define
Therefore, we have proved the following lemma.
Lemma 4.4
Assume that the data are sufficiently small so that
Then, \({{\textbf{T}}}({\mathrm W}(\delta ))\subseteq {\mathrm W}(\delta )\).
We now aim to prove that the operator \({\textbf{T}}\) is Lipschitz-continuous, for which it suffices to show that \({\textbf{S}}\), \(\bar{{\mathrm T}}\), \(\widetilde{{\mathrm T}}_i\) (\(i=\{1,2\}\)) and \(\widetilde{{\mathrm T}}\) satisfy suitable continuity properties. We begin by studying \({\textbf{S}}\).
Lemma 4.5
There exists a positive constant \({\mathrm L}_S\), depending on \(\varvec{\alpha }\), \(\varepsilon \), \(|\Omega |\) and \( \Vert {{\textbf{c}}}\Vert \), such that
for all \(({\textbf{z}},\varvec{\eta },\varvec{\phi }),({\textbf{z}}_0,\varvec{\eta }_0,\varvec{\phi }_0) \in {{\textbf{L}}}^4(\Omega ) \times ({\mathrm Q}_1 \times {\mathrm Q}_2) \times {\mathrm X}_2\), where
Proof
Given \(({\textbf{z}},\varvec{\eta },\varvec{\phi }),({\textbf{z}}_0,{\varvec{\eta }}_0,\varvec{\phi }_0) \in {{\textbf{L}}}^4(\Omega ) \times ({\mathrm Q}_1 \times {\mathrm Q}_2) \times {\mathrm X}_2\), we let \({\textbf{S}}({\textbf{z}},\varvec{\eta },\varvec{\phi }):={\textbf{u}}\in {{\textbf{L}}}^4(\Omega )\) and \({\textbf{S}}({\textbf{z}}_0,{\varvec{\eta }}_0,{\varvec{\phi }}_0):={\textbf{u}}_0 \in {{\textbf{L}}}^4(\Omega )\), where \({\varvec{\eta }}_0:= (\eta _{0,1},\eta _{0,2})\); and \((\mathbf {{\textbf{u}}},\varvec{\sigma }) = ( ({\textbf{u}},{{\textbf{t}}}), \varvec{\sigma }) \in {{\textbf{H}}}\times {{\textbf{Q}}}\) and \((\mathbf {{\textbf{u}}}_0,\varvec{\sigma }_0) = ( ({\textbf{u}}_0,{{\textbf{t}}}_0), \varvec{\sigma }_0) \in {{\textbf{H}}}\times {{\textbf{Q}}}\) are the respective solutions to (4.1). It follows from the second equations of (4.1) that \(\mathbf {{\textbf{u}}}- \mathbf {{\textbf{u}}}_0 \in \varvec{{\mathrm V}}\) (where \(\varvec{{\mathrm V}}\) denotes the kernel of the operator induced by the bilinear form \({{\textbf{b}}}\) [6, cf. (3.11)]), and then \(\varvec{{\mathrm V}}\)-ellipticity of \({{\textbf{a}}}\) ( [6, cf. (3.12)]) gives
In turn, applying the first equations of (4.1) to \(\mathbf {{\textbf{v}}}= \mathbf {{\textbf{u}}}-\mathbf {{\textbf{u}}}_0\), we obtain
so that, subtracting (4.22b) from (4.22a), and using, thanks to the bilinearity of \({{\textbf{c}}}({\textbf{z}}; \cdot ,\cdot )\) and (3.16), that
we find
In turn, it is clear from (3.13) that subtracting and adding \({\varvec{\phi }}_0\) to the factor \({\varvec{\phi }}\) in the first term, we get
Then, bearing in mind the boundedness of \(\varepsilon \) by \(\varepsilon _0\) and by the fact that \(\Vert \cdot \Vert _{0,\Omega }\le |\Omega |^{1/4}\Vert \cdot \Vert _{0,4;\Omega }\), we obtain
while the boundedness property of \({{\textbf{c}}}\) (cf. (3.15)) results in
Finally, employing (4.24) and (4.25) in (4.23), by substituting the resulting estimate into (4.21), simplifying by \(\Vert \mathbf {{\textbf{u}}}-\mathbf {{\textbf{u}}}_0\Vert _{{{\textbf{H}}}}\) and bounding \(\Vert \mathbf {{\textbf{u}}}_0\Vert _{{{\textbf{H}}}}\) by the upper bound in (4.6), we arrive at the required inequality (4.19) with \({\mathrm L}_{{\textbf{S}}}:= \varvec{\alpha }^{-1}\max \big \{\varepsilon _0^{-1}|\Omega |^{1/4},\Vert c\Vert \big \}\). \(\square \)
The next result establishes the continuity of \({\bar{{\mathrm T}}}\), whose proof can be found in [13, Lemma 4.9].
Lemma 4.6
There exists a positive constant \({\mathrm L}_{{\bar{{\mathrm T}}}}\), depending only on \(|\Omega |\), \({\bar{\alpha }}\), \({\bar{\beta }}_2\), and \(\Vert a\Vert \), such that
In turn, the continuity of \(\widetilde{{\mathrm T}}\) is provided in [13, Lemma 4.10].
Lemma 4.7
There exists a positive constant \({\mathrm L}_{\widetilde{{\mathrm T}}}\), depending only on \(\varepsilon _0\), \(\underline{\kappa }\), \(\widetilde{\varvec{\alpha }}_{\varvec{\mathrm A}}\), and \(C_{{\widetilde{{\mathrm T}}}}\), such that
for all \(\,({\varvec{\phi }},{\textbf{v}}), \, ({\varvec{\phi }}_0,{\textbf{v}}_0) \in {\mathrm X}_2\times {{\textbf{L}}}^{4}(\Omega )\) satisfying (4.14).
Having proved Lemmas 4.5, 4.6, and 4.7, we now aim to derive the continuity of the fixed-point operator \({{\textbf{T}}}\). Given \(({\varvec{\phi }},{\textbf{z}}),({\varvec{\phi }}_0,{\textbf{z}}_0)\in {\mathrm W}(\delta )\) (cf. (4.17)), from the definition of \({{\textbf{T}}}\) (cf. (4.5)) we have that
Then, applying the continuity of \({\bar{{\mathrm T}}}\) (cf. Lemma 4.6, (4.26)) and \({\widetilde{{\mathrm T}}}\) (cf. Lemma 4.7, (4.27)), we get
where \({\mathrm L}_0\) is a positive constant depending only on \({\mathrm L}_{{\bar{{\mathrm T}}}}\) and \({\mathrm L}_{{\widetilde{{\mathrm T}}}}\). On the other hand, to bound the second term of (4.28), we apply the continuity of \({\textbf{S}}\) (cf. Lemma 4.5, (4.19)), in particular, setting \({\varvec{\eta }}\,=\, {\widetilde{{\mathrm T}}}({\varvec{\phi }},{\textbf{z}})\), \({\varvec{\eta }}_0\,=\,{\widetilde{{\mathrm T}}}({\varvec{\phi }}_0,{\textbf{z}}_0)\), \({\varvec{\phi }}\,=\,{\bar{{\mathrm T}}}({\widetilde{{\mathrm T}}}({\varvec{\phi }},{\textbf{z}}))\), and \({\varvec{\phi }}_0\,=\,{\bar{{\mathrm T}}}({\widetilde{{\mathrm T}}}({\varvec{\phi }}_0,{\textbf{z}}_0))\) in (4.19), followed by the continuity of \({\bar{{\mathrm T}}}\) (cf. Lemma 4.6, (4.26)) and \({\widetilde{{\mathrm T}}}\) (cf. Lemma 4.7, (4.27)), we deduce
where \(C_1\) is a positive constant depending only on \(C_{{\bar{{\mathrm T}}}}\), \(C_{{\widetilde{{\mathrm T}}}}\), \({\mathrm L}_{{\textbf{S}}}\), \({\mathrm L}_{{\bar{{\mathrm T}}}}\), and \({\mathrm L}_{{\widetilde{{\mathrm T}}}}\), and also where
In turn, applying the a priori estimates of \({\bar{{\mathrm T}}},{\widetilde{{\mathrm T}}}\) (cf. (4.9),(4.16)), and using that \(\Vert {\textbf{z}}_0\Vert _{0,4;\Omega }\,\le \,\delta \), we get
where \(C_{{\mathcal {F}}}>0\) is a constant depending only on \(C_{{\bar{{\mathrm T}}}}\), \(C_{{\widetilde{{\mathrm T}}}}\), and \(\delta \). Then, replacing the estimate of (4.31) into (4.30), we deduce the existence of a positive constant \(C_{2}\), depending only on \(C_1\) and \(C_{{\mathcal {F}}}\), such that
Finally, from what has been deduced in (4.29) and (4.32), by a straightforward application into (4.28), we arrive at
where \({\mathrm L}_{{{\textbf{T}}}}\) is a positive constant depending only on \(C_{{\bar{{\mathrm T}}}}\), \(C_{{\widetilde{{\mathrm T}}}}\), \({\mathrm L}_{{\textbf{S}}}\), \({\mathrm L}_{{\bar{{\mathrm T}}}}\), \({\mathrm L}_{{\widetilde{{\mathrm T}}}}\), and \(\delta \). Consequently, we are in a position to establish the main result of this section.
Theorem 4.8
In addition to the hypothesis (4.18) of Lemma 4.4, assume that
Then, the operator \({{\textbf{T}}}\) has a unique fixed point \(({\varvec{\varphi }},{\textbf{u}})\in {\mathrm W}(\delta )\). Equivalently, the coupled problem (3.26) has a unique solution \((\mathbf {{\textbf{u}}},{\varvec{\sigma }})\in {{\textbf{H}}}\times {{\textbf{Q}}}\), \(({\varvec{\varphi }},\chi )\in {\mathrm X}_2\times {\mathrm M}_1\), and \(({\varvec{\sigma }}_i,\xi _i)\in {\mathrm H}_i\times {\mathrm Q}_i\), \(i\,\in \,\left\{ 1,2\right\} \), with \(({\varvec{\varphi }},{\textbf{u}})\in {\mathrm W}(\delta )\). Moreover, there hold the following a priori estimates
where \(C_{\mathbf {{\textbf{u}}},{\varvec{\sigma }}}\) is a positive constant depending only on \(C_{{\textbf{S}}}\) and \(\delta \).
Proof
We first recall that the assumptions of Lemma 4.4 guarantee that \({{\textbf{T}}}\) maps \({\mathrm W}(\delta )\) into itself. Then, bearing in mind the Lipschitz-continuity of \({{\textbf{T}}}:{\mathrm W}(\delta )\rightarrow {\mathrm W}(\delta )\) (cf. (4.33)) and the assumption (4.34), a straightforward application of the classical Banach Theorem yields the existence of a unique fixed point \(({\varvec{\varphi }},{\textbf{u}})\in {\mathrm W}(\delta )\) of this operator, and hence a unique solution of (3.26). Finally, recalling that \(\Vert {\textbf{u}}\Vert _{0,4;\Omega }\,\le \,\delta \), it is easy to see that the a priori estimates provided by (4.6) (cf. Lemma 4.1), (4.9) (cf. Theorem 4.2), and (4.15) (cf. Theorem 4.3) yield (4.35) and finish the proof. \(\square \)
5 The Galerkin scheme
In this section we introduce the Galerkin scheme of the fully mixed variational formulation (3.26), analyze its solvability by applying a discrete version of the fixed-point approach adopted in Sect. 4.1, and subsequently derive its a priori error estimate.
5.1 Preliminaries
We first let \({{\textbf{H}}}^{{\textbf{u}}}_h\), \({{\mathbb {H}}}_h^{{{\textbf{t}}}}\), \({{\mathbb {H}}}_h^{{\varvec{\sigma }}}\), \({\mathrm X}_{i,h}\), \({\mathrm M}_{i,h}\), \({\mathrm H}_{i,h}\), and \({\mathrm Q}_{i,h}\), \(i\,\in \,\{1,2\}\), be a arbitrary finite element subspaces of the spaces \({{\textbf{L}}}^4(\Omega )\), \({{\mathbb {L}}}^2_{{\textrm{tr}}}(\Omega )\), \({{\mathbb {H}}}(\textbf{div}_{4/3};\Omega )\), \({\mathrm X}_i\), \({\mathrm M}_i\), \({\mathrm H}_i\), and \({\mathrm Q}_i\), \(i\,\in \,\{1,2\}\), respectively. Hereafter, h denotes both the sub-index of each subspace and the size of a regular triangulation \({\mathcal {T}}_h\) of \({\bar{\Omega }}\) made up of triangles K (when \(n\,=\,2\)) or tetrahedra K (when \(n\,=\,3\)) of diameter \(h_K\), so that \(h:=\,\max \big \{h_K:\,\quad K\,\in \,{\mathcal {T}}_h\big \}\). The explicit finite element subspaces satisfying the stability assumptions that will be introduced throughout the following analysis will be defined later in Sect. 6. Then, defining the spaces
and denoting \( \mathbf {{\textbf{u}}}_h\,:=\,({\textbf{u}}_h,{{\textbf{t}}}_h)\,,\ \mathbf {{\textbf{v}}}_h\,:=\,({\textbf{v}}_h,{\textbf{s}}_h)\in {{\textbf{H}}}_h\), the Galerkin scheme associated with (3.26) reads: Find \((\mathbf {{\textbf{u}}}_h,{\varvec{\sigma }}_h)\in {{\textbf{H}}}_h\times {{\textbf{Q}}}_h\), \(({\varvec{\varphi }}_h,\chi _h)\in {\mathrm X}_{2,h}\times {\mathrm M}_{1,h}\), and \(({\varvec{\sigma }}_{i,h}, \xi _{i,h})\in {\mathrm H}_{i,h}\times {\mathrm Q}_{i,h}\), \(i\in \{1,2\}\), such that
At this point we explicit a couple of identities contained in the above discrete formulation, which yield later on (cf. Section 6.4) the conservation properties of our Galerkin solution. Indeed, bearing in mind from Sects. 3.2, 3.3, and 3.4 the definitions of the bilinear forms and functionals involved, we notice that when taking \(\mathbf {{\textbf{v}}}_h:= ({\textbf{v}}_h, {\textbf{0}}) \in {{\textbf{H}}}_h\), the first equation of (5.1) becomes
In turn, the fourth and sixth equations of (5.1) reduce, respectively, to
and
Certainly, the respective continuous versions of (5.2), (5.3), and (5.4) are obtained from (3.26) by proceeding analogously.
Next, we adopt the discrete version of the strategy used in Sect. 4.1 to analyze the solvability of (5.1). Accordingly, we introduce the operator \({\textbf{S}}_h \,:\,{{\textbf{H}}}_h^{{\textbf{u}}}\times ({\mathrm Q}_{1,h}\times {\mathrm Q}_{2,h})\times {\mathrm X}_{2,h}\,\rightarrow \,{{\textbf{H}}}_h^{{\textbf{u}}}\) defined by
where \((\mathbf {{\textbf{u}}}_h,{\varvec{\sigma }}_h)\,=\, (({\textbf{u}}_h,{{\textbf{t}}}_h),{\varvec{\sigma }}_h)\in {{\textbf{H}}}_h\times {{\textbf{Q}}}_h\) is the unique solution (to be derived below under what conditions it does exist) of the first and second rows of (5.1) when \({{\textbf{c}}}({\textbf{u}}_h,\cdot ,\cdot )\) and \({{\textbf{F}}}_{{\varvec{\xi }}_h,{\varvec{\varphi }}_h}\) are replaced by \({{\textbf{c}}}({\textbf{z}}_h,\cdot ,\cdot )\) and \({{\textbf{F}}}_{{\varvec{\eta }}_h,{\varvec{\phi }}_h}\), respectively, that is
In turn, we also introduce the operator \({\bar{{\mathrm T}}}_h:{\mathrm Q}_{1,h}\times {\mathrm Q}_{2,h}\rightarrow {\mathrm X}_{2,h}\) defined as
where \(({\varvec{\varphi }}_h,\chi _h)\in {\mathrm X}_{2,h}\times {\mathrm M}_{1,h}\) is the unique solution (to be confirmed below) of the third and fourth rows of (5.1) with \({\varvec{\eta }}_h\) instead of \({\varvec{\xi }}_h\)
Similarly, for each \(i\in \left\{ 1,2\right\} \), we define the operator \({\widetilde{{\mathrm T}}}_{i,h}:{\mathrm X}_{2,h}\times {{\textbf{H}}}^{{\textbf{u}}}_h\,\rightarrow \, {\mathrm Q}_{i,h}\) as
where \(({\varvec{\sigma }}_{i,h},\xi _{i,h})\in {\mathrm H}_{i,h}\times {\mathrm Q}_{i,h}\) is the unique solution (to be confirmed below) of the fifth and sixth rows of (5.1) with \(({\varvec{\phi }}_h,{\textbf{v}}_h)\) instead \(({\varvec{\varphi }}_h,{\textbf{u}}_h)\), that is
so that we can define the operator \({\widetilde{{\mathrm T}}}_h:{\mathrm X}_{2,h}\times {{\textbf{H}}}^{{\textbf{u}}}_h\,\rightarrow \, ({\mathrm Q}_{1,h}\times {\mathrm Q}_{2,h})\) as
Finally, we define the discrete analogue of \({{\textbf{T}}}\) (cf. (4.5)), that is \({{\textbf{T}}}_h:{\mathrm X}_{2,h}\times {{\textbf{H}}}^{{\textbf{u}}}_h\,\rightarrow \,{\mathrm X}_{2,h}\times {{\textbf{H}}}^{{\textbf{u}}}_h\) as
so that solving (5.1) is equivalent to seeking a fixed point of \({{\textbf{T}}}_h\): Find \(({\varvec{\varphi }}_h,{\textbf{u}}_h)\in {\mathrm X}_{2,h}\times {{\textbf{H}}}_h^{{\textbf{u}}}\) such that
5.2 Discrete solvability analysis
In this section we proceed analogously to Sect. 4.2 and 4.3 and establish the well-posedness of the discrete system (5.1) by studying the solvability of the equivalent fixed-point equation (5.9). In this regard, we emphasize in advance that, the respective analysis being very similar to that developed in previous sections, we limit ourselves here to collecting the main results and providing selected details of their proofs.
Accordingly, we first prove that the discrete operators \(\textbf{S}_h\), \({\bar{{\mathrm T}}}_h\), and \(\widetilde{{\mathrm T}}_{i,h}\), \(i\in \{1,2\}\), and hence \({\widetilde{{\mathrm T}}}_h\) and \({{\textbf{T}}}_h\), are all well-defined, which reduces, equivalently, to showing that problems (5.5), (5.6), and (5.7) are well-posed. For this purpose, we now apply the discrete version of [3, Theorem 2.1, Corollary 2.1, Section 2.1], [15, Theorem 2.34], and [12, Theorem 3.4], which are given by [3, Corollary 2.2, Section 2.2], [15, Proposition 2.42], and [12, Theorem 3.5], respectively. More specifically, following a similar approach from, e.g. [6, Section 4.2] and [13, Section 5.2], our analysis is based on suitable hypotheses that must be satisfied by the finite element subspaces used in (5.1), which are divided according to the requirements of the associated decoupled problems. Explicit examples of discrete spaces verifying these hypotheses will be specified later in Sect. 6.
According to the above, and to address first the well-definedness of \({\textbf{S}}_h\), we assume that
(H.1) there exists a positive constant \(\varvec{\beta }_\texttt {d}\), independent of h, such that
In addition, we let \({\textbf{V}}_h\) be the discrete kernel of the bilinear form \({{\textbf{b}}}\), that is
and suppose
(H.2) there exists a positive constant \(C_\texttt{d}\), independent of h, such that
Then, given \({\textbf{z}}_h\in {{\textbf{H}}}_h^{{\textbf{u}}}\), it follows from the bilinear form \({\mathcal {A}}_{z_h}:{{\textbf{H}}}_h\times {{\textbf{H}}}_h\,\rightarrow \, {\mathrm R}\) defined by (cf. [6, eq. (3.9)], (3.18))
the identity (3.16), and the assumption (H.2), that
which proves the \({\textbf{V}}_h\)-ellipticity of \({\mathcal {A}}_{{\textbf{z}}_h}\) with constant \(\varvec{\alpha }_\texttt {d}\,:=\,\dfrac{\mu }{2}\,\min \{C_\texttt{d}, 1\}\). Thus, the discrete analogue of Lemma 4.1 is as follows.
Lemma 5.1
For each \(({\textbf{z}}_h,{\varvec{\eta }}_h,{\varvec{\phi }}_h)\in {{\textbf{H}}}_h^{{\textbf{u}}}\times ({\mathrm Q}_{1,h}\times {\mathrm Q}_{2,h})\times {\mathrm X}_{2,h}\), there exists a unique \((\mathbf {{\textbf{u}}}_h,{\varvec{\sigma }}_h)\,:=\,(({\textbf{u}}_h,{{\textbf{t}}}_h),{\varvec{\sigma }}_h)\in {{\textbf{H}}}_h\times {\mathrm Q}_h\) solution to (5.5), and hence one can define \({\textbf{S}}_h({\textbf{z}}_h,{\varvec{\eta }}_h,{\varvec{\phi }}_h)\,:=\,{\textbf{u}}_h\in {{\textbf{H}}}_h^{{\textbf{u}}}\). Moreover, there exists a positive constant \(C_{{\textbf{S}},\mathtt d}\), depending only on \(|\Omega |\), \(\Vert \textbf{i}_4\Vert \), \(\mu \), \(\varvec{\alpha }_\texttt {d}\), and \(\varvec{\beta }_\texttt {d}\), such that
Proof
The proof is analogous to that of [6, Lemma 4.1]. \(\square \)
Note here that the discrete analogue of (4.7) reads
where \({{\bar{C}}}_{{\textbf{S}}, \mathtt d}\) is a positive constant depending as well on \(|\Omega |\), \(\Vert {\textbf{i}}_4 \Vert \), \(\mu \), \(\omega \), \(\varvec{\alpha }_\texttt {d}\), and \(\varvec{\beta }_\texttt {d}\).
In turn, for the well-definedness of \({\bar{{\mathrm T}}}_h\), we need to introduce the discrete kernels of \(b_1\) and \(b_2\), namely
respectively, and adopt the following assumptions:
(H.3) there exists a positive constant \({\bar{\alpha }}_\texttt {d}\), independent of h, such that
(H.4) for each \(i\in \{1,2\}\) there exists a positive constant \({\bar{\beta }}_{i,\mathtt d}\) independent of h, such that
As a consequence of (H.3) and (H.4) we provide next the discrete version of Theorem 4.2.
Theorem 5.2
For each \({\varvec{\eta }}_h\in {\mathrm Q}_{1,h}\times {\mathrm Q}_{2,h}\) there exists a unique \(({\varvec{\varphi }}_h,\chi _h)\in {\mathrm X}_{2,h}\times {\mathrm M}_{1,h}\) solution to (5.6), and hence one can define \(\bar{{\mathrm T}}_h({\varvec{\eta }}_h):=\,{\varvec{\varphi }}_h\in {\mathrm X}_{2,h}\). Moreover, there exists a positive constant \(C_{\bar{{\mathrm T}},\mathtt d}\), depending only on, \(\varepsilon _0\), \(C_r\), \(|\Omega |\), \(\bar{\alpha }_\texttt {d}\), and \(\bar{\beta }_{2,\mathtt d}\) such that
Proof
See the proof of [13, Theorem 5.2]. \(\square \)
Analogous to what was explained for the continuous operator \(\bar{\mathrm T}\), here we can also assume that, except for a constant \(C_{\bar{\mathrm T},\mathtt d}\) depending additionally on \({\bar{\beta }}_{1,\mathtt d}\), the a priori estimate for \(\chi _{h}\), which is now deduced from [3, Corollary 2.2, eq. (2.25)], is also given by the right-hand side of (5.10).
It remains to prove the well-definedness of \({\widetilde{{\mathrm T}}}_h:=\,({\widetilde{{\mathrm T}}}_{1,h},{\widetilde{{\mathrm T}}}_{2,h})\), for which we first note that, being \(a_i\) and \(c_i\) symmetric and positive semi-definite in the whole spaces \({\mathrm H}_i\) and \({\mathrm Q}_i\), they certainly maintain their properties in \({\mathrm H}_{i,h}\) and \({\mathrm Q}_{i,h}\), respectively, so that the assumption i) of [12, Theorem 3.5] is clearly satisfied. Next, given \(i\in \{1,2\}\), we let \(\textrm{V}_{i,h}\) be the discrete kernel of \(c_i\), that is
and consider the hypotheses
(H.5) for each \(i\in \{1,2\}\) there holds \(\textrm{div}({\mathrm H}_{i,h})\subseteq {\mathrm Q}_{i,h}\), and
(H.6) there exists a positive constant \({\widetilde{\beta }}_\texttt {d}\,>\,0\), independent of h, such that
It follows from (5.11), the definition of \(c_i\) (cf. (3.25b)), and
(H.5) that
from which it is easy to notice that \(\textrm{V}_{i,h}\) is contained in the continuous kernel \(\textrm{V}_i\) (cf. (4.12)) of \(c_i\), giving rise to the discrete analogue of (4.13), that is
Thus, it follows from (5.12) that \(a_i\) satisfies the hypothesis ii) of [12, Theorem 3.5] with the constant \({\widetilde{\alpha }}_\texttt{d}\,:=\,{\bar{\kappa }}^{-1}\), whereas (H.6) itself constitutes assumption iii). Consequently, a direct application of [12, Theorem 3.5] implies the global discrete inf-sup condition for \({\varvec{\mathrm A}}\) (cf. (4.11a)) with a positive constant \(\widetilde{\varvec{\alpha }}_{{\varvec{\mathrm A}},\mathtt d}\) depending only on \(\Vert a_i\Vert \), \(\Vert c_i\Vert \), \({\widetilde{\alpha }}_\texttt {d}\), and \(\widetilde{\beta }_\texttt {d}\), and thus the same property is shared by \({\varvec{\mathrm A}}_{{\varvec{\phi }}_h,{\textbf{v}}_h}\) for each \(({\varvec{\phi }}_h,{\textbf{v}}_h)\in {\mathrm X}_{2,h}\times {{\textbf{H}}}_h^{{\textbf{u}}}\), satisfying the discrete version of (4.14), that is
We are now in position of establishing the well-definedness of \({\widetilde{{\mathrm T}}}_{i,h}\) for each \(i\in \{1,2\}\), for which we cite the following result from [13, Theorem 5.3].
Theorem 5.3
Given \(i\in \{1,2\}\) and \(({\varvec{\phi }}_h,{\textbf{v}}_h)\in {\mathrm X}_{2,h}\times {{\textbf{H}}}_h^{{\textbf{u}}}\) such that (5.13) holds, there exists a unique \(({\varvec{\sigma }}_{i,h},\xi _{i,h})\in {\mathrm H}_{i,h}\times {\mathrm Q}_{i,h}\) solution to (5.7), and hence one can define \({\widetilde{{\mathrm T}}}_{i,h}({\varvec{\phi }}_h,{\textbf{v}}_h)\,:=\,{\widetilde{\xi }}_{i,h}\in {\mathrm Q}_{i,h}\). Moreover, there exists a positive constant \(C_{{\widetilde{{\mathrm T}}},\mathtt d}\), depending only on \(\Vert \mathrm i_{\rho }\Vert \) and \(\widetilde{\varvec{\alpha }}_{{\varvec{\mathrm A}},\mathtt d}\), such that
Analogously to the continuous case, it follows from the definition of \(\widetilde{{\mathrm T}}_h\) (cf. (5.8)) and the a priori estimates given by (5.14) for each \(i\in \{1,2\}\), that
for each \(({\varvec{\phi }}_h,{\textbf{v}}_h)\in {\mathrm X}_{2,h}\times {{\textbf{H}}}_h^{{\textbf{u}}}\) satisfying (5.13).
Having established that the discrete operators \({\textbf{S}}_h\), \({\bar{{\mathrm T}}}_h\), \(\widetilde{{\mathrm T}}_h\), and hence \({{\textbf{T}}}_h\) (under the constraint imposed by (5.13)), are well defined, we now proceed as in Sect. 4.3 to address the solvability of the fixed-point equation (5.9). Then, letting \(\delta _\texttt{d}\) be an arbitrary radius, we define
Reasoning analogously to the derivation of Lemma 4.4 (cf. beginning of Sect. 4.3), we define \(\delta _\texttt {d}:=\frac{\widetilde{\varvec{\alpha }}_{{\varvec{\mathrm A}},\mathtt d}}{2\,\Vert c\Vert }\), and deduce that \({{\textbf{T}}}_h\) maps \({\mathrm W}(\delta _\texttt {d})\) into itself under the discrete version of (4.18), i.e.
where \(C_{{{\textbf{T}}},\mathtt d}\) is a positive constant depending only on \(C_{{\textbf{S}}}\), \(C_{{\bar{{\mathrm T}}}}\), \(C_{{\widetilde{{\mathrm T}}}}\), and \((1\,+\,\delta _\texttt {d})\).
On the other hand, employing arguments analogous to those used in the proofs of Lemmas 4.1, 4.2, and 4.3, we can prove the continuity properties of \({\textbf{S}}_h\), \({\bar{{\mathrm T}}}_h\), and \({\widetilde{{\mathrm T}}}_h\), that is the discrete version of (4.19), (4.26), and (4.27), which are exactly as the latter, but with constants denoted \({\mathrm L}_{{\textbf{S}},\mathtt d}\), \({\mathrm L}_{{\bar{{\mathrm T}}},\mathtt d}\), and \({\mathrm L}_{{\widetilde{{\mathrm T}}},\mathtt d}\). Therefore, following a procedure analogous to the one that gave rise to (4.33), we deduce that, there exists a positive constant \({\mathrm L}_{{{\textbf{T}}},\mathtt d}\) which is obtained similarly to \({\mathrm L}_{{{\textbf{T}}}}\), but instead of depending on \(C_{{\textbf{S}}}\), \(C_{{\bar{{\mathrm T}}}}\), \({\mathrm L}_{{\textbf{S}}}\), \({\mathrm L}_{{\bar{{\mathrm T}}}}\), \({\mathrm L}_{{\widetilde{{\mathrm T}}}}\), and \(\delta \) it depends on \(C_{{\textbf{S}},\mathtt d}\), \(C_{{\bar{{\mathrm T}}},\mathtt d}\), \({\mathrm L}_{{\textbf{S}},\mathtt d}\), \({\mathrm L}_{{\bar{{\mathrm T}}},\mathtt d}\), \({\mathrm L}_{{\widetilde{{\mathrm T}}},\mathtt d}\), and \(\delta _\texttt {d}\) such that
for all \(({\varvec{\phi }}_h,{\textbf{z}}_h), ({\varvec{\phi }}_{h,0},{\textbf{z}}_{h,0}) \in {\mathrm W}(\delta _\texttt {d})\).
Consequently, we can now establish the main result of this section.
Theorem 5.4
Assume that the data are sufficiently small so that (5.15) holds. Then, the operator \({{\textbf{T}}}_h\) has a fixed point \(({\varvec{\varphi }}_h,{\textbf{u}}_h)\in {\mathrm W}(\delta _d)\). Equivalently, the coupled problem (5.1) has a solution \((\mathbf {{\textbf{u}}}_h,{\varvec{\sigma }}_h)\in {{\textbf{H}}}_h\times {{\textbf{Q}}}_h\), \(({\varvec{\varphi }}_h,\chi _h)\in {\mathrm X}_{2,h}\times {\mathrm M}_{1,h}\), and \(({\varvec{\sigma }}_{i,h},\xi _{i,h})\in {\mathrm H}_{i,h}\times {\mathrm Q}_{i,h}\), \(i\,\in \,\{1,2\}\), with \(({\varvec{\varphi }}_h,{\textbf{u}}_h)\in {\mathrm W}(\delta _\texttt {d})\). Moreover, there hold the following a priori estimates
where \(C_{\mathbf {{\textbf{u}}},{\varvec{\sigma }},\mathtt d}\) is a positive constant depending only on \(C_{{\textbf{S}},\mathtt d}\) and \(\delta _\texttt {d}\). In addition, under the extra assumption
the aforementioned solutions of (5.9) and (5.1) are unique.
Proof
As indicated above, the fact that \({{\textbf{T}}}_h\) maps \({\mathrm W}(\delta _\texttt {d})\) into itself is consequence of (5.15). Then, the continuity of \({{\textbf{T}}}_h\) (cf. (5.16)) and Brouwer’s theorem (cf. [9, Theorem 9.9-2]) imply the existence of solution of (5.9). In turn, under the additional hypotheses (5.18), Banach’s fixed-point Theorem guarantees the uniqueness of the solution. Additionally, bearing in mind that \(\Vert {\textbf{u}}_h\Vert _{0,4;\Omega }\,\le \,\delta _\texttt {d}\), in either case, (4.6), (4.9), (4.15) yield the a priori estimates (5.17) and conclude the proof. \(\square \)
5.3 A priori error analysis
In this section we consider arbitrary finite element subspaces that satisfy the assumptions specified in Sect. 5.2, and establish the Céa estimate for the Galerkin error
where \(\big ((\mathbf {{\textbf{u}}},\varvec{\sigma }), ({\varvec{\varphi }},\chi ),({\varvec{\sigma }}_i,\xi _i)\big ) \in \big ({{\textbf{H}}}\times {{\textbf{Q}}}\big ) \times \big ({\mathrm X}_2 \times {\mathrm M}_1\big ) \times \big ({\mathrm H}_i \times {\mathrm Q}_i\big )\), \(i\in \big \{1,2\big \}\), is the unique solution of (3.26), and \(\big ((\mathbf {{\textbf{u}}}_h,\varvec{\sigma }_h), ({\varvec{\varphi }}_h,\chi _h),({\varvec{\sigma }}_{i,h},\xi _{i,h})\big ) \in \big ({{\textbf{H}}}_h \times {{\textbf{Q}}}_h\big ) \times \big ({\mathrm X}_{2,h} \times {\mathrm M}_{1,h}\big ) \times \big ({\mathrm H}_{i,h} \times {\mathrm Q}_{i,h}\big )\), \(i\in \big \{1,2\big \}\), is a solution of (5.1). We proceed as in previous related work (see, e.g. [6]) by applying suitable Strang-type estimates to the pairs of associated continuous and discrete schemes arising from (3.26) and (5.1) after splitting them according to the three decoupled equations. Throughout the remainder of this section, given a subspace \(Z_h\) of an arbitrary Banach space \(\big (Z,\Vert \cdot \Vert _Z\big )\), we set
We begin the analysis by considering the first two rows of (3.26) and (5.1), so that, employing the estimates provided by [6, eq. (4.27), Section 4.3], we deduce the existence of a positive constant \({\widehat{C}}_1\), depending only on \(\varvec{\alpha }_\texttt {d}\), \(\varvec{\beta }_\texttt {d}\), \(\Vert {{\textbf{a}}}\Vert \), \(\Vert {{\textbf{b}}}\Vert \), \(\Vert {{\textbf{c}}}\Vert \), \(\delta \), and \(\delta _\texttt{d}\), such that
Thus, proceeding as in (4.24) and using the boundedness of \({{\textbf{c}}}\) (cf. (3.15)), we easily obtain
and
which, replaced back into (5.19), yields
where \({\widehat{C}}_2 \,:=\, {\widehat{C}}_1\max \big \{\varepsilon ^{-1}_0 \, |\Omega |^{1/4},\Vert c\Vert \big \}\). Now, using the estimates obtained in [13, eq. (145), Section 5.3] for the third and fourth rows of (3.26) and (5.1), we find that
with a positive constant \(c_{\bar{\mathrm T}}\) independent of h, and depending in particular on \(\,|\Omega |\), \(\rho \), and r. On the other hand, using the estimates obtained in [13, eq. (147), Section 5.3] for the fifth and sixth rows of (3.26) and (3.26), we get
with a positive constant \(c_{{\widetilde{{\mathrm T}}}}\) independent of h, and depending in particular on \(\,\Vert c\Vert \). For the remainder of the analysis we introduce the partial error
and appropriately combine estimates (5.20), (5.21), and (5.22). In particular, using the right-hand side of (5.21) to bound \(\Vert {\varvec{\varphi }}- {\varvec{\varphi }}_h\Vert _{0,r;\Omega }\) in (5.20) and (5.22), by adding up the resulting inequalities, performing some algebraic manipulations, and then using the a priori bounds for \(\Vert {\varvec{\varphi }}\Vert _{0,r;\Omega }\), \(\Vert {\varvec{\varphi }}_h\Vert _{0,r;\Omega }\), \(\Vert {\varvec{\xi }}\Vert _{0,\rho ;\Omega }\), \(\Vert {\varvec{\xi }}_h\Vert _{0,\rho ;\Omega }\), and \(\Vert {\textbf{u}}\Vert _{0,4;\Omega }\) provided by Theorems 4.8 and 5.4, we deduce the existence of a positive constant \(C_e\), depending on \({\widehat{C}}_1\), \({\widehat{C}}_2\), \(c_{\bar{\mathrm T}}\), \(c_{{\widetilde{{\mathrm T}}}}\), \(\delta \), \(\delta _\texttt {d}\), \(C_{S}\), \(C_{\bar{\mathrm T}}\), \(C_{{\widetilde{{\mathrm T}}}}\), \(C_{\bar{\mathrm T},\mathtt d}\), and \(C_{{\widetilde{{\mathrm T}}},\mathtt d}\), and hence independent of h, such that
Consequently, we are in a position to establish the Céa estimate.
Theorem 5.5
In addition to the hypotheses of Theorems 4.8 and 5.4, assume that
Then, there exists a positive constant C, independent of h, such that
Proof
Under the assumption (5.24), the a priori estimate for \(\texttt {E}\) follows from (5.23), which together with (5.21), yields (5.25) and ends the proof. \(\square \)
We end this section with the a priori estimate for \(\Vert p\,-\,p_h\Vert _{0,\Omega }\) where \(p_h\) is the discrete pressure suggested by the postprocessing formula given by the second identity in (2.7), which, according to (3.8), becomes
Then, applying the Cauchy–Schwarz inequality, performing some algebraic manipulations, and employing the a priori bounds for \(\Vert {\textbf{u}}\Vert _{0,4;\Omega }\) and \(\Vert {\textbf{u}}_h\Vert _{0,4;\Omega }\), we deduce the existence of a positive constant C, depending on data, but independent of h, such that
6 Specific finite element subspaces
We now define finite element subspaces satisfying the hypotheses (H.1)–(H.6) from Sect. 5.2, and provide the rates of convergences for the Galerkin scheme (5.1).
6.1 Preliminaries
In the following we use the notation introduced at the beginning of Sect. 5.1. Thus, given an integer \(k\,\ge \,0\), for each \(K\in {\mathcal {T}}_h\) we let \({\mathrm P}_k(K)\), \({{\textbf{P}}}_k(K)\), and \({\mathbb {P}}_k(K)\) be the scalar, vector, and tensor versions, respectively, of the space of polynomials of degree \(\le \, k\) defined on K. Similarly, letting \({{\textbf{x}}}\) be a generic vector in \({\mathrm R}^n\), \({\textbf{RT}}_k(K)\,:=\,{{\textbf{P}}}(K)\,+\,{\mathrm P}_k(K){{\textbf{x}}}\) and \(\mathbb{R}\mathbb{T}_k(K)\) stand for the local Raviart–Thomas space of order k defined on K and its associated tensor counterpart. Additionally, we let \({\mathrm P}_k({\mathcal {T}}_h)\), \({{\textbf{P}}}_k({\mathcal {T}}_h)\), \({\mathbb {P}}_k({\mathcal {T}}_h)\), \({\textbf{RT}}_k({\mathcal {T}}_h)\) and \(\mathbb{R}\mathbb{T}_k({\mathcal {T}}_h)\) be the global versions of \({\mathrm P}_k(K)\), \({{\textbf{P}}}_k(K)\), \({\mathbb {P}}_k(K)\), \({\textbf{RT}}_k(K)\) and \(\mathbb{R}\mathbb{T}_k(K)\), respectively, that is
We notice here that for each \(t\in (1,+\infty )\) there hold the inclusions \({\mathrm P}_k({\mathcal {T}}_h)\,\subseteq \,{\mathrm L}^t(\Omega )\), \({{\textbf{P}}}_k({\mathcal {T}}_h)\,\subseteq \,{{\textbf{L}}}^t(\Omega )\), \({\mathbb {P}}_k\,\subseteq \,{\mathbb {L}}^t(\Omega )\), \({\textbf{RT}}_k(\Omega )\,\subseteq \,{{\textbf{H}}}(\textrm{div}_t;\Omega )\), \({\textbf{RT}}_k(\Omega )\,\subseteq \,{{\textbf{H}}}^t(\textrm{div}_t;\Omega )\), and \(\mathbb{R}\mathbb{T}_k({\mathcal {T}}_h)\,\subseteq \,{{\mathbb {H}}}(\textbf{div}_t;\Omega )\), which are employed below to introduce our specific finite element subspaces. Indeed, we now set
6.2 Verification of the hypotheses (H.1)–(H.6)
We begin by observing that the hypotheses (H.1) and (H.2) are exactly the same as [6, (H.1) and (H.2)], particularly is proved in [6, Lemma 5.1]. In turn, we emphasize that (H.3) corresponds exactly to [6, (H.5)], and hence we omit most details and refer to [6, Section 5.2, Lemma 5.2]. Finally, it is clear from (6.1) that (H.5) is trivially satisfied (cf. [16, Lemma 3.6, part (i)]), whereas (H.6) was proved precisely by [17, Lemma 4.5].
6.3 The rates of convergence
Here we present the rates of convergence of the Galerkin scheme (5.1) with the specific finite element subspaces introduced in Sect. 6.1, for which the respective approximation properties were previously collected. In fact, it follows easily from [15, Proposition 1.135] and its vector and tensorial versions, along with interpolation estimates of Sobolev spaces, that those of \({{\textbf{H}}}_h^{{\textbf{u}}}\), \({{\mathbb {H}}}_h^{{{\textbf{t}}}}\), \({\mathrm Q}_{i,h}\), and \({\mathrm M}_{1,h}\) are given as follows
\(\left( \textbf{A P}_{h}^{{\textbf{u}}}\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [0, k\,+\,1]\), and for each \({\textbf{v}}\in {{\textbf{W}}}^{l,4}(\Omega )\), there holds
\(\left( \textbf{A P}_{h}^{{{\textbf{t}}}}\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [0, k\,+\,1]\), and for each \({\textbf{s}} \in {{\mathbb {H}}}^l(\Omega )\cap {{\mathbb {L}}}^2_{{\textrm{tr}}}(\Omega )\), there holds
\(\left( \textbf{A P}_{h}^{\xi _i}\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [0, k\,+\,1]\), and for each \(\eta _{i}\in {\mathrm W}^{l,\rho }(\Omega )\), there holds
\(\left( \textbf{A P}_{h}^{\chi }\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [0, k\,+\,1]\), and for each \(\lambda \in {\mathrm W}^{l,r}(\Omega )\), there holds
Furthermore, from [17, eq. (4.6), Section 4.1] and its tensor version, which, as the foregoing ones, are derived classically by using the Deny–Lions Lemma and the corresponding scaling estimates (cf. [15, Lemmas B.67 and 1.101]), we state below the approximation properties of \({{\textbf{Q}}}_h\) and \({\mathrm H}_{i,h}\)
\(\left( \textbf{A P}_{h}^{{\varvec{\sigma }}}\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [1, k\,+\,1]\), and for each \({\varvec{\tau }}\in {{\mathbb {H}}}^l(\Omega )\cap {{\mathbb {H}}}_0(\textbf{div}_{4/3};\Omega )\) with \(\textbf{div}({\varvec{\tau }})\in {{\textbf{W}}}^{l,4/3}(\Omega )\), there holds
\(\left( \textbf{A P}_{h}^{{\varvec{\sigma }}_i}\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [1, k\,+\,1]\), and for each \({\varvec{\tau }}_i\in {{\mathbb {H}}}^l(\Omega )\) with \(\textrm{div}({\varvec{\tau }}_i)\in {{\textbf{W}}}^{l,\varrho }(\Omega )\), there holds
Finally, that of \({\mathrm X}_{2,h}\), which we recall from [17, Section 4.5 \(\left( \textbf{A P}_{h}^{{\textbf{u}}}\right) \)], becomes
\(\left( \textbf{A P}_{h}^{{\varvec{\varphi }}}\right) \) there exists a positive constant C, independent of h, such that for each \(l\in [1, k\,+\,1]\), and for each \({\varvec{\phi }}\in {{\textbf{W}}}^{l,r}(\Omega )\) with \(\textrm{div}({\varvec{\phi }})\in {\mathrm W}^{l,r}(\Omega )\), there holds
The rates of convergence of (5.1) are now provided by the following theorem.
Theorem 6.1
Let \(\big ((\mathbf {{\textbf{u}}},{\varvec{\sigma }}),({\varvec{\varphi }},\xi ), ({\varvec{\sigma }}_i,\xi _i)\big )\,\in \, ({{\textbf{H}}}\,\times \,{{\textbf{Q}}})\,\times \,({\mathrm X}_2\,\times \,{\mathrm M}_1)\,\times \,({\mathrm H}_i\,\times \,{\mathrm Q}_i)\), \(i\,\in \,\{1,2\}\) be the unique solution of (3.26) with \(({\varvec{\varphi }},{\textbf{u}})\,\in \,{\mathrm W}(\delta )\), and let \(\big ((\mathbf {{\textbf{u}}}_h,{\varvec{\sigma }}_h),({\varvec{\varphi }}_h,\xi _h), ({\varvec{\sigma }}_{i,h},\xi _{i,h})\big )\,\in \, ({{\textbf{H}}}_h\,\times \,{{\textbf{Q}}}_h)\,\times \,({\mathrm X}_{2,h}\,\times \,{\mathrm M}_{1,h})\,\times \,({\mathrm H}_{i,h}\,\times \,{\mathrm Q}_{i,h})\), \(i\,\in \,\{1,2\}\) be a solution of (5.1) with \(({\varvec{\varphi }}_h,{\textbf{u}}_h)\,\in \,{\mathrm W}(\delta _\texttt {d})\), which is guaranteed by Theorems 4.8 and 5.4, respectively. In turn, let p and \(p_h\) be given by (2.7) and (5.26), respectively. Assume the hypotheses of Theorem 5.5, and that there exists \(l\,\in \,[1, k\,+\,1]\) such that \({\textbf{u}}\,\in \,{{\textbf{W}}}^{l,4}(\Omega )\), \({{\textbf{t}}}\,\in \, {{\mathbb {H}}}^l(\Omega )\,\cap \, {{\mathbb {L}}}^2_{{\textrm{tr}}}(\Omega )\), \({\varvec{\sigma }}\,\in \,{{\mathbb {H}}}^l(\Omega )\,\cap \,{{\mathbb {H}}}_0(\textbf{div}_{4/3};\Omega )\), \(\textbf{div}({\varvec{\sigma }})\,\in \,{{\textbf{W}}}^{l,4/3}(\Omega )\), \({\varvec{\varphi }}\,\in \,{{\textbf{W}}}^{l,r}(\Omega )\), \(\textrm{div}({\varvec{\varphi }})\,\in \,{\mathrm W}^{l,r}(\Omega )\), \(\chi \,\in \,{\mathrm W}^{l,r}(\Omega )\), \({\varvec{\sigma }}_{i}\,\in \, {{\mathbb {H}}}^l(\Omega )\), \(\textrm{div}({\varvec{\sigma }}_i)\,\in \,{{\textbf{W}}}^{l,\varrho }(\Omega )\), and \(\xi _i\,\in \,{\mathrm W}^{l,\varrho }(\Omega )\), \(i\,\in \,\{1,2\}\). Then, there exists a positive constant C, independent of h, such that
Proof
It follows straightforwardly from Theorem 5.5, (5.26), and the above approximation properties. \(\square \)
6.4 Conservation properties
We first let \({\mathcal {P}}^k_h: \mathrm L^1(\Omega )\rightarrow \mathrm P_k({{\mathcal {T}}_h})\) be the projector defined, for each \(v\in \mathrm L^1(\Omega )\), as the unique element \({\mathcal {P}}^k_h(v) \in \mathrm P_k({{\mathcal {T}}_h})\) such that
and let \(\varvec{{\mathcal {P}}}^k_h: {\textbf{L}}^1(\Omega )\rightarrow {\textbf{P}}_k({{\mathcal {T}}_h})\) be its corresponding vector version. Then, according to the definitions of the specific finite element subspaces \({{\textbf{H}}}^{\textbf{u}}_h\), \({\mathrm M}_{2,h}\) and \({\mathrm Q}_{i,h}\), \(i\in \big \{1,2\big \}\), provided in (6.1), we readily deduce from (5.2), (5.3), and (5.4), that there hold
and
respectively, which constitute the discrete conservation of momentum properties of (5.1).
7 Numerical results
The computational tests in this section have been realized using the finite element library FEniCS [1]. The nonlinear algebraic systems are solved with Newton’s method with a residual tolerance of \(10^{-6}\). The linear systems are solved with the direct method MUMPS. The zero-mean condition for the trace of the \({\mathbb {H}}_0(\textbf{div}_{4/3};\Omega )\) component \({\varvec{\sigma }}_0\) of the original Bernoulli-type stress tensor \({\varvec{\sigma }}\), is enforced using a real Lagrange multiplier. Recall that in Sect. 3.2, \({\varvec{\sigma }}_0\) was simply redenoted \({\varvec{\sigma }}\).
7.1 Verification of convergence
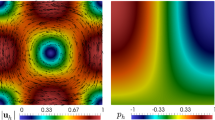
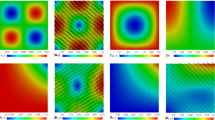
We choose the arbitrary model parameters \(\mu = \varepsilon = 0.1\), \(\omega = 0.5\), \(\kappa _1 = 0.01\), \(\kappa _2 = 0.2\), and, letting \({{\textbf{x}}}:= (x,y)\) (resp. \({{\textbf{x}}}:= (x,y,z)\)) be a generic vector of \({\mathrm R}^2\) (resp. \({\mathrm R}^3\)), define the following manufactured exact solutions to (2.8) in 2D and 3D, respectively
and mixed variables
With these smooth fields we construct forcing/source terms and non-homogeneous Dirichlet boundary conditions \({\textbf{f}},{\textbf{g}},f_i,g_i\). For the 3D case we take the Banach exponents \( r = 3\), \(s = 3/2\), \(\rho = 6\), \(\varrho = 6/5\), while for the 2D computations we use \( r = \rho = 4\), \(s = \varrho =4/3\). The problem is numerically solved on a sequence of \(\texttt {n}_k^{\max }\) successively refined regular meshes. Errors in the norms from Theorem 6.1 are separated in the contribution from each unknown. The error history is portrayed in Fig. 1, where in the 2D case we also run the convergence tests for the second-order scheme (using \(k=1\)). It is noted that, irrespective of the spatial dimension or the polynomial degree, the method converges optimally. Furthermore, Fig. 2 shows approximate solutions for primary and mixed variables, all fields sufficiently well captured.

Convergence test in 2D and 3D. Error history associated with the fully mixed method for \(k=0\) and in 2D (left), for \(k=1\) and in 2D (middle), and for \(k=0\) and 3D (right). Primary variables (top) and mixed variables (bottom)

Convergence test in 2D and 3D. Approximate velocity, velocity gradient, Bernoulli-type stress tensor, electric field, electrostatic potential, flux of cations, concentration of cations, flux of anions, concentration of anions, computed with the first-order method
We also study the conservation features of the method explained in Sect. 6.4, for which the following numbers
are computed at each refinement level and tabulated in Table 1 together with the total error
and its experimental convergence rate \( \texttt {r} =\log (\texttt{e}/\widehat{\texttt {e}})[\log (h/\widehat{h})]^{-1}\,, \) where \(\texttt {e}\) and \(\widehat{\texttt {e}}\) denote errors produced on two consecutive meshes of sizes h and \(\widehat{h}\), respectively. Note here that the above \(\Vert \cdot \Vert _{\ell ^\infty }\) norms are computed by considering the degrees of freedom defining uniquely the respective scalar or vector piecewise polynomials to which they are applied. We report on the 2D case only (in 3D we obtain analogous results). The expected optimal convergence of the total error, and the announced local conservativity are confirmed. We also see that after the first mesh refinement the number of Newton iterations required for convergence is four.
7.2 Ion spreading in a charged enclosure
In order to further validate our numerical methods, inspired by the tests in [23, Section 5.2] we simulate the phenomenon of electrodiffusion of ions in a charged reservoir. We follow the parametrization used there, but we consider only constant coefficients (the referenced paper focuses on concentration-dependent density, viscosity, and diffusivity). Another simplification with respect to [23] is that we only take the canonical momentum \(\omega {\textbf{u}}\) (that is, without mass diffusion or migration due to the ionic species).
The domain is \(\Omega = (0,1)\times (0,2)\), which we discretize into a structured mesh of 10,000 triangles. As illustrated in Fig. 3, the boundary conditions are as follows: for the fluid flow we impose no-slip \({\textbf{u}}= \varvec{0}\) everywhere on the boundary. For the chemical species we assume that the normal trace of the total fluxes is zero everywhere on the boundary \({\varvec{\sigma }}_i\cdot {\varvec{\nu }}= 0\) (that is, the boundary is considered impenetrable for the ionic quantities), which is imposed essentially in the space \({\mathrm H}_{i,h}\). For the electrostatic sub-system we consider two separate sub-boundaries: on the top segment (\(y=2\)) we prescribe a given potential \(\chi _0\) (representing a ground condition, imposed naturally), on the vertical walls of the reservoir we set zero normal trace of the electric field \({\varvec{\varphi }}\cdot {\varvec{\nu }}= 0\), and the bottom segment is regarded as a positively charged surface \({\varvec{\varphi }}\cdot {\varvec{\nu }}=s_E\) (the two last conditions are imposed essentially).

Ion spreading in a charged enclosure. Set up of the geometry, boundary conditions for the electrostatic equations, and initial distribution of positively and negatively charged ion particles
The mixing/spreading process is intrinsically time-dependent and so we include in the formulation the following modified versions of the fully-discrete momentum and ion conservation equations

Ion spreading in a charged enclosure. Net charge (top), electric potential (middle), and velocity line integral convolution (bottom) at times \(t = 0,0.5,0.75,1,2.5\) (from left to right columns)
for all \(\mathbf {{\textbf{v}}}_h\in {{\textbf{H}}}_h\), and for all \(\eta _{i,h} \in {\mathrm Q}_{i,h}\), respectively, where the superscripts \(m,m+1\) denote approximations at time instants \(t^{m},t^{m+1}\) using backward Euler’s method. For this we take a constant time step \(\Delta t= 0.01\) and conduct the simulations until the final time \(t=2.5\). The initial velocity is zero and the initial concentrations of positively and negatively charged particles are as follows
respectively (see also the sketch in Fig. 3). The model parameters are as follows
The numerical solutions are displayed in Fig. 4, where we plot snapshots at five time instants of the net charge (computed as the difference between positively and negatively charged ion species) and the line integral convolution (similar to streamlines) of the fluid velocity. Exactly as in [23, Figure 6], in our case we observe that the flow patterns that occur thanks to the interaction of difference of potential and charges (different on the top and bottom boundaries) permit spreading into the reservoir, and the net charge figures show the expected decay due to dissipation.
References
Alnæs, M.S., Blechta, J., Hake, J., Johansson, A., Kehlet, B., Logg, A., Richardson, C., Ring, J., Rognes, M.E., Wells, G.N.: The FEniCS project version 1.5. Arch. Numer. Softw. 3(100), 9–23 (2015)
Benavides, G.A., Caucao, S., Gatica, G.N., Hopper, A.A.: A Banach spaces-based analysis of a new mixed-primal finite element method for a coupled flow-transport problem. Comput. Methods Appl. Mech. Eng. 371, 113285 (2020)
Bernardi, C., Canuto, C., Maday, Y.: Generalized inf-sup conditions for Chebyshev spectral approximation of the Stokes problem. SIAM J. Numer. Anal. 25(6), 1237–1271 (1988)
Camaño, J., García, C., Oyarzúa, R.: Analysis of a momentum conservative mixed-FEM for the stationary Navier–Stokes problem. Numer. Methods Partial Differ. Equ. 37(5), 2895–2923 (2021)
Camaño, J., Muñoz, C., Oyarzúa, R.: Numerical analysis of a dual-mixed problem in non-standard Banach spaces. Electron. Trans. Numer. Anal. 48, 114–130 (2018)
Caucao, S., Colmenares, E., Gatica, G.N., Inzunza, C.: A Banach spaces-based fully mixed finite element method for the stationary chemotaxis-Navier–Stokes problem. Comput. Math. Appl. 145, 65–89 (2023)
Caucao, S., Oyarzúa, R., Villa-Fuentes, S.: A new mixed-FEM for steady-state natural convection models allowing conservation of momentum and thermal energy. Calcolo 57(4), 36 (2020)
Caucao, S., Yotov, I.: A Banach space mixed formulation for the unsteady Brinkman–Forchheimer equations. IMA J. Numer. Anal. 41(4), 2708–2743 (2021)
Ciarlet, P.: Linear and Nonlinear Functional Analysis with Applications. Society for Industrial and Applied Mathematics, Philadelphia (2013)
Colmenares, E., Gatica, G.N., Moraga, S.: A Banach spaces-based analysis of a new fully-mixed finite element method for the Boussinesq problem. ESAIM Math. Model. Numer. Anal. 54(5), 1525–1568 (2020)
Colmenares, E., Neilan, M.: Dual-mixed finite element methods for the stationary Boussinesq problem. Comput. Math. Appl. 72(7), 1828–1850 (2016)
Correa, C.I., Gatica, G.N.: On the continuous and discrete well-posedness of perturbed saddle-point formulations in Banach spaces. Comput. Math. Appl. 117, 14–23 (2022)
Correa, C.I., Gatica, G.N., Ruiz-Baier, R.: New mixed finite element methods for the coupled Stokes and Poisson–Nernst–Planck equations in Banach spaces. ESAIM Math. Model. Numer. Anal. 57(3), 1511–1551 (2023)
Dehghan, M., Gharibi, Z., Ruiz-Baier, R.: Optimal error estimates of coupled and divergence-free virtual element methods for the Poisson–Nernst–Planck/Navier–Stokes equations and applications in electrochemical systems. J. Sci. Comput. 94(3), 72 (2023)
Ern, A., Guermond, J.-L.: Theory and practice of finite elements. In: Applied Mathematical Sciences, vol. 159. Springer, New York (2004)
Gatica, G.N.: A Simple Introduction to the Mixed Finite Element Method. Theory and Applications. SpringerBriefs in Mathematics. Springer, Cham (2014)
Gatica, G.N., Meddahi, S., Ruiz-Baier, R.: An L\(^p\) spaces-based formulation yielding a new fully mixed finite element method for the coupled Darcy and heat equations. IMA J. Numer. Anal. 42(4), 3154–3206 (2022)
Gatica, G.N., Oyarzúa, R., Ruiz-Baier, R., Sobral, Y.D.: Banach spaces-based analysis of a fully-mixed finite element method for the steady-state model of fluidized beds. Comput. Math. Appl. 84, 244–276 (2021)
He, M., Sun, P.: Mixed finite element analysis for the Poisson–Nernst–Planck/Stokes coupling. J. Comput. Appl. Math. 341, 61–79 (2018)
He, M., Sun, P.: Mixed finite element method for modified Poisson–Nernst–Planck/Navier–Stokes equations. J. Sci. Comput. 87(3), 80 (2021)
Howell, J., Walkington, N.: Dual-mixed finite element methods for the Navier–Stokes equations. ESAIM Math. Model. Numer. Anal. 47(3), 789–805 (2013)
Kim, S., Khanwalea, M.A., Anand, R.K., Ganapathysubramanian, B.: Computational framework for resolving boundary layers in electrochemical systems using weak imposition of Dirichlet boundary conditions. Finite Elements Anal. Design 205, 103749 (2022)
Linga, G., Bolet, A., Mathiesen, J.: Transient electrohydrodynamic flow with concentration-dependent fluid properties: modelling and energy-stable numerical schemes. J. Comput. Phys. 412, 109430 (2020)
Mitscha-Baude, G., Buttinger-Kreuzhuber, A., Tulzer, G., Heitzinger, C.: Adaptive and iterative methods for simulations of nanopores with the PNP-Stokes equations. J. Comput. Phys. 338, 452–476 (2017)
Prohl, A., Schmuck, M.: Convergent finite element discretizations of the Navier–Stokes–Nernst–Planck–Poisson system. ESAIM Math. Model. Numer. Anal. 44, 531–571 (2010)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was partially supported by ANID-Chile through Centro de Modelamiento Matemático (FB210005), and Anillo of Computational Mathematics for Desalination Processes (ACT210087); by Centro de Investigación en Ingeniería Matemática (CI\(^2\)MA), Universidad de Concepción; by the Monash Mathematics Research Fund S05802-3951284; by the Ministry of Science and Higher Education of the Russian Federation within the framework of state support for the creation and development of World-Class Research Centers Digital biodesign and personalized healthcare No. 075-15-2022-304; and by the Australian Research Council through the Future Fellowship grant FT220100496 and Discovery Project grant DP22010316 .
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Correa, C.I., Gatica, G.N., Henríquez, E. et al. Banach spaces-based mixed finite element methods for the coupled Navier–Stokes and Poisson–Nernst–Planck equations. Calcolo 61, 31 (2024). https://doi.org/10.1007/s10092-024-00584-2
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10092-024-00584-2