
Abstract
This paper investigates the distributed cooperative learning (DCL) from adaptive neural network (NN) control for a group of strict-feedback systems, where the structure of all strict-feedback systems is identical. In order to achieve DCL easily, the system transformation method is employed for the strict-feedback systems. For an agent, only one radial basis function NN is used to approximate the lumped uncertainty in control design. Then the output tracking performance of all strict-feedback systems is guaranteed. What’s more, we prove that weights of all NNs in a multi-agent system converge to a small neighborhood around their common optimal value if the topology of the multi-agent system is connected and undirected. Thus, the approximation domain of all NNs is enlarged. Further, the previous learned NNs are used to improve the control performance. Finally, we provide two examples to demonstrate the effectiveness of the proposed scheme.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Over the past two decades, the study on control of strict-feedback systems has received considerable attention (for instance, see [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23,24,25]) due to such systems have wide applications, such as flexible joint robots, marine vehicles, and spacecrafts. In general, adaptive neural backstepping design as one of the most powerful techniques is often employed to address the control problem of strict-feedback systems, in which neural networks (NNs) are used to approximate unknown nonlinear uncertainties over compact sets. However, in the early works [4, 5], to name just a few, the computational burden exponentially increases as the system order n grows, which is so-called the explosion of complexity. The main reason is that there exists the repeated differentiations of virtual controllers.
The problem of the explosion of complexity is overcome by proposing a dynamic surface control (DSC) technique [26]. At each backstepping step, a first-order filter is introduced to eliminate the repeated differentiation of virtual controllers and the related works on this technique are found in [27] and [28]. Combining the DSC technique and backstepping, adaptive neural control of nonlinear systems is extensively studied [18,19,20,21,22,23,24,25]. In [18], adaptive neural control design is presented for strict-feedback systems by applying the DSC technique. This work avoids the problem of differentiation of NNs in the traditional adaptive neural backstepping design. In [19], the authors study the robust adaptive NN tracking control by combining minimal learning parameter (MLP) methods and DSC, in which the number of parameters adjusted online is effectively reduced as well. In [21], a novel predictor-based neural DSC method is proposed, which systematically improves transient performance of closed-loop systems. Furthermore, the consideration of global adaptive neural DSC [20], composite intelligent learning control [22], full state constraints [23], input saturation [24] and deterministic learning [25] is reported, respectively. Although the problem of explosion of complexity is eliminated in above studies, many approximators are still used in recursive backstepping design. The work in [29] proposes a new method that transforms the strict-feedback system into a normal form. Thus, the control problem of strict-feedback systems can be viewed as an output feedback control problem and only one NN is used to approximate the lumped uncertainty.
It should be noted that the stability analysis of the above works is mainly based on the Lyapunov methods. As approximators, the universal approximation ability of NNs is emphasized in adaptive neural control, but the learning ability is not revealed. NNs learn nothing after control process. As a result, the previously trained NNs cannot be reused to control the same or similar plants. In order to solve this problem, a deterministic learning mechanism is proposed in the pioneering work [30]. The authors prove that if the inputs of a radial basis function (RBF) NN are periodic or recurrent, then the regression vector satisfies the persistent excitation (PE) condition. Therefore, the RBF NN can store the knowledge after the control process and it can be reused without updating weights online. A lot of results on this mechanism are reported in recent years [25, 31,32,33,34,35,36]. In [25], with the help of the DSC technology, the authors study the learning problem of adaptive NN control of strict-feedback systems. Further, this mechanism is extended to affine systems [31], nonaffine systems [32] and pure-feedback nonlinear systems[33], respectively. In [34], dynamic learning with predefined control performance is investigated. In addition, several practical applications of the deterministic learning theory are explored in [34, 36], respectively.
Recently, inspired by the consensus theory of multi-agent systems, in [37], the authors propose a distributed cooperative learning (DCL) scheme and this approach enlarges the approximation domain of NNs compared with the deterministic learning mechanism. An important contribution in the work [37] is that the regression vectors of all agents in a multi-agent system satisfy the cooperative PE condition. Therefore, neural weights of all RBF NNs converge to a small neighborhood of their common optimal value. In [38], the output feedback control is considered for DCL if full states of plants are not measurable. With the help of the DCL scheme, in [39], the formation control is solved for a group of mechanical systems. It should be pointed out that the DCL scheme requires agents in multi-agent systems exchange the weight information with their neighboring agents. Thus, the DCL law with event-triggered communication is presented in [40] to overcome the continuous communication [37,38,39]. Although the DCL scheme is widely studied in recent years, deciding how to achieve DCL for a group of high-order strict-feedback systems is not explored because there are some challenges: (i) the problem of explosion of complexity, (ii) it is difficult to verify whether the inputs of NNs are periodic, and (iii) the learning objective is difficult to be achieved.
Because strict-feedback systems exist widely in practice, it is necessary to study cooperative learning control of such systems to improve the control performance. In this paper, in order to achieve DCL easily, we transform a group of strict-feedback systems into the normal form. Due to only one RBF NN is used to approximate the lumped uncertainty in an agent, it is easy to verify the inputs of NNs are recurrent signals and easy to achieve cooperative learning. Further, control performance is improved and computational burden is reduced in experience control.
The main contributions of this paper are listed as follows:
-
(i)
The cooperative learning control is addressed for a group of strict-feedback systems. Most of works on adaptive neural control of strict-feedback systems only focus on control performance. However, in this paper, both control performance and NN approximation performance are considered.
-
(ii)
In contrast to the existing works [25, 34], the RBF NNs obtained in this paper have a large common approximation domain. Thus, the generalization ability of RBF NNs is improved.
The rest of this paper is organized as follows. In Sect. 2, some preliminary knowledge is provided. Section 3 presents problem formulation and the DCL control of strict-feedback systems. In Sect. 4, we discuss the NN control with past experience. Sect. 5 gives two examples to demonstrate the proposed scheme. Then the conclusions are reached in Sect. 6.
2 Preliminary
2.1 Kronecker product
Definition 1
[41]: Let \( A\in R^{p\times q}\) and \( B\in R^{m\times n}\). The Kronecker product of A and B is defined by
2.2 Graph theory
A graph is defined as \({\mathcal {G}}=({\mathcal {V,E,A}})\), where \({\mathcal {V}}=\{1 ,2,...,N\}\) is a set of vertices, \({\mathcal {E}}\subseteq {\mathcal {V\times V}}\) is a set of edges and the matrix \({\mathcal {A}}\) is the adjacency matrix of the graph. The elements of \({\mathcal {A}}\) are defined as \(a_{ij}=1\) in this paper if \((i,j)\in {\mathcal {E}}\) and \(a_{ij}=0\) otherwise. If for every \((j,i)\in {\mathcal {E}}\Leftrightarrow (i, j)\in {\mathcal {E}}\), the graph \({\mathcal {G}}\) is called the undirected graph. If there is a path from i to j, then i and j are connected. If all pairs are connected, then \({\mathcal {G}}\) is connected. The elements of the Laplacian matrix \({\mathcal {L}}\) of a graph are defined as \(l_{ii}= \sum _{j=1}^N a_{ij} \) and \(l_{ij}=-a_{ij} \) if \(i\ne j\). For an undirected graph, its Laplacian matrix \({\mathcal {L}}\) is symmetric and positive semidefinite, and if \((j,i)\in {\mathcal {E}}\), it means that vertices i and j can exchange information. For a connected graph, only one of the eigenvalues of its Laplacian matrix \({\mathcal {L}}\) is zero and the others are positive.
2.3 RBF NNs
In adaptive neural control, RBF NNs are used to approximate the continuous lumped uncertainties. Generally, for any continuous function f(X), it can be approximated by an RBF NN over a compact set, which is described by
where \(X\in \varOmega _{X}\subset R^{q}\) is the input vector of the RBF NN, \(S(X)=[s_{1}(X), \ldots , s_{l}(X)]^{T}\) is the regression vector, \(W=[w_{1},\ldots ,w_{l}]^{T}\) is the weight vector and \(\varepsilon (X)\) represents the approximation error. \(l>1\) is the number of neurons and \( s_{j}(X)=\exp \Big [-\frac{\Vert (X-\theta _{j})\Vert ^2 }{ \iota ^{2} }\Big ], j\in \{1,\ldots ,l\},\) is the Gaussian function, where \(\iota > 0 \) and \( \theta _j \in \varOmega _{X}\) are the width and center of the Gaussian function, respectively. If l is sufficient large, then there exists a ideal weight W such that the approximation error \(\varepsilon (X)\) can be made small enough [42, 43], i.e., \(|\varepsilon (X)|<\varepsilon ^{*}\), where \(\varepsilon ^{*}\) is a small positive constant.
It is pointed out in [30] that along a bounded trajectory \(\overline{X}(t)\subset \varOmega _X\), the continuous function \(f(\overline{X}(t))\) also can be approximated, which is described by
where \((\cdot )_{\varsigma }\) represents the region that is close to \(\overline{X}(t)\), \(W_\varsigma = [w_{l_1}, \ldots , w_{l_\varsigma }]^{T}\) is a subvector of W with \(l_\varsigma <l\), \(S_\varsigma (\overline{X}(t))=\mathbf [ {s_{l_1}(\overline{X}(t))},\ldots ,s_{l_\varsigma }(\overline{X}(t))\mathbf ] ^{T}\) is a subvector of \(S(\overline{X}(t))\), and \(\varepsilon _{\varsigma }(\overline{X}(t))\) is the new approximation error.
In a multi-agent system, assume that there are N agents (or N systems), we use \(X_{k}(t)\) to denote the trajectory of the \(k\hbox {th}\) subsystem. Further, we use \(\Psi \) denote the union trajectory of all agents, i.e., \(\Psi =X_{1}(t)\cup \cdots \cup X_{N}(t)=\cup _{k=1}^{N}X_k(t)\). In [37], the cooperative PE condition is explored for a group of regression vectors of RBF NNs. This is a key property to achieve the convergence of NN weights.
Lemma 1
(Cooperative PE Condition of RBF NNs) [37]: Assume that \(X_k(t), k=1, \ldots , N\) are periodic or recurrent. Let \(\mathcal {I}\) be a bounded \(\mu \)-measurable subset of \([0,\infty )\) (take \(\mathcal {I}=[t_0,t_0+T_0]\)), where \(T_0\) is the period of \(\Psi \). Then \(S_{\varsigma }(X_{k}(t)), k=1,\ldots ,N\) satisfy the cooperative PE condition, that is, there exists a positive constant \(\alpha \) such that
where \((\cdot )_{\varsigma }\) represents the region that is close to the trajectory \(\Psi (t)\).
3 Cooperative learning from adaptive neural control
3.1 Problem formulation
Consider a group of strict-feedback systems
where N is the number of strict-feedback systems (or the number of agents), n is the order of each strict-feedback system, \(\bar{x}_{k,n}=[x_{k,1}, \ldots , x_{k,n}]^{T}\in R^{n}\) is the system state vector, \(\bar{x}_{k,i}= [x_{k,1}, \ldots , x_{k,i}]^{T}\), and \(y_{k}\) is the system output. Suppose that the full states of each system are measurable. \(f_{i}(\cdots )\) and \(g_{i}(\cdots )\) are unknown smooth nonlinear functions of \(\bar{x}_{k,i}\). For further analysis, we need the following assumptions for systems (4).
Assumption 1
\(g_{i}(\cdot ),i=1, \cdots , n\), are bounded for all \(\bar{x}_{k,n}\in \varOmega \) and their signs are also known, where \(\varOmega \) is a compact set. Without losing generality, assume that \(g_{0}\le g_{i}(\cdots )\le g_{1}\) for \(i=1, \cdots , n\), where \(0<g_{0}\le g_{1}\) are positive constants.
Remark 1
Assumption 1 is standard and widely used in the literature, for example see [21, 25, 29, 34, 44]. It ensures that control direction is known and system (4) is controllable. Assumption 1 is only used for stability and convergence analysis. The controller design is not required.
In this paper, each strict-feedback system, and its reference model serve as an agent in a multi-agent system. Next, we introduce the reference models.
Consider the following reference models
where \(\bar{y}_{k,n}=[y_{k,1}, \ldots , y_{k,n}]^{T}\) is the state vector, \(y_{dk}\in R\) is the output and \(f_{dk}(\cdots )\) is a known smooth function. For the \(k\hbox {th}\) reference model, we use \(\varphi _{dk}\) to denote its orbit starting from the initial state \(\bar{y}_{k,n}(0)\). Let \(\varphi _{d}\) denote the union trajectory of all reference models, i.e., \(\varphi _{d}=\cup _{k=1}^{N}\varphi _{dk}\).
Notice that for all the strict-feedback systems (4), their system functions \(f_{i}(\cdots )\) and \(g_{i}(\cdots )\) are identical. But their reference models are different. Therefore, the goals of this paper have three aspects: (i) guarantee the tracking performance and the stability of the closed-loop systems, (ii) approximate the lumped uncertainties by using the cooperative learning method, and what’s more, obtain a large common approximation domain in multi-agent systems compared with [25, 34], and (iii) design the controllers with the learned RBF NNs to improve control performance.
Remark 2
In a multiagent system, each agent can exchange information with its neighbouring agents. Thus, the agent can learn the knowledge not only from itself but also from its neighbouring agents by communication. This is called “cooperative learning”. The cooperative learning is originally proposed in [37]. For more details on cooperative learning, we refer the reader to [37].
3.2 Neural controller design and stability analysis
For any system of (4), most of adaptive neural control methods based on the traditional backstepping need to use n NNs to approximate lumped uncertainties. As pointed out in [25, 29] and [34], computational complexity will exponentially increase as the order n grows. To avoid this, the authors in [29] propose a system transformation method, i.e., (4) can be transformed into the following nonlinear systems in a normal form,
where
and
Remark 3
The above transformation requires that \(f_{i}(\bar{x}_{k,i})\) and \(g_{i}(\bar{x}_{k,i})\) in (4) are smooth functions of \(\bar{x}_{k,i}\). This requirement is satisfied in many practical systems, such as robot manipulators [19] and unmanned surface vehicles [21, 44].
In what follows, we will control systems (6) such that \(y_{k}\) tracks the reference signal \(y_{dk}\) with a small error. Notice that the control target is the same as (4), which is not changed.
Although \(z_{k,1}\) and the full states of (4) are available for measurement, \(z_{k,i},i=2,\ldots , n,\) are not computable because the functions \(\textit{F}_{i}(\cdot ),\textit{G}_{i}(\cdot ),i=2,\ldots ,n\), are totally unknown. In this paper, we employ high-gain observers (HGOs) to estimate \(z_{k,i}\) of (6).
Lemma 2
(HGO) [45, 46]: Consider the linear systems as follows
where \(\epsilon _{k}\) is any small positive constant and \(p_{k,1}, p_{k,2}, \ldots , \) \( p_{k,n-1}\) are chosen such that the polynomial \(s^{n}+p_{k,1}s^{n-1}+\cdots +p_{k,n-1}s+1\) is Hurwitz. Assume that the function \(y_{k}(t),k=1,\ldots ,N\) and their first n derivatives are bounded. Then, there exist small positive constants \(h_{j}\), \(j=2, \ldots , n\), and \(T^{*}\) such that, for all \(t>T^{*}\),
where \(\psi _{k}=\zeta _{k,n}+p_{k,1}\zeta _{k,n-1}+\cdots +p_{k,n-1}\zeta _{k,1}\) and \(\psi ^{(j)}_{k}\) denotes the \(j\hbox {th}\) derivative of \(\psi _{k}\), and \(|\psi ^{(j)}_{k}|\le h_{j}\). \(\square \)
From (6), it can be seen that although the first n derivatives of \(y_{k}(t)\) include the unknown continuous functions \(f_{i}, g_{i}, F_{i}\) and \(G_{i}\), they are bounded if \(\bar{x}_{k,n}\) is bounded. In the Theorem 1, which will be stated later, we prove that all signals are bounded. Therefore, \(y_{k}(t)\) and its first n derivatives are bounded. By Lemma 2, we can use \({\zeta _{k,j+1}}/{\epsilon _{k}^{j}}\) to estimate \(z_{k,i}\) of (6). Let \(\hat{z}_{k,i}\) be the estimation of \(z_{k,i},i=2,\ldots ,n\) and \(\hat{z}_{k}=[\hat{z}_{k,1},\ldots ,\hat{z}_{k,n}]^{T}\). Then,
Based on [31, 34] and [38], we design the neural controllers of (6) as follows
where
with \(c_{k,1}, \ldots , c_{k,n}>0\) being control gains. \(\hat{W}_{k}\) and \(Z_{k,n}\) will be specified later.
Define the lumped uncertainty
where \(Z_{k,n}=[\bar{x}^{T}_{k,n}, \beta _{k}]^{T}\) and \(\beta _{k}=e_{k,n-1}-\dot{\alpha }_{k,n-1}\) Since \(H(Z_{k,n})\) is unknown, an RBF NN can approximate it, that is,
where \(Z_{k,n}\) is the NN input, W is the common optimal weight and \(\varepsilon _{k}\) is the approximation error. In this paper, each agent only uses one RBF NN, and their width and centers of the Gaussian functions of all RBF NNs are identical. Thus, the dimensions of \(S(\cdot )\) and W are identical for all agents although the inputs of \(S(\cdot )\) are different. Therefore, we define that W is the common optimal weight along the union orbit \(Z=\cup _{k=1}^{N}Z_{k,n}\) rather than along the orbit \(Z_{k,n}\).
Before the control process, the common optimal weight W is unknown. In control law (8), \(\hat{W}_{k}\) denotes the estimation of W in the \(k\hbox {th}\) agent (or system) and \(S(Z_{k,n})^{T}\hat{W}_{k}\) is employed to approximate the lumped uncertainty \(H(Z_{k,n})\) in the control process. From the above analysis, it can be seen that only one RBF NN is used in an agent and computational complexity is reduced effectively.
In order to achieve cooperative learning, design the NN weight update laws as follows
where \(\rho ,\sigma _{k},\gamma >0\) are the design parameters, \(a_{kj}>0\) means that the \(k\hbox {th}\) agent can receive the NN weight \(\hat{W}_{j}\) from the \(j\hbox {th}\) agent and \(a_{kj}=0\) means that there is no communication between the agents k and j. Based on the above analysis, one of the results is summarized as follows.
Theorem 1
Consider a multi-agent system consisting of systems (4) with Assumption 1, the reference models (5), the HGOs (7), the controllers (8) and weight update laws (15). Assume that the communication topology of the multi-agent system is undirected and connected. For any initial conditions \(\bar{x}_{k,n}(0)\in \varOmega _{k}\) (where \(\varOmega _{k}\) is a compact set), it holds that
-
(i)
All the signals in the multi-agent system are still bounded;
-
(ii)
The output tracking errors \(e_{k,1}= x_{k,1}-y_{k,1}, k=1,\ldots , N\), exponentially converges to a small neighborhood around zero by properly choosing design parameters. \(\square \)
Proof
(i) In order to show all the signals in the multi-agent system are still bounded, consider the following Lyapunov candidate
Let \(\tilde{W}_{k}=\hat{W}_{k}-W\). From (8)–(14) and (15), we deduce the closed-loop error system is that
The time derivative of V along (17) is that
where \(\tilde{W}=[\tilde{W}_{1}^{T},\ldots , \tilde{W}_{N}^{T}]^{T}\). Since the communication topology is undirected and connected, then the term \(\frac{\gamma }{\rho }\tilde{W}^{T}({\mathcal {L}}\otimes I_{l})\tilde{W}\) is always nonnegative. Notice that \(g_{0}\le g_{i}(\cdot )\le g_{1}\), then \(\underline{g}\le \textit{G}_{n}(\bar{x}_{k,n})\le \overline{g}\), where \(\underline{g}\) and \(\bar{g}\) are positive constants. According to the Young’s inequality, we have the following inequalities,
where \(\Vert S(Z_{k,n})\Vert \le s\), \(\sigma =\min \{\sigma _{1},\ldots ,\sigma _{N}\}\), and \(s,\varrho _{1},\varrho _{2}, \varrho _{3}\) are positive constants. By using (19), it follows that
Choosing the parameters \(c_{k,1}\) and \(c_{k,n}\) such that \(c_{k,1}=c_{k,1}'+{\varrho _{1}}/{2}\) and \(c_{k,n}\underline{g}=c_{k,n}'+{\varrho _{2}}/{2}+{\varrho _{3}}/{2}+{s^{2}}/{\sigma }+{s^{2}{\overline{g}}^{2}}/{\sigma }\), then we obtain that
where \(c=\min \{c_{k,1}',c_{k,2},\ldots , c_{k,n-1},c_{k,n}'\},k=1,\ldots ,N\), \(\delta \!=\!\min \{2c,{\rho \sigma }/{2}\}\) and \(\mu \!=\!\sum _{k=1}^{N}\Big ({\epsilon _{k}^{2}h_{k}^{2}}/{2\varrho _{1}}+{\epsilon _{k}^{2}h_{n+1}^{2}}/{2\varrho _{2}} \) \(+{{\overline{g}}^{2}\varepsilon ^{*2}}/{2\varrho _{3}}+\sigma _{k}\Vert W\Vert ^{2}\Big )\). From (21), we directly obtain
This implies that \(e_{k,j}, \tilde{W}_{k}, j=1,\ldots ,n, k=1,\ldots ,N\) are bounded. Further, \(\hat{W}_{k},\hat{z}_{k,j},z_{k,j}, x_{k,j},j=1, \ldots ,n, k=1,\ldots ,N\) are also bounded. The conclusion is reached.
(ii) In view of (16) and (22), one has
It is obvious that \(\frac{2\mu }{\delta }\) can be made small enough by properly choosing large \(c_{k,j}, j=1,\ldots ,n, k=1,\ldots ,N\) and small \(\sigma _{k}, k=1,\ldots ,N\). Thus \(e_{k,j}, j=1,\ldots ,n, k=1,\ldots ,N\), exponentially converge to a small neighborhood around zero after a finite time T. This means that tracking errors \(e_{k,1},k=1,\ldots ,N,\) exponentially converge to a small neighborhood around zero after a finite time T. The proof is completed. \(\square \)
3.3 Cooperative learning
In Theorem 1, the control objective is achieved. In what follows, the learning ability of RBF NNs will be illustrated. Note that the NN weight update law \(\dot{\hat{W}}_{k}\) contains the cooperative learning term \(-\gamma \sum _{j\in \mathcal {N}_{k}} a_{kj}(\hat{W}_{k}-\hat{W}_{j})\). This implies that any agent in the multi-agent system can learn the knowledge not only from itself but also from its neighboring agents. The following theorem shows that once the learning is completed, the common approximation domain is the union of all orbits of all agents.
Theorem 2
Consider a multi-agent system consisting of systems (4) with Assumptions 1, the reference models (5), the HGOs (7), the controllers (8) and weight update laws (15). Assume that the communication topology of the multi-agent system is undirected and connected. For any recurrent orbits \(\varphi _{dk}, k=1,\ldots ,N\) and any bounded initial conditions \(\bar{x}_{k,n}\in \varOmega _{k}\) (where \(\varOmega _{k}\) is a compact set), and \(\hat{W}_{k}=0\), the weight estimates \(\hat{W}_{k},k=1,\ldots ,N\) converge to a small neighborhood of W, and the lumped uncertainty \(H(Z_{k,n})\) can be approximated by \(S^{T}(Z)\overline{W}_{k}\) along the union orbit \(Z=\cup _{k=1}^{N}Z_{k,n}\), where
\([t_1,t_2]\)(\(t_2>t_1>T_{1}\)) represents a time segment after the transient process and \(mean_{t\in [t_1,t_2]}\) stands for calculating the mean value on the time segment \([t_1,t_2]\). \(\square \)
Proof
According to the localized approximation property of RBF NNs and noting that \(\tilde{W}_{k_{\varsigma }}=\hat{W}_{k_{\varsigma }}-W_{\varsigma }\), (15) and (17) can be expressed as
and
where \((\cdot )_{\varsigma }\) and \((\cdot )_{\bar{\varsigma }}\) represent the region close to and away from the union orbit \(Z=\cup _{k=1}^{N}Z_{k,n}\), respectively. \(\eta _{k}=-e_{k,n-1}-\epsilon _{k}\psi _{k}^{(n+1)}\). \(S_{\varsigma }^{T}(Z_{k,n}), \tilde{W}_{k_{\varsigma }}\) and \(\tilde{W}_{j_{\varsigma }}\) are the subvectors of \(S^{T}(Z_{k,n}), \tilde{W}_{k}\) and \(\tilde{W}_{j}\), respectively, and \(\varepsilon _{k_{\varsigma }}=\varepsilon _{k}-S_{\bar{\varsigma }}^{T}(Z_{k,n})\tilde{W}_{k_{\bar{\varsigma }}}\) is the new approximation error along the orbit Z. Because \(S_{\bar{\varsigma }}(Z_{k,n})\) is away from Z, then \(S_{\bar{\varsigma }}(Z_{k,n})\) is very small. Choosing small \(\sigma _{k}\) and noting that \(\hat{W}_{k_{\bar{\varsigma }}}(0)=\hat{W}_{j_{\bar{\varsigma }}}(0)=0\), it is clear that \(\hat{W}_{k_{\bar{\varsigma }}}\) is slightly updated. Based on the above analysis, \(S_{\bar{\varsigma }}^{T}(Z_{k,n})\tilde{W}_{k_{\bar{\varsigma }}}\) is very small such that \(\varepsilon _{k_{\varsigma }}=O(\varepsilon _{k})\).
It is worth noting that \(\varepsilon _{k_{\varsigma }}G(\bar{x}_{k,n})\) will be a perturbation term if we use (24) and (25) to construct a closed-loop error system. However, \(\varepsilon _{k_{\varsigma }}G(\bar{x}_{k,n})\) may be not a small value owing to \(\textit{G}_{n}(\bar{x}_{k,n})\ge \underline{g}\). To avoid this problem, similar to [31, 34], a linear transformation \(\xi _{k,n}=e_{k,n}/\overline{g}\) is employed. It can be deduced from (24) and (25) that
where \(\eta '_{k}=({G(\bar{x}_{k,n})}/{\overline{g}})\varepsilon _{k_{\varsigma }}+\eta _{k}/\overline{g}\). Due to \({G(\bar{x}_{k,n})}/{\overline{g}}\le 1\), thus it is clear that \(\eta '_{k}\) is a small value. Combining (27) and (28), the overall closed-loop system of the multi-agent system can be expressed by
where
Note that \(\varGamma (t)\) is a symmetric positive definite matrix. Let \(P(t)=\varGamma (t)\), and then
where \(\rho \) and \(\overline{g}^{2}\) are positive. Since \(g_{i}(\cdot )\ge g_{0},i=1,\ldots , n\), are smooth nonlinear functions, we can easily obtain that \(G(\bar{x}_{k,n})\ge 0\) and \(\dot{G}(\bar{x}_{k,n})\) are the continuous function. Furthermore, according to the boundness of \(\bar{x}_{k,n}\), \(\dot{G}(\bar{x}_{k,n})\) is also bounded, but its direction is also unknown. Consequently, we can properly choose large \(c_{k,n}\) such that \(2\rho \overline{g}^{2}c_{k,n}+\rho \overline{g}^{2}\dot{G}(\bar{x}_{k,n})/G^{2}(\bar{x}_{k,n})>0, k=1,\ldots ,N\), as well as there exist a symmetric positive definite matrix Q(t) such that \(\dot{P}(t)+P(t)A(t)+A^{T}(t)P(t)=-Q(t)\), where \(Q(t)=\mathrm{diag}\{2\rho \overline{g}^{2}c_{1,n}+\rho \overline{g}^{2}\dot{G}(\bar{x}_{1,n})/G^{2}(\bar{x}_{1,n}) \ldots , 2\rho \overline{g}^{2}c_{N,n}+\rho \overline{g}^{2}\dot{G}(\bar{x}_{N,n})/G^{2}(\bar{x}_{N,n})\}\).
On the other hand, Theorem 1 shows that \(e_{k,j}, j=1,\ldots ,n,k=1\ldots ,N,\) converge to a small neighborhood around zero after the finite time T. Thus, \(\hat{z}_{k}\) converges closely to \(\bar{y}_{k,n}\) after the time T. It follows from Lemma 2 that \(z_{k}=[z_{k,1},\ldots , z_{k,n}]^{T}\) is the recurrent signal. Moreover, \(f_{i}(\cdot )\) and \(g_{i}(\cdot )\) are smooth functions. We can conclude that \(\bar{x}_{k,n}\) is recurrent. Using (9)–(12) and (17) and with simple mathematical operation, we have
where \(L_{k1}(\cdot )\) and \(L_{k2}(\cdot )\) are linear combinations. Because \(L_{k1}(e_{k,1},\ldots ,e_{k,n})\) and \(L_{k2}(\epsilon _{k}\psi _{k}^{(2)},\ldots ,\epsilon _{k}\psi _{k}^{(n)})\) are very small. Therefore, \(\dot{\alpha }_{k,n-1}\) is the recurrent signal. Further, the NN input \(Z_{k,n}\) is also recurrent. By Lemma 1, \(S_{\varsigma }(Z_{k,n}),k=1,\ldots ,N\) are cooperative PE, then \({G(\bar{x}_{k,n})S_{\varsigma }(Z_{k,n})}/{\overline{g}},k=1,\ldots ,N,\) satisfy the cooperative PE condition.
According to the Theorem 1 of [37], the solution of (29) converges to a small neighborhood of zero. As a result, the weight estimation \(\hat{W}_{k_{\varsigma }}\) converges to a small neighborhood of \(W_{k_{\varsigma }}\), that is, \(\hat{W}_{1_{\varsigma }}\cong \cdots \cong \hat{W}_{N_{\varsigma }}\), as well as \(\overline{W}_{1}\cong \cdots \cong \overline{W}_{N}\). This means that the lumped uncertainty \(H(\cdot )\) can be approximated by RBF NNs along the union orbit Z, that is,
where \(\varepsilon _{k_{2}}=\varepsilon _{k_{\varsigma _{1}}}-S_{\bar{\varsigma }}(Z)^{T} \overline{W}_{k_{\bar{\varsigma }}}\) and \(\varepsilon _{k_{\varsigma 1}}\) are approximation errors. They are very small. Thus, the approximation of \(H(\cdot )\) along the union orbit \(Z=\cup _{k=1}^{N}Z_{k,n}\) is obtained. The proof is completed. \(\square \)
Remark 4
It should be pointed out that the NN weignt update law \(\dot{\hat{W}}_{k}\) in this paper is different from that in [25, 34]. Due to the existence of the cooperative learning term \(-\gamma \sum _{j\in \mathcal {N}_{k}} a_{kj}\Big (\hat{W}_{k}-\hat{W}_{j}\Big )\), any agent in the multi-agent system can learn the knowledge from its neighbor in a distributed manner. The benefits add this term is that the approximation domain of RBF NNs obtained in this paper is the union orbit of all agent, which is larger than that in [25] and [34]. But it is necessary to transmit weight information between agents.
Remark 5
The proposed solution in this paper can be used in many practical strict-feedback systems, such as robot manipulators [19] and unmanned surface vehicles [21, 44], because these systems satisfy Assumption 1. In contrast to the existing works, the main factor affecting practical applicability of the proposed solution is that we add the cooperative learning term \(-\gamma \sum _{j\in \mathcal {N}_{k}} a_{kj}\Big (\hat{W}_{k}-\hat{W}_{j}\Big )\) in the NN weight update law (15). It requires the communication between the neighbouring agents and a lot of weight information is transmitted over the communication network. Thus, high-performance communication networks, such as Ethernet, should be used in practice.

Numerical example: communication topology \({\mathcal {G}}\)

Numerical example: control performance

Numerical example: function approximation

Numerical example: function approximation with exchanging inputs

Numerical example: the convergence of NN weight


4 Control with experience
In Sect. 3, the NN approximation of the lumped uncertainty is obtained along the union orbit. In this section, we will use the obtained NNs to design the controller to control the same plant. Compared with adaptive neural control, the neural weight \(\overline{W}_{k}\) obtained in Theorem 2 can be directly used to design controllers, which does not adapt online. Therefore, the control performance, such as the convergence rate and transient performance, will be improved effectively. To show this, let us consider the same plant as (4)
where \(\bar{x}_{i}= [x_{1}, \ldots , x_{i}]^{T}\), \(\bar{x}_{n}=[x_{1}, \ldots , x_{n}]^{T}\in R^{n}\) is the state vector, and y is the output. First of all, we transform (32) into the normal form of (6)
where \(z=[z_{1},\ldots ,z_{n}]^{T}\) is the state vector. The HGO (7) is still used to estimate the unknown state z of (33). Denote the estimation of z as \(\hat{z}=[z_{1},\hat{z}_{2},\ldots ,\hat{z}_{n}]^{T}\).
For the \(k\hbox {th}\) reference model of (5), similar to (8)–(13), we directly give the controller of (32)
where \(\overline{W}_{k}\) is the previously learned NN weight.
Theorem 3
Consider the closed-loop system consisting of the plant (32), the HGO (7), the \(k\hbox {th}\) renference model of (5), and the controller (34). For the initial condition \(\bar{y}_{k,n}(0)\) generates the same periodic reference trajectory \(\varphi _{dk}\) as in Theorem 2, and with the initial condition \(\bar{x}_{n}(0)\) of (32) in a small neighborhood of \(\varUpsilon _{x}(0)\), where \(\varUpsilon _{x}(0)\) represents the value of \(x_{n}(t)\) when \(\bar{y}_{k,n}(t)=\bar{y}_{k,n}(0)\), then the following statements are true,
-
(i)
All the signals in the closed-loop system are still bounded;
-
(ii)
The system output \(y=x_{1}\) exponentially converges to a small neighborhood of \(y_{k,1}\). \(\square \)
Proof
The proof is similar to the proof of Theorem 2 of [40]. Thus, it is omitted here. \(\square \)

Inverted pendulum systems: communication topology \({\mathcal {G}}\)
5 Simulation
In this section, two examples are provided to validate the effectiveness of the proposed mechanism.
5.1 Numerical example
Consider a multi-agent system consisting of the following three strict-feedback systems [29]
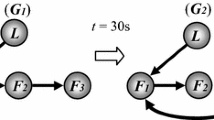
where \(x_{k,1}\) and \(x_{k,2}\) are the system states, and \(y_{k}\) is the output. The communication topology of the multi-agent system is shown in Fig. 1. We assume that \(f_{1}(\bar{x}_{k,1})=0.1x_{k,1}^{2}\), \(f_{2}(\bar{x}_{k,2})=0.2e^{-x_{k,2}^{2}}+x_{k,1}\sin (x_{k,2})\) and \(g_{1}(\bar{x}_{k,1})=1+0.1\sin (x_{k,1})\) are totally unknown, but they satisfy Assumption 1. The initial state values of (35) are \(\bar{x}_{1,2}=[0.2,0.4]^{T}\), \(\bar{x}_{2,2}=[0.3,0.4]^{T}\) and \(\bar{x}_{3,2}=[0.1,0.3]^{T}\).
Denote \(z_{k,1}=x_{k,1}\) and \(z_{k,2}=\dot{z}_{k,1}\). Then we transform (35) into the normal form
where \(\textit{F}_{2}(\bar{x}_{k,2})=[0.2x_{k,1}+0.1x_{k,2}\cos (x_{k,1})][0.1x_{k,1}^{2}+(1+0.1\sin (x_{k,1}))x_{k,2}]+ (1+0.1\sin (x_{k,1}))[0.2e^{-x_{k,2}^{2}}+x_{k,1}\sin (x_{k,2})]\) and \(\textit{G}_{2}(\bar{x}_{k,2})=1+0.1\sin (x_{k,1})\). Next, the following three HGOs are designed to estimate the states of (36)

Inverted pendulum systems: control performance

Inverted pendulum systems: function approximation with exchanging inputs
where \(p_{1,1}=p_{2,1}=p_{3,1}=1\) and \(\epsilon _{1}=\epsilon _{2}=\epsilon _{3}=0.0008\).
In this example, Duffing oscillators [30] are used as the reference models
where the parameters \([\lambda _{1,1},\lambda _{2,1},\lambda _{3,1}]=[-1.1,-0.8,-0.6]\), \(\lambda _{1,3}=\lambda _{2,3}=\lambda _{3,3}=0.55\), \(\lambda _{1,2}=\lambda _{2,2}=\lambda _{3,2}=1\), \([q_{1},q_{2},q_{3}]=[1.4,1.2,1]\), and \(w_{1}=w_{2}=w_{3}=1\). The initial conditions are set to be \(\bar{y}_{1,2}=[1.5,0.4]^{T}\), \(\bar{y}_{2,2}=[1.2,0.8]^{T}\) and \(\bar{y}_{3,2}=[1.6,0.5]^{T}\).

Inverted pendulum systems: the convergence of NN weight

From Sect. 3, we know that after the system transformation, an agent only use one RBF NN to approximate the lumped uncertainty H(Z) along the union orbit \(Z=\cup _{k=1}^{3}Z_{k,2}\). This means that only three RNF NNs are used in this simulation. Note that the parameters of the three RBF NNs are the same. Each RBF NN contains \(11\times 11\times 11\) centers and these centers are spaced in \([-2.5,2.5]\times [-2.5,2.5]\times [-5,5]\). The width of RBF NNs is \(\iota =0.8\). Other design parameters are set to be \(\rho =2\), \(\gamma =1\), \(\sigma _{1}=\sigma _{2}=\sigma _{3}=0.00001\), \(c_{1,1}=c_{2,1}=c_{3,1}=6\) and \(c_{1,2}=c_{2,2}=c_{3,2}=10\).
Figures 2, 3, 4 and 5 show the simulation results. In Fig. 2, we can see that the output of each agent can follow its reference signal effectively. Figures 3 and 4 show the approximation performance of RBF NNs, where \(\overline{W}_{k}=\mathrm{mean}_{t\in [330s,350s]}\hat{W}_{k},k=1,2,3\). To verify the approximation domain of each RBF NN is the union orbit \(Z=\cup _{k=1}^{3}Z_{k,2}\) rather than its own orbit \(Z_{k,2}\), we exchange the inputs of the RBF NNs and Fig. 4 shows the corresponding function approximation performance. From Fig. 4, it is clear that the approximation performance is still very good. Fig. 5 shows that the NN weights of all agents converge to a small neighborhood of their common optimal value, which also implies the approximation domain is the union orbit. For the purpose of comparison, let \(\gamma =0\), and then the weight update law is same as that in [25, 34]. Fig. 6 depicts the convergence of the NN weights, where only \(\gamma =0\) and other parameters are same as before. It is evident from Fig. 6 that convergence values of their weights are different. Further, we exchange the inputs of RBF NNs. The approximation performance is shown in Fig. 7. Obviously, the approximation performance is worse than that in Fig. 4. This implies that the approximation domain of each agent in its own orbit rather than the union orbit. Thus, the approximation domain of NNs that are obtained in this paper is larger than that in [25, 34].
After the above cooperative learning control process, we obtain the NNs, such as \(S(\cdot )\overline{W}_{1}\), \(S(\cdot )\overline{W}_{2}\) and \(S(\cdot )\overline{W}_{3}\). They can be used to design the controller to control the same plant, see (34). Compared with the adaptive neural control, the performance of neural control with the learned NNs is improved. The effectiveness can be found in [25, 30, 34, 36] and [37]. Thus, the simulation of neural control with past experience is omitted here.
5.2 Inverted pendulum example
Consider the following five inverted pendulum systems [29, 47],
where \(y_{k}\) and \(x_{k,2}\) are the angle and angular velocity of the \(k\hbox {th}\) pendulum, respectively, \(u_{k}\) is the input force. \(m_{c}\) is the mass of cart, m is the mass of a pole, l is the half length of a pole and \(g=9.8\,m/s^{2}\) is the gravity acceleration. The parameters are given by \(m_{c}=1\) Kg, \(m=0.1\) Kg and \(l=0.5\) m. Notice that \(f_{1}(\bar{x}_{k,1})=0\) and \(g_{1}(\bar{x}_{k,1})=1\). Thus, there is no need to use HGOs to estimate the unknown states.

The reference models are given as follows
where \([q^{\prime }_{1}, q^{\prime }_{2}, q^{\prime }_{3}, q^{\prime }_{4}, q^{\prime }_{5}]=[0.05, 0.08, 0.1, 0.13, 0.16]\). The initial states of (39) are set to be \(\bar{y}_{k,2}=[0,0]^{T}, k=1,2,3,4,5\).
In this example, five RBF NNs are used to approximate H(Z) along the union orbit \(Z=\cup _{k=1}^{5}Z_{k,2}\). Each RBF NN contains \(11\times 11\times 11\) centers and these centers are spaced in \([-0.1,0.1]\times [-0.2,0.2]\times [-0.3,0.3]\). The width of RBF NNs is \(\iota =0.05\). The design parameters are selected as \(\rho =2\), \(\gamma =1\), \(\sigma _{1}=\sigma _{2}=\sigma _{3}=0.00001\), \(c_{1,1}=c_{2,1}=c_{3,1}=4\) and \(c_{1,2}=c_{2,2}=c_{3,2}=10\). Figure 8 is the topology of the multiagent system.
Simulation results are shown in Figs. 9, 10 and 11. Fig. 9 shows that tracking performance. Figure 10 shows the function approximation with exchanging inputs. It indicates that approximation performance is still very good. Figure 11 shows that the NN weights of all agents converge to a small neighborhood of their common optimal value. Figures 12 and 13 are obtained by using the scheme in [25, 34]. They show that the function approximation with exchanging inputs is very bad because NN weights do not converge to a small neighborhood of their common optimal value.
6 Conclusion
This paper explores the DCL from adaptive NN control for a group of strict-feedback systems. First, we transform the strict-feedback systems into a normal form. With the help of this transformation, the number of RBF NNs is reduced in an agent, and it is easy to verify that the inputs of NNs are recurrent. Then we prove that all the signals in the multi-agent system are still bounded and the system output of each agent tracks its reference signal with a small error. Furthermore, the convergence of NN weights is achieved and the lumped uncertainty is approximated along the union orbit by RBF NNs. This implies that the RBF NNs have a large common approximation domain compared with the existing works. Finally, the learned NNs can be reused to design controller to improve the control performance.
It is found that NN weights are transmitted over the communication network. In other words, a large amount of data should be transmitted. This may cause the channel congestion. In the future work, we can study intermittent communication and quantification to overcome this problem.
References
Krstic M, Kanellakopoulos I, Kokotovic P (1995) Nonlinear and adaptive control design. Wiley, New York
Shao X, Si H, Zhang W (2021) Event-triggered neural intelligent control for uncertain nonlinear systems with specified-time guaranteed behaviors. Neural Comput Appl 33:5771–5791
Yan H, Li Y (2017) Adaptive NN prescribed performance control for nonlinear systems with output dead zone. Neural Comput Appl 28:145–153
Zhang T, Ge S, Hang C (2000) Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica 6(12):1835–1846
Ge S, Wang C (2002) Direct adaptive NN control of a class of nonlinear systems. IEEE Trans Neural Netw 13(1):214–221
Li J, Chen W, Li J (2011) Adaptive NN output-feedback decentralized stabilization for a class of large-scale stochastic nonlinear strict-feedback systems. Int J Robust Nonlinear Control 21:452–472
Tong S, Li Y (2012) Adaptive fuzzy output feedback tracking backstepping control of strict-feedback nonlinear systems with unknown dead zones. IEEE Trans Fuzzy Syst 20(1):168–180
Liu Y, Tong S (2017) Barrier Lyapunov functions for Nussbaum gain adaptive control of full state constrained nonlinear systems. Automatica 76:143–152
Liu J (2014) Observer-based backstepping dynamic surface control for stochastic nonlinear strict-feedback systems. Neural Comput Appl 24:1067–1077
Wang W, Li Y (2019) Observer-based event-triggered adaptive fuzzy control for leader-following consensus of nonlinear strict-feedback systems. IEEE Trans Cybern 51(4):2131–2141
Wang Z, Liu L, Wu Y, Zhang H (2018) Optimal fault-tolerant control for discrete-time nonlinear strict-feedback systems based on adaptive critic design. IEEE Trans Neural Netw Learn Syst 29(6):2179–2191
Zhang J, Yang G (2019) Low-complexity tracking control of strict-feedback systems with unknown control directions. IEEE Trans Autom Control 64(12):5175–5182
Song S, Zhang B, Song X, Zhang Z (2019) Neuro-fuzzy-based adaptive dynamic surface control for fractional-order nonlinear strict-feedback systems with input constraint. IEEE Trans Syst Man Cybern Syst 51(6):3575–3586
Li H, Zhao S, He W, Lu R (2019) Adaptive finite-time tracking control of full state constrained nonlinear systems with dead-zone. Automatica 100:99–107
Xu B, Shou Y, Luo J, Pu H, Shi Z (2019) Neural learning control of strict-feedback systems using disturbance observer. IEEE Trans Neural Netw Learn Syst 30(5):1296–1307
Cui G, Jiao T, Wei Y, Song G, Chu Y (2014) Adaptive neural control of stochastic nonlinear systems with multiple time-varying delays and input saturation. Neural Comput Appl 25:779–791
Liu L, Liu Y, Tong S (2019) Neural networks-based adaptive finite-time fault-tolerant control for a class of strict-feedback switched nonlinear systems. IEEE Trans Cybern 49(7):2536–2545
Wang D, Huang J (2005) Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans Neural Netw 16(1):195–202
Li T, Wang D, Feng G, Tong S (2010) A DSC approach to robust adaptive NN tracking control for strict-feedback nonlinear systems. IEEE Trans Syst Man Cybern Part B Cybern 40(3):915–927
Huang J (2015) Global adaptive neural dynamic surface control of strict-feedback systems. Neurocomputing 165:403–413
Peng Z, Wang D, Wang J (2017) Predictor-based neural dynamic surface control for uncertain nonlinear systems in strict-feedback form. IEEE Trans Neural Netw Learn Syst 28(9):2156–2167
Xu B, Sun F (2018) Composite intelligent learning control of strict-feedback systems with disturbance. IEEE Trans Cybern 48(2):730–741
Zhang T, Xia M, Yi Y (2017) Adaptive neural dynamic surface control of strict-feedback nonlinear systems with full state constraints and unmodeled dynamics. Automatica 81:232–239
Chen M, Tao G, Jiang B (2015) Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans Neural Netw Learn Syst 26(9):2086–2097
Wang M, Wang C (2015) Learning from adaptive neural dynamic surface control of strict-feedback systems. IEEE Trans Neural Netw Learn Syst 26(6):1247–1259
Swaroop D, Hedrick J, Yip P, Gerdes J (2000) Dynamic surface control for a class of nonlinear systems. IEEE Trans Autom Control 45(10):1893–1899
Yip P, Hedrick J (1998) Adaptive dynamic surface control: a simplified algorithm for adaptive backstepping control of nonlinear systems. Int J Control 71(5):959–979
Song B, Hedrick J (2004) Observer-based dynamic surface control for a class of nonlinear systems: an LMI approach. IEEE Trans Autom Control 49(11):1995–2001
Park J, Kim S, Moon C (2009) Adaptive neural control for strict-feedback nonlinear systems without backstepping. IEEE Trans Neural Netw 20(7):1204–1209
Wang C, Hill D (2006) Learning from neural control. IEEE Trans Neural Netw 17(1):130–146
Liu T, Wang C, Hill DJ (2009) Learning from neural control of nonlinear systems in normal form. Syst Control Lett 58(9):633–638
Dai S, Wang C, Wang M (2014) Dynamic learning from adaptive neural network control of a class of nonaffine nonlinear systems. IEEE Trans Neural Netw Learn Syst 25(1):111–123
Wang M, Wang C (2015) Neural learning control of pure-feedback nonlinear systems. Nonlinear Dyn 79:2589–2608
Wang M, Wang C, Shi P, Liu X (2016) Dynamic learning from neural control for strict-feedback systems with guaranteed predefined performance. IEEE Trans Neural Netw Learn Syst 27(12):2564–2576
Wang M, Yang A (2017) Dynamic learning from adaptive neural control of robot manipulators with prescribed performance. IEEE Trans Syst Man Cybern Syst 47(8):2244–2255
Dai S, He S, Wang M, Yuan C (2019) Adaptive neural control of underactuated surface vessels with prescribed performance guarantees. IEEE Trans Neural Netw Learn Syst 30(12):3686–3698
Chen W, Hua S, Zhang H (2015) Consensus-based distributed cooperative learning from closed-loop neural control systems. IEEE Trans Neural Netw Learn Syst 26(2):331–345
Ai W, Chen W, Hua S (2018) Distributed cooperative learning for a group of uncertain systems via output feedback and neural networks. J Frankl Inst 355(5):2536–2561
Yuan C, He H, Wang C (2019) Cooperative deterministic learning-based formation control for a group of nonlinear uncertain mechanical systems. IEEE Trans Ind Inform 15(1):319–333
Gao F, Chen W, Li Z, Li J, Xu B (2020) Neural network-based distributed cooperative learning control for multiagent systems via event-triggered communication. IEEE Trans Neural Netw Learn Syst 31(2):407–419
Laub A (2005) Matrix analysis for scientists and engineers. SIAM, Philadelphia
Park J, Sandberg I (1991) Universal approximation using radial-basis-function networks. Neural Comput 3(2):246–257
Sanner R, Slotine J (1992) Gaussian networks for direct adaptive control. IEEE Trans Neural Netw 3(6):837–863
Cui B, Xia Y, Liu K, Shen G (2020) Finite-time tracking control for a class of uncertain strict-feedback nonlinear systems with state constraints: a smooth control approach. IEEE Trans Neural Netw Learn Syst 31(11):4920–4932
Bthtash S (1990) Robust output tracking for non-linear systems. Int J Control 51(6):1381–1407
Ge SS, Hang CC, Lee T, Zhang T (2001) Stable adaptive neural network control. Kluwer, Norwell
Yang YS, Ren JS (2003) Adaptive fuzzy robust tracking controller design via small gain approach and its application. IEEE Trans Fuzzy Syst 11(6):783–795
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China under Grants 61966026, 61941304 and 61673014, 62163030, and in part by Natural Science Foundation of Inner Mongolia under Grants 2020BS06004 and 2019BS06006.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Gao, F., Bai, F., Weng, Z. et al. Cooperative learning from adaptive neural control for a group of strict-feedback systems. Neural Comput & Applic 34, 14435–14449 (2022). https://doi.org/10.1007/s00521-022-07239-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-022-07239-9