
Abstract
The subject of the paper are homogeneous beams of symmetrically variable depth and bisymmetrical cross sections. Free flexural vibrations of these beams are analytically and numerically studied. Based on Hamilton’s principle, the differential equations of motion of these beams are obtained. The equations of motion are analytically solved with consideration of the bending lines of these beams subjected to their own weight. The fundamental natural frequency for exemplary beams is derived and presented in Tables and Figures.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The variable depth beams are widely used, especially in building structures and transportation machinery. The vibration problems of these structures are significant for safety during their operation. Carrera et al. [1] proposed a new original unified approach to beam theory that includes practically all classical and advanced models for beams. According to the Carrera unified formulation (CUF), the error can be reduced by increasing the number of unknown variables. It is suitable for computer implementations and can deal with the most typical engineering challenges. The objective of the Ganesan and Zabihollah works [2, 3] was to perform an investigation of the free undamped vibration response of tapered composite beams, using the finite element method (a higher-order finite element formulation was developed). The finite element method was also used by Shahba et al. [4] for the structural analysis of axially functionally graded tapered Euler–Bernoulli beams. A beam element was proposed which takes advantage of the shape functions of homogeneous uniform beam elements. El-Sayed and El-Mongy [5] applied the modified variational iteration method (VIM) to solve the free vibration problem of a tapered Euler–Bernoulli beam mounted on two degrees of freedom mass-spring-damper subsystems. Both conical and wedge beams were investigated. Viglietti et al. [6] presented the free vibration analysis of tapered aircraft structures made of composite and metallic materials, taking into account global and local damage. A refined one-dimensional model was used to describe the structure in detail. Multicomponent aeronautical structures were modeled adopting Lagrange polynomials to evaluate the displacement field over the cross section. The model was assessed by comparing the results with classical FE models. The authors provided an accurate solution for the free vibration analyses of complex structures and are able to predict the consequences of global or local failure of a structural component. Banerjee and Ananthapuvirajah [7] investigated the free flexural vibration behaviour of a range of tapered beams by making use of the exact solutions of the governing differential equations and then imposing the necessary boundary conditions. It has been pointed out that an exact solution for the problem is possible by using Bessel functions rather than relying on a series solution which is somehow unnecessary and inefficient from a computational point of view. In another paper, Magnucki et al. [8] presented a three-point bending of an expanded-tapered beam with a rectangular cross section. The analytical model of the beam was formulated with consideration of a non-linear hypothesis of the cross-section deformation. The problem of shear stress distribution in the beam was analyzed. Zhou and Cheung [9] studied the vibrational characteristics of tapered beams with continuously varying rectangular cross sections of depth and breadth. The Euler–Bernoulli theory of bending was used to describe the motion of the beam. The eigenfrequency equation was obtained by the Rayleigh–Ritz method. Nijgh and Veljkovic [10] derived analytical prediction models for the elastic behaviour and the first eigenfrequency of non-prismatic composite beams with non-uniform shear connector arrangements. The approach was based on 6th and 2nd order differential equations used to define matrix equations for a finite number of linearized composite beam segments. The analytical models were validated using experimental and numerical results obtained with a simply supported tapered composite beam.
Demir et al. [11] studied the free vibration behavior of a multilayered symmetric sandwich beam made of functionally graded materials (FGMs) with variable cross-section resting on variable Winkler elastic foundation. It was assumed that the width of the beam varies exponentially along the length of the beam, and also the beam is resting on an elastic foundation, whose coefficient is variable along the length of the beam. Mahi et al. [12] proposed a new hyperbolic shear deformation theory applicable to bending and free vibration analysis of isotropic, functionally graded, sandwich, and laminated composite plates. The energy functional of the system was obtained using Hamilton’s principle. Free vibration frequencies were accurately calculated using a set of boundary characteristic orthogonal polynomials associated with the Ritz method. Numerical comparisons were also carried out to verify and demonstrate the accuracy and efficiency of their theory. Chen et al. [13] investigated the free and forced vibration characteristics of functionally graded (FG) porous beams with non-uniform porosity distribution, whose elastic moduli and mass density are nonlinearly graded along the thickness direction. The authors derived the equation of motion within the framework of Timoshenko beam theory and by employing the Lagrange equation method together with Ritz trial functions.
Magnucki et al. [14] presented simply supported beams subjected to non-uniformly distributed loads. Shapes of bisymmetrical cross sections of the beams were expressed by special functions. The analytical model of the beams was formulated with consideration of the shear effect. A nonlinear hypothesis of deformation of a planar cross section of beams was assumed. The bending moment and the shear transverse force were formulated. The analytical model was validated using numerical FEM results. Magnucki and Lewinski [15] presented simply supported beams with symmetrically varying mechanical properties in the depth direction. Generalized load of the beams included the load types from uniformly distributed to point load (three-point bending). This load was described analytically by means of a certain function containing a dimensionless parameter. The individual nonlinear “polynomial” hypothesis was applied to describe the deformation of a planar cross section. Based on the definitions of the bending moment and the transverse shear force, the differential equation of equilibrium was obtained, and then analytically solved. In the paper, Magnucki et al. [16] presented a rectangular plate with symmetrically varying mechanical properties in the thickness direction. The nonlinear hypothesis of deformation of the straight line normal to the plate neutral surface was assumed. According to this hypothesis, the plate displacement field was formulated. Based on the Hamilton’s principle, three differential equations of motion were obtained and then solved analytically. The critical loads and fundamental natural frequencies for exemplary plates were derived. The analytical model was verified by the numerical FEM method. Magnucki et al. [17] presented a beam with symmetrically varying mechanical properties in the depth direction. The proposed formulation of the functions of the properties makes a certain generalization in the research of functionally graded materials and allows to describe homogeneous, nonlinearly variable, and sandwich structures with the use of only one consistent analytical model.
Elishakoff [18] described the problem of the cross-correlation effect in random vibrations of discrete systems, beams, plates, and shells. It is demonstrated that natural frequencies in beams on elastic foundations as well as cylindrical or spherical shells might cluster together, resulting in a substantial percentage error if cross-correlations are ignored. In the paper [19], Magnucki considered the problem of free axisymmetric flexural vibration of a circular plate with a clamped edge supported on an elastic foundation. The mechanical properties also vary in the depth direction. Uzny et al. [20] presented the boundary problem of column vibrations in which the longitudinal inertia of the mass element, which loads the slender system, is taken into account. The column was analyzed as a simply supported structure. Experimental verification of the adopted mathematical model was also carried out. Good agreement between the numerical and experimental tests was obtained. Nikkhoo et al. [21] proposed a fast computation of beam-type dynamic response to a force or a mass moving across. Dynamics of a single-span beam was computed with a semi-analytical procedure based on characteristic orthogonal polynomials. Yuan et al. [22] developed a method to simplify the governing equations for the free vibration of Timoshenko beams with both geometrical non-uniformity and material inhomogeneity along the beam axis. A series of exact analytical solutions was derived from the reduced equations. In [23], due to many works on beam vibrations dealing with analytical and numerical techniques, the authors (Guo and Zhang) presented a procedure of a spreading residue harmonic balance for approximating the periodic behavior of a tapered beam. Tan et al. [24] presented an exact approach to investigate the flexural free vibrations of multistep non-uniform beams. The authors used the transfer matrix method, the exact general solutions of one-step beam and iterative method to determine the natural frequencies and modal shapes of a multistep beam with variable cross section. The results were verified by the finite element method. Zingoni [25] considered the problem of the free vibration of plates and developed an efficient group-theoretic formulation for the solution of the problem by the method of finite differences.
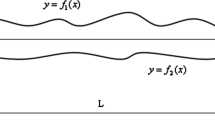
The subject of the studies are two types of simply supported homogeneous beams of symmetrically variable depth and bisymmetrical cross sections. The first type beams have a linearly variable depth (Fig. 1), while the second type concerns a nonlinearly variable depth (Fig. 2).

Schemes of beams with linearly varying depths—expanded-tapered beams

Schemes of beams with nonlinearly varying depths
The linearly variable depth of the beam is
with the dimensionless depth
and \(\xi = x/L\) dimensionless coordinate (\(0 \le \xi \le 1/2\)), \(\chi = \lambda \tan \alpha\)—dimensionless coefficient, \(\lambda = L/h_{e} \)—relative length of the beam, \(L\)—length of the beam, \(h_{e}\)—depth of the beam ends.
The nonlinearly variable depth of the beam is
with dimensionless depth
and: \(\xi = x/L\)—dimensionless coordinate (\(0 \le \xi \le 1\)), \(\chi\)—dimensionless coefficient, \(L\)—length of the beam, \(h_{e}\)—depth of the beam ends.
Taking into account the papers [14], the shape of the bisymmetrical cross section of these beams is assumed as shown in Fig. 3.

Scheme of the shape of the bisymmetrical cross section of the beam ends
The width of the cross section symmetrically varies in the depth direction is
with the dimensionless width
and \(\eta = y/h_{e}\)—dimensionless coordinate (\(- 1/2 \le \eta \le 1/2\)), \(\beta_{0} = b_{0} /b\)—parameter, \(k_{c}\)—exponent (real number).
The shape of the cross section (Fig. 3) is controlled by values of the parameter \(\beta_{0}\) and exponent \(k_{c}\). The area of the bisymmetrical cross section of the beam ends is
The second moment—moment of inertia of the bisymmetrical cross section of the beam ends is
An analytical model presented in this paper involves only the bisymmetrical shape of the beam.
2 Beams with linearly varying depths: analytical studies
The load of the beam with linearly varying depth under its own weight is shown in Fig. 4.

Scheme of the load of the beam with linearly varying depth under the own weight
The intensity of the load is
where \(q_{e} = g\varrho A_{e}\), \(g = 9.81 \,{\text{m}}/{\text{s}}^{2} \)– acceleration of gravity, \(\varrho\)—mass density.
The reactions of the supports are
The bending moment is
where \(\xi_{1}\)—dimensionless coordinate (\(0 \le \xi_{1} \le \xi\)).
Consequently, after integration and simple transformation, one obtains
where the dimensionless bending moment is as follows:
The differential equation of the beam deflection curve, according to the Euler–Bernoulli beam theory, is in the following form:
where \(J_{z} \left( \xi \right) = J_{ze} \tilde{h}_{1}^{3} \left( \xi \right)\)—moment of inertia of the bisymmetrical cross section of the beam, \(v\left( \xi \right)\)—deflection of the beam.
Substituting the expressions (12) into Eq. (14), one obtains
This equation, after integration, is in the following form:
where
\(C_{1} = - \frac{{4 + 6\chi + 3\chi^{2} + 8\chi \left( {1 + \chi } \right)^{2} }}{{96\chi^{3} \left( {1 + \chi } \right)^{2} }}\)—integration constant resulting from the condition \(\left. {{\text{d}}v/{\text{d}}\xi } \right|_{1/2} = 0\). Equation (16) after integration is as follows:
with the dimensionless deflection curve of the beam
and \(C_{2} = - \frac{{2 + 6\chi + 3\chi^{2} }}{{192\chi^{4} }}\)—integration constant calculated from the condition \(v\left( 0 \right) = 0\).
The dimensionless deflection curve of the beam with constant depth (\(\chi = 0\)—the particular case) is as follows:
Hamilton’s principle reads
where
-
The kinetic energy:
$$ \begin{array}{*{20}c} {\displaystyle U_{k} = \varrho A_{e} L\mathop \int \limits_{0}^{\frac{1}{2}} \tilde{h}_{1} \left( \xi \right)\left( {\frac{\partial v}{{\partial t}}} \right)^{2} {\text{d}}\xi ,} \\ \end{array} $$(21) -
The elastic strain energy:
$$ \begin{array}{*{20}c} \displaystyle {U_{\varepsilon } = \frac{{EJ_{ze} }}{{L^{3} }}\mathop \int \limits_{0}^{\frac{1}{2}} \tilde{h}_{1}^{3} \left( \xi \right)\left( {\frac{{\partial^{2} v}}{{\partial \xi^{2} }}} \right)^{2} {\text{d}}\xi .} \\ \end{array} $$(22)
Therefore, based on Hamilton’s principle (20), the differential equation of motion is in the following form:
The differential Eq. (23) is approximately solved with the use of the assumed function
where \(\tilde{v}\left( \xi \right)\)—dimensionless deflection curve of the beam (18), \(v_{a} \left( t \right)\)—function of time t.
Substituting this function into Eq. (23) one obtains
Then, after applying the Galerkin method, this equation is approximately solved,
where \({\Phi }_{1} \left( \xi \right)\)—the left part of Eq. (25).
Integrating the expressions (26), with consideration of the function (18) and after simple transformation, one obtains
with the dimensionless coefficient \(C_{\omega 1} = J_{11} /J_{01}\), and
Equation (27) is approximately solved with the use of the assumed function
where \(v_{a}\)—amplitude of the flexural vibration, ω—fundamental natural frequency.
After substituting this function into Eq. (27), the fundamental natural frequency is obtained,
where \(L\) [mm]—length of the beam, \(\varrho\) [kg/m3]—mass density, \(A_{e}\) [mm2]—area of the cross section of the beam ends, \(J_{ze}\) [mm4]—moment of inertia of the cross section of the beam ends. Three exemplary cross sections of the beam family are assumed for the studies (Fig. 5).

Three example cross sections of the family beams
The detailed calculations of the exemplary beams with linearly varying depths are carried out for the following data: length \(L = 3600 \,{\text{mm}}\), width of the beam \(b = 80 \,{\text{mm}}\), depth of the beam ends \(h_{e} = 180\, {\text{mm}}\), material constants \(\rho = 7850 \,{\text{kg}}/{\text{m}}^{3}\) and \(E = 2\cdot10^{5}\, {\text{MPa}}\). The results of the calculations are specified in Tables 1, 2, 3, and 4.
3 Beams with nonlinearly varying depths: analytical studies
The load of the beam with nonlinearly varying depth under its own weight is similar to that shown in Fig. 4. The intensity of the load is
where \(q_{e} = g\varrho A_{e}\).
The reactions of the supports are
The bending moment is
Thus, after integration and simple transformation, one obtains
where the dimensionless bending moment is as follows:
The differential equation of the deflection curve of the beam, according to the Euler–Bernoulli beam theory, with consideration of the expression (34) is in the following form:
Solving this equation in a similar way as for a beam with linearly varying depth, the dimensionless deflection curve of the beam is obtained in the following form:
where \(C_{1} = \mathop \smallint \nolimits_{0}^{1/2} \frac{{\tilde{M}_{b} \left( \xi \right)}}{{\tilde{h}^{3} \left( \xi \right)}}{\text{d}}\xi\)—integration constant calculated from the condition \(\left. {dv/d\xi } \right|_{1/2} = 0\).
Based on Hamilton’s principle (20), the differential equation of motion is in the following form:
where \(f_{2} \left( \xi \right) = 3\pi^{2} \chi \left[ {2\chi \cos^{2} \left( {\pi \xi } \right) - \sin \left( {\pi \xi } \right)\tilde{h}_{2} \left( \xi \right)} \right]\).
The differential Eq. (37) is approximately solved with the use of the assumed function
where \(\tilde{v}\left( \xi \right)\)—dimensionless deflection curve of the beam (36), \(v_{a} \left( t \right)\)—function of time t.
Substituting this function into Eq. (37) one obtains
This equation is approximately solved with the use of the Galerkin method,
where \({\Phi }_{2} \left( \xi \right)\)—the left part of Eq. (39).
Integrating the expressions (40), with consideration of the function (36) and after simple transformation, one obtains
with dimensionless coefficient \(C_{\omega 2} = J_{12} /J_{02}\), and
Equation (41) is approximately solved with the use of the function (28), and the fundamental natural frequency is obtained as
The detailed calculations of the exemplary beams with nonlinearly varying depths are carried out for the same date as for beams with linearly varying depths. The results of the calculations are specified in Tables 5, 6, 7, and 8.
4 Beams with linearly varying depths: numerical FEM studies
The FEM model of the beam with linearly varying depth is developed with the use of the Abaqus 6.12. Taking into account the symmetry of the beam, the model relates to a quarter of the beam (Fig. 6).

Exemplary FEM model of the beam with linearly varying depth for numerical studies
The FEM calculations are performed for the data adopted above for analytical studies. The results of the calculations are specified in Tables 9, 10, and 11.
The analytical (Tables 2, 3, 4) and numerical (Tables 9, 10, 11) results are graphically compared in Fig. 7. Comparison of the results indicates very good convergence of both series of the results. The differences do not exceed 1.95%.

Comparison of the values of the fundamental natural frequency of the beams with linearly varying depths calculated analytically (AN) and numerically (FE)
5 Beams with nonlinearly varying depths: numerical FEM studies
The FEM model of the beam with linearly varying depth is developed with the use of the Abaqus 6.12. Taking into account the symmetry of the beam, the model refers to a quarter of the beam (Fig. 8).

Exemplary FEM model of the beam with linearly varying depth for numerical studies
The FEM calculations are carried out for the data adopted above for analytical studies. The results of the calculations are specified in Tables 12, 13, and 14.
The analytical (Tables 6, 7, 8) and numerical (Tables 12, 13, 14) results are graphically compared in Fig. 9. Comparison of the results indicates very good convergence of both series of the results. The differences do not exceed 2.25%.

Comparison of the values of the fundamental natural frequency of the beams with nonlinearly varying depths calculated analytically (AN) and numerically (FE)
6 Analytical study based on a simplified model of the beams
The simplified model of the studied beams is formulated taking into account the constant average value of their depth. Therefore,
-
The average area of the bisymmetrical cross section of the beams is
$$ \begin{array}{*{20}c} {A_{av} = bh_{av} \tilde{A},} \\ \end{array} $$(43)
where: \(h_{av}\)—average depth, \(\tilde{A} = \mathop \int \nolimits_{ - 1/2}^{1/2} \tilde{b}\left( \eta \right)d\eta\)—dimensionless area.
The intensity of the load (9), in this case, is constant,
Thus, the bending moment (12) is as follows:
and the deflection curve of the beams (17) is in the following form:
with the dimensionless deflection curve
The function \({\text{sin}}\left( {\pi \xi } \right)\) is equivalent to this function (47); therefore, for further studies it is assumed that
The elastic strain energy (22) is as follows:
and the kinetic energy (21) is in the following form:
Based on Hamilton’s principle (20), the differential equation of motion is as follows:
Equation (51) is approximately solved with the use of the assumed function
where \(v_{a} \left( t \right)\)—function of time.
Substituting this function into Eq. (51) one obtains
Equation (53) is approximately solved with the use of the assumed function
where \(v_{a}\)—amplitude of the flexural vibration, ω—fundamental natural frequency.
After substituting this function into Eq. (53) one obtains the fundamental natural frequency for the simplified model of the beam as
The average dimensionless depth of the beams with linearly varying depths (2) is as follows:
The results of the detailed calculations of the fundamental natural frequency (55) for the exemplary beams with consideration of the average depth (56) are specified in Tables 15, 16, and 17 and presented in Fig. 10. The average dimensionless depth of the beams with nonlinearly varying depths (4) is as follows:

Comparison of the values of the fundamental natural frequency of the beams with linearly varying depths calculated accurately (AN) and approximately (AVG)
The results of the detailed calculations of the fundamental natural frequency (55) for the exemplary beams with consideration of the average depth (57) are specified in Tables 18, 19, and 20 and presented in Fig. 11.

Comparison of the values of the fundamental natural frequency of the beams with nonlinearly varying depths calculated accurately (AN) and approximately (AVG)
The relative difference between the calculated fundamental natural frequency values for exact and simplified models of the beams is as follows:
The values of the relative differences (58) for the beams with linearly varying depths are specified in Table 21. The values of the relative differences (58) for the beams with nonlinearly varying are specified in Table 22.
A significant relative difference is noticeable for the beams with a negative dimensionless coefficient \(\chi\) (the concave beams), whereas for the beams with a positive dimensionless coefficient \(\chi\) (the convex beams) the relative difference is insignificant from a practical point of view.
7 Conclusions
In this paper, the two types of simply supported homogeneous beams with symmetrically variable depth and bisymmetrical cross sections were considered. The mathematical model of analyzed beams was proposed, and the formulas for the natural frequencies were derived. The results obtained in the analytical study were compared with finite element ones from Abaqus. The difference between results from analytical and numerical (FEM) approach is slightly below 2% in the case of beams with linearly varying depths and slightly above 2% in the case of beams with nonlinearly varying depths. It is shown that in engineering practice it is acceptable using a constant average depth (approximate solution) only for the convex beams.
References
Carrera, E., Giunta, G., Petrolo, M.: Beam structures. Wiley (2011)
Ganesan, R., Zabihollah, A.: Vibration analysis of tapered composite beams using a higher-order finite element part I: formulation. Compos. Struct. 77, 306–318 (2007). https://doi.org/10.1016/j.compstruct.2005.07.018
Ganesan, R., Zabihollah, A.: Vibration analysis of tapered composite beams using a higher-order finite element part II: parametric study. Compos. Struct. 77, 319–330 (2007). https://doi.org/10.1016/j.compstruct.2005.07.017
Shahba, A., Attarnejad, R., Hajilar, S.: Free vibration and stability of axially functionally graded tapered Euler-Bernoulli beams. Shock. Vib. 18, 683–696 (2011). https://doi.org/10.1155/2011/591716
El-Sayed, T.A., El-Mongy, H.H.: Application of variational iteration method to free vibration analysis of a tapered beam mounted on two-degree of freedom subsystems. Appl. Math. Model. 58, 349–364 (2018). https://doi.org/10.1016/j.apm.2018.02.005
Viglietti, A., Zappino, E., Carrera, E.: Free vibration analysis of locally damaged aerospace tapered composite structures using component-wise models. Compos. Struct. 192, 38–51 (2018). https://doi.org/10.1016/j.compstruct.2018.02.054
Banerjee, J.R., Ananthapuvirajah, A.: Free flexural vibration of tapered beams. Comput. Struct. 224, 106106 (2019). https://doi.org/10.1016/j.compstruc.2019.106106
Magnucki, K., Lewiński, J., Magnucka-Blandzi, E., Stawecka, H.: Three-point bending of an expanded-tapered beam with consideration of the shear effect. J. Theor. Appl. Mech. 58, 661–672 (2020). https://doi.org/10.15632/jtam-pl/122203
Zhou, D., Cheung, Y.K.: The free vibration of a type of tapered beams. Comput. Methods Appl. Mech. Eng. 188, 203–216 (2000). https://doi.org/10.1016/S0045-7825(99)00148-6
Nijgh, M.P., Veljkovic, M.: A static and free vibration analysis method for non-prismatic composite beams with a non-uniform flexible shear connection. Int. J. Mech. Sci. 159, 398–405 (2019). https://doi.org/10.1016/j.ijmecsci.2019.06.018
Demir, E., Çallioğlu, H., Sayer, M.: Vibration analysis of sandwich beams with variable cross section on variable Winkler elastic foundation. Sci. Eng. Compos. Mater. 20, 359–370 (2013). https://doi.org/10.1515/secm-2012-0151
Mahi, A., Bedia, E.A.A., Tounsi, A.: A new hyperbolic shear deformation theory for bending and free vibration analysis of isotropic, functionally graded, sandwich and laminated composite plates. Appl. Math. Model. 39, 2489–2508 (2015). https://doi.org/10.1016/j.apm.2014.10.045
Chen, D., Yang, J., Kitipornchai, S.: Free and forced vibrations of shear deformable functionally graded porous beams. Int. J. Mech. Sci. 108–109, 14–22 (2016). https://doi.org/10.1016/j.ijmecsci.2016.01.025
Magnucki, K., Lewinski, J., Cichy, R.: Bending of beams with bisymmetrical cross sections under non-uniformly distributed load: analytical and numerical–FEM studies. Arch. Appl. Mech. 89, 2103–2114 (2019). https://doi.org/10.1007/s00419-019-01566-5
Magnucki, K., Lewiński, J.: Bending of beams with symmetrically varying mechanical properties under generalized load: shear effect. Eng. Trans. 67, 441–457 (2019). https://doi.org/10.24423/EngTrans.987.20190509
Magnucki, K., Witkowski, D., Magnucka-Blandzi, E.: Buckling and free vibrations of rectangular plates with symmetrically varying mechanical properties: analytical and FEM studies. Compos. Struct. 220, 355–361 (2019). https://doi.org/10.1016/j.compstruct.2019.03.082
Magnucki, K., Witkowski, D., Lewiński, J.: Bending and free vibrations of beams with symmetrically varying mechanical properties: Shear effect. Mech. Adv. Mater. Struct. 27, 325–332 (2018). https://doi.org/10.1080/15376494.2018.1472350
Elishakoff, I.: Dramatic effect of cross-correlations in random vibrations of discrete systems, beams, plates, and shells. Springer (2020)
Magnucki, K.: Free axisymmetric flexural vibrations of circular plate with symmetrically varying mechanical properties supported on elastic foundation. Vibr. Phys. Syst. 31, 2020217 (2020)
Uzny, S., Kutrowski, Ł, Osadnik, M.: The non-linear vibrations of simply supported column loaded by the mass element. Appl. Math. Model. 89, 700–709 (2021). https://doi.org/10.1016/j.apm.2020.07.064
Nikkhoo, A., Farazandeh, A., Hassanabadi, M.E., Mariani, S.: Simplified modeling of beam vibrations induced by a moving mass by regression analysis. Acta Mech. 226, 2147–2157 (2015). https://doi.org/10.1007/s00707-015-1309-3
Yuan, J., Pao, Y.-H., Chen, W.: Exact solutions for free vibrations of axially inhomogeneous Timoshenko beams with variable cross section. Acta Mech. 227, 2625–2643 (2016). https://doi.org/10.1007/s00707-016-1658-6
Guo, Z., Zhang, W.: The spreading residue harmonic balance study on the vibration frequencies of tapered beams. Appl. Math. Model. 40, 7195–7203 (2016). https://doi.org/10.1016/j.apm.2016.02.037
Tan, G., Wang, W., Jiao, Y.: Flexural free vibrations of multistep nonuniform beams. Math. Probl. Eng. 2016, 1–12 (2016). https://doi.org/10.1155/2016/7314280
Zingoni, A.: A group-theoretic finite-difference formulation for plate eigenvalue problems. Comput. Struct. 112–113, 266–282 (2012). https://doi.org/10.1016/j.compstruc.2012.08.009
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Magnucki, K., Magnucka-Blandzi, E., Milecki, S. et al. Free flexural vibrations of homogeneous beams with symmetrically variable depths. Acta Mech 232, 4309–4324 (2021). https://doi.org/10.1007/s00707-021-03053-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-021-03053-x