
Abstract
This paper focuses on the finite-time lag synchronization (FTLS) of uncertain complex networks involving impulsive disturbance effects. By designing two different controllers, some Lyapunov-based conditions are established in terms of linear matrix inequalities to ensure the FTLS of impulsive systems, where the upper bound of the synchronizing times can be estimated via constructing Lyapunov functions. It is interesting to discover that the synchronizing time depends not only on the initial value but also on the impulse sequences, which implies that different impulses will lead to different synchronization times. Finally, a numerical example is given to illustrate the feasibility and effectiveness of the proposed FTLS criterion.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Since Huygens discovered that the pendulum oscillates synchronously, the synchronization phenomenon has been widely concerned and continuously studied. In 1990, Pecora and Carroll [1] of the US Navy laboratory put forward the drive-response synchronization method, which further triggered the research upsurge of synchronization and control for dynamic systems in various fields, such as signal processing, engineering, combinatorial optimization, modeling brain activity, and secure communication [2,3,4,5]. Up to now, many studies on several types of synchronization including complete, generalized, anticipated, lag, and phase synchronization have been proposed [6,7,8,9,10]. Among them, lag synchronization is very common in the implementation of electronic networks, which requires the current state of one node to be synchronized with the past state of another node; that is to say, there is a time shift on synchronization between these two nodes [11, 12]. In the telephone communication network, for example, the voice received by the receiver at time \(t^*\) is sent by the sender at time \(t^*-\rho\), where \(\rho\) is the time shift. That is to say, the real-time transmission cannot be realized in many real models, i.e., complete synchronization cannot be effectively realized. In this case, it is natural to consider the lag synchronization. In addition, from the practical engineering application of parallel image processing and secure communication, this is a reasonable synchronization strategy. Therefore, the lag synchronization research has been applied to many practical systems, such as laser, neural networks, and electronic circuit [7, 13,14,15,16].
As we all know, synchronization performance is a key performance index in the synchronization of dynamical systems. However, in most closed-loop system control design methods, the fastest synchronization rate is in exponential form, which is why better synchronization performance cannot be achieved. The fundamental reason is that Lipschitz continuity of the closed-loop system needs to be satisfied. Therefore, these control analysis methods belong to the synchronization control problem over the infinite time. In addition, since the life span of human and machine is limited, people want to realize synchronization in finite time as much as possible. Especially in the field of engineering technology and economic management, if the goal of synchronization can be achieved within a certain period of time, it will greatly improve economic benefits. Based on above motivations, a synchronization called finite-time synchronization has attracted attention. It requires synchronization within a finite time. The improvement in this performance not only ensures the fastest convergence time of network synchronization, but also has better robustness against disturbance and uncertainty [17, 18], in which robustness refers to the ability to keep synchronization performance unchanged under uncertain interference. Therefore, network synchronization based on finite-time stability theory has been studied in the field of physics and engineering, and there have been a lot of researches on finite-time stability and chaos synchronization [18,19,20,21,22,23,24,25,26,27]. For example, by periodic intermittent control and impulsive control, Mei et al. [18] studied the finite-time synchronization (FTS) of complex networks (CNs) with delayed and non-delayed coupling; in [25], authors studied the FTS of hierarchical delayed neural networks by using Lyapunov–Krasovskii functional methods; Jing et al. [26] adjusted and designed a periodically intermittent strengths and feedback controller, respectively, to realize finite-time lag synchronization (FTLS) of delayed CNs. Therefore, it is necessary to study FTS for different types of network systems via different methods.
On the other hand, the key to realize FTS for CNs is to design a suitable controller. In recent years, there are various kinds of controllers to realize FTS for many kinds of systems, such as observer-based controller, sliding mode controller, adaptive controller, impulsive controller, and feedback controller [18, 28,29,30,31,32,33,34]. When designing the controller, we should not only consider whether the controller can achieve FTS successfully, but also consider the excellent performance of the designed controller. Hence, the design of controller should be simple in structure and easy to implement, and moreover, it should be continuous to avoid the chattering phenomenon. However, when designing FTS controllers, these two points are rarely fully considered in many cases. For example, the boundedness of controllers designed in [18] is hard to guarantee due to the special structure of the controllers; the proposed controllers in [33] are not precise and need to be further improved.
Based on above discussions, it is very necessary to design a proper controller to study the problem of lag synchronization in finite time. Moreover, in practical application, when the control input is transmitted, it is often affected by frequency change, switching phenomenon, or other burst noise in impulse form. Therefore, considering the impulse noise interference in the real control is a very normal thing in many cases. This paper considers the FTLS of uncertain drive-response systems involving impulsive disturbances. There are several main contributions as follows.
-
(1)
Unlike previous papers [24,25,26, 35,36,37], impulse noise interferences for FTLS of CNs are fully considered. When system is involved in impulse disturbances before reaching the synchronization time, the obtained results show that the synchronizing time is related to the impulses and will be delayed. Furthermore, for impulse, we do not impose restriction on lower bound of two consecutive impulse disturbances and the size of impulse intervals does not affect FTLS for addressed system.
-
(2)
Different from the designed controllers in [24, 33, 36], the boundedness problem of the controllers is overcome, and it is easier to implement through LMI toolbox.
The rest of the paper is organized as follows. Section 2 presents some preliminaries. By designing two different control laws, in Sect. 3, we establish some FTLS criterion for uncertain drive-response systems. A numerical example is given in Sect. 4. Section 5 shows the conclusion of this paper.
2 Preliminaries
Notations Let \({\mathbb {Z}}_+\) denote the set of positive integer numbers, \({\mathbb {R}}\) the set of real numbers and \({\mathbb {R}}^n\) the n-dimensional real spaces equipped with the Euclidean norm \(|\cdot |\). \(B> 0\) (\(B<0\)) denotes that B is symmetric and positive (negative) definite matrix. \(\varTheta =\{1,2,\ldots ,N\}\) and I is an identity matrix. For \(H\subseteq {\mathbb {R}},\) set \(W\subseteq {\mathbb {R}}^m (1\le m\le n), C(H, W)=\{\omega :H\rightarrow W\) is a continuous function} and \(PC(H, W)=\{\omega :H\rightarrow W\) is a continuous function everywhere except at finite number of instances t, at which \(\omega (t^+),\) \(\omega (t^-)\) exist, and moreover, \(\omega (t^+)=\omega (t)\}.\) \({\mathcal {K}}=\{b(\cdot )\in C({\mathbb {R}}_+, {\mathbb {R}}_+) |\ b(0)=0\) , \(b(\delta )>0\) for \(\delta >0\), and b is strictly increasing in \(\delta\)}.
Consider the CNs composed of N coupled nodes and each of the nodes is an n-dimensional network. The dynamic of the ith networks is described by
where \(x_i(t)=(x_{i1}(t), x_{i2}(t),\ldots , x_{in}(t))^{T}\in {\mathbb {R}}^n\) is the ith network state; \(\bar{A}=A+\triangle A\), \(\bar{B}=B+\triangle B,\) in which \(A,\ B\in {\mathbb {R}}^{n\times n}\) are the connection weight matrices, and \(\triangle A,\ \triangle B\in {\mathbb {R}}^{n\times n}\) are parametric uncertainties; \(c>0\) is the coupling strength; \(f(x_i(t))=(f_1(x_{i1}(t)),\ f_2(x_{i2}(t)),\ldots ,f_n(x_{in}(t)))^{T}\) denotes nonlinear function and satisfies \(|f_{j}(\vartheta _1)-f_{j}(\vartheta _2)| \le l_j |\vartheta _1-\vartheta _2|\) for any \(\vartheta _1,\ \vartheta _2\in {\mathbb {R}},\) where \(l_j>0\) are constants for \(j=\{1,2,\ldots ,n\}\); the coupling configuration \(H=(h_{ij})_{N\times N}\) is defined as: for element \(h_{ij}\), if there is a connection from node j to node i, then \(h_{ij}>0\), or else \(h_{ij}=0\), and the diagonal elements \(h_{ii}=-\sum _{i=1, j\ne i}^N h_{ij}.\) The inner coupling matrix \(\varGamma ={\mathrm{diag}}\{\gamma _1,\ \gamma _2,\ \ldots ,\gamma _n\}>0\) and \(x_i(0)=x_{i0}\) denotes initial value of the network (1).
In order to study the lag synchronization, we refer to system (1) as the drive system without losing generality. In addition, it is assumed that during the transmission of the input signal, the state may suddenly jump at some discrete time, that is, the impulse phenomenon is generated [4, 38]. Hence, this paper considers the following CNs involving impulse as response system:
with the initial value \(y_i(\sigma )=y_{i\sigma }, \ i\in \varTheta ,\) where \(y_i(t)=(y_{i1}(t), y_{i2}(t),\ldots , y_{in}(t))^{T}\in {\mathbb {R}}^n\) and \(\sigma\) is a positive constant; the control input \(u_i(t)\) will be designed later; \(\Delta y_i(t_k)=y_i(t_k)-y_i(t_k^-);\) D represents the impulse matrix. The time sequence \(\{t_k, k\in {\mathbb {Z}}_+\}\) is the set of impulse sequences which is strictly increasing on \({\mathbb {R}}_+\). We denote such sequence by set \({\mathcal {F}}\) for later use. The rest parameters in system (2) are the same as in system (1).
Define the lag synchronization error \(\zeta _i(t)=y_i(t)-x_i(t-\sigma )\). Then, we can obtain the following error system between drive-response system (1) and (2)
where \(g(\zeta _i(t))=f(y_i(t))-f(x_i(t-\sigma ))\) and \(\Delta \zeta _i(t_k)=\zeta _i(t_k)-\zeta _i(t_k^-)\) for \(i\in \varTheta\). For convenience, let \(\zeta (t)=(\zeta _1^{T}(t), \zeta _2^{T}(t),\ldots , \zeta _N^{T}(t))^{T}\) and \(G(\zeta (t))=(g^{T}(\zeta _1), g^{T}(\zeta _2),\ldots , g^{ T}(\zeta _N))^{T}\). Then, the Kronecker product form of the error system (3) can be transformed into
where \(U=(u^{T}_1, u^{T}_2, \ldots , u^{T}_N)^{T},\) and the initial value \(\zeta (\sigma )=\zeta _\sigma =(\zeta ^{T}_{1\sigma }, \zeta ^{T}_{2\sigma },\ldots ,\zeta ^{T}_{N \sigma } )^{T},\) \(\zeta _{i\sigma }=y_{i\sigma }-x_{i0},\ i\in \varTheta .\)
Definition 1
[35] For given impulse sequence \(\{t_k\}\in {\mathcal {F}}\) and constant \(\sigma >0\), the system (1) and (2) is said to be FTLS if there exists a constant \(T>0\) such that
and
where T called synchronizing time depends on the initial value \(\zeta _{i\sigma }\) and impulse sequences \({\mathcal {F}}\).
Remark 1
From the description of lag synchronization error system, the response system does not receive the information from the driver system from time 0 to \(\sigma\). Thus, in Definition 1, we describe this characteristic for FTLS, that is, synchronization time of the drive-response systems is delayed due to the constant \(\sigma\) which is named transmission delay. Due to the existence of transmission delay \(\sigma\), the real synchronization time of the drive-response systems is \(T+\sigma\), where T represents the synchronizing time starting from the time \(\sigma\) and depends not only on the initial value \(\zeta _{i\sigma }\) but also on the impulse sequence \({\mathcal {F}}\). In particular, assume that a special case of \(\sigma =0\) is considered, and then, we can realize the complete synchronization of the systems (1) and (2) with synchronizing time T. Hence, there is a wide applicability in our results.
Definition 2
[32] For any vector \(\nu =(\nu _1, \nu _2,\ldots ,\nu _n)^{T}\in {\mathbb {R}}^n\) and constant \(\mu\), we define
Assumption 1
There exist constants \(\varepsilon _1,\ \varepsilon _2>0\) such that uncertainties \(\triangle A,\ \triangle B\in {\mathbb {R}}^{n\times n}\) satisfy the following conditions:
Before giving the main results, we first introduce the theoretical results of impulsive systems, which plays an important role in our proof.
Consider the following nonlinear impulsive system:
Li et al. [22] provide the detailed descriptions for functions f, g and impulse sequence \({\mathcal {S}}\), which are omitted here. For system (5), the following lemma can be obtained.
Lemma 1
[22] Let \(U_\rho =\{x\in {\mathbb {R}}^{n}: |x|\le \rho \}\) with \(\rho >0.\) System (5) is FTS over the class \({\mathcal {S}}\) of impulse sequences if there exist constants \(\beta \in [1, \infty ),\ \eta \in (0, 1),\ \alpha >0,\) functions \(w_1, w_2\in {\mathcal {K}}\), and locally Lipschitz continuous function \(V(x): {\mathbb {R}}^{n}\rightarrow {\mathbb {R}}_+\) such that
-
(i)
\(\ w_1(|x|)\le V(x)\le w_2(|x|),\ \forall x\in {\mathbb {R}}^n,\)
-
(ii)
\(\ V(g(x))\le \beta ^{\frac{1}{1-\eta }}V(x),\ \forall x\in {\mathbb {R}}^n, t=t_k,\)
-
(iii)
\(\ D^+V\le -\alpha V^\eta (x),\ \forall x\in {\mathbb {R}}^n,\ t\ne t_k,\) and the impulse sequences \(\{t_k\}\in {\mathcal {S}}\) satisfy
In addition, the settling time is bounded by
where \(N_0\) depends on \(\{t_k\}\).
3 Main results
In this section, we focus on the design of controllers to ensure the FTLS of systems (1) and (2), where desynchronizing impulses are considered.
Theorem 1
Under Assumption 1, if there exist constants \(\alpha>0,\ \rho >0,\ \beta \in [1, \infty ), \ \mu \in (-1, 1),\) \(n\times n\) matrices \(P>0,\ Q>0,\) \(n\times n\) diagonal matrices \(S>0,\ R>0,\) and \(n\times n\) real matrix W such that
where \(\varPi =I_N\otimes (A^{T}P+PA+LRL)+2cH\otimes (P\varGamma )-I_N\otimes W-I_N\otimes W^{T}\), \(L={\mathrm{diag}}(l_1, l_2,\ldots ,l_n).\) Then, the drive-response system (1) and (2) is FTLS over the class \({\mathcal {F}}\) under the controller given by
where impulse sequences \(\{t_k\}\in {\mathcal {F}}\) satisfy
In addition, the synchronizing time is bounded by
\(\forall \zeta _\sigma \in U_\rho ,\ \forall \{t_k\}\in {\mathcal {F}},\) where \(N_0\) depends on \(\{t_k\}\).
Proof
Choosing Lyapunov function as
Taking the derivative of V(t) over the time interval \(t\in [t_{k-1}, t_k),\ t\ge \sigma\) along the solution of (4), we have
From Assumption 1, it is easy to derive
and
Substituting (13)–(14) into (12) and considering condition (6), it holds that
In addition, when \(t=t_k,\ k\in {\mathbb {Z}}_+,\) one obtains that
Then, we see that it is easy for inequalities (15) and (16) to satisfy Lemma 1. Thus, the FTLS of systems (1) and (2) under the controller (8) over the class \({\mathcal {F}}\) of impulse sequences given in (9) is achieved. Moreover, the synchronizing time (10) is derived. This completes the proof. □
Remark 2
In Theorem 1, some sufficient conditions for synchronization control of systems (1) and (2) are presented. Note that it is necessary to ensure LMIs (6)–(7) hold simultaneously, that is to say, some decision matrices P, Q, W, S, R are solved to ensure LMIs (6)–(7) feasible for some given parameters at the same time. Moreover, in implementation, it can be seen from the derivation of inequality (16) that for given \(\mu\), it is desirable to find smallest constants \(\beta\) to ensure the term \((I+D)^TP(I+D)\) is as close as possible to \(\beta ^{\frac{2}{1-\mu }}P\). Therefore, when solving (6)–(7), the MATLAB LMI toolbox is used to find the smallest \(\beta\) so that the above inequalities hold.
In what follows, another FTLS result for the drive-response system (1) and (2) is derived based on a new Lyapunov function, in which a special case that the impulse matrix \(D={\mathrm{diag}}\{d_1, d_2,\ldots , d_n\}>0\) is considered.
Theorem 2
Under Assumption 1, if there exist constants \(\alpha>0,\ \rho >0,\ \beta \in [1, \infty ), \ \mu \in (-1, 1),\) \(k_1,\ k_2,\ k_3>0\), \(n\times n\) diagonal matrix \(P>0,\) \(n\times n\) real matrix W such that
\((H_1)\) \(I_N\otimes \big (A^TP+PA+\frac{\varepsilon _1}{k_1}I+\frac{1}{k_2}L+\frac{\varepsilon _2}{k_3}L\big )+2cH\otimes (P\varGamma ) -I_N\otimes W-I_N\otimes W^T\le 0,\)
\((H_2)\) \(\displaystyle \lambda _{\max }(I+D)\le \beta ^{\frac{2}{1-\mu }}I,\)
where \(L={\mathrm{diag}}(l_1, l_2,\ldots ,l_n).\) Then, the drive-response system (1) and (2) is FTLS over the class \({\mathcal {F}}\) under the controller given by
with
where impulse sequences \(\{t_k\}\in {\mathcal {F}}\) satisfy
In addition, the synchronizing time is bounded by
\(\forall \zeta _\sigma \in U_\rho ,\ \forall \{t_k\}\in {\mathcal {F}},\) where \(N_0\) depends on \(\{t_k\}\).
Proof
Consider the Lyapunov function
Taking the derivative of V(t) over the time interval \(t\in [t_{k-1}, t_k),\ t\ge \sigma\) along the solution of (4), one has that
Note that
From Assumption 1, one obtains that when \(|\zeta (t)|\ne 0,\)
and
When \(|\zeta (t)|=0,\), it can be derived that
Thus, assertion Eqs. (22) and (23) hold for any \(\zeta (t)\in {\mathbb {R}}^{Nn}.\) Moreover, from the definition of \(S(\nu )\) , we have
Combining this with (21)–(23) over the time interval \(t\in [t_{k-1}, t_k),\ t\ge \sigma ,\), one has that
In addition, when \(t=t_k,\ k\in {\mathbb {Z}}_+,\)
According to Lemma 1, the FTLS problem of systems (1) and (2) under the controller (17) over the class \({\mathcal {F}}\) of impulse sequences given in (18) is achieved, and moreover, the synchronizing time (19) is derived. The proof is completed. □
Remark 3
In recent years, there are many results dealt with the problem for FTLS of CNs [24, 35,36,37]. However, note that the controllers in [24, 36] needed state feedback with special structure when the lag synchronization error is not zero, i.e., \(\zeta _i/|\zeta _i|^2\) when \(\zeta _i \ne 0\), which is named fractional state feedback. The obvious disadvantage of this kind of controllers is that although \(u_i\) is defined when \(\zeta _i=0\), when \(\zeta _i\) is close to 0, it is difficult to determine whether \(u_i\) is bounded or not, which indicates that these controllers are difficult to apply in finite-time sense when considering the synchronization problem. In our results, the controllers (8) and (17) can effectively solve the problem of boundedness in [24, 36] and are easier to implement in applications. In addition, it should be noted that these researches are all based on continuous state dynamics. When considering a system with impulses, there are many difficulties and challenges, such as when the FTLS system is affected by impulse disturbance, the FTLS property may changed and the synchronizing time may increase or even tend to infinity. Hence, some FTLS conditions of drive-response systems with impulse effects are presented in our results, which generalizes the previous results.
Remark 4
In Theorems 1 and 2, by constructing different Lyapunov functions, the FTLS criteria of CNs involving impulsive disturbance are obtained, respectively. The proposed results show that different impulses will lead to different synchronization times. If the system is subjected to impulse disturbance with large disturbance strength or more frequent impulse sequence, the convergence rate will slow down, and then, the synchronization time will be delayed. Conversely, when smaller disturbance strength or less frequent impulse sequence is involved to the system, the convergence speed will speeded up and then the synchronization time will be shortened. This observation can be found from (10) and (19).
4 Numerical examples
In this section, a example is given to illustrate the FTLS of the drive-response system with impulse disturbance under the control design.
Example 1
CNs often arise in the modeling of practical systems, such as digital communication network, urban public transportation, epidemic spreading phenomena. In view of this, we consider the following 3D uncertain CNs as drive system
with
\(c=0.2\) and \(f(\nu )=(f_1(\nu ), f_2(\nu ), f_3(\nu ))^T,\) where \(f_j(\nu )=0.5(|\nu +1|-|\nu -1|),\ j=1, 2, 3.\)
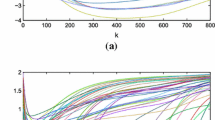
Consider the initial condition \(x_{10}=(1, 2, -1)^T,\ x_{20}=(3, -1, 2)^T,\ x_{30}=(5, -3, -1)^T,\ x_{40}=(-1, 2, 1)^T.\) Then, state trajectories of drive system (26) are shown in Fig. 1.

Trajectories of drive system (26)
Considering the response system involving impulses disturbance in the form of
where impulses matrix
and impulse sequences \(t_{4k}=3k,\ t_{4k-1}=3k-1,\ t_{4k-2}=3k-1.98,\ t_{4k-3}=3k-1.99.\)
In simulation, the lag synchronization with \(\sigma =1\) is considered. In what follows, we choose \(\alpha =2,\ \beta =1.3,\ \mu =0.2,\ k_1=k_2=k_3=1\) and note that \(L=I,\ \varepsilon _1=0.1,\ \varepsilon _2=0.1.\) According to Theorem 2, the following feasible solution is derived by MATLAB LMI toolbox

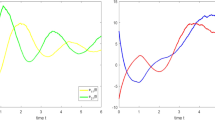
Trajectories of error \(\zeta _i=y_i(t)-x_i(t-\sigma )\) with \(\sigma =1\) under controller (17)
Then drive-response system (26) and (27) can achieve FTLS under the controller (17), where synchronizing time is bounded by \(T(\zeta _\sigma , \{t_k\})\le 1.8797\). Under same conditions, when considering system without impulses, we can estimated the synchronizing time \(T(\zeta _\sigma , \{t_k\})\le 0.8556\). It shows that due to the existence of impulse disturbances in response system, the synchronization time is delayed. The lag synchronization errors of CNs with impulse disturbance and the synchronizing time with \(\sigma =1\) are shown in Fig. 2. Correspondingly, the state trajectories without/with controller are shown in Fig. 3, where the initial condition is chosen as \(y_{1\sigma }=[1,3,-2]^T,\ y_{2\sigma }=[2,1,1]^T,\ y_{3\sigma }=[3,-1,1]^T,\ y_{4\sigma }=[-3,1,1]^T.\)

5 Conclusion
This paper studied the FTLS of uncertain CNs subjecting to impulsive disturbances, and some criteria on synchronization control were established by employing different Lyapunov function in two theorems. In particular, the synchronizing time for addressed impulsive system was estimated, which shows that different impulses will lead to different synchronization times. Finally, the effectiveness of the proposed results was verified by a numerical example. The development for systems involving delayed impulses with synchronizing-time estimation is an interesting topic in the future, and moreover, further interesting research topic is the case that synchronization time is independent of the initial value, i.e., the problem of fixed-time synchronization. In addition, inspired by [39, 40], our another future work will concern with controller design for finite-time problems of practical system.
References
Pecora L, Carroll T (1999) Master stability functions for synchronized coupled systems. Int J Bifurc Chaos 9(12):2315–2320
Mirollo RE, Strogatz SH (1990) Synchronization of pulse-coupled biological oscillators. SIAM J Appl Math 50(6):1645–1662
Lu J, Ho DWC, Cao J (2010) A unified synchronization criterion for impulsive dynamical networks. Automatica 46:1215–1221
Yang X, Lu J (2016) Finite-time synchronization of coupled networks with Markovian topology and impulsive effects. IEEE Trans Autom Control 61(8):2256–2261
Cai C, Wang Z, Xu J, Liu X, Alsaadi FE (2015) An integrated approach to global synchronization and state estimation for nonlinear singularly perturbed complex networks. IEEE Trans Cybern 45(8):1597–1609
Boccaletti S, Kurths J, Osipov G, Valladares DL, Zhou CS (2002) The synchronization of chaotic systems. Phys Rep 366:1–101
Wang X, She K, Zhong S, Yang H (2019) Lag synchronization analysis of general complex networks with multiple time-varying delays via pinning control strategy. Neural Comput Appl 31:43–53
Fell J, Axmacher N (2011) The role of phase synchronization in memory processes. Nat Rev Neurosci 12(2):105–118
Masoller C, Zanette NH (2001) Anticipated synchronization in coupled chaotic maps with delays. Phys A Stat Mech Appl 300(3–4):359–366
Lv X, Li X, Cao J, Duan P (2018) Exponential synchronization of neural networks via feedback control in complex environment. Complexity 2018:1–13
Yang D, Li X, Qiu J (2019) Output tracking control of delayed switched systems via state-dependent switching and dynamic output feedback. Nonlinear Anal Hybrid Syst 32:294–305
Li X, Yang X, Huang T (2019) Persistence of delayed cooperative models: impulsive control method. Appl Math Comput 342:130–146
Li C, Liao X, Wong KW (2004) Chaotic lag synchronization of coupled time-delayed systems and its applications in secure communication. Physica D Nonlinear Phenomena 194(3–4):187–202
Zhou J, Chen T, Xiang L (2005) Chaotic lag synchronization of coupled delayed neural networks and its applications in secure communication. Circuits Syst Signal Process 24(5):599–613
Yu W, Cao J (2012) Adaptive synchronization and lag synchronization of uncertain dynamical system with time delay based on parameter identification. Phys A Stat Mech Appl 375(2):467–482
Fan Y, Huaqing L, Guo C, Dawen X, Qi H (2019) Cluster lag synchronization of delayed heterogeneous complex dynamical networks via intermittent pinning control. Neural Comput Appl 31:7945–7961
Du H, Li S, Qian C (2011) Finite-time attitude tracking control of spacecraft with application to attitude synchronization. IEEE Trans Autom Control 56(11):2711–2717
Mei J, Jiang M, Xu W, Wang B (2013) Finite-time synchronization control of complex dynamical networks with time delay. Commun Nonlinear Sci Numer Simul 18(9):2462–2478
Bhat SP, Bernstein DS (1997) Finite-time stability of homogeneous systems. In: American control conference
Hong Y, Wang J, Cheng D (2006) Adaptive finite-time control of nonlinear systems with parametric uncertainty. IEEE Trans Autom Control 51(5):858–862
Ren F, Jiang M, Xu H, Fang X (2020) New finite-time synchronization of memristive Cohen–Grossberg neural network with reaction–diffusion term based on time-varying delay. Neural Comput Appl. https://doi.org/10.1007/s00521-020-05259-x
Li X, Ho D, Cao J (2019) Finite-time stability and settling-time estimation of nonlinear impulsive systems. Automatica 99:361–368
Li S, Tian Y (2003) Finite time synchronization of chaotic systems. Chaos Solitons Fractals 15(2):303–310
Huang J, Li C, Huang T, He X (2014) Finite-time lag synchronization of delayed neural networks. Neurocomputing 139:145–149
Wang J, Zhang H, Wang Z, Gao DW (2017) Finite-time synchronization of coupled hierarchical hybrid neural networks with time-varying delays. IEEE Trans Cybern 47(10):2995–3004
Jing T, Chen F, Zhang X (2016) Finite-time lag synchronization of time-varying delayed complex networks via periodically intermittent control and sliding mode control. Neurocomputing 199(26):178–184
Wang H, Shi L, Man Z, Zheng J, Li S, Yu M, Jiang C, Kong H, Cao Z (2018) Continuous fast nonsingular terminal sliding mode control of automotive electronic throttle systems using finite-time exact observer. IEEE Trans Ind Electron 65(9):7160–7172
Aghababa MP (2012) Finite-time chaos control and synchronization of fractional-order nonautonomous chaotic (hyperchaotic) systems using fractional nonsingular terminal sliding mode technique. Nonlinear Dyn 69:247–261
Khanzadeh A, Pourgholi M (2016) Robust synchronization of fractional-order chaotic systems at a pre-specified time using sliding mode controller with time-varying switching surfaces. Chaos Solitons Fractals 91:69–77
Vincent UE, Guo R (2011) Finite-time synchronization for a class of chaotic and hyperchaotic systems via adaptive feedback controller. Phys Lett A 375(24):2322–2326
Li D, Cao J (2015) Global finite-time output feedback synchronization for a class of high-order nonlinear systems. Nonlinear Dyn 82:1027–1037
Zhang X, Li X, Cao J, Miaadi F (2018) Design of memory controllers for finite-time stabilization of delayed neural networks with uncertainty. J Frankl Inst 355:5394–5413
Wang L, Shen Y, Ding Z (2015) Finite time stabilization of delayed neural networks. Neural Netw Off J Int Neural Netw Soc 70:74–80
Yang X, Li X, Xi Q, Duan P (2018) Review of stability and stabilization for impulsive delayed systems. Math Biosci Eng 15(6):1495–1515
Wang X, Liu X, She K, Zhong S (2017) Finite-time lag synchronization of master-slave complex dynamical networks with unknown signal propagation delays. J Frankl Inst 354(12):4913–4929
Al-Mahbashi G, Noorani MSM (2019) Finite-time lag synchronization of uncertain complex dynamical networks with disturbances via sliding mode control. IEEE Access 7:7082–7092
Dong Y, Chen J, Xian J (2018) Event-triggered control for finite-time lag synchronisation of time-delayed complex networks. IET Control Theory Appl 12(14):1916–1923
Hu J, Sui G, Lv X, Li X (2018) Fixed-time control of delayed neural networks with impulsive perturbations. Nonlinear Anal Modell Control 23(6):904–920
Hu Y, Wang H, He S, Zheng J, Ping Z, Shao K, Cao Z, Man Z (2021) Adaptive tracking control of an electronic throttle valve based on recursive terminal sliding mode. IEEE Trans Veh Technol 70(1):251–262
Hu Y, Wang H (2020) Robust tracking control for vehicle electronic throttle using adaptive dynamic sliding mode and extended state observer. Mech Syst Signal Process 135:1–18
Acknowledgements
This work was supported by National Natural Science Foundation of China (61673247) and the Research Fund for Excellent Youth Scholars of Shandong Province (JQ201719). The paper has not been presented at any conference.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that none of the authors have any competing interests in the manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Yang, X., Li, X. & Duan, P. Finite-time lag synchronization for uncertain complex networks involving impulsive disturbances. Neural Comput & Applic 34, 5097–5106 (2022). https://doi.org/10.1007/s00521-021-05987-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-021-05987-8