
Abstract
There is a movement preparation cost for bimanual asymmetric reaching movements compared to bimanual symmetric movements. This is likely caused by the complex spatiotemporal coupling of bimanual asymmetric movements. The spatiotemporal coupling of bimanual reach-to-grasp movements has been investigated, but not the potential movement preparation costs. The purpose of the present study was to investigate the relationship between movement preparation costs and spatiotemporal coupling of reach-to-grasp movements. Twenty-four participants made unimanual, bimanual symmetric, and bimanual asymmetric reach-to-grasp movements in four-choice reaction time tasks. There was a movement preparation cost for bimanual symmetric reach-to-grasp movements compared to unimanual movements, which was not previously seen for reaching movements. Coordinating two symmetric grasps probably caused this bimanual symmetric cost, as we have previously shown that there is no bimanual symmetric cost for reaching movements. It was also surprising that the complexity of movement preparation was comparable for bimanual symmetric and asymmetric reach-to-grasp movements. However, the spatial coupling of bimanual asymmetric movements at movement initiation suggested that they were prepared as bimanual symmetric movements. Online control was then used to modify these symmetric reach-to-grasp movements into asymmetric movements. Preparing bimanual symmetric reach-to-grasp movements in advance instead of asymmetric movements likely prevented a bimanual asymmetric cost.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
We make coordinated movements with our upper limbs in many everyday tasks. The ease of these bimanual movements, however, conceals the complex coordination required by the central nervous system. Several studies have compared reaching movements (also called pointing or aiming movements) in unimanual, bimanual symmetric, and bimanual asymmetric conditions (e.g., Kelso et al. 1979; Marteniuk et al. 1984). Bimanual symmetric movements involve reaches to two targets with the same movement amplitude for each arm. Reaches to targets with different movement amplitudes are called bimanual asymmetric movements. Unimanual reaching movements with long amplitudes have longer movement time than unimanual movements with short amplitudes (Fitts and Peterson 1964; Kelso et al. 1979). Similarly, bimanual symmetric reaching movements with long amplitudes have longer movement time than bimanual symmetric movement with short amplitudes (Kelso et al. 1979). Movement time is also comparable between unimanual and bimanual symmetric conditions. There is a different pattern of results for bimanual asymmetric reaching movements. The arm with the long movement amplitude has a movement time that is comparable to long bimanual symmetric reaches. The movement time of the arm with the short movement amplitude, however, is much longer than short bimanual symmetric reaches. This is called temporal coupling; the hypothesis is that coupling both arms to a common movement time simplifies the preparation of bimanual asymmetric reaching movements (Kelso et al. 1979).
This hypothesis was tested by comparing the complexity of movement preparation for unimanual, bimanual symmetric, and bimanual asymmetric reaching movements (Blinch et al. 2014). We assumed that movements with more complex movement preparation would have longer reaction time (Donders 1969). In choice reaction time tasks, we observed that unimanual and bimanual symmetric reaching movements had comparable reaction time. This suggested that the complexity of movement preparation is comparable for unimanual and bimanual symmetric movements. Bimanual asymmetric reaching movements, in contrast, had longer reaction time than bimanual symmetric movements. This suggested that bimanual asymmetric movements have more complex movement preparation than bimanual symmetric movements.
This bimanual asymmetric cost can be explained by considering the spatiotemporal properties of bimanual reaching movements. There is an inherent tendency to make bimanual movements that are spatially and temporally coupled (Kelso et al. 1979, 1983; reviewed by; Swinnen 2002). The arms must be spatially decoupled at movement termination to make a bimanual asymmetric movement where each arm has a different movement amplitude. This spatial decoupling likely necessitates a greater complexity of movement preparation and causes the bimanual asymmetric cost. If bimanual asymmetric movements were also temporally decoupled, then this would likely further increase the complexity of preparation and the asymmetric cost. Instead, the arms are temporally coupled with a common movement time and this prevents the asymmetric cost from being even larger.
The purpose of the present study was to extend the investigation of bimanual preparation costs from bimanual reaching movements to bimanual reach-to-grasp movements. The preparation of bimanual reach-to-grasp movements is of theoretical interest for at least three reasons. First, reach-to-grasp movements have greater ecological validity because we typically reach for an object to then grasp (or manipulate) it. The reach-to-grasp movements in the present study, however, are still controlled movements that are likely different than bimanual reach-to-grasp movements in the real world. Second, the movement preparation and spatiotemporal coupling of bimanual reach-to-grasp movements are underexplored compared to bimanual reaching movements. (We will discuss four notable exceptions of bimanual reach-to-grasp research next.) Third, bimanual reach-to-grasp movements have yet to be tested in a choice reaction time task, which is required to measure the entire duration of movement preparation.
The study of bimanual reach-to-grasp movements is an extension of the study of unimanual reach-to-grasp movements. It was suggested that there is independent processing of the transport component and the grasp component of unimanual reach-to-grasp movements (Jeannerod 1981). There are specialised networks for the two components—for example, transport activates the superior parieto-occipital cortex and grasping activates the anterior intraparietal sulcus (Cavina-Pratesi et al. 2010)—but they are not completely independent (e.g. Monaco et al. 2015; Paulignan and Jeannerod 1996). Jackson et al. (1999) examined the spatiotemporal coupling of bimanual reach-to-grasp movements with symmetric and asymmetric movement amplitudes (Experiment 1) and target sizes (Experiment 2). They found the reaches and grasps of bimanual asymmetric movements were temporally coupled throughout the movement. It should be noted that the timing of each arm was not synchronised but similar and, thus, temporally coupled. Also, the strength of temporal coupling decreases when the asymmetry of the movements increases (Bingham et al. 2008; Mason and Bruyn 2009). Jackson and colleagues also found that the size of maximum grip aperture for asymmetric target sizes was independent. Dohle et al. (2000) extended this result and found that asymmetric grasps were spatially decoupled throughout the movement.
Mason and Bruyn (2009) examined the spatial coupling of asymmetric reaches throughout bimanual reach-to-grasp movements. We already noted that asymmetric reaches are spatially decoupled at movement termination, but what is spatial coupling like throughout the movement? They found that there was a consistent movement amplitude ratio between the arms. If the short movement amplitude was 5 cm and the long movement amplitude was 25 cm, for example, then the arms moved with a 1:5 amplitude ratio throughout the movement. The arms were not spatially coupled in an absolute sense (1:1), but there was relative spatial coupling (1:5).
To summarise, previous research on bimanual asymmetric reach-to-grasp movements has shown they are temporally coupled and that reaches exhibit relative spatial coupling, whereas grasps are spatially decoupled. In the present experiment, we investigated the relationship between the strength of spatiotemporal coupling and the complexity of movement preparation. Previous studies (Dohle et al. 2000; Jackson et al. 1999; Mason and Bruyn 2009) could not measure all the stages of movement preparation because they did not use choice reaction time tasks (Donders 1969). This study, therefore, was the first to explore the movement preparation of bimanual reach-to-grasp movements and how movement preparation is related to spatiotemporal coupling. We made two hypotheses: first, bimanual asymmetric movement would have more complex movement preparation than bimanual symmetric movements, and second, bimanual asymmetric movements would have weaker spatiotemporal coupling than symmetric movements.
Method
Participants
Twenty-four volunteer participants (mean age of 23.1 ± 4.8 years, 13 female and 11 male) were tested from the university community. All participants were right-handed [mean score of 0.95 ± 0.07 on a modified version of the Edinburgh (Oldfield 1971) and Waterloo (Brown et al. 2006) handedness questionnaires (see Stone et al. 2013 for the questionnaire)] and reported they had normal or corrected-to-normal vision. The research ethics board at the University of Lethbridge approved the study, and participants gave informed written consent before participation.
Apparatus
Participants were seated at a table. Three infrared light emitting diodes were attached on each of their upper limbs. These were attached close to the distal phalanx of the thumb, the distal phalange of the index finder, and the dorsal tubercle of the radius. The positions of the diodes were sampled at 400 Hz by an Optotrak Certus motion capture system (Northern Digital). Participants wore PLATO visual occlusion spectacles (Translucent Technologies) that controlled when participants received visual information.
On the table were two 1 × 1 Lego bricks (7.8 × 7.8 × 11.4 mm) that were 6 cm in from the edge of the table and 15 cm apart; these were the home positions for the reach-to-grasp movements. Participants were seated so that their midsagittal plane was centred between the home positions. The target objects for the reach-to-grasp movements were placed 10 or 20 cm in front of the left and right home positions. These distances are subsequently referred to as short and long movement amplitudes. The target objects were 2 × 2 or 2 × 4 mega blocks bricks (31.5 × 31.5 × 23.5, 63.5 × 31.5 × 23.5 mm); these bricks are subsequently referred to as the small and large target sizes.
Procedures
All trials began with the spectacles closed to occlude visual information. Participants used their sense of touch and their memory to grasp the home positions with pincer grasps. In the bimanual blocks, participants grasped the left and right home positions with their left and right hands. Only one home position was grasped in the unimanual blocks. A 500 ms tone then indicated the start of a variable 1–2 s foreperiod. After the foreperiod, the spectacles opened as the “go” signal. In the bimanual blocks, there were two target objects to reach and pincer grasp with the left and right hands. There was only one target object in the unimanual blocks. The target objects were small or large and they were placed a short or long distance from the home positions. The small and large objects required small and large pincer grasps that were parallel to the median plane. Participants were instructed to “reach, grasp, and lift the objects as quickly and accurately as possible when the spectacles open”. The objects were lifted approximately 5 cm off the table so that the hands and forearms were not touching the table. The objects were held in this position until the end of the 2-s recording interval of the Optotrak. The spectacles closed at this point as a cue for participants to place the objects on the table and to return to the home positions when ready to start the next trial.
Design
Participants began the experiment by completing the informed consent forms. They then completed the modified Edinburgh and Waterloo handedness questionnaire. This was followed by four blocks of reach-to-grasp movements in the following conditions: unimanual left, unimanual right, bimanual symmetric, and bimanual asymmetric. These blocks were counterbalanced first by unimanual and bimanual movements and then by left and right movements (unimanual) or symmetric and asymmetric movements (bimanual). This resulted in a counterbalance with eight orders, which we ran through three times.
The blocks were four-choice reaction time tasks. The four movements in each block are shown in Fig. 1. Each block consisted of 60 trials. The first 12 were practice trials and were excluded from data analysis; the last 48 were test trials. The blocks were four-choice reaction time and so there were 12 test trials of each movement type. The order of the movements was randomised, and a different randomisation was used for each block and participant.

The types of unimanual and bimanual movements tested. The top row shows the four types of movements in the unimanual left condition: long big, long small, short big, and short small. The same movements were made with the other hand in the unimanual right condition. The middle row shows the movements in the bimanual symmetric condition: long big–long big, long small–long small, short big–short big, and short small–short small. The bottom row shows the movements in the bimanual asymmetric condition: long big–short small, long small–short big, short big–long small, and short small–long big
Data analysis
The position data from the Optotrak were filtered with a low-pass Butterworth filter (dual-pass, 2nd-order) with a cutoff frequency of 20 Hz. When an Optotrak marker was missing for 20 ms or less, the position was linearly interpolated. Tangential velocity was calculated with a three-point central difference method. Grip aperture was calculated as the distance between the finger and thumb diodes. Reaction time for each arm was calculated as the time from the imperative stimulus until movement initiation. Movement initiation was determined by finding the first time after the imperative stimuli that tangential velocity of the index finger exceeded 50 mm/s. Movement time on unimanual trials was the time from movement initiation to movement termination. Movement time on bimanual trials was the time from the arm that initiated its movement first until movement termination of each arm. Movement initiation of the first arm was used so that the differences in movement initiation between the arms, albeit typically small, did not bias movement time as a measure of temporal coupling at movement termination.
Movement termination was calculated by taking the maximum of an objective function based on multiple sources of information (Schot et al. 2010). Our objective function was calculated by combining the following criteria: after movement initiation, grip aperture close to the target size, fingers close to the surface of the table, and fingers close to the target amplitude. Movement initiation and termination for each trial were visually inspected and corrected when necessary.
Each trial was labelled as “good” or “bad”. Types of bad trials included anticipation (reaction time < 100 ms), inattention (reaction time > 600 or movement time > 1000 ms), dropping the target object, or missing markers for more than 20 ms (8 frames). In total, 2.5% of all trials were bad and excluded from data analysis.
Reaction time quantified the complexity of movement preparation. Reaction time was analysed with a 3 condition (unimanual, bimanual symmetric, bimanual asymmetric) by 2 movement amplitude (long, short) by 2 target size (big, small) by 2 arm (left, right) repeated measures ANOVA. Temporal coupling of bimanual movements was measured by time of peak velocity for the reaches, time of maximum grip aperture for the grasps, and movement time for the reaches and grasps. These were analysed with 2 condition (bimanual symmetric, bimanual asymmetric) by 4 movement-type by 2 arm (left, right) repeated measures ANOVAs. The four movement types in the bimanual symmetric and asymmetric conditions are shown in Fig. 1.
Spatial coupling for bimanual movements was depicted by creating Lissajous plots of reaches and grasps. Lissajous plots are two-dimensional plots where the dependent variable of one arm is one axis and the other axis is the variable of the other arm. The instantaneous position of both arms is plotted as a point on the plot. We used two types of Lissajous plots; the first depicted the spatial coupling of the reaches and it plotted the movement amplitude of the left arm by the right arm. The second depicted the spatial coupling of the grasps by plotting the grip aperture of the left arm by the right arm. Spatial averages of these reach and grasp trajectories were calculated by dividing the movement path into 1000 points with equally spaced distance. Spatial averages are useful because they preserve the movement trajectory (at the expense of some temporal information) when averaged across trials and participants. The degree of spatial decoupling was quantified with the root-mean-square deviation (RMSD) between the spatial average of each trial and a straight line from the home position to the middle of the target amplitudes (reaches) or the target sizes (grasps) on the Lissajous plot. These lines represent ideal spatial coupling between the left and right arms, which is further detailed in the spatial coupling section of the “Results”. The RMSD of reaches and grasps were analysed with 2 condition (bimanual symmetric, bimanual asymmetric) by 4 movement-type repeated measures ANOVAs.
When local sphericity was violated (as indicated by Mauchly’s test, α < 0.10), the Huynh–Feldt correction was used when ε was greater than or equal to 0.75 and the Greenhouse–Geisser correction was used otherwise (Huynh and Feldt 1976). The uncorrected degrees of freedom and the ε values were reported (Huynh–Feldt εHF, Greenhouse–Geisser εGG). Significant main effects were analysed with pairwise comparisons, and significant interactions were examined with simple main effects. Main effects and lower-order interactions were not discussed when they were overridden by a higher-order interaction. The Šidák correction was used to control the familywise error rate. Reported values, unless otherwise noted, were means and 95% within-participant confidence intervals (Cousineau 2005; Morey 2008). An example of these values is 100, [90, 110], where 100 is the mean and the 95% within-participant confidence interval is 90–110.
Results
Movement preparation cost for bimanual movements compared to unimanual movements
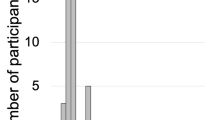
Mean reaction time for the conditions, movement amplitudes and target sizes are shown in Fig. 2. A visible trend in both graphs is that reaction time in the bimanual symmetric and asymmetric conditions appears longer than the unimanual condition. Reaction time was analysed with a 3 condition (unimanual, bimanual symmetric, bimanual asymmetric) by 2 movement amplitude (long, short) by 2 target size (big, small) by 2 arm (left, right) repeated measures ANOVA. There were significant condition by movement amplitude and condition by target size interactions (Fig. 2), F(2, 46) = 11, p < .001, ƐGG = 0.67, np2 = 0.32, F(2, 46) = 4.3, p = .036, np2 = 0.16. The interactions were analysed with simple main effects on both factors.

Reaction time in the unimanual, bimanual symmetric, and bimanual asymmetric conditions, specifically the condition by movement amplitude (left) and the condition by target size (right) interactions. Both graphs show that reaction time in the bimanual symmetric and asymmetric conditions was longer than in the unimanual condition. Error bars are 95% within-participant CIs (Cousineau 2005; Morey 2008)
In both interactions, bimanual symmetric and bimanual asymmetric reaction time was not different from each other, ps ≥ .445, and they were both longer than unimanual reaction time, ps ≤ .002. This suggests that there were movement preparation costs for bimanual movements compared to unimanual movements; this bimanual preparation cost was 15.5 ms, [10.6, 20.3] (between-participant confidence interval). There were no costs, however, for bimanual asymmetric movements compared to symmetric movements. This result was surprising because it was counter to our first hypothesis that bimanual asymmetric movement would have more complex movement preparation than bimanual symmetric movements. The condition by movement amplitude interaction also revealed that long movement amplitudes had longer reaction time than short movement amplitudes for unimanual, bimanual symmetric, and bimanual asymmetric conditions, ps ≤ .001. This is consistent with research on response complexity that typically finds that the duration or response programming increases with the complexity of the response (e.g. Henry and Rogers 1960; Klapp 2003).
Trajectories
The forward velocities and grip apertures from one participant are shown in Fig. 3. For the forward velocities (top row), peak velocity is visibly larger for long amplitude movements than short amplitude movements. Similarly, maximum grip aperture (bottom row) is visibly larger for movements to large targets compared to small targets. The spatiotemporal evolutions of these trajectories are analysed in the following sections of the Results.

Forward velocities (top row) and grip apertures (bottom row) from one participant. The first column shows the unimanual right condition: specifically, long big (solid black lines) and short small (solid grey lines) movements. The bimanual symmetric condition is shown in the second column: specifically, long big–long big (dashed black–solid black) and short small–short small (dashed grey–solid grey) movements. The third column shows the bimanual asymmetric condition: specifically, long big–short small (dashed black–solid black) movements
Reaches: weakest asymmetric spatial coupling when one arm has a long amplitude and a big target
The grand mean spatial averages of the reaches in the bimanual symmetric and asymmetric conditions are shown in Fig. 4, top. The reaches are shown as a Lissajous plot; the x-axis is the displacement of the right arm and the y-axis is the displacement of the left arm. The black lines illustrate ideal spatial coupling for the different types of movements. The lines with a slope of 1 are for symmetric movements. For the long–long movements (regardless of target size), for example, the left arm travels 200 mm and the right arm travels 200 mm. Ideal symmetric coupling involves the left arm travelling 1 mm for every 1 mm of the right arm, a 1:1 ratio. Short–short movements should also have a 1:1 movement ratio, but they will only travel half way up the line. The black lines with a slope of 2 are the ideal relative spatial coupling for long–short movements, regardless of the target sizes. The left arm travels 2 mm for every 1 mm of the right arm, a 2:1 ratio. Lastly, the black lines with a slope of 0.5 are the ideal relative spatial coupling for short–long movements. The farther the spatial average is from the line of ideal spatial coupling, the larger the RMSD and the weaker the spatial coupling.

Lissajous plots for bimanual symmetric reaches (top left) and grasps (bottom left) and bimanual asymmetric reaches (top right) and grasps (bottom left). The thin black lines demonstrate ideal spatial coupling
The RMSD of the spatial averages was analysed with a 2 condition by 4 movement-type repeated measures ANOVA. There was a significant condition by movement-type interaction, F(3, 69) = 11, p = .001, ƐGG = 0.54, np2 = 0.32, which was analysed with simple main effects on both factors. Bimanual asymmetric movements (11.9 mm, [11.0, 12.8]) had larger RMSD than symmetric movements (5.0 mm, [4.1, 5.9]), ps < .001. This suggests that bimanual asymmetric reaches have weaker spatial coupling than symmetric reaches. Bimanual symmetric movements with short movement amplitudes had smaller RMSD than symmetric movement with long amplitudes, ps ≤ .012. Notice that all types of bimanual asymmetric movements were initiated with 1:1 spatial coupling and slowly transition to 2:1 or 1:2 coupling by movement termination. RMSD was larger for asymmetric movements when one arm was long big and the other was short small (long big–short small 13.1 mm, [11.5, 14.7] or short small–long big 13.7 mm, [12.1, 15.2]; Fig. 4, top-right solid black or solid grey) than for asymmetric movements when one arm was long small and the other was short big (long small–short big 9.8 mm, [8.5, 11.1] or short big–long small 11.0 mm, [9.6, 12.3]; Fig. 4, top-right dashed grey or dashed black), ps < .001. This suggests that the strength of spatial coupling for asymmetric reaches is determined by movement amplitudes and target sizes. Spatial coupling is weaker when one arm has a long movement amplitude and a big target size compared to when one arm has a long movement amplitude and a small target size.
Grasps: weakest asymmetric spatial coupling when one arm has a long amplitude and a small target
The grand mean spatial averages of the grasps in the bimanual symmetric and asymmetric conditions are shown in Fig. 4, bottom. The grasps are shown as a Lissajous plot; the x-axis is the grip aperture of the right arm and the y-axis is the grip aperture of the left arm. The RMSD of the spatial averages was analysed with a 2 condition by 4 movement-type repeated measures ANOVA. There was a significant condition by movement-type interaction, F(3, 69) = 167, p < .001, ƐGG = 0.52, np2 = 0.88, which was analysed with simple main effects on both factors. Bimanual asymmetric movements (27.6 mm, [26.7, 28.5]) had larger RMSD than symmetric movements (5.9 mm, [5.0, 6.8]), ps < .001. This suggests that bimanual asymmetric grasps have weaker spatial coupling than symmetric grasps. Notice, again, that all types of bimanual asymmetric movements were initiated with 1:1 spatial coupling and slowly transition to 2:1 or 1:2 coupling by movement termination. RMSD was larger for asymmetric movements when one arm was long small and the other was short big (long small–short big 36.7 mm, [35.0, 38.5] or short big–long small 38.0 mm, [36.1, 39.8]; Fig. 4, bottom-right dashed grey or dashed black) than for asymmetric movements when one arm was long big and the other was short small (long big–short small 16.6 mm, [15.1, 18.2] or short small–long big 19.0 mm, [17.1, 20.8]; Fig. 4, bottom-right solid black or solid grey), ps < .001. This suggests the strength of spatial coupling for asymmetric grasps is determined by movement amplitudes and target sizes. Spatial coupling is weaker when one arm has a long movement amplitude and a small target size compared to when one arm has a long movement amplitude and a big target size.
Reaches: weakest asymmetric temporal coupling when one arm has a long amplitude and a big target
The time of peak velocity for the left and right arms of bimanual movements was compared to determine the temporal coupling of the reaches during movement execution. The time of peak velocity was analysed with a 2 condition (bimanual symmetric, bimanual asymmetric) by 4 movement type by 2 arm (left, right) repeated measures ANOVA. There was a significant three-way interaction, F(3, 69) = 28, p < .001, ƐHF = 0.82, np2 = 0.55, which was analysed with simple main effects on arm (Fig. 5). Peak velocity occurred slightly earlier for the right arm than the left for symmetric movements. This difference was not significant for long big–long big movements, p = .071, but it was significant for the other three symmetric movement types, ps ≤ .031. The time of peak velocity for asymmetric movements gradually changed from the right, occurring 19.5 ms, [15.4, 23.6] before the left for long big–short small movements, p < .001, to the left occurring 12.2 ms, [7.0, 17.4] before the right for short small–long big movements, p < .001. The left and right time of peak velocity for long small–short big and short big–long small movements was not different, ps ≥ .052.

The time of peak velocity for asymmetric movements depends on the movement amplitudes and the target sizes. When one arm is a long big movement and the other is a short small movement (long big–short small or short small–long big), the short small movement reaches peak velocity first. The short small movement likely reaches peak velocity first because it has a shorter movement amplitude and a smaller target size. The left and right arms of the other two asymmetric movements (long small–short big and short big–long small) reach peak velocity at similar times. This may be from a trade-off between the timing for short movement amplitudes and small target sizes (one arm had a short amplitude and the other had a small target). In the short big–long small movement, for example, the short movement amplitude of the left arm should reach peak velocity first. However, the small target size of the right arm should reach peak velocity first. The anticipated timing differences for these two parameters cancel each other out and cause peak velocity for the left and right arms to occur at similar times.
Grasps: weakest asymmetric temporal coupling when one arm has a long amplitude and a big target
The time of maximum grip aperture for the left and right arms of bimanual movements was compared to determine the temporal coupling of the grasps during movement execution. The time of maximum grip aperture was analysed with a 2 condition by 4 movement type by 2 arm repeated measures ANOVA. There was a significant three-way interaction, F(3, 69) = 78, p < .001, ƐGG = 0.51, np2 = 0.77, which was analysed with simple main effects on arm (Fig. 6). The time of maximum grip aperture for the left and right arms was not different for bimanual symmetric movements, ps ≥ .174. The time of maximum grip aperture for asymmetric movements gradually changed from the right, occurring 58.1 ms, [44.1, 72.2] before the left for long big–short small movements, p < .001, to the left occurring 62.8 ms, [50.8, 74.8] before the right for short small–long big movements, p < .001. The left and right time of maximum grip aperture for long small–short big movements was not different, p = .274.

The time of maximum grip aperture for asymmetric movements depends on the movement amplitudes and the target sizes. When one arm is a long big movement and the other is a short small movement (long big–short small or short small–long big), the short small movement reaches maximum grip aperture first. The left and right arms of the other two asymmetric movements (long small–short big and short big–long small) reach peak velocity at similar times. This could be caused by a trade-off between the timing for short movement amplitudes and small target sizes. This pattern of results for the timing of maximum grip aperture is the same as the pattern for the timing of peak velocity. Therefore, the reaches and the grasps had similar patterns of temporal coupling during movement execution.
Movement termination: weakest asymmetric temporal coupling when one arm has a long amplitude and a big target
The movement time for the left and right arms of bimanual movements was compared to determine the temporal coupling of the reaches and grasps at movement termination. Movement time was analysed with a 2 condition by 4 movement type by 2 arm repeated measures ANOVA. There was a significant three-way interaction, F(3, 69) = 20, p < .001, ƐGG = 0.60, np2 = 0.47, which was analysed with simple main effects on arm (Fig. 7). The movement time for the left and right arms was not different for bimanual symmetric movements, ps ≥ .067. The movement time for asymmetric movements gradually changed from the right occurring 24.8 ms, [13.4, 36.2] before the left for long big–short small movements, p = .001, to the left occurring 18.0 ms, [8.7, 27.3] before the right for short small–long big movements, p = .007.

Movement time for asymmetric movements depends on the movement amplitudes and the target sizes. When one arm is a long big movement and the other is a short small movement (long big–short small or short small–long big), the short small movement finishes its movement first. There was a trade-off between the timing for short movement amplitudes and small target sizes for the other two asymmetric movements (long small–short big and short big–long small). Unlike the trade-off for the time of peak velocity and time of maximum grip aperture, the short big movement ended before the long small movement. This suggests that the movement amplitude had a larger influence on the temporal coupling than target size at movement termination.
Discussion
Movement preparation costs
Movement preparation was more complex for bimanual symmetric movements compared to unimanual movements. Bimanual symmetric and asymmetric movements had comparable movement preparation. Thus, there was a bimanual symmetric cost for reach-to-grasp movements, but no bimanual asymmetric cost. The increased coordination required for two identical (bimanual symmetric) reach-to-grasp movements compared to one (unimanual) likely caused the bimanual symmetric cost. It is interesting that there was no bimanual asymmetric cost despite the need to spatially decouple the reaches and grasps of asymmetric movements.
We previously found a different pattern of bimanual costs for reaching movements (movements without grasps; Blinch et al. 2014). There was no bimanual symmetric cost, which suggests that the preparation of two identical (bimanual symmertic) reaching movements is comparable to the preparation of one (unimanual) movement. There was a bimanual symmetric cost for reach-to-grasp movements in the present experiment. Therefore, the bimanual symmetric cost for reach-to-grasp movements was likely caused by preparing two symmetric grasps and not caused by preparing two symmetric reaches.
There was a bimanual asymmetric cost for reaching movements in our previous study (Blinch et al. 2014). It is logical that preparing two spatially decoupled reaching movements (bimanual asymmetric) is more complex than preparing two spatially coupled reaching movements (bimanual symmetric). Why was there no bimanual asymmetric cost for reach-to-grasp movements in the present experiment? We will examine the spatiotemporal coupling of bimanual symmetric and asymmetric reach-to-grasp movements in the next section for insight into the lack of bimanual asymmetric cost.
Spatiotemporal coupling
Overall, the reaches and grasps of bimanual symmetric movements had strong spatiotemporal coupling. The spatiotemporal coupling of the reaches and grasps of bimanual asymmetric movements was weaker than those of symmetric movements. Temporal coupling of asymmetric movements was similar for reaches and grasps during movement execution (time of peak velocity, time of maximum grip aperture) and termination (movement time). It was weaker when one arm was long big and the other short small compared to when one arm was long small and the other short big. A long small–short big (or short big–long small) movement likely has strong temporal coupling because the anticipated timing differences for asymmetric movement amplitudes and asymmetric target sizes cancel each other out. Studies have shown that the strength of temporal coupling decreases when movement asymmetry increases (Bingham et al. 2008; Mason and Bruyn 2009). Both long big–short small and long small–short big movement are asymmetric, but the former is more asymmetric because the timing differences for the movement amplitudes and the targets sizes accumulate and weaken the temporal coupling. It then follows that long big–short small movements have weaker temporal coupling than long small–short big movements.
The spatial coupling of the reaches and grasps of bimanual asymmetric movements was weaker than symmetric movements. The spatial decoupling of asymmetric reaches and grasps was different during movement execution (Fig. 4), but there were two commonalities. First, spatial coupling of the reaches and grasps depended on the movement amplitudes and the target sizes. This is further evidence that the transport and grasp components of reach-to-grasp movements are not completely independent. This interdependence has been shown for unimanual movements (e.g. Monaco et al. 2015; Paulignan and Jeannerod 1996) and now as well for bimanual movements. Therefore, movement preparation of a bimanual asymmetric reach-to-grasp movement is exceedingly complex, as the transport and grasp components of both arms interact to determine the spatiotemporal properties of the movement.
Second, and most importantly, the reaches and grasps of bimanual asymmetric movements began with 1:1 absolute spatial coupling, just like bimanual symmetric movements. The spatial coupling of bimanual asymmetric movements then gradually transitioned from absolute coupling to 1:2 or 2:1 relative spatial coupling. This suggests that bimanual asymmetric movements may have been prepared and initiated as bimanual symmetric movements. They were then adjusted during movement execution to terminate as bimanual asymmetric movements. This potential movement preparation strategy has important implications for the lack of bimanual asymmetric cost, which we discuss in the next section.
Relationship between movement preparation costs and spatiotemporal coupling
We hypothesised in the Introduction that a decrease in the strength of spatiotemporal coupling for bimanual asymmetric movements would cause an increase in the magnitude of the bimanual asymmetric cost. Bimanual asymmetric movements had weaker spatiotemporal coupling than symmetric ones and, therefore, there should be a bimanual asymmetric cost. The complexity of movement preparation, however, was comparable for bimanual symmetric and asymmetric movements. There may have been no bimanual asymmetric cost, because a bimanual symmetric movement was prepared instead of an asymmetric one. These movements were then adjusted with online control to terminate as bimanual asymmetric movements. A bimanual asymmetric cost, therefore, may have been avoided by preparing bimanual symmetric movements instead of bimanual asymmetric movements. This strategy may be favoured when the bimanual asymmetric costs are particularly large and there is enough time for online control to transform bimanual symmetric movement into asymmetric movements. If participants had to make fast, ballistic reach-to-grasp movements, then there would not be enough time for online control to produce bimanual asymmetric movements. In this situation, participants should prepare bimanual asymmetric movements in advance and there should be a bimanual asymmetric cost. An example of this could be the bimanual reaching movements in our previous study (Blinch et al. 2014). These reaching movements were more ballistic with a mean asymmetric movement time of 316 ms. The reach-to-grasp movements in the present study were less ballistic with a mean asymmetric movement time of 489 ms. It is likely that the more ballistic reaching movements were fully planned in advance, which caused the bimanual asymmetric movement preparation cost.
Recall that Dohle et al. (2000) tested bimanual reach-to-grasp movements with asymmetric targets sizes, and they found that grasps were spatially decoupled throughout movement execution [This was an extension of Jackson et al. (1999) who found that the size of maximum grip aperture was spatially decoupled.]. These movements were likely fully planned before movement initiation, which should cause a preparation cost for bimanual asymmetric movements. However, the movements were not tested in a choice reaction time task (the targets were visible before the go signal), and so the duration of all the stages of movement preparation could not be recorded (Donders 1969) [This was also the case in the studies by Jackson et al. (1999) and Mason and Bruyn (2009).]. It could be interesting to retest these movement in choice reaction time to investigate whether a bimanual asymmetric cost occurs.
In the present study, we examined bimanual movements that were either symmetric or asymmetric. Asymmetry, however, can be on a range from almost symmetric to huge differences in spatiotemporal properties for the limbs. Our asymmetric movement amplitudes were 10 and 20 cm. These would be less asymmetric with amplitudes of 10 and 15 cm or more asymmetric with amplitudes of 10 and 40 cm. The asymmetry of the grasps can also be altered. Mason and Bruyn (2009), for example, increased the asymmetry of the grasps by increasing the size difference of the target objects (1 and 70 mm). At least two studies have further increased the asymmetries of the grasps by requiring a pincer grasp with one hand and a whole-hand grasp with the other (Dohle et al. 2000; Castiello et al. 1993). Studies have shown that increasing movement asymmetry decreases the strength of temporal coupling (Bingham et al. 2008; Mason and Bruyn 2009), and this may also be the case for spatial coupling. We predict that decreasing the strength of spatiotemporal coupling should increase the magnitude of the movement preparation cost. This relationship should occur for movements tested in choice reaction time tasks, as we detailed in the previous paragraph. It also requires the movements to be fully planned in advance, which, as we have seen in the present study, is not always the case.
In the current study, we focused on how asymmetric movement amplitudes and target sizes affected the spatiotemporal coupling of the limbs. Asymmetric movements, however, require more than complex spatiotemporal coupling of the limbs; they also require complex hand–eye coordination (e.g. Honda 1982). It has been shown that gaze strategies affect the spatiotemporal coupling of the limbs, especially when the targets are far apart and not both visible in peripheral vision (Miller and Smith 2003; Riek et al. 2003; Srinivasan and Martin 2010). Riek and colleagues, for example, found that participants tended to look at the right target until their hand reached it. The right hand would hover over the target while they then looked at the left target and moved that hand towards it. They then finish the movements to both targets simultaneously. We predict that gaze strategies would likely cause additional movement preparation costs. The gaze strategies also decrease the spatiotemporal coupling of the limbs, and this should contribute to the movement preparation costs. In sum, movement preparation costs can likely be caused by anything that increases the coordinative complexity of the task.
That movement preparation was more complex for bimanual symmetric compared to unimanual reach-to-grasp movements is surprising for two reasons. First, we found no preparation cost for bimanual symmetric reaches compared to unimanual ones (Blinch et al. 2014). Second, an fMRI study investigating differences between unimanual and bimanual button pressing found none (Koeneke et al. 2004). Both tasks elicited bilateral activation in premotor, somatosensory, posterior parietal, occipital, and inferiotemporal cortices. In the current study, we asked participants to reach, grasp, and lift the objects, and so it is possible that planning for bimanual reach-to-grasp actions requires distinct brain regions than unimanual or bimanual reaching or button pressing. There is, in fact, evidence that different cortical areas are activated during unimanual reaches compared to unimanual reach-to-grasp movements (Cavina-Pratesi et al. 2018; Gallivan et al. 2011).
In conclusion, movement preparation was more complex for bimanual symmetric reach-to-grasp movement than unimanual reach-to-grasp movements. Coordinating two symmetric grasps instead of one probably caused the bimanual symmetric cost, as we have previously shown that there is no bimanual symmetric cost for reaching movements (Blinch et al. 2014). It was surprising that the complexity of movement preparation was comparable for bimanual symmetric and asymmetric reach-to-grasp movements. However, the spatial coupling of bimanual asymmetric movements at movement initiation suggested that they were prepared as bimanual symmetric movements. Online control was then used to modify these symmetric movements into asymmetric movements. Preparing bimanual symmetric in advance instead of asymmetric movements likely prevented a bimanual asymmetric cost. This hypothesis could be tested with future experiments.
References
Bingham GP, Hughes K, Mon-Williams M (2008) The coordination patterns observed when two hands reach-to-grasp separate objects. Exp Brain Res 184(3):283–293
Blinch J, Cameron BD, Cressman EK, Franks IM, Carpenter MG, Romeo R (2014) Comparing movement preparation of unimanual, bimanual symmetric, and bimanual asymmetric movements. Exp Brain Res 232(3):947–955
Brown SG, Roy EA, Rohr LE, Bryden PJ (2006) Using hand performance measures to predict handedness. Laterality 11(1):1–14
Castiello U, Bennett KMB, Stelmach GE (1993) The bilateral reach to grasp movement. Behav Brain Res 56(1):43–57
Cavina-Pratesi C, Monaco S, Fattori P, Galletti C, McAdam TD, Quinlan DJ, Goodale MA, Culham JC (2010) Functional magnetic resonance imaging reveals the neural substrates of arm transport and grip formation in reach-to-grasp actions in humans. J Neurosci 30(31):10306–10323
Cavina-Pratesi C, Connolly JD, Monaco S, Figley TD, Milner AD, Schenk T, Culham JC (2018) Human neuroimaging reveals the subcomponents of grasping, reaching and pointing actions. Cortex 98:128–148
Cousineau D (2005) Confidence intervals in within-subject designs: a simpler solution to Loftus and Masson’s method. Quant Meth Psych 1(1):42–45
Dohle C, Ostermann G, Hefter H, Freund HJ (2000) Different coupling for the reach and grasp components in bimanual prehension movements. Neuroreport 11(17):3787–3791
Donders FC (1969) On the speed of mental processes. Acta Psychol 30:412–431
Fitts PM, Peterson JR (1964) Information capacity of discrete motor responses. J Exp Psychol 67(2):103–112
Gallivan JP, McLean DA, Valyear KF, Pettypiece CE, Culham JC (2011) Decoding action intentions from preparatory brain activity in human parieto-frontal networks. J Neurosci 31(26):9599–9610
Henry FM, Rogers DE (1960) Increased response latency for complicated movements and a “memory drum” theory of neuromotor reaction. Res Q 31(3):448–458
Honda H (1982) Rightward superiority of eye movements in a bimanual aiming task. Q J Exp Psychol A 34(4):499–513
Huynh H, Feldt LS (1976) Estimation of the box correction for degrees of freedom from sample data in randomized block and split-plot designs. J Educ Stat 1(1):69–82
Jackson GM, Jackson SR, Kritikos A (1999) Attention for action: coordinating bimanual reach-to-grasp movements. Br J Psychol 90(2):247–270
Jeannerod M (1981) Intersegmental coordination during reaching at natural visual objects. In: Long J, Baddeley A (eds) Attention and performance IX. Erlbaum, Hillsdale, pp 153–168
Kelso JAS, Southard DL, Goodman D (1979) On the coordination of two-handed movements. J Exp Psychol Hum Percept Perform 5(2):229–238
Kelso JAS, Putnam CA, Goodman D (1983) On the space–time structure of human interlimb co-ordination. Q J Exp Psychol A 35(Pt 2):347–375
Klapp ST (2003) Reaction time analysis of two types of motor preparation for speech articulation. J Mot Behav 35(2):135–150
Koeneke S, Lutz K, Wüstenberg T, Jäncke L (2004) Bimanual versus unimanual coordination: what makes the difference? Neuroimage 22(3):1336–1350
Marteniuk RG, MacKenzie CL, Baba DM (1984) Bimanual movement control: information processing and interaction effects. Q J Exp Psychol Hum Exp Psychol 36(A):335–365
Mason AH, Bruyn JL (2009) Manual asymmetries in bimanual prehension tasks: manipulation of object size and object distance. Hum Mov Sci 28(1):48–73
Miller KA, Smith MM (2003) Asynchrony in discrete bimanual aiming: evidence for visual strategies of coordination. Q J Exp Psychol 65(10):1911–1926
Monaco S, Sedda A, Cavina-Pratesi C, Culham JA (2015) Neural correlates of object size and object location during grasping actions. Eur J Neurosci 41(4):454–465
Morey RD (2008) Confidence intervals from normalized data: a correction to Cousineau (2005). Quant Meth Psych 4(2):61–64
Oldfield RC (1971) The assessment and analysis of handedness: the Edinburgh inventory. Neuropsychologia 9(1):97–113
Paulignan Y, Jeannerod M (1996) Prehension movements: the visuomotor channels hypothesis revisited. In: Wing AM, Haggard P, Flanagan JR (eds) Hand and brain: the neurophysiology of psychology of hand movements. Academic Press, San Diego, pp 265–282
Riek S, Tresilian JR, Mon-Williams M, Coppard VL, Carson RG (2003) Bimanual aiming and overt attention: one law for two hands. Exp Brain Res 153(1):59–75
Schot WD, Brenner E, Smeets JB (2010) Robust movement segmentation by combining multiple sources of information. J Neurosci Methods 187(2):147–155
Srinivasan D, Martin BJ (2010) Eye-hand coordination of symmetric bimanual reaching tasks: temporal aspects. Exp Brain Res 203(2):391–405
Stone KD, Bryant DC, Gonzalez CLR (2013) Hand use for grasping in a bimanual task: evidence for different roles? Exp Brain Res 224(3):455–467
Swinnen SP (2002) Intermanual coordination: from behavioural principles to neural-network interactions. Nat Rev Neurosci 3(5):348–359
Acknowledgements
We thank the two anonymous reviewers for their insightful critiques. The Natural Sciences and Engineering Research Council of Canada supported this research with a Tier II Canada Research Chair and a Discovery Grant awarded to Claudia Gonzalez.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
About this article

Cite this article
Blinch, J., Doan, J.B. & Gonzalez, C.L.R. Complexity of movement preparation and the spatiotemporal coupling of bimanual reach-to-grasp movements. Exp Brain Res 236, 1801–1813 (2018). https://doi.org/10.1007/s00221-018-5264-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-018-5264-9