
Abstract
In this study, the inelastic buckling equation of a thin plate subjected to all in-plane loads is analytically solved and the inelastic buckling coefficient is explicitly estimated. Using the deformation theory of plasticity, a multiaxial nonlinear stress–strain curve is supposed which is described by the Ramberg–Osgood representation and the von Mises criterion. Due to buckling, the variations are applied on the secant modulus, the Poisson’s ratio and the normal and shear strains. Then, the inelastic buckling equation of a perfect thin rectangular plate subjected to combined biaxial and shear loads is completely developed. Applying the generalized integral transform technique, the equation is straightforwardly converted to an eigenvalue problem in a dimensionless form. Initially, a geometrical solution and an algorithm are presented to find the lowest inelastic buckling coefficient \(\left( {k_{s} } \right)\). The solution is successfully validated by some results in the literature. Then, a semi-analytical solution is proposed to simplify the calculation of \(k_{s}\). The method of linear least squares is applied in two stages on the obtained results and an approximate polynomial equation is found which is usually solved by trial and error. The obtained results show good agreement between the proposed semi-analytical and geometrical methods, so that the differences are < 12%. The semi-analytical solution is easily programmed in usual scientific calculators and can be applied for practical purposes.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The stability of structural plates is one of the most important design criteria in mechanics, civil, aerospace and marine engineering. During their lifetime, various loads are applied on them to perform in-plane stresses on their edges. In addition to shear stress, the edges may experience compressive or tensile (biaxial) stresses and due to the geometrical and material properties of the plate, inelastic buckling may occur. An analytical procedure may be quite complicated for the solution of the inelastic buckling equation of the plate with diverse boundary conditions and under multiaxial loadings. Thus, an explicit solution should be preferably developed using the theories of plasticity to predict the inelastic buckling load of plates.
In the 1940s, two main plasticity models were applied to describe the inelastic buckling of plates. Ilyushin [1], Stowell [2] and Bijlaard [3] used the deformation (total) theory of plasticity, while Handelman and Prager [4] used the incremental (flow) theory of plasticity. In the deformation theory of plasticity, the total strain is related to the total stress by the secant modulus without any consideration of stress history and then, the surveyed path to get a particular point on the stress–strain curve is not important. As only the secant modulus appears in the stress–strain relations, the hardening is isotropic in this theory. Nevertheless, in the incremental theory of plasticity, the stress at any point and time is a function of the current strain as well as the history of strain. In other words, increments in strain are related to increments of stress by the tangent modulus, leading to a complicated nonlinear stress–strain relation. Applying the variational approach on the stress–strain relations, only the tangent modulus appears in the incremental theory, while both the secant and tangent modulus appear in the deformation theory. Generally, the not very complicated deformation theory relations are comparable with very complicated incremental theory relations for inelastic stress analysis. Although the incremental theory is more general than the deformation theory, the latter can be successfully applied to proportional loading problems in which the components of the stress tensor increase in a constant ratio to each other [5, 6]. In addition, the deformation theory is an acceptable approach for the bifurcation check in the buckling of plates and provides good agreement with measured buckling loads for bars, plates and shells, while the incremental theory predicts much higher than the measured buckling loads [7]. This discrepancy, which is called ‘plastic buckling paradox’ [7], has not been solved generally until recently [8]. One of the oldest problems which directly refers to this ‘paradox’ and reported in the literature is the inelastic stability of cruciform columns [7,8,9,10,11]. Recently, Guarracino and Simonelli [12] showed that the torsional buckling of a cruciform column in the inelastic range is not actually the ‘plastic buckling paradox’ if effects of the imperfections are accurately computed up to the limit load. Their analytical procedure represented very good agreement between flow and deformation theories for this problem. The ‘plastic buckling paradox’ was also tried to solve for circular cylindrical shells under both axial and non-proportional loading [13, 14]. The results of finite element analysis were compared with those of experimental studies and it was shown that the adaptation of flow theory of plasticity with the experimental findings depends on the assumption of initial imperfections and buckling shapes.
Shamass [15] reviewed in detail many aspects which affect on the ‘plastic buckling paradox’. In this review, the considered aspects are the effective shear modulus, initial imperfections, different material constitutive models, transverse shear deformation, deformations in the pre-bifurcation state, actual boundary conditions, sensitivity of the predictions by different plasticity theories and effects of the kinematic constraints used in analytical treatments. It is concluded that the incremental theory does not have any limitation and a number of combined approximations affect the results predicted by the incremental theory.
Generally, the variations of strains and stresses during buckling are used to develop the inelastic buckling equation of plates. In the initial studies of deformation theory of plasticity, the material was supposed to be incompressible in the nonlinear (elastoplastic) region of the stress–strain curve and then, the Poisson’s ratio was always ½ for isotropic materials. As a result, the variation was only being applied on the strains and the secant modulus in the stress–strain relations (Hooke’s law) as seen in the approaches of Ilyushin [1] and Stowell [2]. Pifko and Isakson [16], Bradford and Azhari [17], Ibearugbulem et al. [18, 19], Onwuka et al. [20] and Eziefula et al. [21] applied Stowell’s procedure in their studies. However, in several investigations [22,23,24,25,26,27,28,29,30,31,32,33,34,35], Bijlaard’s formulation [3] was applied in which the Poisson’s ratio appears in the elastic value during inelastic buckling. Gerard and Wildhorn [36] showed that for a nonlinear stress–strain curve such as the Ramberg–Osgood representation [37], the Poisson’s ratio changes from the elastic value to the incompressible value of ½ as the stress is increased above the yield stress,
where \(E\) is the Young’s modulus (or the slope of the stress–stain curve at zero stress), \({E}_{{\rm sec}}\) is the secant modulus and \({\nu }_{{\rm e}}\) is the elastic Poisson’s ratio. Using Eq. (1), the variable Poisson’s ratio is considered in the elastoplastic region of the stress–strain curve as well as the other parameters [38,39,40,41,42,43]. Jones [6] successfully applied variation to the Poisson’s ratio and developed the inelastic buckling equation of a plate subjected to biaxial loads, although the obtained equation was only solved for uniaxial loading.
The elastic/inelastic buckling of plates is analytically formulated with a fourth-order linear partial differential equation. In recent decades, several numerical and semi-analytical methods have been proposed to solve this equation with different boundary conditions and mostly uniaxial loading. The most important of these methods are finite element (FE) [16, 44, 45], finite difference [42], finite strip [31], spline finite strip [24], isoparametric spline finite strip [29, 46], complex finite strip [17, 26, 47], finite layer (FL) [48], differential quadrature (DQ) [30, 43], generalized differential quadrature (GDQ) [33,34,35], element-free Galerkin (EFG) [32], funicular polygon (FP) [23], p-Ritz [49, 50], Rayleigh–Ritz [51,52,53], and the virtual work principle [18,19,20,21]. Integral transforms have already been used for solving complex boundary value problems in elastic bending, buckling and vibration of beams. Fourier series were differentiated as many as four times to solve the corresponding ordinary differential equations. In 1944, Green [54] extended the double Fourier series for solving elastic problems of isotropic rectangular plates in which partial differential equations appear. Later, this method was used for the buckling of simply supported orthotropic and isotropic skew plates, subjected to in-plane compressive and shear edge loads [55]. Afterward, double finite integral transform and the corresponding inverstion were analytically used to solve the bending equation of rectangular thin/thick plates with different boundary conditions [56,57,58,59,60]. As the double finite integral transform has some restrictions for complex boundary conditions, it may be modified to the generalized integral transform technique (GITT) which is mathematically more general and also faster convergence. This technique was previously applied in the automatic and accuracy-controlled solution of nonlinear diffusion and convection–diffusion problems as well as the solution of Navier–Stokes equations [61]. In the GITT, an appropriate auxiliary eigenvalue problem is solved to find the kernel of the integral transform. Then, applying the integral transformation to an ordinary/a partial differential equation, it is transformed into infinite algebraic/ordinary differential equations and then, they are truncated at finite terms to allow the computational solution. Alternatively, the double integral transformation can be directly applied to a PDE for obtaining the infinite algebraic equations. For bending, buckling and vibration problems of rectangular plates, kernels of the double integral transform are similar to the vibrating functions of two beams which have the same material properties and boundary conditions of plates in two orthogonal directions. If the original PDE is linear, then the linear algebraic equations are naturally obtained, so that they can be analytically solved for the bending problem and on the other hand, lead to an algebraic eigenvalue problem for buckling/vibration of a plate. Thus, the buckling load/natural frequency is obtained for each mode as well as the corresponding mode shape. An et al. [62] used the GITT as single integral transform, so that the original PDE is transformed into a set of coupled ordinary differential equations. Ullah et al. [63] employed the GITT and solved an eigenvalue problem to obtain the elastic buckling coefficient of uniaxial loaded fully clamped plates (CCCC), plates with three clamped and one edge simply supported (CCCS), and plates with two adjacent edges clamped and the other edges simply supported (CCSS). The GITT has been also applied for the bending solution of orthotropic rectangular thin foundation plates [64] as well as free vibration of orthotropic rectangular plates with free edges [65].
In this study, using the deformation theory of plasticity [6] and applying variations to all mechanical components of an isotropic perfect rectangular plate, the complete equation of inelastic buckling of plates under combined biaxial and shear stresses is developed. The parameters of the Ramberg–Osgood representation are used to find the secant and tangent moduli in the nonlinear region of the stress–strain curve. Then, using the generalized integral transform technique (GITT) [62,63,64,65], the inelastic buckling equation is solved for simply supported (SSSS) and fully clamped (CCCC) plates and the effect of variation of Poisson’s ratio on the inelastic buckling load is compared with those of previous studies. The rectangular plate may be subjected to compressive–compressive–shear (CCS), compressive–tensile–shear (CTS), tensile–compressive–shear (TCS) or tensile–tensile–shear (TTS) loads. A geometrical solution and an algorithm are presented to find the inelastic buckling coefficient of a plate based on the aspect ratio, thickness ratio, load ratios, secant to Young’s modules ratio, elastic Poisson’s ratio and Ramberg–Osgood parameters. Using the obtained results and linear regression technique (linear least squares), a semi-analytical procedure is also suggested to calculate the lowest inelastic buckling coefficient. In this procedure, a qth-order equation must be solved using a trial and error method in which q is the shape parameter of the Ramberg–Osgood representation. The procedure is applicable to practical purposes and can be easily programmed in usual scientific calculators.
2 Analytical approach
2.1 Inelastic buckling equation of a plate
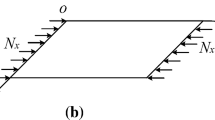
Consider a rectangular plate with dimensions of a × b × t subjected to CCS, CTS, TCS or TTS loads as shown in the Cartesian coordinate system of Fig. 1. In this figure, \(N_{x} = t\sigma_{x}\), \(N_{y} = t\sigma_{y}\) and \(N_{xy} = t\tau\) are the applied loads per unit length on the plate edges in the x-, y- and xy-directions, respectively. Also, \(\sigma_{x}\), \(\sigma_{y}\) and \(\tau\) are the applied stresses in the x-, y- and xy-directions, respectively.

A rectangular plate subjected to a CCS, b CTS, c TCS and d TTS loads
In the deformation theory of plasticity, using general nonlinear material properties (\(E_{{\rm sec}}\) and ν), the two-dimensional stress–strain relations are established as shown in Eq. (2). In these relations, \(\varepsilon_{x}\), \(\varepsilon_{y}\) and \(\gamma\) are the strains in the x-, y- and xy-directions, respectively, and ν is obtained from Eq. (1):
After applying the variations to all components of Eq. (2),
where \(\delta \varepsilon_{0x} { }\), \(\delta \varepsilon_{y0}\) and \(\delta \gamma_{0}\) are the variations of the middle surface strains in the x-, y- and xy-directions, respectively, \(\delta \kappa_{x} = - \frac{\partial^{2} \delta w}{\partial x^{2}}\), \(\delta \kappa_{y} = - \frac{\partial^{2} \delta w}{\partial y^{2}}\) are the variations of the curvatures in the x- and y-directions, respectively, \(\delta \kappa_{xy} = - 2\frac{\partial^{2} \delta w}{\partial x\partial y}\) is the variation of twist, and z is the distance from the middle surface of the plate as shown in Fig. 1. In addition,
In Eq. (4), \(\overline{K} = \frac{1}{\sigma_{i}^{2} \overline{H}}\left( {1 - \frac{E_{{\rm tan}}}{E_{{\rm sec}}}} \right),\) where \(\sigma_{i} = \sqrt {\sigma_{x}^{2} - \sigma_{x} \sigma_{y} + \sigma_{y}^{2} + 3\tau^{2} }\) is the stress intensity based on von Mises criteria and \(E_{{\rm tan}}\) is the tangent modulus. Also,
Substituting Eq. (3) into Eq. (6), the moment–curvature relations can be determined:
Then, substituting Eq. (7) into the equilibrium equation,
the inelastic buckling equation of the plate is obtained:
2.2 Generalized integral transform technique (GITT)
When the GITT is used for a two-dimensional boundary value problem, two appropriate auxiliary ODEs must be solved. Here, they are the vibrating beam equations (Eq. (9)) which satisfy the corresponding boundary conditions (Eqs. (10, 11)) and orthogonality (Eqs. (12, 13)) in the x- and y-directions:
where SS and CC are used for simply supported and clamped beams, respectively, and m, n, r and s are positive integers. Equations (9) are readily solved for the different boundary conditions (Eqs. (10, 11)) to yield the related eigenfunctions which are shown in Eqs. (14) and (15) for SS and CC beams, respectively:
where
In Eqs. (14) and (15), \(\alpha_{m}\) and \(\beta_{n}\) are the roots of transcendental beam frequency equations:
Using the obtained eigenfunctions in Eqs. (14, 15), the two-dimensional generalized finite integral transform and the corresponding inversion are defined as:
where
and \(\phi = \frac{a}{b} \) is the plate aspect ratio.
2.3 Analytical procedure for inelastic buckling
The GITT should be applied to all terms of Eq. (8). Using integration by parts in the successive steps, the fourth- and second-order partial derivatives in Eq. (8) are reduced and finally, \(\delta w\left( {x,y} \right)\) is transformed to \(\delta w_{mn}\) based on Eq. (19). In Eqs. (22)–(29), these transformations are shown with the dimensionless coefficients.
with
Applying the GITT into Eq. (8) and using Eqs. (22)–(29), the characteristic equation in dimensionless form is obtained:
where \(\psi_{x} = \frac{{N_{x} }}{{N_{xy} }}\) and \(\psi_{y} = \frac{{N_{y} }}{{N_{xy} }}\) are the load ratios supposing that \(N_{xy} \ne 0\) and \(k_{s} = \frac{{12\left( {1 - \nu_{\rm e}^{2} } \right)}}{{\pi^{2} }}\left( \frac{b}{t} \right)^{2} \frac{{N_{xy} }}{Et}\) is the inelastic buckling coefficient.
Equation (40) establishes an infinite system of linear equations. For a practical calculation, the positive integers m, n, r and s must be limited to an upper value, h. Thus, Eq. (40) can be shown with a finite number of linear equations in matrix form:
where
and
Supposing \(\psi_{x}\), \(\psi_{y}\), \(\nu_{\rm e}\), \(\frac{{E_{{\rm sec}} }}{E}\), \(\frac{{E_{{\rm tan}} }}{{E_{{\rm sec}} }}\), \(k_{s}\), \(\phi\) and h in Eq. (41), the eigenvalues of the coefficient matrix can be calculated for SSSS or CCCC plates. If the smallest eigenvalue is zero, the supposed \(k_{s}\) will be the lowest inelastic critical coefficient \(\left( {k_{s,cr}^{\left( 1 \right)} = k_{s} } \right)\). Likewise, if the second, third, …. or ith eigenvalue is zero, the inelastic critical coefficient is obtained for the corresponding mode. Using the general software Python [66] and selecting a few series terms (h) for the arrays of the coefficient matrix in Eq. (41), the inelastic critical coefficient \(\left( {k_{s,cr} } \right)\) can be obtained accurately enough for the different buckling modes. However, the secant and tangent moduli relation obviously affects the inelastic buckling coefficient. For a Ramberg–Osgood stress–strain model, the secant and tangent moduli are defined as [37]:
where \({\sigma }_{.7E}\) is the stress at which the line with slope \(0.7E\) intersects the stress–strain curve and q is a shape parameter which describes the curvature of the stress–strain curve. Considering two dimensionless parameters, \(\xi = \frac{{E_{{\rm sec}} }}{E} \le 1\) and \(\eta = \frac{{E_{{\rm tan}} }}{{E_{{\rm sec}} }} \le 1\), Eqs. (44) and (45) may be combined into
so that all terms of the arrays of the coefficient matrix (Eq. 42) can be expressed by \(\phi ,{\psi }_{x}, {\psi }_{y},\xi ,q,{\nu }_{\rm e}\) and \({k}_{s}\). Then using an implicit function, \({k}_{s}\) can be briefly described as:
On the other hand, using Eq. (44), \(k_{s}\) can be expressed with an explicit function:
where \(\lambda = \frac{b}{t}\) is the plate thickness ratio.
In Eqs. (47) and (48), \(\xi \) is a mutual variable in both \(f\) and \(g\) as well as \({\psi }_{x}, {\psi }_{y}, {\nu }_{\rm e}\) and q. As \(\xi \) is a continuous variable \(\left(0\le \xi \le 1\right)\), both \(f\) and \(g\) can be plotted in the \({k}_{s}-\xi \) plane. The intersection of the two plotted curves gives the inelastic buckling coefficient as well as the corresponding secant modulus. The described geometrical solution may be summarized by an algorithm as shown in Fig. 2. In this algorithm, an initial value of \(\xi \) is assumed (\({\xi }_{ini}\) in Fig. 2). In the next steps, \(\xi \) is increased by \(\delta \xi \) unless \(\xi >1\). Here, \({\xi }_{ini}=\delta \xi =0.025\). In addition, defining a dimensionless parameter, \(\Omega ={\left({\psi }_{x}^{2}-{\psi }_{x}{\psi }_{y}+{\psi }_{y}^{2}+3\right)}^{\frac{1}{2}}\), Eqs. (4) and (5) are briefly rewritten and finally, the coefficients matrix in Eq. (41) is re-established. At the end of the procedure, the \({k}_{s}-\xi \) curve will be found for the corresponding buckling mode based on the known parameters: \(\phi ,{\psi }_{x}, {\psi }_{y},{\nu }_{\rm e}\) and \(q\). In this study, the lowest buckling coefficient is calculated. The procedure can be repeated using the new parameters to find new curves.

An algorithm to plot the \({k}_{s}-\xi \) curve of the plate
3 Results and discussion
In this study, the Ramberg–Osgood representation is used for the nonlinear mechanical properties of the material, although this approach can also be developed for the other known models of nonlinear behavior.
3.1 Validation, effects of variation of Poisson’s ratio and number of series terms
In order to verify the analytical approach, four studies are considered. The first one is an experimental study for plastic buckling of simply supported uniaxial compressed plates [67]. In the second study [45], the solution of the ‘plastic buckling paradox’ was sought in the mode of testing which had previously been done in Ref. [67]. The authors applied the incremental theory of plate buckling and involved the boundary stresses introduced by the friction between the plate and the testing machine heads. For the pre-buckling stress analysis, an incremental finite element procedure was performed using ANSYS, so that the load was subdivided into a sequence of small increments. The material properties and dimensions of the plates were the same or similar to those in Ref. [67] as shown in Tables 1 and 2, respectively. The plate was divided into 80 rectangular elements and the boundary conditions were zero force on the two longitudinal edges and zero displacement on the lower edge in both directions. On the upper edge, uniform and zero displacements were applied in the longitudinal and transverse directions, respectively. In the buckling analysis stage, the finite element procedure for plastic plate buckling described in Ref. [16] was generalized to the case of nonuniform pre-buckling stress state. In the third and fourth studies [16, 23], the finite element and funicular polygon methods are employed for plastic buckling of simply supported and fully clamped plates under uniaxial, biaxial or shear loads.
The suggested algorithm (Fig. 2) can be changed for the uniaxial and biaxial loadings and \({N}_{xy}=0\). In these cases, new load ratios are defined as \({\stackrel{-}{\psi }}_{y}=\frac{{N}_{y}}{{N}_{x}}\) and \({\stackrel{-}{\psi }}_{xy}=\frac{{N}_{xy}}{{N}_{x}}\). The arrays of the stiffness matrix (4) and the characteristic equation (40) should be rewritten by the new load ratios. As a result, \({k}_{x}\) will be obtained instead of \({k}_{s}\), and then \({\sigma }_{x,cr}=\frac{{k}_{x}{\pi }^{2}E}{12\left(1-{\nu }_{\rm e}^{2}\right)}{\left(\frac{t}{b}\right)}^{2}\). Table 1 shows the boundary and load conditions and Ramberg–Osgood parameters in the experimental and numerical studies. In this section, the dimensions of parameters are represented by imperial units to match the results found from the literature.
In Tables 2 and 3, the results of the analytical approach (h = 20) are compared with those of the experimental study [67], numerical analysis (ANSYS and FEM) [45] and funicular polygon method [23]. The results show excellent agreement for both uniaxially loaded simply supported and shear loaded fully clamped plates. The maximum differences are less than 4%, 2.6% and 2% for the experimental, FE (ANSYS) and funicular polygon methods, respectively.
In the fourth study [16], a finite element technique is used in conjunction with the Stowell’s theory [2]. Thus, incompressible material is considered (the Poisson’s ratio is 0.5) during inelastic buckling. Here, the analytical approach is applied for two states: initially, the incompressible material is used \(\left(\nu =0.5\right)\) to compare the analytical and numerical methods, and then, it is repeated using variable Poisson’s ratio (Eq. (1)) to compare the results of the two situations. In Tables 4 and 5, the results are shown for the simply supported plates with aspect ratios 1 and 1.5, respectively, which are under uniaxial and biaxial loads. Table 6 shows the results for the fully clamped and simply supported square plates under uniaxial and pure shear loads, respectively. In Tables 4 and 5, there is no difference between the analytical and numerical methods when the incompressible material is supposed, likewise in Table 6, a negligible difference (< 0.5%) is seen.
In the last row of each section of Tables 4, 5 and 6, results of the second state are compared. These comparisons show that due to the variation of the Poisson’s ratio, in both uniaxial and shear loadings, the inelastic buckling loads decrease. As expected, increasing λ makes a more slender plate and less plasticity occurs prior to buckling. In Figs. 3, 4 and 5, the differences are obviously shown for the different aspect ratios, thickness ratios, boundary and loading conditions. As seen in these figures, increasing the thickness ratio in all cases, the difference increases up to 18.8%. This upper bound only depends on the elastic Poisson’s ratio and can be analytically expressed as \(\frac{1-4{\nu }_{\rm e}^{2}}{3}\). In addition, increasing the plate aspect ratio, the slope of the difference curve increases and reaches a constant value for \(\phi \ge 1\), \(\phi \ge 4\) and \(\phi \ge 5\) as seen in Figs. 3, 4 and 5, respectively.

Difference of \({\sigma }_{x,cr}\left(\nu =0.5\right)\) and \({\sigma }_{x,cr}\left(\nu <0.5\right)\) for a SSSS square plate under uniaxial load

Difference of \({\tau }_{cr}\left(\nu =0.5\right)\) and \({\tau }_{cr}\left(\nu <0.5\right)\) for a SSSS square plate under pure shear load

Difference of \({\sigma }_{x,cr}\left(\nu =0.5\right)\) and \({\sigma }_{x,cr}\left(\nu <0.5\right)\) for a CCCC square plate under uniaxial stress
The number of series terms (h) directly affects the accuracy of the GITT. Table 7 shows a sensitivity analysis of the inelastic buckling coefficient \(\left({k}_{s}\right)\) with \({\nu }_{\rm e}=0.33\), \(\frac{E}{{\sigma }_{0.7E}}=100\) and q = 10. Considering this table, it can be concluded that for small thickness ratios, \({k}_{s}\) converges with 10–15 terms very well for all aspect ratios, boundary conditions and loading combinations. For larger thickness ratios, 20 terms are usually necessary for the convergence, although in TTS loading more terms may be used for more accuracy. However, 20 terms are used for the considered cases in this study.
3.2 Estimation of the inelastic buckling coefficient
In the proposed geometrical solution, the curves of \({k}_{s}=f\left(\xi ,\phi ,{\psi }_{x}, {\psi }_{y},q,{\nu }_{\rm e}\right)\) and \({k}_{s}=g\left(\xi ,{\psi }_{x}, {\psi }_{y},q,{\nu }_{\rm e},\lambda ,\frac{E}{{\sigma }_{.7E}}\right)\) are intersected in the \({k}_{s}-\xi \) plane to find \({k}_{s}\) as well as the corresponding \(\xi \). Figures 6 and 7 show some interaction curves in which \(f\) and \(g\) are plotted with solid and dashed curves, respectively. In each figure, \(\frac{E}{{\sigma }_{.7E}},{\psi }_{x}, {\psi }_{y},q\) and \({\nu }_{\rm e}\) are constants and \(\phi \) and \(\lambda \) are variables to provide the interaction curves. In addition, the intersections of \(\phi =1\) curves and some \(\lambda \) curves are highlighted which correspond to the shown results in Table 3 and the second section of Table 6, respectively. The comparisons show the adequate accuracy of the geometrical solution.

Interaction curves for fully clamped plates with \({\psi }_{x}=0\) and \({\psi }_{y}=0\)

Interaction curves for simply supported plates with \({\psi }_{x}=0\) and \({\psi }_{y}=0\)
In addition to the geometrical solution, a semi-analytical approach may be supposed to simplify the calculation of the inelastic buckling coefficient. The depicted figures in Appendix 1 show that the variation of \(f\) with constant values of \({\nu }_{\rm e}\), \({\psi }_{x}\), \({\psi }_{y}\), \(\phi \) and \(q\) may be estimated by linear or bilinear curves in the \({k}_{s}-\xi \) plane. Equation (49) shows the general form of bilinear (or linear, if \(C=0\) and \({S}_{1}={S}_{2}\)) description of \({k}_{s}\). If the correlation coefficient of the linear approximation \(R<0.999\), then the bilinear curve is considered for the estimation.
where \(\stackrel{-}{\xi }=\frac{C}{{S}_{1}-{S}_{2}}\). The depicted figures in Appendix 2 show that \({S}_{1}\), \({S}_{2}\) and \(C\) with a constant value of \({\nu }_{\rm e}\), \({\psi }_{x}\), \({\psi }_{y}\), \(\phi \) may be estimated by linear curves in the \({S}_{1}-\mathrm{ln}q\), \({S}_{2}-\mathrm{ln}q\) and \(C-\mathrm{ln}q\) planes, respectively. Thus,
where \({s}_{11}\), \({s}_{12}\), \({s}_{21}\), \({s}_{22}\), \({c}_{1}\) and \({c}_{2}\) are numerically presented in Tables 8 and 9 for SSSS and CCCC plates, respectively. The method of linear least squares (LLS) is applied in two stages on the results with \(\phi =1, 1.5, 2, 4\), \({\psi }_{x}\), \({\psi }_{y}=-1, -0.5, 0, 0.5, 1\), \(q=2, 3, 5, 10, 15, 20\) and \({\nu }_{\rm e}=0.33\) to find \({S}_{1}\), \({S}_{2}\) and \(C\) as well as \({s}_{ij} \left(i,j=1, 2\right)\) and \({c}_{i} \left(i=1, 2\right)\). If \({\psi }_{x}={\psi }_{y}=-1\), then no shear buckling occurs in the plate, and this case is naturally eliminated. In Tables 8 and 9, \(\stackrel{-}{q}\) is the smallest integer of \(q\), so that \(R<0.999\). Therefore, if \(q<\stackrel{-}{q}\) (i.e., \(R\ge 0.999\)), then the linear approximation must be considered and vice versa.
Substituting Eq. (49) into Eq. (48), qth-order equations will be obtained (Eq. (51)) which can be solved by a trial and error method and usual scientific calculators. It can be shown that each of them always has a positive root which is the acceptable \({k}_{s},\)
where
and
The semi-analytical approach can be summarized by a step-by-step procedure as follows:
-
1.
Select \({s}_{ij} \left(i,j=1, 2\right)\), \({c}_{i} \left(i=1, 2\right)\) and \(\stackrel{-}{q}\) from Tables 8 and 9 according to the boundary conditions and \({\nu }_{\rm e}\), \({\psi }_{x}\), \({\psi }_{y}\) and \(\phi \). In this study, the fundamental parameters \(\left({s}_{ij} \& {c}_{i}\right)\) are obtained for SSSS and CCCC plates with \({\nu }_{\rm e}=0.33\), \(\phi =1, 1.5, 2 \& 4\) and \({\psi }_{x},{\psi }_{y}=-1, -0.5, 0, 0.5 \& 1\) except \({\psi }_{x}={\psi }_{y}=-1\). It is evident that the fundamental parameters can also be found for the other states.
-
2.
If \(q<\stackrel{-}{q}\), then
-
2.1
using the first equation of Eqs. (50), \({S}_{1}\) is calculated.
-
2.2
using Eq. (52), \(A\) is calculated by the known parameters: \(\frac{E}{{\sigma }_{.7E}}\), \(\Omega \), \(\lambda \), \({\nu }_{\rm e}\) and \(q\).
-
2.3
using the first equation of Eqs. (51), \({k}_{s}\) is calculated by trial and error.
-
2.1
-
3.
If \(q\ge \stackrel{-}{q}\), then
-
3.1
\(S_{1}\), \(S_{2}\) and \(C\) are calculated using Eq. (50) and then \(\stackrel{-}{\xi }=\frac{C}{{S}_{1}-{S}_{2}}\).
-
3.2
Using Eqs. (52) and (53), \(A\) and \(\stackrel{-}{A}\) are calculated, respectively, by the known parameters: \(\frac{E}{{\sigma }_{.7E}}\), \(\Omega \), \(\lambda \), \({\nu }_{\rm e}\) and \(q\).
-
3.3
If \(A\le \stackrel{-}{A}\), then the first equation of Eqs. (51) is solved and \({k}_{s}\) is calculated by trial and errors.
-
3.4
If \(A>\stackrel{-}{A}\), then the second equation of Eqs. (51) is solved and \({k}_{s}\) is calculated by trial and error.
-
3.1
Note that if \(q=2\) or \(q=3\), Eq. (51) has explicit solutions.
The shown examples in Table 3 and the second section of Table 6 are resolved using the suggested step-by-step procedure. Table 10 shows the obtained results for which the differences are less than 3%. In this table, for CCCC and SSSS plates, \(\xi >0.8\) and \(\xi >0.6\) are shown in Figs. 6 and 7, respectively. The semi-analytical method is also applied for SSSS and CCCC plates with four aspect ratios and load ratios (TTS, CTS, TCS and CCS) as shown in Tables 11 and 12, respectively. In these examples, the required Ramberg–Osgood parameters are \(q=10\) and \(\frac{E}{{\sigma }_{.7E}}=100\). For each aspect ratio in SSSS and CCCC plates, a maximum of four thickness ratios \(\left({\lambda }_{i},i=1, 2, 3, 4\right)\) are selected provided that \({\lambda }_{i}=5\left(j+1\right); j=1, 2, 3,\dots \) and:
-
\({\lambda }_{1}\) is the last \(\lambda \) where \({\xi }_{1}\le 0.2\), otherwise is the first \(\lambda \) where \(0.2\le {\xi }_{1}\le 0.3\).
-
\({\lambda }_{2}\) is the first \(\lambda \) where \(0.3\le {\xi }_{2}\le 0.5\).
-
\({\lambda }_{3}\) is the first \(\lambda \) where \(0.6\le {\xi }_{3}\le 0.8\).
-
\({\lambda }_{4}\) is the first \(\lambda \) where \(0.9\le {\xi }_{4}\le 1\).
Tables 11 and 12 show that the difference between two methods are less than 12% for all examples. For each loading state, the maximum difference (M.D.) appears as follows:
-
TTS loading: 10% < M.D. < 12% where \(0.1\le \xi \le 0.2\) for all plates.
-
CTS loading: 5% < M.D. < 7% where \(0.1\le \xi \le 0.2\) for SSSS plates and 5% < M.D. < 8% where \(0.1\le \xi \le 0.2\) for CCCC plates.
-
TCS loading: 7% < M.D. < 11% where \(0.1\le \xi \le 0.3\) for SSSS plates and 8% < M.D. < 10% where \(0.1\le \xi \le 0.2\) for CCCC plates.
-
CCS loading: 2% < M.D. < 10% where \(0.4\le \xi \le 0.7\) for SSSS plates and 8% < M.D. < 10% where \(0.2\le \xi \le 0.3\) for CCCC plates.
In addition, the results show that increasing the thickness ratio in each aspect ratio, the differences are usually decreased. As a result, the semi-analytical method has better accuracy for \(\lambda >70\) in TTS loading and \(\lambda >20\) in CTS, TCS and CCS loadings. Of course, if \(\frac{E}{{\sigma }_{.7E}}\), \(q\), \({\psi }_{x}\) and \({\psi }_{y}\) are changed, the differences may vary slowly.
4 Conclusion
An analytical approach is presented to obtain the inelastic buckling coefficient of simply supported and fully clamped rectangular plates subjected to combined biaxial (both compressive and tensile) and shear loads. The deformation theory of plasticity, variations to all mechanical properties of plate, the generalized integral transform technique (GITT) and eigenvalue solution are applied in the different sequences to obtain the inelastic buckling coefficient of plate. The Ramberg–Osgood parameters are used to describe the nonlinear stress–strain behavior of material, although the solution can be generalized for the other nonlinear behaviors. Then, applying the method of linear least squares (LLS) on the obtained results, a semi-analytical solution is also proposed. An approximate polynomial equation is obtained and solved by trial and error method to simplify the calculation of the inelastic buckling coefficient. The proposed semi-analytical solution is simple and applicable for the practical purposes. The calculated results show that good accuracy may be obtained for all loading cases, so that the maximum difference (< 12%) is seen in tensile–tensile–shear loading state; nevertheless, increasing thickness ratio of plate, the accuracy increases.
Abbreviations
- a :
-
Length of plate
- b :
-
Width of plate
- h :
-
Number of series terms in the GITT
- \(k_{s} ,k_{x}\) :
-
Inelastic buckling coefficients
- \(k_{s}^{e} ,k_{x}^{e}\) :
-
Elastic buckling coefficients
- m, n, r, s :
-
Positive integers
- q :
-
Shape parameter to describe the curvature of stress–strain curve in the Ramberg–Osgood representation
- \(\overline{q}\) :
-
Integer of corresponding q in the boundary of linear and bilinear approximations (\(R = 0.999\))
- \(s_{ij} ,c_{i}\) :
-
Fundamental parameters to find \(S_{1}\), \(S_{2}\) and \(C\) (i, j = 1, 2)
- t :
-
Thickness of plate
- z :
-
Distance from the middle surface of plate
- \(C\) :
-
Intercept of the second line in bilinear approximation of \(k_{s} - \xi\) curve
- \(D_{ij}\) :
-
Arrays of stiffness matrix (i, j = 1, 2, 3)
- \(E\) :
-
Young’s modulus (or the slop of stress–stain curve at zero stress)
- \(E_{{\rm sec}}\) :
-
Secant modulus
- \(E_{{\rm tan}}\) :
-
Tangent modulus
- \(M_{mn}^{rs}\) :
-
Arrays of coefficient matrix (m, n, r, s = 1, 2, …, h)
- \(N_{x}\), \(N_{y}\), \(N_{xy}\) :
-
In-plane loads in the x-, y- and xy-directions per unit length
- \(R\) :
-
Correlation coefficient of linear approximation in linear least squares
- \(S_{1}\), \(S_{2}\) :
-
Slope of the first and the second line for approximation of \(k_{s} - \xi\) curve
- \(X_{m} \left( x \right)\), \(Y_{n} \left( y \right)\) :
-
Kernels of double integral transform in x- and y-direction (m, n = 1, 2, …, h)
- \(\alpha_{m}\), \(\beta_{n}\) :
-
Roots of transcendental beam frequency equations in x- and y- directions (m, n = 1, 2, …, h)
- \(\gamma\) :
-
Shear strain
- \(\delta w\left( {x,y} \right)\) :
-
Variation of out of plane displacements in z- direction
- \(\delta w_{mn}\) :
-
Variation of transformed out of plane displacements (m, n = 1, 2, …, h)
- \(\delta M_{x}\), \(\delta M_{y}\) :
-
Variation of bending moments in the x- and y-directions per unit length
- \(\delta M_{xy}\) :
-
Variation of twisting moment per unit length
- \(\delta \gamma_{0}\) :
-
Variation of middle surface shear strain
- \(\delta \varepsilon_{0x}\), \(\delta \varepsilon_{0y}\) :
-
Variation of middle surface strains in x- and y-directions
- \(\delta \kappa_{x}\), \(\delta \kappa_{y}\) :
-
Variation of curvatures in x- and y-directions
- \(\delta \kappa_{xy}\) :
-
Variation of twist
- \(\delta \sigma_{x}\), \(\delta \sigma_{y}\) :
-
Variation of stresses in x- and y-directions
- \(\delta \tau\) :
-
Variation of shear stress
- \(\varepsilon_{x}\), \(\varepsilon_{y}\) :
-
Strain in x- and y-directions
- \(\xi\) :
-
Secant modulus-to-Young’s modulus ratio
- \(\eta\) :
-
Tangent modulus-to-Secant modulus ratio
- \(\lambda\) :
-
Thickness ratio of plate
- \(\nu\) :
-
Poisson’s ratio
- \(\nu_{\rm e}\) :
-
Elastic Poisson’s ratio
- \(\sigma_{.7E}\) :
-
Stress corresponding to intersection of the stress–strain curve and a secant of 0.7E in Ramberg–Osgood representation
- \(\sigma_{i}\) :
-
Stress intensity
- \(\sigma_{x}\), \(\sigma_{y}\) :
-
Stresses in x- and y-directions
- \(\tau\) :
-
Shear stress
- \(\sigma_{{x,{\text{cr}}}}\), \(\tau_{{{{\rm cr}}}}\) :
-
Critical stresses
- \(\phi\) :
-
Aspect ratio of plate
- \(\psi_{x}\), \(\psi_{y}\), \(\overline{\psi }_{y}\), \(\overline{\psi }_{xy}\) :
-
Load ratios
References
Ilyushin, A.A.: The elastic–plastic stability of plates. NACA, Technical Memorandum, No. 1188 (1947)
Stowell, E.Z.: A unified theory of plastic buckling. NACA, Technical Note, No. 1556 (1948)
Bijlaard, P.P.: Theory and tests on the plastic stability of plates and shells. J. Aeronaut. Sci. 16(9), 529–541 (1949). https://doi.org/10.2514/8.11851
Handelman, G., Prager, W.: Plastic buckling of a rectangular plate under edge thrusts. NACA, Technical Note, No. 1530 (1948)
Budiansky, B.: A reassessment of deformation theories of plasticity. J. Appl. Mech. 26(2), 259 (1959)
Jones, R.M.: Deformation Theory of Plasticity. Bull Ridge Corporation (2009)
Hutchinson, J.W.: Plastic buckling. Adv. Appl. Mech. 14, 67–144 (1974). https://doi.org/10.1016/S0065-2156(08)70031-0
Guarracino, F.: Remarks on the stability analysis of some thin-walled structures in the elastic–plastic range. Thin-Walled Struct. 138, 208–214 (2019). https://doi.org/10.1016/j.tws.2019.01.044
Becque, J.: The application of plastic flow theory to inelastic column buckling. Int. J. Mech. Sci. 111–112, 116–124 (2016). https://doi.org/10.1016/j.ijmecsci.2016.04.005
Hutchinson, J.W., Budiansky, B.: Analytical and numerical study of the effects of initial imperfections on the inelastic buckling of a cruciform column. In: Budiansky, B. (ed.) Buckling of structures, pp. 98–105. Springer, Berlin (1976). https://doi.org/10.1007/978-3-642-50992-6_10
Onat, E.T., Drucker, D.C.: Inelastic instability and incremental theories of plasticity. J. Aeronaut. Sci. 20(3), 181–186 (1953). https://doi.org/10.2514/8.2585
Guarracino, F., Simonelli, M.G.: The torsional instability of a cruciform column in the plastic range: analysis of an old conundrum. Thin-Walled Struct. 113, 273–286 (2017). https://doi.org/10.1016/j.tws.2016.11.007
Shamass, R., Alfano, G., Guarracino, F.: A numerical investigation into the plastic buckling paradox for circular cylindrical shells under axial compression. Eng. Struct. 75, 429–447 (2014). https://doi.org/10.1016/j.engstruct.2014.05.050
Shamass, R., Alfano, G., Guarracino, F.: An investigation into the plastic buckling paradox for circular cylindrical shells under non-proportional loading. Thin-Walled Struct. 95, 347–362 (2015). https://doi.org/10.1016/j.tws.2015.07.020
Shamass, R.: Plastic buckling paradox: an updated review. Front. Built Environ. (2020). https://doi.org/10.3389/fbuil.2020.00035
Pifko, A., Isakson, G.: A finite-element method for the plastic buckling analysis of plates. AIAA J. 7(10), 1950–1957 (1969). https://doi.org/10.2514/3.5487
Bradford, M.A., Azhari, M.: Inelastic local buckling of plates and plate assemblies using bubble functions. Eng. Struct. 17(2), 95–103 (1995). https://doi.org/10.1016/0141-0296(95)92640-T
Ibearugbulem, O., Eziefula, U., Onwuka, D.: Inelastic stability analysis of uniaxially compressed flat rectangular isotropic CCSS plate. Int. J. Appl. Mech. Eng. 20(3), 637–645 (2015). https://doi.org/10.1515/ijame-2015-0042
Ibearugbulem, O., Onwuka, D., Eziefula, U.: Inelastic buckling analysis of axially compressed thin CCCC plates using Taylor–Maclaurin displacement function. Acad. Res. Int. 4(6), 594 (2013)
Onwuka, D., Eziefula, U., Ibearugbulem, O.: Inelastic buckling of rectangular panel with a simply supported edge and three clamped edges under uniaxial loads. Int. J. Appl. Sci. Eng. 14(1), 39–48 (2016). https://doi.org/10.6703/IJASE.2016.14(1).39
Eziefula, U., Onwuka, D., Ibearugbulem, O.: Work principle in inelastic buckling analysis of axially compressed rectangular plates. World J. Eng. (2017). https://doi.org/10.1108/WJE-12-2016-0171
Shrivastava, S.C.: Inelastic buckling of plates including shear effects. Int. J. Solids Struct. 15(7), 567–575 (1979). https://doi.org/10.1016/0020-7683(79)90084-2
Guran, A., Rimrott, F.P.J.: Application of funicular polygon method to inelastic buckling analysis of plates. Comput. Methods Appl. Mech. Eng. 76(2), 157–170 (1989). https://doi.org/10.1016/0045-7825(89)90093-5
Lau, S.C.W., Hancock, G.J.: Inelastic buckling analyses of beams, columns and plates using the spline finite strip method. Thin-Walled Struct. 7(3), 213–238 (1989). https://doi.org/10.1016/0263-8231(89)90026-8
Rio, G.: Inelastic buckling of plate. Arch. Mech. 44(1), 105–116 (1992)
Azhari, M., Bradford, M.A.: Inelastic initial local buckling of plates with and without residual stresses. Eng. Struct. 15(1), 31–39 (1993). https://doi.org/10.1016/0141-0296(93)90014-U
Wang, C.M., Xiang, Y., Chakrabarty, J.: Elastic/plastic buckling of thick plates. Int. J. Solids Struct. 38(48), 8617–8640 (2001). https://doi.org/10.1016/S0020-7683(01)00144-5
Wang, C.M., Aung, T.M.: Plastic buckling analysis of thick plates using p-Ritz method. Int. J. Solids Struct. 44(18), 6239–6255 (2007). https://doi.org/10.1016/j.ijsolstr.2007.02.026
Lotfi, S., Azhari, M., Heidarpour, A.: Inelastic initial local buckling of skew thin thickness-tapered plates with and without intermediate supports using the isoparametric spline finite strip method. Thin-Walled Struct. 49(11), 1475–1482 (2011). https://doi.org/10.1016/j.tws.2011.07.013
Zhang, W., Wang, X.: Elastoplastic buckling analysis of thick rectangular plates by using the differential quadrature method. Comput. Math. Appl. 61(1), 44–61 (2011). https://doi.org/10.1016/j.camwa.2010.10.028
Kasaeian, S., Azhari, M., Heidarpour, A., Hajiannia, A.: Inelastic local buckling of curved plates with or without thickness-tapered sections using finite strip method. Int. J. Steel Struct. 12(3), 427–442 (2012). https://doi.org/10.1007/s13296-012-3011-9
Jaberzadeh, E., Azhari, M., Boroomand, B.: Inelastic buckling of skew and rhombic thin thickness-tapered plates with and without intermediate supports using the element-free Galerkin method. Appl. Math. Model. 37(10), 6838–6854 (2013). https://doi.org/10.1016/j.apm.2013.01.055
Kadkhodayan, M., Maarefdoust, M.: Elastic/plastic buckling of isotropic thin plates subjected to uniform and linearly varying in-plane loading using incremental and deformation theories. Aerosp. Sci. Technol. 32(1), 66–83 (2014). https://doi.org/10.1016/j.ast.2013.12.003
Maarefdoust, M., Kadkhodayan, M.: Elastoplastic buckling analysis of rectangular thick plates by incremental and deformation theories of plasticity. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 229(7), 1280–1299 (2015). https://doi.org/10.1177/0954410014550047
Maarefdoust, M., Kadkhodayan, M.: Elastic/plastic buckling analysis of skew plates under in-plane shear loading with incremental and deformation theories of plasticity by GDQ method. J. Braz. So. Mech. Sci. Eng. 37(2), 761–776 (2015). https://doi.org/10.1007/s40430-014-0203-6
Gerard, G., Wildhorn, S.: A study of Poisson’s ratio in the yield region. NACA, Technical Note, No. 2561 (1952)
Ramberg, W., Osgood, W.: Description of stress–strain curves by three parameters. NACA, Technical Note, No. 902 (1943)
Durban, D.: Plastic buckling of rectangular plates under biaxial loading. In: Elishakoff, I. (ed.) Studies in Applied Mechanics, pp. 183–194. Elsevier, Amsterdam (1988). https://doi.org/10.1016/B978-0-444-70474-0.50013-6
Ore, E., Durban, D.: Elastoplastic buckling of annular plates in pure shear. J. Appl. Mech. 56(3), 644–651 (1989). https://doi.org/10.1115/1.3176141
Durban, D., Zuckerman, Z.: Elastoplastic buckling of rectangular plates in biaxial compression/tension. Int. J. Mech. Sci. 41(7), 751–765 (1999). https://doi.org/10.1016/S0020-7403(98)00055-1
Betten, J., Shin, C.H.: Elastic–plastic buckling analysis of rectangular plates subjected to biaxial loads. Forsch. Ingenieurwes. 65(9), 273–278 (2000). https://doi.org/10.1007/s100109900023
Kosel, F., Bremec, B.: Elastoplastic buckling of circular annular plates under uniform in-plane loading. Thin-Walled Struct. 42(1), 101–117 (2004). https://doi.org/10.1016/S0263-8231(03)00126-5
Wang, X., Huang, J.: Elastoplastic buckling analyses of rectangular plates under biaxial loadings by the differential qudrature method. Thin-Walled Struct. 47(1), 14–20 (2009). https://doi.org/10.1016/j.tws.2008.04.006
Ahmed, M.Z., DaDeppo, D.A.: Stress distribution and buckling stress of plates including edge contact-frictional force effects. Int. J. Solids Struct. 31(14), 1967–1979 (1994). https://doi.org/10.1016/0020-7683(94)90202-X
Gjelsvik, A., Lin, G.: Plastic buckling of plates with edge frictional shear effects. J. Eng. Mech. 113(7), 953–964 (1987). https://doi.org/10.1061/(ASCE)0733-9399(1987)113:7(953)
Yao, Z., Rasmussen, K.J.R.: Inelastic local buckling behaviour of perforated plates and sections under compression. Thin-Walled Struct. 61, 49–70 (2012). https://doi.org/10.1016/j.tws.2012.07.002
Azhari, M., Saadatpour, M.M., Bradford, M.A.: Inelastic local buckling of flat, thin-walled structures containing thickness-tapered plates. Thin-Walled Struct. 42(3), 351–368 (2004). https://doi.org/10.1016/j.tws.2003.09.002
Samadi Dinani, A., Azhari, M., Sarrami Foroushani, S.: Elastic and inelastic buckling analysis of thick isotropic and laminated plates using finite layer method. Civ. Eng. Res. J. (2017). https://doi.org/10.19080/CERJ.2017.02.555593
Alinia, M.M., Gheitasi, A., Erfani, S.: Plastic shear buckling of unstiffened stocky plates. J. Constr. Steel Res. 65(8), 1631–1643 (2009). https://doi.org/10.1016/j.jcsr.2009.04.001
Alinia, M.M., Soltanieh, G., Amani, M.: Inelastic buckling behavior of stocky plates under interactive shear and in-plane bending. Thin-Walled Struct. 55, 76–84 (2012). https://doi.org/10.1016/j.tws.2012.03.007
Smith, S.T., Bradford, M., Oehlers, D.J.: Inelastic buckling of rectangular steel plates using a Rayleigh–Ritz method. Int. J. Struct. Stab. Dyn. 3(04), 503–521 (2003). https://doi.org/10.1142/S021945540300102
Uenoya, M., Redwood, R.G.: Elasto-plastic shear buckling of square plates with circular holes. Comput. Struct. 8(2), 291–300 (1978). https://doi.org/10.1016/0045-7949(78)90036-6
Wang, C., Aung, T.M., Kitipornchai, S., Xiang, Y.: Plastic-buckling of rectangular plates under combined uniaxial and shear stresses. J. Eng. Mech. 135(8), 892–895 (2009). https://doi.org/10.1061/(ASCE)0733-9399(2009)135:8(892)
Green, A.E.: Double Fourier series and boundary value problems. Math. Proc. Camb. Philos. Soc. 40(3), 222–228 (1944). https://doi.org/10.1017/S0305004100018375
Kennedy, J.B., Prabhakara, M.K.: Buckling of simply supported orthotropic skew plates. Aeronaut. Q. 29(3), 161–174 (1978). https://doi.org/10.1017/S0001925900008428
Li, R., Zhong, Y., Tian, B., Du, J.: Exact bending solutions of orthotropic rectangular cantilever thin plates subjected to arbitrary loads. Int. Appl. Mech. 47(1), 107–119 (2011). https://doi.org/10.1007/s10778-011-0448-z
Li, R., Zhong, Y., Tian, B., Liu, Y.: On the finite integral transform method for exact bending solutions of fully clamped orthotropic rectangular thin plates. Appl. Math. Lett. 22(12), 1821–1827 (2009). https://doi.org/10.1016/j.aml.2009.07.003
Tian, B., Li, R., Zhong, Y.: Integral transform solutions to the bending problems of moderately thick rectangular plates with all edges free resting on elastic foundations. Appl. Math. Model 39(1), 128–136 (2015). https://doi.org/10.1016/j.apm.2014.05.012
Tian, B., Zhong, Y., Li, R.: Analytic bending solutions of rectangular cantilever thin plates. Arch. Civ. Mech. Eng. 11(4), 1043–1052 (2011). https://doi.org/10.1016/S1644-9665(12)60094-6
Zhang, S., Xu, L.: Bending of rectangular orthotropic thin plates with rotationally restrained edges: a finite integral transform solution. Appl. Math. Model. 46, 48–62 (2017). https://doi.org/10.1016/j.apm.2017.01.053
Guerrero, J.S.P., Cotta, R.M.: Integral transform solution for the lid-driven cavity flow problem in stream function-only formulation. Int. J. Numer. Methods Fluids 15(4), 399–409 (1992). https://doi.org/10.1002/fld.1650150403
An, C., Gu, J.-J., Su, J.: Integral transform solution of bending problem of clamped orthotropic rectangular plates. In: International Conference on Mathematics and Computational Methods Applied to Nuclear Science and Engineering (M & C). 2011. Rio de Janeiro, RJ, Brazil: American Nuclear Society (ANS).
Ullah, S., Zhong, Y., Zhang, J.: Analytical buckling solutions of rectangular thin plates by straightforward generalized integral transform method. Int. J. Mech. Sci. 152, 535–544 (2019). https://doi.org/10.1016/j.ijmecsci.2019.01.025
Zhang, J., Zhou, C., Ullah, S., Zhong, Y., Li, R.: Two-dimensional generalized finite integral transform method for new analytic bending solutions of orthotropic rectangular thin foundation plates. Appl. Math. Lett. 92, 8–14 (2019). https://doi.org/10.1016/j.aml.2018.12.019
He, Y., An, C., Su, J.: Generalized integral transform solution for free vibration of orthotropic rectangular plates with free edges. J. Braz. Soc. Mech. Sci. Eng. 42(4), 183 (2020). https://doi.org/10.1007/s40430-020-2271-0
Python Language Reference: Python Software Foundation. http://www.python.org (2019)
Pride, R., Heimerl, G.: Plastic buckling of simply supported compressed plates. NACA, Technical Note, No. 1817 (1948)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
All authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix 1: Linear/bilinear approximation of \({{\varvec{k}}}_{{\varvec{s}}}={\varvec{f}}\left({\varvec{\xi}};{\varvec{\phi}},{{\varvec{\psi}}}_{{\varvec{x}}},{{\varvec{\psi}}}_{{\varvec{y}}},{\varvec{q}},{{\varvec{\nu}}}_{{\varvec{e}}}\right)\)
Supposing the boundary conditions of the plate and the specific values for \(0<{\nu }_{\rm e}<0.5\), \(1\le \phi \le 4\), \(-1\le {\psi }_{x}\le 1\), \(-1\le {\psi }_{y}\le 1\) and \(2\le q\le 20\), the suggested algorithm (Fig. 2) is applied and several examples may be solved to obtain the curves of \({k}_{s}-\xi \). Figures 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18 and 19 show the obtained curves for some examples in which the curves of SSSS and CCCC plates are drawn in Figs. 8, 9, 10, 11, 12 and 13 and Figs. 14, 15, 16, 17, 18 and 19, respectively. In these figures, \({\nu }_{\rm e}=0.33\), \(\phi =1, 1.5, 2, 4\), \({\psi }_{x}=-0.5, 1\), \({\psi }_{y}=-1, 1\) and \(q=3, 10, 20\). Initially, the method of linear least squares (LLS) is used and the correlation coefficient (R) of linear estimation is obtained for each curve as shown in Figs. 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18 and 19. If \(R\ge 0.999\) the linear estimation is proposed; otherwise, the bilinear estimation (Eq. (49)) is used to improve the approximation. In Figs. 8, 9, 10, 11, 12, 13, 14, 15, 16, 17, 18 and 19, the linear/bilinear approximations are only plotted for \(\phi =1\) (the dashed lines). Similarly approximated curves can be evidently plotted for the other aspect ratios. Supposing constant values of \(q\) and \(\phi \) and increasing \({\psi }_{x}\) and \({\psi }_{y}\), the linear estimations are mostly converted to the bilinear estimations. If \(R=0.999\), the boundary of conversion is found for which only the integer value of the corresponding \(q\) is considered (\(\stackrel{-}{q}\) in Tables 8, 9). For example, if \(\phi =4\) and \({\psi }_{x}=\) \({\psi }_{y}=1\), then \(\stackrel{-}{q}=5\) for SSSS plates; thus, if \(q=3\) or \(q=10\), then \(R=0.9996\) (linear estimation, Fig. 9) or \(R=0.9964\) (bilinear estimation, Fig. 11) respectively.

Linear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Bilinear and linear approximations of the \({k}_{s}-\xi \) curves for \(\phi =1, 1.5, 2\) and \(\phi =4\) respectively

Linear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Bilinear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Linear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Bilinear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Linear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Bilinear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Linear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Bilinear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Linear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios

Bilinear approximations of the \({k}_{s}-\xi \) curves for all aspect ratios
Appendix 2: Semi-logarithm estimation of \({{\varvec{S}}}_{1}\), \({{\varvec{S}}}_{2}\) and \({\varvec{C}}\)
In Appendix 1 and Eq. (49), a bilinear approximation is described with slopes of both lines (\({S}_{1}\) and \({S}_{2}\)) and intercept of the second line (\(C\)), while a linear approximation is only described with the slope of one line (\({S}_{1}\)). Reapplying the method of linear least squares (LLS) on several examples, \({S}_{1}\), \({S}_{2}\) and \(C\) can be linearly estimated versus \(\mathrm{ln}q\). Figures 20–23 and 24–27 show the estimations for SSSS and CCCC plates, respectively. If linear approximation is applied on the \({k}_{s}-\xi \) curves, then \({S}_{1}\) is only estimated as shown in Figs. 20 and 24 (\({\psi }_{x}=-0.5\), \({\psi }_{y}=-1\)); if bilinear approximation is applied, then \({S}_{1}\) (Figs. 21, 25), \({S}_{2}\) (Figs. 22, 26) and \(C\) (Figs. 23, 27) are estimated (\({\psi }_{x}={\psi }_{y}=1\)). Equation (54) shows the semi-logarithm estimation,
where \({s}_{11}\), \({s}_{21}\) and \({c}_{1}\) are the slopes and \({s}_{12}\), \({s}_{22}\) and \({c}_{2}\) are the intercept of the \({S}_{1}\), \({S}_{2}\) and \(C\) curves, respectively. For SSSS plates with \(\phi =1\), \({\psi }_{x}=-0.5\) and \({\psi }_{y}=-1\), Fig. 20 shows that \({s}_{11}=-1.294\) and \({s}_{12}=117.37\). Similarly, the parameters of Eq. (54) will be obtained for the different boundary and load conditions as shown in Tables 8 and 9. The obtained correlation coefficients show that the semi-logarithm estimation is acceptable in this step.








Rights and permissions
About this article

Cite this article
Jahanpour, A., Kouhia, R. An explicit solution for inelastic buckling of rectangular plates subjected to combined biaxial and shear loads. Acta Mech 232, 1641–1682 (2021). https://doi.org/10.1007/s00707-020-02926-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-020-02926-x