
Abstract
There is significant international interest in developing current-based marine and hydrokinetic (MHK) technologies to capture the power of tidal energy. However, concerns have been raised regarding the ecological effects of these projects on fish, including the risk of blade collision and behavioral impacts such as the disruption of migratory behavior and food acquisition and displacement from preferred habitats. We conducted mobile hydroacoustic surveys to track fish as they approached a tidal turbine deployed in Cobscook Bay, Maine. There was a significant decline in fish numbers with decreasing distance to the turbine, beginning approximately 140 m from the turbine. Similar declines were not observed at control transects or when the turbine was not spinning. The decline in fish numbers appeared to be the result of horizontal displacement, not vertical, movements to avoid the turbine. Noise rather than visual cues or flow field disturbance seemed to be a likely explanation for the reduced number of fish near the turbine. This finding, combined with near-field blade collision studies indicating a low probability of encounter, suggests that a single turbine poses a low collision risk to pelagic fish and that a single turbine is likely to result in minimal behavioral responses by fish. However, the risk may be different with additional devices, which will become more relevant as commercial-scale MHK arrays come under consideration. Therefore, the risks associated with commercial-scale operations will ultimately have to be evaluated to fully understand the ecological impacts of MHK devices.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
In recent years, there has been significant international interest in developing current-based marine and hydrokinetic (MHK) technologies to capture the power of tidal energy resources. In an analysis of tidal energy potential in the USA, the USDOE estimated the technical tidal energy potential in the USA to be 222–334 TWh/year (US Department of Energy 2009). However, concerns have been raised regarding the effects of these projects on the physical and biological environment. Determining the potential impacts of MHK devices on fish behavior is critical to addressing the environmental concerns. For example, several potential fish behavioral risks have been identified for tidal turbines including the disruption of migratory behavior and food acquisition, behavioral attraction to the device, and avoidance of preferred habitat occupied by the device (Boehlert and Gill 2010; Polagye et al. 2010; Frid et al. 2011; Hammar et al. 2013).
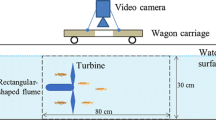
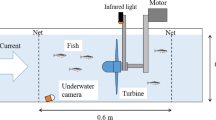
Fish collision with turbine blades has also been identified as a primary concern associated with the operation of tidal turbines (US Department of Energy 2009). There have been multiple blade collision studies conducted in laboratory settings using fish exposed to turbines in a confined channel (Amaral et al. 2015; Castro-Santos and Haro 2015). While these studies indicate fish can avoid blade collision if they swim through a turbine, they do not address what proportion of fish will avoid the turbine completely while swimming through a natural channel. This question is critical in assessing the actual risk of collision with the turbine blades (Hammar et al. 2015). Earlier work in our study area (Viehman and Zydlewski 2014) attempted to address the blade collision data gap by using dual-frequency identification sonar (DIDSON) to monitor fish movement within a few meters of the Ocean Renewable Power Company (ORPC) turbine generating unit (TGU). However, fish were not observed to have collided with the turbine blades.
Shen et al. (2016) examined fish behavior around ORPC’s OCGen® prototype and combined those data with previously collected data to determine the probability of encountering a turbine in Cobscook Bay Maine. They found the probability of fish being present at the same depth as the turbine blades was 0.079 to 0.093 (Shen et al. 2016). Here, we more thoroughly examine the data collected during the OCGen® prototype monitoring to evaluate the magnitude and ecological significance of fish behavioral responses and investigate the potential turbine-related variables driving the observed behavioral responses. Detecting fish behavioral responses to turbines as well as determining the reason for any behavioral changes is key to assessing risk and subsequent mitigation associated with this technology.
Methods
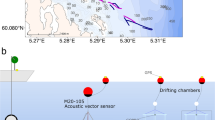
The study was conducted in Cobscook Bay, Maine (Fig. 1), which is characterized by strong currents and approximately 10 m, daily tidal fluctuations. Over the course of the study, two tidal turbines were deployed. The bottom-mounted ORPC TidGen® power system (TidGen®) was deployed in 2013. However, in spring 2013, the TidGen® foils and generator were removed from Cobscook Bay and the TidGen® was replaced with the bottom-moored OCGen® power system (OCGen). The bottom-mounted, solid steel frame of the TidGen®, which was 31.2-m long and 15.2-m wide, remained on the seafloor during the OCGen survey period.

Map of Cobscook Bay, Maine, with locations of the project and control sites for fish-MHK interaction research
The OCGen was moored to the seafloor with gravity anchors and cables (Fig. 2). The entire OCGen system (float and foils) was 5.1-m high and 19.7-m long. The distance of the OCGen to the seafloor varied with the tidal stage, ranging from 5.9 m to 8.4 m during maximum flow. The center location of the OCGen was about 100 m seaward from the center location of the TidGen® bottom support frame.

Schematic representation of the TidGen® (9.5 × 31.2 × 15.2 m) and OCGen (5.1 × 19.7 × 5.3 m) power systems that ORPC installed in outer Cobscook Bay, Maine. Only the bottom mount of the TidGen® system was present during the 2014 mobile hydroacoustic fish surveys over the OCGen power system
Mobile hydroacoustic fish surveys
We conducted mobile hydroacoustic surveys to determine the position and movement of fish as they approached the OCGen. The surveys were initiated after the OCGen was deployed in late July 2014 (Table 1). The mobile down-looking hydroacoustic surveys consisted of drifing with the current (with the engine not in gear) from 200-m upstream to 200-m downstream of the OCGen® allowing the observation of fish numbers upstream, over, and downstream of the OCGen. Control transect surveys were also conducted on both sides of the OCGen. During each survey period, we typically conducted more than 100 mobile hydroacoustic surveys (Table 1). Surveys were conducted using a Simrad EK60 split-beam echosounder.
Only data collected during flood tides were used in the analysis because the TidGen® bottom support frame could have potentially affected fish behavior as the fish approached the OCGen during ebb tides (Fig. 3). Because the seafloor sloped upward as the boat approached the device during the flood tide, fish tracks deeper than 30 m from the sea surface (Fig. 3) were excluded to ensure an equal amount of water was sampled across the length of a transect.

A mobile transect over the OCGen power system and the TidGen® bottom support frame during a flood tide
Following hydroacoustic data collection, the data were processed (using EchoView 6.1, Myriax, Hobart, Australia) into fish positions based on tracks. The survey transect was binned into 10-m distance segments, and the relationship between the number of fish tracks in the 10-m bin (sum of all surveys) and the distance to the turbine was determined using a simple linear regression. Turbine avoidance was classified as a decrease in the number of fish tracks with decreasing distance to the OCGen. A complete description of the hydroacoustic surveys and data processing is provided in Shen et al. (2016).
After the surveys were completed, we discovered that the OCGen was freespinning (rotating but not generating power) during the surveys conducted from July 29 to August 3 and that during the August 13 to August 16 survey, the turbine was in a static operational condition and was not spinning (Table 1). This operational variation allowed us to examine the relationship between fish numbers and the operational status of the turbine.
Analysis of possible mechanisms affecting fish distributions
Both sight and sound were explored as stimuli affecting fish response to the turbine. The significance of turbine-associated visual stimuli was investigated by examining differences in fish numbers between fish survey data collected during the day and data collected at night. The turbine would presumably be visible to fish at a greater distance during the day compared with night. Therefore, differences in fish numbers approaching the turbine between day and night might indicate a visual stimuli effect. Fish response to turbine-generated noise was investigated by examining differences in fish behavior between data collected while the turbine was freespinning (July to early August 2014) versus when it was static (mid-August 2014). Based on prior acoustic monitoring of the TidGen® (ORPC 2014), we assumed that the OCGen would produce significantly less noise when static compared with when it was freespinning.
Results
There was a significant negative relationship between the number of fish tracks within the 10-m distance bins and the distance to the OCGen (y = − 0.5093x + 103.78; R2 = 0.86), when the turbine was freespinning. The number of fish tracks began decreasing approximately 140-m upstream of the OCGen (Fig. 4a), and there was a 37.2% (95% CIs: [21.8%, 49.4%]) decrease in the number of fish between 140- and 10-m upstream of the OCGen. The significant decrease in fish tracks approaching the spinning turbine was found for both daytime (R2 = 0.7402; p < 0.001) and nighttime (R2 = 0.7648; p < 0.001) surveys (Fig. 5 a and b). No relationship between the number of fish tracks and the distance to the OCGen was found for control transects (Fig. 4b), or control transects parsed by day (Fig. 5c) or night (Fig. 5d). The proportion of fish 0–10 m above the seafloor (the approximate depth of the OCGen) relative to the number of fish in the entire water column showed little variation across the survey transect (Shen et al. 2016), indicating the decrease in the number of fish tracks between 140 and 10 m is the result of a change in horizontal rather than vertical movement as they approach the device.

(a) The relationship between the number of fish tracks and the distance of the track to the OCGen while the turbine was freespinning and (b) the number of fish tracks versus the distance to the theoretical location of the OCGen at control transects. The data points represent the total number of fish tracks (sum of all surveys) in each of the 10 m distance intervals between 200 and 20 m from the OCGen

The relationship between the number of fish tracks and the distance of the track to the OCGen when the turbine was freespinning during (a) daytime and (b) nighttime surveys and (c and d) at control transects. The data points represent the total number of fish tracks (sum of all surveys) in each of the 10 m distance intervals between 200 and 20 m from the OCGen
For surveys conducted in mid-August, when the turbine was static, there was a weak relationship (p = 0.0357) between the number of fish tracks and the distance to the OCGen (Fig. 6a). This weak relationship was present in daytime survey data (p = 0.0154), but not for nighttime survey data (Fig. 6a). A similarly weak relationship was observed at control transect surveys conducted during the static turbine period for nighttime surveys (p = 0.02557), but not daytime surveys (p = 0.3031) (Fig. 6 b and c).

The relationship between the number of fish tracks and the distance of the track to the OCGen when the turbine was static (a) during daytime and nighttime at turbine transects and at control transects (b and c). The data points represent the total number of fish tracks (sum of all surveys) in each of the 10 m distance intervals between 200 and 20 m from the OCGen
Discussion
The key finding of the hydroacoustic surveys was that there was a significant decline in fish numbers with decreasing distance to the OCGen. Bevelhimer et al. (2017) and Matzner et al. (2017) also found fish avoided hydrokinetic turbines when operational. While Williamson et al. (2019) found more fish schools were present around MHK structures compared with control areas, only the bladeless turbine infrastructure was present. We only found avoidance behavior when the turbine was operational. In contrast to our results, Bevelhimer et al. (2017) found fewer fish present at the MHK site in both the operational and non-operational condition.
Because of the uneven bathymetry, fish track counts only included the top 30 m of the water column between 200 and 50 m from the OCGen to equalize the amount of water column surveyed across the transect (Fig. 3). This meant that fish less than 30 m from the sea surface were not counted except in the final 50 m of the transect nearest the turbine. If fish in the lower water column were relatively abundant compared with fish higher in the water column, this could have led to an underestimate of fish numbers between 200 and 50 m from the turbine. However, if this were true, there would have been a spike in fish numbers from 50 m to the turbine, when bottom fish were included in the fish track counts. In fact, however, the decrease in the number of fish tracks continued all the way to the turbine, suggesting that excluding fish in the lower 30 m did not significantly affect the results.
Explanations for avoidance behavior
In contrast to surveys conducted while the turbine was freespinning, there was a weak or non-existent relationship between the number of fish tracks and the distance from the OCGen for transects surveys conducted while the turbine was static. These results support the hypothesis that stimuli produced by the spinning turbine (e.g., noise, visual cues) could potentially explain the decrease in fish tracks along the survey transect when the turbine was spinning. We investigated three potential OCGen related explanations for the observed avoidance behavior: (1) noise generated by the turbine, (2) visual stimuli generated by the turbine, and (3) anecdotal evidence of turbine-generated disturbances in flow patterns in the channel.
Noise
The ability of fish to detect turbine noise is related to the hearing sensitivity of the fish, the sound produced by the MHK technology, and the ambient noise generated by existing natural processes or human activity within the area. By necessity, MHK devices are placed in areas like Cobscook Bay that have high flow and turbulence. This placement may reduce the ability of fish to detect noise from the turbine, because ambient noise increases with tidal flow (Willis et al. 2013). In our study, fish counts began to decline approximately 140 m from the OCGen when it was freespinning. Therefore, if noise is the source of the avoidance behavior, the noise from the OCGen would have to be of sufficient levels to elicit avoidance at a distance of 140 m. No noise studies are available for the OCGen that could be used to determine noise levels at incremental distances from the turbine. However, ORPC has previously measured noise generated by a test turbine, the commercial-scale TidGen® system, which is much larger than the OCGen (ORPC 2011, 2014). For the test turbine, there was an increase of up to 35 dB re 1 μPa2/Hz above the ambient background noise level 68 m from the turbine, (ORPC 2011) and sound pressure levels from the turbine were below 100 dB re 1 μPa2/Hz, even at the maximum rotational speed (ORPC 2011). Considering these results were for the smaller test unit, the noise levels and distance the sound traveled are likely greater for the commercial-scale OCGen.
The in-water sound peaks associated with the TidGen® were less than 120 dB re 1 μPa2/Hz at all measured frequencies. This was true when the turbine-generated power and when freespinning (ORPC 2014). Measurements taken at 154 m from the TidGen® indicate that at frequencies around 100 Hz, the turbine generated the highest noise levels, or slightly over 100 dB re 1 μPa2/Hz (ORPC 2014). Although these noise levels would not be injurious to fish, multi-species studies suggest that fish would be able to detect sounds within this frequency and noise level (Popper and Hastings 2009). While the TidGen® is larger than the OCGen, 154 m is similar to the 140 m at which the avoidance behavior was observed in this study.
The role of species specific hearing sensitivity was also examined. Pelagic and benthic trawl samples from the study area indicated that Atlantic mackerel (Scomber scombrus) and Atlantic herring (Clupea harengus) were the pelagic species most likely to be interacting with the OCGen (Shen et al. 2016). Clupeids, such as the Atlantic herring, are known to be sensitive to noise (Popper and Hastings 2009), while mackerel are likely less sensitive to noise because they lack a swim bladder (Hawkins and Popper 2014).
Visual cues
Another explanation for the avoidance behavior observed near the OCGen is that fish were able to see the turbine as they approached, and therefore change their swimming direction. Near-field (< 5 m from the turbine) DIDSON studies of fish interaction with an ORPC TidGen® indicated that fish that passed through the turbine generally did so at night rather than during the day (Viehman et al. 2014), suggesting that fish behavior changed because they may have seen the turbine during the day. Other field studies also suggest that the increase in turbine visibility near-field reduces fish interactions with turbines (Hammar et al. 2013).
However, while sight may have played a role in near-field studies, it is unlikely fish would be able to see the turbine from a distance of 140 m where avoidance behavior was observed. To confirm, we investigated whether there were differences in fish tracks between transects conducted at night versus the day, with diurnal differences indicating a visual response to the turbine. We found the decline in the number of fish tracks with decreasing distance to the turbine was significant for both day and night surveys, and, most importantly, the decline in fish tracks began at approximately 140 m from the turbine during both day and night. These results suggest that visual stimuli were not the source of the avoidance behavior.
Turbine-related hydrodynamic changes
Although a quantitative analysis was not conducted, preliminary hydrodynamic simulations of Cobscook Bay indicated that the project site has very high natural turbulence and that hydrodynamic disturbance from the OCGen was likely small and restricted to the vicinity of the OCGen (unpublished data). Therefore, we conclude that turbine-related hydrodynamic stimuli were not likely to be responsible for the observed avoidance behavior at 140 m from the OCGen.
Turbines are purposely placed in areas of high flow in order to optimize power generation. Therefore, our results may not be atypical of tidal MHK projects. If so, behavioral responses of fish resulting from hydrodynamic alterations may be minor and localized for single MHK device deployments. However, economically viable MHK deployments will ultimately require the deployment of additional devices in an array, which would likely increase the magnitude of hydrodynamic change.
Ecological implications of findings
As demonstrated by this study, MHK devices have the potential to alter the behavior of individual fish that move within the vicinity of the device while it is in operation. Of further interest is whether these behavioral changes could result in ecologically meaningful impacts such as the disruption of spawning and migratory runs. For species that do interact with an MHK device, fish colliding with the turbine blades is of significant concern to regulators. As described below, the results of this study suggest that the risk of significant ecological impacts is low for a single MHK device.
Disruption of fish movement
Our finding that fish numbers decrease with closing distance to a single turbine is similar to findings in other systems. Hammar et al. (2013) used underwater video to record fish movement through a narrow tidal channel. They found that passage through the channel was significantly lower for 6 of the 16 genera recorded when the turbine was present, compared with when it was absent from the channel. The passage rate was negatively related to water velocity, but only when the turbine was present, indicating that the decrease in passage was due to the higher rotational speeds of the turbine, not the water velocity itself (Hammar et al. 2013). However, fish that passed through the channel avoided the turbine by only 0.3 to 1.7 m, indicating minimal disruption of movement and energetic cost to the fish. Similarly, our results suggest it is unlikely that a single turbine deployment in Cobscook Bay would pose a significant fitness cost to juvenile or adult fish or disrupt ecologically significant life-history activities such as migration and spawning for those detected during this time of year.
Most MHK project development plans include the deployment of an array of turbines, which increases the potential for hydrodynamic disturbance and subsequent behavioral changes over a large portion of the deployment site (Hammar et al. 2013). These impacts can be mitigated to some degree by turbine placement in areas where fish are less likely to be present.
Collision
As summarized in Table 2, existing collision studies do not suggest a significant risk for fish from direct blades strike. Near-field studies of fish interactions with the TidGen® using a DIDSON acoustic camera indicated that few fish entered the device while it was static, and the number of fish entering the turbine decreased by 35% when the turbine was rotating (Viehman and Zydlewski 2014). For fish that do pass through an MHK device, recent studies in laboratory and natural settings suggest a low potential for injury and mortality from blade collision, except in the case of early larval stages of fish (Table 2). For example, in studies in a narrow tidal channel, Hammar et al. (2013) recorded only two individuals entering the turbine rotor and no individuals were observed being hit by the blade. They also found that fish passage through a tidal channel was negatively related to the rotational velocity of the turbine, which would likely reduce the probability a turbine blade actually striking a fish.
For mid-field and far-field interactions, whether the MHK device is located in the habitat preferred by the species is a significant factor in the probability of a fish-turbine encounter. Most studies suggest that a significant number of interactions are unlikely because the locations or time periods in which the turbines typically operate are generally not suitable for aquatic organisms. As reported in Viehman et al. (2014) and Shen et al. (2016), the probability of fish being present in the same location as the proposed TidGen® deployment was generally between 0.5 and 0.8 in all seasons and tidal conditions. However, the probability of the fish being at the same depth as the turbine blades was much lower, ranging from 0.079 to 0.093 (Shen et al. 2016).
This study significantly expands the range of earlier near-field blade collision and DIDSON studies by observing fish behavioral changes as they approached the device over hundreds of meters. The results of this study indicate that fish in Cobscook Bay begin to avoid the OCGen at 140 m from the device, further reducing the probability fish will physically interact with the device. This finding combined with near-field blade collision studies indicating low risk for juvenile and adult fish suggests that a single OCGen poses a minimal risk to pelagic fish.
Conclusions
Impacts to fish communities have long been a primary concern related to the deployment of hydrokinetic technology (Sparling et al. 2020). This study provides important data regarding behavioral interactions of fish with hydrokinetic turbines, as there are currently few field studies of fish interactions with operational systems (Sparling et al. 2020). The key finding of the hydroacoustic surveys was that fish appeared to avoid the OCGen, while the turbine was operational. Of the other potential explanations evaluated, noise appeared to be the most plausible explanation for the avoidance behavior. However, several uncertainties remain and additional data are needed on the distance at which noise generated by MHK devices are detected by specific fish species, and fish responses to turbine-related disturbance to the flow field (Sparling et al. 2020).
Overall, this study provides additional confirmation that a single turbine is likely to have negligible impacts to fish communities. Assuming that the observed fish avoidance behavior was related to the OCGen, the installation of turbines in the strong current zones that fish may tend to avoid may minimize the potential for displacing fish from areas where they were most abundant. In addition, the turbine elicited the avoidance behavior, which would minimize the already low probability of fish colliding with the turbine blade revealed in near-field laboratory studies.
While existing data suggest small, localized ecological risk to fish from a single MHK device, the risk may increase with additional devices. This will become more relevant as commercial-scale MHK arrays come under consideration by regulators. Therefore, the ecological risks associated with commercial-scale operations will ultimately have to be evaluated to fully understand the ecological impacts of MHK devices.
Data availability (data transparency)
Available on request.
References
Amaral, S., Bevelhimer, M., Cada, G., Giza, D., Jacobson, P., McMahon, B., & Pracheil, B. (2015). Evaluation of behavior and survival of fish exposed to an axial-flow hydrokinetic turbine. North American Journal of Fisheries Management, 35, 97–113.
Bevelhimer, M., Scherelis, C., Colby, J., & Adonizio, M. A. (2017). Hydroacoustic assessment of behavioral responses by fish passing near an operating tidal turbine in the East River, New York. Transactions of the American Fisheries Society, 146, 1028–1042.
Boehlert, G. W., & Gill, A. B. (2010). Environmental and ecological effects of ocean renewable energy development: a current synthesis. Oceanography, 23, 68–81.
Castro-Santos, T., & Haro, A. (2015). Survival and behavioral effects of exposure to a hydrokinetic turbine on juvenile Atlantic salmon and adult American shad. Estuaries and Coasts, 38, 203–214.
Frid, C., Andonegi, E., Depestele, J., Judd, A., Rihan, D., Rogers, S. I., & Kenchington, E. (2011). The environmental interactions of tidal and wave energy generation devices. Environmental Impact Assessment Review, 32, 133–139.
Hammar, L., Andersson, S., Eggertsen, L., Haglund, J., Gullström, M., Ehnberg, J., & Molander, S. (2013). Hydrokinetic turbine effects on fish swimming behaviour. PLoS One, 8, 1–12.
Hammar L., L. Eggertsen, S. Andersson, J. Ehnberg, R. Arvidsson, M, Gullström M. Gullström, S. Molander (2015) A probabilistic model for hydrokinetic turbine collision risks: exploring impacts on fish. PLoS One 10(3): e0117756. https://doi.org/10.1371/journal.pone.0117756.
Hawkins, A. D., & Popper, A. N. (2014). Assessing the impacts of underwater sounds on fishes and other forms of marine life. Acoustics Today, 10, 30–41.
Jacobson, P. T. (2011). Assessment of the environmental effects of hydrokinetic turbines on fish: desktop and laboratory flume studies. Webinar presentation sponsored by the U.S. Department of Energy, Aug. 29.
Matzner, S., Trostle, C., Staines, G., Hull, R., Avila, A., & Harker-Klimeš, G. (2017). Triton: Igiugig fish video analysis. Project Report. Prepared for the U.S. Department of Energy by Pacific Northwest National Laboratory.
Normandeau Associates, Inc. (2009). An estimation of survival and injury of fish passed through the hydro green energy hydrokinetic system, and a characterization of fish entrainment potential at the Mississippi River lock and dam no. 2 hydroelectric project (P-4306), Final Report, Hastings Minnesota, Hydro Green Energy, LLC.
ORPC. (2014). Cobscook Bay tidal energy project (P-12711-005), 2013 Environmental Monitoring Report. Available at: https://tethys.pnnl.gov/publications/cobscook-bay-tidal-energy-project-2013-environmental-monitoring-report.
ORPC (Ocean Renewable Power Company). (2011). Underwater noise measurements of a proposed tidal generator site in Cobscook Bay using a drifting noise measurement buoy, including ambient noise and estimates of tidal generator noise, Cook Inlet (Fire Island) Tidal Energy Project, P-12679-003, Progress Report No. 2.
Polagye, B., Van Cleve, B., Copping, A., & Kirkendall, K., ed. (2010). Environmental effects of tidal energy development. Proceedings of U.S. Department of Commerce National Oceanic and Atmospheric Association scientific workshop, March 22–25.
Popper, A.N., and M.C. Hastings (2009). The effects of anthropogenic sources of sound on fishes,” Journal of Fish Biology 75:455–489.
Schweizer, P. E., Cada, G. F., & Bevelhimer, M. S. (2012). Laboratory experiments on the effects of blade strike from hydrokinetic energy technologies on larval and juvenile freshwater fishes. Oak Ridge National Laboratory ORNL/TM-2010/108.
Shen, H., Zydlewski, G. B., Viehman, H. A., & Staines, G. (2016). Estimating the probability of fish encountering a marine hydrokinetic device. Renewable Energy, 97, 746–756.
Sparling, C., Seitz, A. C., Masden, E., & Smith, K. (2020). Collision risk for animals around turbines. Chapter 3. In A. E. Copping & L. G. Hemery (Eds.), OES-environmental 2020 state of the science report: environmental effects of marine renewable energy development around the world. Report for Ocean Energy Systems (OES).
U.S. Department of Energy. (2009). Report to Congress on the Potential Environmental Effects of Marine and Hydrokinetic Energy Technologies, Wind and Hydropower Technologies Program. Available at: http://energy.gov/sites/prod/files/2013/12/f5/doe_eisa_633b.pdf.
Verdant Power. (2010). Roosevelt Island Tidal Energy Project: FERC No. 12611. 4 vols. Available at: http://www.theriteproject.com/Documents.html.
Viehman, H. A., & Zydlewski, G. B. (2014). Fish interactions with a commercial-scale tidal energy device in the natural environment. Estuaries and Coasts, 38, S241–S252.
Viehman, H. A., Zydlewski, G. B., McCleave, J. D., & Staines, G. J. (2014). Using hydroacoustics to understand fish presence and vertical distribution in a tidally dynamic region targeted for energy extraction. Estuaries and Coasts, 38, S215–S226.
Williamson, B., Fraser, S., Williamson, L., Nikor, V., & Scott, B. (2019). Predictable changes in fish school characteristics due to a tidal turbine support structure. Renewable Energy, 141, 1092–1102.
Willis, M. R., Broudic, M., Haywood, C., Masters, I., & Thomas, S. (2013). Measuring underwater background noise in high tidal flow environments. Renewable Energy, 49, 255–258.
Acknowledgments
We would like to thank the Department of Energy Office of Energy Efficiency and Renewable Energy.
Funding
Funding for this project was provided by the US Department of Energy, Office of Energy Efficiency & Renewable Energy.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Grippo, M., Zydlewski, G., Shen, H. et al. Behavioral responses of fish to a current-based hydrokinetic turbine under mutliple operational conditions. Environ Monit Assess 192, 645 (2020). https://doi.org/10.1007/s10661-020-08596-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10661-020-08596-5