
Abstract
Understanding the risk of collision between tidal stream turbines and marine species is required for environmental impact assessment. Field observations are often limited by sensor capabilities. This study used a laboratory-scale water tank to monitor fine-scale fish behavior near a model of rotating turbine blades. Differences in behavior between three species were investigated: Oryzias latipes, Gnathopogon elongatus, and Rhodeus ocellatus ocellatus. Behavioral response under dark conditions was further investigated for Gnathopogon elongatus, as it showed active behavior near the turbine under bright conditions. 71% of fish actively avoided or swam away from the turbine during bright conditions. Under dark conditions, 92% avoided or swam away; fish approached less frequently and retreated sooner than in bright conditions. Alertness in dark conditions possibly increases due to the inability of fish to visually detect the blades; thus, dark conditions may not be directly linked to a higher collision risk. No striking events occurred which resulted in injury or mortality.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Marine renewable energy is a promising method to realize sustainable societies and has advanced rapidly in recent years. Before installing marine renewable energy devices, an environmental impact assessment (EIA) is required to obtain permission and facilitate the consenting process between regulators and stakeholders. Stakeholders, in particular fishers, are often concerned about risks to fish if the device is installed in fishing areas. Copping et al. [1, 2] summarized impacts of tidal and wave power generation, and concluded that a single device may have relatively minor environmental impacts including underwater noise and electromagnetic fields. These impacts may become greater in the future as individual devices are scaled up to arrays. For tidal power generation, turbines with rotating blades are installed in the sea, and EIAs require investigation of possible impacts, such as collision risk, to marine species. However, due to a lack of available observational data, potential impacts are still unknown, even for a single device, and information on collision risk is lacking.
Several monitoring studies have been conducted using acoustic sensors to observe presence of fish around hydrokinetic devices at different sites [3,4,5,6,7,8,9]. Results showed that presence and distribution of fish varied with environmental cycles, such as seasons and tides. Presence of fish has also been observed around turbine support structures and related devices [10,11,12,13], with aggregation of fish observed more frequently around the structure compared to reference sites. Generally, fish are attracted by anthropogenic structures, such as offshore wind farms [14,15,16,17,18], wave power foundations [19, 20], and oil and gas platforms [21,22,23,24].
There is no evidence for direct collision between turbine blades and fish in natural environments; however, field observations are often limited by sensor capabilities, e.g., acoustic resolution, camera visibility/water turbidity, data volumes, analysis and automation methods. Potential collision continues to be of concern for regulators and stakeholders, often requiring collision-risk modeling prior to gaining consent. Hence, field studies often focus on estimating collision risk (encounter rate, fine-scale evasion) which can be supported by tank studies to provide fundamental data about fine-scale fish behavior near rotating turbine blades.
Several studies have been conducted to monitor fish around turbine blades using laboratory-scale tank or flume experiments [25,26,27,28,29,30]; however, these studies were all conducted under bright conditions. Direct collision has not been reported, except by Yoshida et al. [30] who reported direct collision of the species Gnathopogon elongatus. The fish were occasionally distracted from the rotating turbine blades by currents within the tank, which resulted in a high collision risk. However, their experiment was conducted under limited conditions, i.e., only one species was observed, and only under bright conditions.
In this study, we first conducted experiments using three species of fish, and then the species showing the highest collision risk was selected for the second phase, which focused on their behavior near the turbine blades under dark conditions (i.e. removing visual cues). For such conditions, a field survey [5,6,7] reported higher presence of fish around a turbine at night than during the day, while another study showed no significant difference in numbers between day and night around a turbine structure or in natural flow conditions [12]. The presence of fish may also vary depending on the location and fish species prevalent in the area; however, fish may have difficulty in detecting and avoiding rotating turbine blades due to lack of visibility. If presence of fish increases around the device at night, collision risk may be higher. Therefore, this experiment aims to mimic dark conditions (i.e. night) to observe fish behavior near rotating turbine blades. From these results, we will discuss how fish react to rotating blades under dark conditions and how the reaction relates to collision risk.
2 Methodology
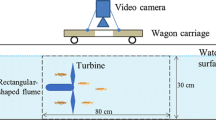
A laboratory-scale water tank was used for the experiment. Figure 1 illustrates the experimental setup, and Fig. 2 shows a photograph of the experiment. It was installed at the Marine Ecosystem Engineering Laboratory of the Institute of Industrial Science, University of Tokyo, Japan. The water tank dimensions were 5 m × 1 m × 0.5 m in length, width, and height.

Figure adapted from Yoshida et al. [30]
Schematic of the experimental setup, including the turbine of diameter 0.25 m.

Photo of the water tank experiment showing the camera and turbine (0.25 m diameter)
The experimental conditions were similar to those described in a previous study [30]. The experiment was conducted at a water temperature of 14–17 °C for three species of fish under bright condition to investigate differences between species. A second experiment was conducted at 25 °C for one species under normal (bright) conditions and dark conditions to investigate the influence of illumination. The increased temperature occurred during summer. However, comparisons are not made between experiments to avoid any potentially confounding effect of water temperature; instead, comparisons are made within experiments, i.e., between species (experiment 1) and between bright/dark (experiment 2).
The observational area was in a partitioned section of the water tank of dimensions 0.6 m × 0.3 m × 0.35 m in length, width, and height. The turbine’s diameter was 0.25 m, and the tip speed ratio was 5. Thus, the narrowest space on either side is 0.025 m, and the narrowest space above is approximately 0.05 m. A water pump was used to generate current. To achieve the desired turbine rotating speed, a motor was connected to the turbine shaft, because the water current in the tank was limited. The rotating speed and water current were set to 20 rpm and approximately 0.05 m/s, respectively. Current speed was measured by an electromagnetic current meter for laboratory use (ACM2-RS, JFE Advantech Co., Ltd.). The settled current was measured at the center point of the model turbine located in the observation area, and the current was similar across the tank.
Five randomly selected fish from each species group were released into the observation area. They were acclimatized to the environment with the rotating turbine blades for 30 min before the experiment. Then, their behavior was recorded for 11 min. This was repeated several times (approximately five repetitions) to investigate differences between fish species. The experiment was repeated two times for different species of fish under bright condition, and five times for one species under bright and dark conditions sequentially. Behaviors were determined by analyzing the experimental video files taken by an underwater camera. We assume that the fish were capable of maneuvering and holding station in the flow without fatigue for the experimental period; in addition, noise from tank machinery is neglected.
The underwater camera was an HX-A1-H (Panasonic Corporation), which was installed at the bottom of the water tank, and the video camera was an HC-VZX992M-T (Panasonic Corporation), which was installed at the side of the water tank on the outside. The images were full HD, sampling at 20 frames per second. The cameras have a night-vision function with zero-lux mode using a separate infrared light to monitor fish behavior under dark conditions. The use of infrared is acceptable, as fish cannot see this wavelength. The wavelength of the infrared light ranged from 850 to 940 nm.
To reproduce dark conditions, a blackout curtain was used to cover the water tank, as shown in Fig. 3. Figure 4 is a snapshot taken during the experiment under dark conditions, and it was recorded by the underwater night-vision camera with infrared light, showing the rotating blades and the fish.

Blackout curtain covering the water tank to reproduce dark conditions

Snapshot during the experiment under dark conditions using infrared light and a night-vision camera, rotating turbine blades (center), and fish (bottom left)
The behavior of fish near the turbine was classified as follows (as shown in Fig. 5): “avoiding” when the fish changed its movement in front of the blades to pass outside of the rotating blades; “entering,” when the fish swam through the area of the rotating blades but did not make contact with the blades; “responding and entering” when the fish changed its direction but still swam through the area of the rotating blades; “high collision risk” when the rotating blades struck or made light contact with the fish; and “returning” when the fish turned in front of the rotating blades and moved back in the direction it came from. If the observer could not judge whether the fish made contact with the blades, because the fish came too close before avoiding the rotating blades, the response was classified as high collision risk.

Figure adapted from Yoshida et al. [30]
Classification of fish behaviors around the turbine blades: avoiding, entering, responding and entering, high striking risk, and returning.
In this study, the three fish species used in the experiment (Fig. 6) were Oryzias latipes, Gnathopogon elongatus, and Rhodeus ocellatus ocellatus, and their lengths were approximately 0.02–0.03 m, 0.04–0.05 m, and 0.03–0.04 m, respectively. Gnathopogon elongatus was used as the experimental species under dark conditions, as it showed active behavior near the rotating blades under bright conditions and for comparison to previous work [30]. Gnathopogon elongatus and Rhodeus ocellatus ocellatus belong to the carp family and were selected based on their lengths and the scaling in the tank experiment for comparison with fish species found in real ocean sites. In terms of swimming behavior, Gnathopogon elongatus is considered to be relatively similar to Japanese horse mackerel (Trachurus japonicus) and Japanese sea bass (Lateolabrax japonicus), and Rhodeus ocellatus ocellatus is relatively similar to the red sea bream (Pagrus major). Oryzias latipes is a dartfish, a small floating fish (like sardine) and a relative of the saury (Cololabis saira), with similar swimming behavior. In terms of swimming depth, Oryzias latipes often swim near the surface, while Gnathopogon elongatus and Rhodeus ocellatus ocellatus often swim in the middle to bottom of the water column.

Figure adapted from Yoshida et al. [30]
Photo of fish used in the experiment: Oryzias latipes (0.02–0.03 m long), Gnathopogon elongatus (0.04–0.05 m long), and Rhodeus ocellatus ocellatus (0.03–0.04 m long).
The fish species were selected under the assumption of the similarity law, which is the ratio between the tip speed of the turbine and the maximum swim speed of the fish. This enabled us to determine whether the fish would be able to avoid the turbine when they approached it. Based on this, fish responses in the real ocean site can be predicted using experimental results based on the similarity law. The similarity law assumed during the water tank experiment was described by Taya [28] and Zhang et al. [29]. First, to calculate the maximum swim speed of a fish, Triantafyllou et al. [31] reported that it is related to the amplitude of the tail tip. It is also related to the body length of the fish [32]. From this, the maximum swim speed of a fish (U) can be expressed as:
where f is the frequency of the tail beat, l is the length of the fish, and St is the Strouhal number, a dimensionless number describing oscillating flow mechanisms. We assumed that the amplitude of the tail tip was 20% of the body length, and the frequency of the tail beat was 10–20 Hz. Therefore, f = 20 Hz and St = 0.33 were used as representative values in accordance with Taya [28] and Zhang et al. [29].
To compare between bright and dark conditions in the tank experiment, the probability, simple correlation coefficient, and p value between behaviors under different conditions were calculated using Microsoft Excel. The p value is the probability of results being at least as extreme as those observed if the null hypothesis (assuming no difference between data and observed values) is true. A p value of ≤ 0.05 was used to indicate significance.
3 Results and discussion
3.1 Three fish species under bright condition
We conducted the first part of the experiment using three fish species for two repetitions to observe their behavior near the turbine blades in bright conditions and to determine the most active species near the rotating turbine blades. Table 1 lists the total number of behavior classifications observed and the probability for each of the three fish species. Considering the characteristics of each fish species, it was expected that Oryzias latipes would have a slower maximum swimming speed and, therefore, a higher possibility of collision, but the results showed no higher collision risk compared to Gnathopogon elongatus. Gnathopogon elongatus was the most likely to exhibit the behavior of responding and entering, thus, had a higher collision risk. High collision risk was not a behavior seen in Oryzias latipes or Rhodeus ocellatus ocellatus. Oryzias latipes may have retreated from the turbine due to their low swimming ability (estimated from Eq. 1). Similarly, Rhodeus ocellatus ocellatus showed the response of returning during the experiment, as they usually swim in the bottom layer. For these two species, the number of interactions with the turbine was low, and this may have been due to vigilance in the presence of the turbine. Meanwhile, Gnathopogon elongates were active around the rotating turbine blades, as they can easily avoid the blade, because their maximum swimming speed is faster than the tip speed of the turbine blade, and they sometimes approached the turbine, in contrast with the other species. The results of this experiment suggest that presence of a rotating turbine affects species differently, depending on the swimming characteristics of the species.
Scaling tank measurements to real ocean sites relies on the ratio between fish length and blade tip speed. The lengths of fish used in the experiments are listed in Table 2. They ranged from 0.02 to 0.05 m. Table 2 also summarizes the maximum swim speed of each fish species and the ratio with tip speed. From this, the experimental ratio between maximum swim speed and tip speed was approximately 0.4–1.3. In one example of a real ocean site, fish length ranges from 0.03 to 0.5 m [6]. They also reported that the average current speed is 1.6 m/s, the average rotational speed of the turbine is 21.4 rpm, and the average tip speed of the turbine is 2.1 m/s. From this, the maximum swim speed can be estimated as approximately 0.4–6.1 m/s from Eq. 1. When the tip speed is 2.1 m/s, the ratio between the tip speed and maximum swimming speed is approximately 0.3–5.2 in a real ocean setting. If the value is less than 1, the fish can avoid the rotating turbine blades relatively easily. The experimental cases can be applied to relatively large fish; in particular, Gnathopogon elongatus can be assumed to be approximately 0.25–0.35 m in length in an assumed real ocean site.
As Gnathopogon elongates was the most active near the turbine in normal (bright) conditions, and therefore, had the highest collision risk, Gnathopogon elongates was used in the second part of the experiment conducted under dark conditions.
3.2 Comparison with bright and dark conditions
Using Gnathopogon elongates, the total number of different behaviors for five repetitions under bright and dark conditions is shown in Table 3. Table 3 also lists the probability of each behavior, and the correlation to compare between bright and dark conditions. Table 4 lists mean, variance, and the p values at each behavior for five repetitions.
Comparing to the first trial in the previous section, the tendency of fish behavior is similar to the second experiments as shown in Tables 1 and 3, although the water temperature was higher. Therefore, we assumed the effect of water temperature on Gnathopogon elongates can be neglected in this experiment. As indicated in Table 3, avoiding and returning were the most common behaviors. Entering, and responding and entering, occurred less frequently, and only 2 out of 92 behaviors were classified as high collision risk due to the fish being touched by the turbine blade, or avoiding the blades just before they reached it. Figure 7 shows examples of time-series snapshots for each fish behavior shown in Fig. 5. A time-series snapshot before and after high collision risk is also shown in Fig. 7, although neither case resulted in injury to the fish. According to other laboratory-scale tank or flume experiments [25,26,27,28,29,30], the mortality rate 48 h after the experiments was considered. In this study, no fish died within 48 h after the experiment.

Time-series snapshots of each fish behavior
With regard to differences between bright and dark conditions, avoiding, entering, responding and entering, and high collision risk occurred more often in bright conditions than in dark conditions, while the response of returning occurred more often in dark conditions. As shown in Table 3, the probability of returning under the dark condition was 64.1%, while it was 36.4% under bright conditions. Avoidance in bright conditions occurred approximately twice as often as in dark conditions, nevertheless the probabilities were similar between them. This is because the total number of fish behaviors under the bright condition is larger than that of the dark condition. In terms of high collision risk, the probability reduced from 5.0% under bright conditions to 2.2% under dark conditions. Overall, the correlation between bright and dark conditions was high (0.88) suggested that there is no difference between bright and dark conditions. In terms of each behavior as shown in Table 4, p value suggesting that entering the turbine area occurred significantly less often during dark conditions than during bright; however, there was no significant difference in occurrence of the other behaviors between bright and dark conditions. The total number of behaviors showed the fish were more active in the vicinity of the rotating turbine blades in bright conditions, which could result in higher collision risk.
In this experiment, the turbine rotation speed was slower than the fish swimming speed, so fish could easily avoid the turbine. Therefore, there was a tendency to approach it. Meanwhile, in dark conditions, it is possible that, due to the presence of the turbine itself, fish became more vigilant because it was not possible to visually detect the turbine. Under dark conditions, it is thought that turbine detection mainly occurs due to alternative sensory modes detecting changes in pressure, flow, or sound; therefore, the number of fish that approached the vicinity of the turbine decreased, as the fish were less reliant on visual cues.
Previous field research has shown that fish may have shorter detection distances for turbines at night than during the day; thus, they tend to perceive the existence of turbines later [6]. Previous studies have also reported that collision risk may increase due reduced visibility at night; however, this study showed that fish may reduce the behavior of approaching the turbine blades when visibility is poor, and therefore, may not experience increased collision risk at night.
4 Conclusion
A water tank test under bright conditions was carried out to examine the behavior of three species of fish, Oryzias latipes, Gnathopogon elongatus, and Rhodeus ocellatus ocellatus, near a model of a rotating turbine to show the differences in fish characteristics across the three species. It is difficult to detect collisions between fish and rotating turbine blades in the field due to instrument limitations. Echosounders are used to monitor presence of fish, and multibeam sonar used to monitor movement and behavior of fish, but these techniques lack the resolution and detail to observe direct collisions. Recent advances (e.g. acoustic video camera) have high enough resolution with 3 mm/pixel to monitor fish behavior; however, these sensors are costly. Cameras are inexpensive; however, they can only be used when visibility or illumination permit. Thus laboratory-scale experiments with cameras can be used to better understand fish fine-scale behavior and response around turbines, which can then be extrapolated to field conditions.
In this paper, Gnathopogon elongatus was selected to investigate differences between bright and dark conditions, as this species showed active behavior near the rotating turbine blades during experiments with bright conditions. Approaching the turbine blades was observed more often in bright conditions than in dark, while returning from the turbine was observed more often in dark conditions. In dark conditions, alertness may have increased due to the inability to visually detect the turbine blades. In this study, we used a single fish species to observe behavior under dark conditions, but additional fish species should be studied in the future to be able to generalize responses to species found in field sites.
This study showed the result of fish considered to equate to length of 0.25–0.35 m in field sites due to the principles of scaling; however, smaller fish are also detected in the field [6], with corresponding slower swim speeds. In particular, as flow in the ocean is faster than the swimming speed of small fish, variation in light and dark conditions where the swimming speeds of fish are slower may increase the risk of collision. Additional experiments for different corresponding swim speeds and turbine rotation speeds are planned in the future. Bridging the gap between laboratory-scale experimental studies and field observations around operational tidal stream turbines within the limitations of sensor technology are important next steps to better understand the potential for animal collision risk.
References
Copping A, Sather N, Hanna L, Whiting J, Zydlewski G, Staines G, Gill A, Hutchison I, O’Hagan A, Simas T, Bald J, Sparling C, Wood J, Masden E (2016). Annex IV 2016 State of the Science Report: Environmental Effects of Marine Renewable Energy Development Around the World, pp 224
Copping AE and Hemery LG (2020). OES-Environmental 2020 State of the Science Report: Environmental Effects of Marine Renewable Energy Development Around the World. Report for Ocean Energy Systems (OES). https://doi.org/10.2172/1632878
Bevelhimer M, Scherelis C, Colby J, Adonizio MA (2017) Hydroacoustic assessment of behavioral responses by fish passing near an operating tidal turbine in the east river, New York. Trans Am Fish Soc 146:1028–1042. https://doi.org/10.1080/00028487.2017.1339637
Schramm MP, Bevelhimer M, Scherelis C (2017) Effects of hydrokinetic turbine sound on the behavior of four species of fish within an experimental mesocosm. Fish Res 190:1–14. https://doi.org/10.1016/j.fishres.2017.01.012
Viehman HA, Zydlewski GB, McCleave JD, Staines GJ (2014) Using hydroacoustics to understand fish presence and vertical distribution in a tidally dynamic region targeted for energy extraction. Estuaries Coasts 38:215–226. https://doi.org/10.1007/s12237-014-9776-7
Viehman HA, Zydlewski GB (2015) Fish interactions with a commercial-scale tidal energy device in the natural environment. Estuaries Coasts 38:241–252. https://doi.org/10.1007/s12237-014-9767-8
Viehman HA, Zydlewski GB (2017) Multi-scale temporal patterns in fish presence in a high velocity tidal channel. PLoS ONE 12:1–20. https://doi.org/10.1371/journal.pone.0176405
Shen H, Zydlewski GB, Viehman HA, Staines G (2016) Estimating the probability of fish encountering a marine hydrokinetic device. Renew Energy 97:746–756. https://doi.org/10.1016/j.renene.2016.06.026
Staines G, Zydlewski G, Viehman H (2019) Changes in relative fish density around a deployed tidal turbine during on-water activities. Sustainability 11:1–12. https://doi.org/10.3390/su11226262
Taormina B, Laurans M, Marzloff MP et al (2020) Renewable energy homes for marine life: habitat potential of a tidal energy project for benthic megafauna. Mar Environ Res. https://doi.org/10.1016/j.marenvres.2020.105131
Williamson BJ, Fraser S, Blondel P et al (2017) Multisensor acoustic tracking of fish and seabird behavior around tidal turbine structures in Scotland. IEEE J Ocean Eng 42:948–965. https://doi.org/10.1109/JOE.2016.2637179
Williamson B, Fraser S, Williamson L et al (2019) Predictable changes in fish school characteristics due to a tidal turbine support structure. Renew Energy 141:1092–1102. https://doi.org/10.1016/j.renene.2019.04.065
Williamson BJ, Blondel P, Williamson LD, Scott BE (2021) Application of a multibeam echosounder to document changes in animal movement and behaviour around a tidal turbine structure. ICES J Mar Sci 78:1253–1266. https://doi.org/10.1093/icesjms/fsab017
Krone R, Dederer G, Kanstinger P et al (2017) Mobile demersal megafauna at common offshore wind turbine foundations in the German Bight (North Sea) two years after deployment—increased production rate of Cancer pagurus. Mar Environ Res 123:53–61. https://doi.org/10.1016/j.marenvres.2016.11.011
Langhamer O, Holand H, Rosenqvist G (2016) Effects of an Offshore Wind Farm (OWF) on the common shore crab Carcinus maenas: tagging pilot experiments in the Lillgrund Offshore Wind Farm (Sweden). PLoS ONE 11:1–17. https://doi.org/10.1371/journal.pone.0165096
van Hal R, Griffioen AB, van Keeken OA (2017) Changes in fish communities on a small spatial scale, an effect of increased habitat complexity by an offshore wind farm. Mar Environ Res 126:26–36. https://doi.org/10.1016/j.marenvres.2017.01.009
Wilber DH, Carey DA, Griffin M (2018) Flatfish habitat use near North America’s first offshore wind farm. J Sea Res 139:24–32. https://doi.org/10.1016/j.seares.2018.06.004
Wright SR, Lynam CP, Righton DA et al (2020) Structure in a sea of sand: fish abundance in relation to man-made structures in the North Sea. ICES J Mar Sci 77:1206–1218. https://doi.org/10.1093/icesjms/fsy142
Langhamer O, Wilhelmsson D (2009) Colonisation of fish and crabs of wave energy foundations and the effects of manufactured holes—a field experiment. Mar Environ Res 68:151–157. https://doi.org/10.1016/j.marenvres.2009.06.003
Bender A, Langhamer O, Sundberg J (2020) Colonisation of wave power foundations by mobile mega- and macrofauna—a 12 year study. Mar Environ Res 161:105053. https://doi.org/10.1016/j.marenvres.2020.105053
Todd VLG, Williamson LD, Cox SE et al (2020) Characterizing the first wave of fish and invertebrate colonization on a new offshore petroleum platform. ICES J Mar Sci 77:1127–1136. https://doi.org/10.1093/icesjms/fsz077
Todd VLG, Susini I, Williamson LD et al (2021) Characterizing the second wave of fish and invertebrate colonization of an offshore petroleum platform. ICES J Mar Sci 78:1253–1266. https://doi.org/10.1093/icesjms/fsaa245
Meyer-Gutbrod EL, Kui L, Nishimoto MM et al (2019) Fish densities associated with structural elements of oil and gas platforms in southern California. Bull Mar Sci 95:639–656. https://doi.org/10.5343/bms.2018.0078
Schutter M, Dorenbosch M, Driessen FMF et al (2019) Oil and gas platforms as artificial substrates for epibenthic North Sea fauna: effects of location and depth. J Sea Res 153:101782. https://doi.org/10.1016/j.seares.2019.101782
Amaral S, Perkins N, Giza D, McMahon B (2011) Evaluation of fish injury and mortality associated with hydrokinetic turbines (Report No. 1024569), Report by Alden Research Laboratory. Report for Electric Power Research Institute (EPRI)
Amaral S, Giza D, McMahon B (2014) Evaluation of survival and behavior of fish exposed to an axial-flow hydrokinetic turbine (Report No. 3002003911), Report by Alden Research Laboratory. Report for Electric Power Research Institute (EPRI)
Castro-Santos T, Haro A (2013) Survival and behavioral effects of exposure to a hydrokinetic turbine on juvenile Atlantic Salmon and adult American Shad. Estuaries Coasts 38:203–214. https://doi.org/10.1007/s12237-013-9680-6
Taya S (2015) Behavioral assessment of marine animals subjected to hydrokinetic turbines. Master thesis, Univ Tokyo
Zhang J, Kitazawa D, Taya S, Mizukami Y (2017) Impact assessment of marine current turbines on fish behavior using an experimental approach based on the similarity law. J Mar Sci Technol 22:219–230. https://doi.org/10.1007/s00773-016-0405-y
Yoshida T, Zhou J, Park S et al (2020) Use of a model turbine to investigate the high striking risk of fish with tidal and oceanic current turbine blades under slow rotational speed. Sustain Energy Technol Assess 37:100634. https://doi.org/10.1016/j.seta.2020.100634
Triantafyllou GS, Triantafyllou MS, Grosenbaugh MA (1993) Optimal thrust development in oscillating foils with application to fish propulsion. J Fluids Struct 7:205–224
Bainbridge BYR (1958) The speed of swimming of fish as related to size and to the frequency and amplitude of the tail beat. J Exp Biol 35:109–133
Acknowledgements
This study was supported by a collaborative research program of The Japan Society of Naval Architects and Ocean Engineers (JASNAOE). We gratefully acknowledge the constructive comments from reviewers.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no conflicts of interest to declare.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About this article

Cite this article
Yoshida, T., Furuichi, D., Williamson, B. et al. Experimental study of fish behavior near a tidal turbine model under dark conditions. J Mar Sci Technol 27, 541–548 (2022). https://doi.org/10.1007/s00773-021-00850-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-021-00850-w