
Abstract
The ability to coordinate the simultaneous movements of our arms is limited by a coalition of constraints. Some of these constraints can be overcome when the task conceptualisation is improved. The present study investigated how the movement preparation of bimanual reaching movements was affected by integrated visual feedback of the responses. Previous research has shown that the preparation of bimanual asymmetric movements takes longer than bimanual symmetric movements. The goal of the present study was to determine whether integrated, Lissajous feedback could eliminate this bimanual asymmetric cost. Fifteen participants made unimanual and bimanual symmetric and asymmetric reaches with separate feedback, where there was a cursor and a target for each hand. Participants also made bimanual symmetric and asymmetric movements with integrated feedback; a single cursor and a single target represented the locations and goals of both arms in this condition. The results showed a bimanual asymmetric cost with separate feedback, and that this cost persisted with integrated feedback. We suggest that integrated feedback improved continuous and discrete bimanual movements in other experiments by facilitating error detection and correction processes. We hypothesise that the bimanual asymmetric cost persisted in the present experiment because the uncertainty associated with choice reaction time prevented the facilitated error processing from improving the preparation of the next trial.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Making coordinated movements with both hands is common in our everyday activities. Despite their regularity, bimanual coordination presents a unique challenge for the central nervous system to control the movements of the hands. The types of bimanual coordination are limited by a coalition of constraints (reviewed by Swinnen and Wenderoth 2004). For example, the hands are often constrained to follow similar spatial paths with comparable timing, which are referred to as spatial and temporal coupling. Coordination constraints can arise from all levels of the central nervous system, from high-level cognitive processing to low-level interactions of the neuromuscular system. Research has shown that some constraints can be overcome when the task is conceptualised differently by the participants. The present study investigated how the movement preparation of bimanual reaching movements is affected by integrated visual feedback of the responses.
There are many examples of improving bimanual coordination by changing how the task is conceptualised. It is difficult to learn a tapping pattern where the right hand taps three times per interval and the left hand taps twice in the same interval (a 3:2 polyrhythm). This becomes easy to do when reciting “cold cup of tea,” and tapping with both hands on “cold,” the right hand on “cup,” the left hand on “of,” and the right hand again on “tea” (Klapp et al. 1998). Klapp and colleagues noted that performance of the once difficult polyrhythm was easy when the pair of rhythms was perceived as one coordinated action. They suggested that the polyrhythm was “controlled by an integrated sensory-motor representation encompassing both hands” (p 317). The representation may be similar to a perceptual Gestalt, where stimuli are perceived as a unified whole that is more than the sum of its parts. Likewise, the representation of the bimanual action was not the sum of two independent, unimanual actions.
This example, and others (e.g. Franz and McCormick 2010; Franz et al. 2001), shows that forming a unified representation of the task, a different conceptualisation, can overcome coordination constraints and improve performance. Exactly how conceptualisations overcome constraints “by enslaving the sensorimotor networks” (Swinnen and Wenderoth 2004, p 22) is currently being investigated (reviewed by Shea et al. 2016). Many studies have shown that the task conceptualisation can be changed and performance improved, by altering the real-time visual feedback of the task (Diedrichsen 2007; Murtha and Sainburg 2009; Shea et al. 2012). Diedrichsen (2007), for example, had participants reach with both arms to separate targets, and the real-time position of each arm was displayed with independent cursors. When one arm was perturbed during movement execution, an online correction was made in only the perturbed arm. The feedback was changed so that a single cursor represented the position of both hands, and the goal was to move to an integrated target. When one arm was perturbed in this condition, both arms made online corrections. This suggested the visual feedback changed how the task was conceptualised, which altered the bimanual feedback control. These results were extended to show that the visual feedback also affected the reflex response to the perturbation (Murtha and Sainburg 2009). There was a reflex response in only the perturbed arm when there were independent cursors. With an integrated cursor, there was a reflex response in both arms. Therefore, the task conceptualisation changed both the rapid reflexes and the slower voluntary response.
Another example of integrated, real-time visual feedback is Lissajous feedback. Lissajous feedback involves a two-dimensional plot where the position of one arm is one axis and the other axis is the position of the other arm. The instantaneous position of both arms is plotted as a point on the plot. This type of integrated feedback has been used to facilitate difficult continuous and discrete bimanual movements. For continuous bimanual movements, a coordination pattern of 90° relative phase is particularly difficult because it is midway between in-phase (0°) and anti-phase (180°; Kelso 1981). The movement will be repelled from the unstable 90° phase and attracted to the stability of either in- or anti-phase. It is possible to create a new attractor at 90° and stabilise performance, but this requires extended practice (e.g. Zanone and Kelso 1992; Swinnen et al. 1997a). In the study by Zanone and Kelso (1992), for example, participant practiced 90° relative phase coordination for 25 min over 5 days. This amounted to 2625 attempts to do the new coordination pattern. Some type of feedback is required to learn 90° relative phase (Schöner et al. 1992), and many studies have used a Lissajous figure for augmented feedback (Lee et al. 1995; Swinnen et al. 1997a, b, 1998). Lissajous feedback of 90° relative phase looks like a circle, and participants are instructed to move their arms in such a way that the augmented feedback draws circles.
Research has since shown that the 90° relative phase pattern can be effectively performed after only five minutes of practice with Lissajous feedback (e.g. Kovacs et al. 2009). This was achieved by removing visual feedback of the participants’ arms (Kovacs et al. 2010b) and by removing the metronome that paced the coordination pattern (Kovacs et al. 2009). Kovacs et al. (2009) argued that Lissajous feedback enabled performance by providing an integrated visual representation of the action. Furthermore, removing vision of the arms and the metronome allowed participants to focus on the salient feedback and not divide attention between several sources. They have even shown that this form of simplified Lissajous feedback can be used to facilitate more difficult bimanual coordination patterns, like a 5:3 coordination pattern (Kovacs et al. 2010a).
The previous examples of Lissajous feedback showed that it can improve the performance of continuous bimanual movements. The effect of Lissajous feedback on discrete bimanual movements has recently been investigated (Shea et al. 2012). Shea and colleagues tested unimanual and bimanual reaching movements to short- and long-distance targets. The bimanual reaching movements were either symmetric (the same distance target for both arms) or asymmetric (different distance targets for each arm). There were two feedback conditions: a control condition with a separate cursor and target for each arm, and a Lissajous condition with a single cursor that represented the positions of both arms and a single target. The movement goals were identical in both conditions, and the difference was whether there was separate feedback for each arm or integrated feedback for both arms.
The control condition with separate feedback was a replication of Kelso et al. (1979), experiment 1, and both experiments had comparable results. Movement time to long-distance targets was longer than short-distance targets for unimanual and bimanual symmetric movements. For bimanual asymmetric movements, the movement time of the arm to the long-distance target was comparable to long-distance movements in unimanual and bimanual symmetric movements. The critical finding was for the short-distance target; movement time was longer than unimanual and bimanual symmetric movements to the same targets. The movement time of the arms for bimanual asymmetric movements was comparable, despite the difference in target distances. Kelso and colleagues suggested the two arms were constrained to act as a single unit. An expression of this coordinative structure was the temporal coupling of the arms, which is most notable for bimanual asymmetric movements.
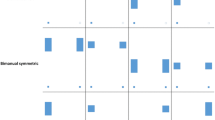
The display for bimanual movements in the Lissajous condition is shown in Fig. 1. Note that there was a “channel” leading to the bimanual asymmetric targets, and participants were told to move the cursor through this movement template to hit the target (Shea et al. 2012). The pattern of movement time for unimanual and bimanual symmetric movements was the same in the control and Lissajous conditions. Interestingly, the movement time of the arms in bimanual asymmetric conditions was not comparable. The movement time to the long- and short-distance targets was the same as their unimanual and bimanual symmetric counterparts. In other words, bimanual asymmetric movements were not temporally coupled. Shea and colleagues concluded that the movement template and “Lissajous feedback provided a clear movement goal and salient feedback, which allowed differential movement plans to be executed” (p 118).

Lissajous displays for Long–Long (left), Short–Short, Long–Short, and Short–Long bimanual movements. The position of the right arm was the x-axis, and the left arm was the y-axis. Notice that bimanual asymmetric movements included movement templates (the straight lines) that the participants had to move through to reach the targets. Adapted from Shea et al. (2012)
The bimanual symmetric and asymmetric movements in the studies by Kelso et al. (1979) and Shea et al. (2012) were tested in different blocks, where the same type of movement was repeated for a block of trials. When these movements are tested in choice reaction time, movement preparation is longer from the addition of processing stages (Blinch et al. 2014; Donders 1969). Furthermore, the movement preparation for bimanual asymmetric movements in choice reaction time is longer than symmetric movements (e.g. Blinch et al. 2014; Diedrichsen et al. 2006; Heuer and Klein 2006). This has been referred to as a bimanual asymmetric cost (Blinch et al. 2014, 2015a, b). The goal of the present study was to determine whether integrated feedback could eliminate the bimanual asymmetric cost. Shea and colleagues have shown that coordination constraints can be overcome when Lissajous feedback improves the conceptualisation of movements in blocked tasks. Diedrichsen (2007) and Murtha and Sainburg (2009) have shown that integrated feedback changed the conceptualisation of the task and altered movement execution. We speculated that Lissajous feedback would facilitate the performance of movements in choice reaction time tasks. An improved conceptualisation cannot change that movement preparation is longer in choice reaction time tasks compared to simple reaction time, and we did not test this. We predicted, however, that Lissajous feedback would facilitate movement preparation of bimanual asymmetric movement in choice reaction time and eliminate the bimanual asymmetric cost.
Methods
Participants
Fifteen volunteer participants (mean age of 24.8 ± 5.1 years, nine females) were tested from the university community. All participants reported they were right-handed and had normal or corrected-to-normal vision. The research ethics board at the University of British Columbia approved the study, and participants gave informed written consent before participation.
Apparatus
Participants were seated at a table in a darkroom, and each participant rested their head in a chin rest. On the surface of the table were two linear slides (Low-Profile Redi-Rail, PBC Linear) that were perpendicular to the front edge of the table. The linear slides were 150 mm apart, and participants were seated so that their midsagittal plane was in the middle of the slides. Participants held the handles of the left and right slides with their left and right hands. The slides allowed forward and backward movements of the arms with minimal friction and prevented movements in other directions. There was an Optotrak marker at the top of each handle, and these were sampled at 500 Hz by an Optotrak motion capture system (3020; Northern Digital).
Virtual stimuli were projected on the surface of the table by an LCD monitor positioned over the table. Midway between the table and the monitor was a half-silvered mirror; it created the illusion that the stimuli appeared on the table. The stimuli depended on whether separate feedback was given for each arm or integrated feedback was given for both arms. With separate feedback, the stimuli created a three-row by two-column array of square outlines (Fig. 2, left), and the two columns were aligned with the linear slides. The squares in the closest row to the participants were the two home positions, and they had a side length of 6.8 mm. The squares in the middle row were the short-distance targets, and the squares in the farthest row were the long targets; the targets had a side length of 30.6 mm. The vertical distance between the rows of targets was 75 mm centre-to-centre, and the horizontal distance between the two columns was 150 mm. Filling any of the square outlines directly cued that target; this is subsequently referred to as illuminating a target. The stimuli for separate feedback were remapped into a Lissajous display for integrated feedback. Stimuli for the right arm were mapped onto the x-axis, and the left arm was mapped onto the y-axis. The Lissajous display was then rotated 45° counterclockwise. This created an integrated display with one home position and four integrated targets (Fig. 2, right). The sizes of the integrated squares were the same as the combination of two squares with separate feedback. In other words, each integrated target represented the location of two of the targets with separate feedback. The right target in Fig. 2, right, is the integration of the short-distance target for the left arm and the long-distance target for the right arm.

Home positions, cursors, and unimanual targets with separate feedback (left) and the home position, cursor, and bimanual integrated targets with integrated feedback (right)
Testing occurred in a darkroom that prevented visual feedback of the participants’ arms and the linear slides. The darkroom allowed participants to focus on the visual stimuli on the table without being distracted by visual feedback from their arms or the slides. In the separate feedback condition, the position of the handle for each slide was displayed on the surface of the table in real time as a magenta circle with a 3.3 mm diameter. One circle was displayed that represented both arms in the integrated feedback condition. The coordinate systems of the Optotrak and the monitor were aligned with a six-point calibration procedure. There was a 16.7 ms time lag between receiving the current positions of the Optotrak markers and displaying the feedback on the monitor that was determined by the 60-Hz refresh rate of the LCD monitor. To compensate for this lag, the positions of the markers in the next frame were predicted based on the current and previous positions. These positions were used to calculate the instantaneous velocity, and then the velocity was used to predict the location of the marker in 16.7 ms.
Procedures
The procedure was slightly different in the various experimental conditions. The bimanual blocks with separate feedback began with the two home positions and the four target circles appearing. The home positions were illuminated, and participants were instructed to “start each trial by moving the cursors into the home positions.” Participants could not see their arms for the entire trial, but they could always see two small circles on the table surface that represented the positions of the handles in real time. A 1- to 2-s variable foreperiod began when the handles were in the home positions. The target circles changed colour from white to yellow to indicate that the foreperiod had begun. The imperative stimuli consisted of illuminating two targets (one on the left side and one on the right side) by filling the circles with green. Participants were instructed to “react and hit the targets as quickly as possible.” The positions of the handles at the end of the bimanual movement were displayed after the 2.0-s recording interval of the Optotrak. These endpoints and the correct targets were displayed in green for a target hit and red for a target miss. Participants were encouraged to use this feedback to help them with subsequent trials. The screen was blanked for 500 ms before beginning the next trial.
The differences in the unimanual left condition, for example, were that only stimuli for the left arm appeared and participants only moved the left handle. In the integrated feedback blocks, only the integrated targets that were required in the block were displayed. Thus, the top and bottom targets were displayed in the bimanual symmetric blocks and the left and right targets were displayed in the asymmetric blocks. The change in feedback was explained to participants by saying, “notice that there is one cursor that represents the position of both arms,” and encouraging them to explore the relationship between their movements and the movements of the cursor. Participants were instructed to “start each trial by moving the cursor into the home position. One target will illuminate as the go signal, and your task is to react and hit the target as quickly as possible.”
Each trial was labelled as “good” or “bad.” Types of bad trials included anticipation (reaction time <100 ms), inattention (reaction time >600 or movement time >600 ms), and target misses with either arm. In total, 23.2 % of all trials were bad and recycled to the end of the block. The majority of recycled trials were target misses (81.7 %). The “bad” trials were included in only the analysis on the proportion of target hits. If it was a bad trial, then a message explained the reason to the participants.
A “speed score” was given to participants after every eight good trials. This score gave participants feedback on their change in total response time (reaction time plus movement time) and was intended to motivate them to react and hit the targets as quickly as possible. It was calculated by comparing the mean total response time of the last eight good trials (collapsed across hand) to the previous eight good trials. The feedback told them how much faster or slower they were compared to the previous trials in milliseconds. If, for example, the mean total response time for the last eight trials was 500 ms and the mean total response time for the previous trials was 550 ms, then the speed score would be “50 ms faster” (500–550 ms = −50 ms).
Design
The experiment was conducted over two days. On the first day, unimanual and bimanual movements with separate feedback were tested. Bimanual movements with integrated feedback were examined on the second day. Movements with integrated feedback were always tested on the second day so that this experience did not bias movements with separate feedback. It is possible that testing the separate feedback condition first could affect performance on the subsequent integrated condition. Carry-over effects were minimised by testing the two conditions on different days and by giving participants three blocks of each integrated condition (instead of one) and analysing only the third block.
The first day consisted of four blocks of movements with separate feedback: unimanual left (Long, Short), unimanual right (Long, Short), bimanual symmetric (Long–Long, Short–Short), and bimanual asymmetric (Long–Short, Short–Long). The unimanual blocks were completed in succession and so were the bimanual blocks. The order of unimanual and bimanual groups of blocks was counterbalanced and so was the order of blocks within these groups.
The second day consisted of six blocks of movements with integrated feedback: three blocks of bimanual symmetric (Long–Long, Short–Short) and three blocks of bimanual asymmetric (Long–Short, Short–Long). Our pilot testing showed, somewhat surprisingly, that participants found the integrated feedback challenging and, for some participants, frustrating. We, therefore, tested all participants on the easier bimanual symmetric movements first. Participants practiced symmetric movements at a self-determined pace for 2.5 min to get a feel for the integrated feedback. They then completed three blocks where they were instructed to hit the target as quickly and accurately as possible. The three blocks allowed the participants to practice with the novel and challenging feedback. Importantly, performance on only the third block was evaluated in the Results section. The same procedure was then used for bimanual asymmetric movements.
Each block consisted of 48 trials. The blocks were two-choice reaction time, and so there were 24 movements of each type. In unimanual blocks, the choice was either a long- or a short-distance movement. The choice in symmetric blocks was either a Long–Long or a Short–Short movement, and it was either a Long–Short or a Short–Long movement in asymmetric blocks. In the bimanual symmetric blocks, for example, half of the movements were Long–Long and the other half were Short–Short. The order of the movements was randomised, and a different randomisation was used for each block and participant.
Data analysis
The dependent variables were reaction time, movement time, and proportion of target hits. Additionally, the spatiotemporal coupling during movement execution was quantified as a root-mean-square deviation, which is described below. The position data from the Optotrak were filtered with a dual-pass, second-order, low-pass, Butterworth filter with a cut-off frequency of 20 Hz. When an Optotrak marker was missing for 10 ms or less, the position was linearly interpolated. Velocity and acceleration in the forward–backward direction were calculated with three-point central difference method.
Reaction time for each arm was calculated as the time from the imperative stimulus until movement initiation. Movement initiation was determined by finding the first time after the imperative stimuli that velocity exceeded 50 mm/s. Movement time for each arm was calculated as the time from movement initiation of the first arm until movement termination. Movement initiation of the first arm was used so that the differences in movement initiation between the arms, albeit typically small, did not bias movement time as a measure of the temporal coupling at movement termination. Movement termination was determined by finding the first time after peak velocity that was less than 50 mm/s.
Spatiotemporal coupling for bimanual movements was depicted by creating Lissajous plots for separate and integrated feedback conditions. A spatial average of each trajectory was calculated by dividing the movement path into 1000 points with equally spaced distance. Spatial averages are useful because they preserve the movement trajectory (at the expense of some temporal information) when averaged across trials and participants. The degree of spatial decoupling was quantified with the root-mean-square deviation (RMSD) between the spatial average of each trial and a straight line from the home position to the middle of the target on the Lissajous plot. This line represents ideal spatiotemporal coupling as the ratio of the movement with the left arm to the movement with the right arm is consistent throughout the movement and will arrive at the target. (This is further detailed in Spatial coupling section of Results.)
Reaction time was analysed with a 5 Condition (separate unimanual, separate bimanual symmetric, separate bimanual asymmetric, integrated bimanual symmetric, and integrated bimanual asymmetric) repeated measures ANOVA. Movement time and proportion of target hits were analysed with 5 Condition by 2 Movement Distance (Long, Short) repeated measures ANOVAs. The skewness and kurtosis of the proportion of target hits were improved with the arcsine square-root transformation before statistical analysis; the data presented are proportions. Spatiotemporal coupling (RMSD) was analysed with a 2 Feedback (separate, integrated) by 4 Movement (Long–Long, Short–Short, Long–Short, Short–Long) repeated measures ANOVA.
When local sphericity was violated (as indicated by Mauchly’s test, α < 0.10), the Huynh–Feldt correction was used when the ε was greater than or equal to 0.75 and the Greenhouse–Geisser correction was used otherwise (Huynh and Feldt 1976). The uncorrected degrees of freedom and the ε values were reported (Huynh–Feldt εHF, Greenhouse–Geisser εGG). Significant main effects were analysed with pairwise comparisons, and significant interactions were examined with simple main effects. The Šidák correction was used to control the familywise error rate. Cohen’s d was calculated for these post hoc tests with the pooled standard deviation. Reported values, unless otherwise noted, were means and 95 % within-participant confidence intervals (Cousineau 2005; Morey 2008). An example of these values is 100, [90, 100], where 100 is the mean and the 95 % within-participant confidence interval is 90–100.
Results
Longer reaction time for bimanual asymmetric movements with separate and integrated feedback
Reaction time (Fig. 3) was analysed with a 5 Condition (separate unimanual, separate bimanual symmetric, separate bimanual asymmetric, integrated bimanual symmetric, and integrated bimanual asymmetric) repeated measures ANOVA. There was a significant main effect of Condition, F(4,56) = 27, p < .01, ε GG = .54, η 2p = .66, which was analysed with pairwise comparisons. Unimanual (mean 265 ms, 95 % within-participant confidence interval [255, 275]) and bimanual symmetric reaction time values (279 ms, [270, 288]) were not significantly different with separate feedback, p = .15, d = 0.33. Bimanual asymmetric reaction time (308 ms, [296, 320]) was significantly longer than symmetric reaction time with separate feedback, p < .01, d = 0.54. This supported our previous research that found a movement preparation cost for bimanual asymmetric movements and not for bimanual symmetric movements (Blinch et al. 2014). Bimanual asymmetric reaction time (340 ms, [322, 358]) was significantly longer than symmetric reaction time (286 ms, [277, 296]) with integrated feedback, p < .01, d = 1.00. Bimanual symmetric and asymmetric reaction time values with integrated feedback were not significantly different than their respective counterpart bimanual symmetric and asymmetric reaction time with separate feedback, p = .95, d = 0.15, p = .13, d = 0.55. Finally, a paired samples t test confirmed that the bimanual asymmetric cost with integrated feedback (53.6 ms, [40.0, 67.3]) was significantly larger than the cost with separate feedback (29.1 ms, [15.5, 42.8]), t(14) = 2.7, p = .02, d = 0.98. The integrated feedback, therefore, did not eliminate the movement preparation cost for bimanual asymmetric movements.

Integrated bimanual asymmetric movements had longer movement time than the other conditions
Movement time (Fig. 4) was analysed with a 5 Condition by 2 Movement Distance (Long, Short) repeated measures ANOVA. There were significant main effects of Distance and Condition, F(1,14) = 198, p < .01, η 2p = .93, F(4,56) = 14, p < .01, ε GG = .41, η 2p = .49. The movement time to long-distance targets (302 ms, [295, 309]) was significantly longer than short targets (238 ms, [231, 245]), p < .01, d = 1.06. Pairwise comparisons on the main effect of Condition showed that movement time in the integrated asymmetric condition (345 ms, [301, 389]) was significantly longer than the separate unimanual, separate symmetric, and integrated symmetric conditions, ps < .02. The remaining pairwise comparisons were not significantly different. The Condition by Distance interaction was not significant, F(4,56) = 2.1, p = .16, ε GG = .37, η 2p = .13, and therefore, the typical movement time coupling of bimanual asymmetric movements was not seen (Kelso et al. 1979; Shea et al. 2012). Visually, however, there was some temporal coupling for bimanual asymmetric movements with separate feedback. Notice how the short-distance bimanual asymmetric movement (245 ms, [227, 264]) appears longer than the short-distance symmetric movement (211 ms, [195, 228]), t(14) = 3.5, p < .01, d = 0.53. This suggests partial temporal coupling at movement termination for bimanual asymmetric movements with integrated feedback.

Fewer target hits with integrated feedback
The proportion of targets were analysed with a 5 Condition by 2 Distance repeated measures ANOVA. There were significant main effects of Condition, F(4,56) = 6.3, p < .01, η 2p = .31, Distance, F(1,14) = 6.5, p = .02, η 2p = .32, and a significant Condition by Distance interaction, F(4,56) = 32, p < .01, η 2p = .70. The interaction was analysed with simple main effects on Condition. For long-distance movements, bimanual symmetric movements with integrated feedback (83.2 %, [78.9, 87.5]) had significantly fewer targets hits than the other movements (which ranged from 90.8 % [88.9, 92.8] to 93.8 % [92.0, 95.5]), ps < .03. For short-distance movements, bimanual asymmetric movements with integrated feedback (76.7 % [70.9, 82.5]) had significantly fewer target hits than the other movements (these ranged from 92.8 % [89.5, 96.1] to 96.3 % [93.7, 98.8]), ps < .01. These results suggested that the integrated targets were harder to hit than the separate targets.
Spatiotemporal coupling: asymmetric movements had comparable coupling with separate or integrated feedback
The grand mean spatial averages for bimanual symmetric and asymmetric movements with separate and integrated feedback are shown in Fig. 5. The dotted lines demonstrate ideal spatiotemporal coupling to the four targets; for example, the line to the left of the vertical line, with a slope of 2, is for the Long–Short target. In this movement, the left arm travels 150 mm and the right arm travels 75 mm. Therefore, ideal asymmetric coupling involves the left arm travelling 2 mm for every 1 mm of the right arm, a 2:1 ratio. Ideal symmetric coupling for Long–Long and Short–Short movements entail a 1:1 movement ratio and 1:2 ratio for Short–Long movements. The distance where the spatial averages are away from the dotted lines represents the degree of spatiotemporal decoupling.

Grand mean spatial averages with separate feedback (left) and integrated feedback (right). The dotted straight lines show ideal spatiotemporal coupling to the four targets. The vertical line is for the Short–Short target (midpoint) and the Long–Long target (endpoint). The line to the left is the Long–Short target, and the line to the right is the Short–Long target
For the movements with separate feedback (Fig. 5, left), the spatial averages of symmetric movements had close to ideal spatiotemporal coupling. Asymmetric movements deviated from ideal asymmetric coupling, but the spatial averages were only slightly curved. The curvature of Long–Short and Short–Long movements towards the middle line with a slope of 1 suggested that asymmetric movements experienced some coupling towards a 1:1 symmetric movement. The pattern of results with integrated feedback (Fig. 5, right) was strikingly similar: symmetric movements had close to ideal symmetric coupling, and asymmetric movements had some coupling towards a symmetric movement.
The degree of spatiotemporal coupling was quantified with the RMSD between the spatial average and the line of ideal coupling. The RMSD of the spatial averages was analysed with 2 Feedback by 4 Movement repeated measures ANOVA. There was a significant main effect of Movement, F(3,42) = 529, p < .01, ε GG = .59, η 2p = .97. The RMSD of bimanual symmetric movements (Long–Long 5.1 mm, [3.9, 6.3]; Short–Short 3.7 mm, [2.8, 4.6]) was significantly smaller than asymmetric movements (Long–Short 27.6 mm, [26.1, 29.1]; Short–Long 26.5 mm, [25.3, 27.7]), ps < .01. The RMSD of Long–Short and Short–Long movements was not significantly different, p = .70, d = 0.40. The RMSD of Long–Long movements was significantly larger than Short–Short movements, p < .01, d = 0.76. Therefore, bimanual symmetric movements had close to ideal symmetric coupling. Bimanual asymmetric movements deviated slightly away from ideal asymmetric coupling in the direction of symmetric coupling.
There was a significant Feedback by Movement interaction, F(3,42) = 4.5, p = .03, ε GG = .56, η 2p = .24, which was analysed with simple main effects on Movement. The pattern of results with separate and integrated feedback was very similar to the main effect of Movement: the RMSD of symmetric movements was significantly smaller than asymmetric movements, ps < .01. With separate feedback, the RMSD of symmetric movements (Long–Long 4.3 mm, [2.9, 5.6]; Short–Short 3.2 mm, [2.2, 4.3]) was not significantly different, p = .06, d = 0.71, and the RMSD of Long–Short movements (29.2 mm, [26.8, 31.6]) was significantly larger than Short–Long movements (25.9 mm, [24.7, 27.2]), p = .035, d = 1.00. This pattern was reversed with integrated feedback. The RMSD of Long–Long movements (5.9 mm, [4.7, 7.2]) was significantly larger than Short–Short movements (4.2 mm, [3.4, 5.0]), p < .01, d = 0.84, and the RMSD of asymmetric movements (Long–Short 26.0 mm, [23.2, 28.7]: Short–Long 27.1 mm, [24.8, 29.5]) was not significantly different, p = 1.00, d = 0.25. Even with this interaction, the overall findings were that symmetric movements had close to ideal symmetric coupling and asymmetric movements deviated slightly from ideal asymmetric coupling in the direction of symmetric coupling.
Discussion
The goal of the present experiment was to determine whether integrated visual feedback of the responses could eliminate the movement preparation cost for bimanual asymmetric reaching movements. There was a movement preparation cost for bimanual asymmetric movements with separate feedback. This supports the bimanual asymmetric cost found in previous studies (e.g. Blinch et al. 2014; Diedrichsen et al. 2006; Heuer and Klein 2006). The bimanual asymmetric cost was neither eliminated nor attenuated with integrated feedback; in fact, the cost was larger than with separate feedback. The Lissajous feedback, therefore, did not simplify the movement preparation of bimanual asymmetric movements. There were other indications that bimanual movements were harder with integrated feedback than separate feedback: first, bimanual movements with integrated feedback had fewer target hits than with separate feedback, and second, bimanual asymmetric movements with integrated feedback had longer movement time than symmetric movements. These results suggest that integrated feedback made movement preparation more complex. Integrated feedback, contrary to our initial prediction, did not simplify movement preparation, even if it did appear to change how participants conceptualised the task. This is in contrast to the simplification of bimanual movements with integrated feedback in previous studies (Diedrichsen 2007; Kovacs et al. 2009; Murtha and Sainburg 2009; Shea et al. 2012).
Integrated feedback improves the performance of continuous bimanual movements, including 90° relative phase coordination (Kovacs et al. 2009, 2010a, b; Lee et al. 1995; Swinnen et al. 1997a, b, 1998). This research suggested that Lissajous feedback allows participants to conceive the goal relationship between the arms in an integrated and simplified way. Shea et al. (2016) have argued that integrated feedback, specifically Lissajous feedback, may facilitate performance of complex coordination patterns with three mechanisms. First, integrated feedback likely reduces the perceptual demands of the task. Integrated feedback involves one cursor that represents the positions of both arms, and so the participant can focus their attention on this location instead of splitting their attention between two cursors that represent the position of each arm. This was reinforced by the finding that removing the metronome, a competitor for attention, during 90° relative phase coordination with Lissajous feedback improved performance (Kovacs et al. 2009). Second, integrated feedback may promote an external focus of attention, which is more beneficial than an internal focus of attention in many tasks (reviewed in Wulf 2013). This could explain the finding that performance with Lissajous feedback is improved when vision of the limbs, a potential internal focus of attention, was occluded (Kovacs et al. 2010b). Third, integrated feedback likely facilitates error detection and correction processes. Comparing 90° coordination with Lissajous feedback to a circle template, for example, simplifies error detection and may allow participants to “tune-in” their movements to correct the relative phase.
Integrated feedback also improves online corrections to perturbations of discrete bimanual movements (Diedrichsen 2007; Murtha and Sainburg 2009). This improvement can be explained by the third mechanism of integrated feedback that it facilitates error detection and correction processes. It is important to note that this mechanism facilitates processing during movement execution and not movement preparation. In the present study, we were testing whether integrated feedback would facilitate processing during movement preparation and it did not. It may be that an integrated conceptualisation can facilitate processing during movement execution but not during movement preparation. Alternatively, the integrated feedback used in the present study (which can benefit ongoing motor control) did not change the task conceptualisation in a manner that simplified how movements were prepared.Footnote 1
Shea et al. (2012) found that Lissajous feedback and movement templates allowed participants to decouple their bimanual asymmetric movements. The short movement time for discrete movements in their study (~150–250 ms) presents a limited opportunity for error detection and correction processes. They argued, however, that error detection on a given trial can be used to improve the planning of the next trial. In different terms, the facilitated processing during movement execution carried over to the movement preparation of the subsequent trial. This was likely possible because each type of movement was tested in a separate block. The instruction in the study by Shea and colleagues was to initiate the movement anytime after the ready signal. This is not a reaction time task, and reaction time was not measured. There is, therefore, no measure of movement preparation to investigate potential changes between trials. To summarise, the integrated feedback facilitated error detection and correction processes during movement execution. This improved the movement preparation on the next trial because the same movement was repeated for a block of trials.
In the present study, we investigated whether integrated feedback would eliminate the movement preparation cost for bimanual asymmetric movements in choice reaction time. As previously noted, the bimanual asymmetric cost was actually larger with integrated feedback than separate feedback. Why did using integrated feedback not eliminate the asymmetric cost? We hypothesised that integrated feedback improves error detection and correction processes (Diedrichsen 2007; Murtha and Sainburg 2009) and this does not affect movement preparation in choice reaction time. Integrated feedback and movement templates did allow for decoupled bimanual asymmetric movements in the study by Shea et al. (2012). We hypothesised that the integrated feedback in the study by Shea et al. (2012) facilitated error detection and correction processes during movement execution. This improved the movement preparation on the next trial because the same movement was repeated for a block of trials. This improvement in movement processing of the next trial is unlikely to occur in choice reaction time tasks. In choice reaction time, the error processing on a given trial does not apply to the next trial if it is a different movement. The movement uncertainty in choice reaction time tasks likely prevents the facilitated error processing on a given trial from facilitating the preparation of the next trial. The movements in the present study were performed in two-choice reaction time tasks. The integrated feedback, therefore, did not improve movement preparation, and the bimanual asymmetric cost persisted.
There is one study where unified stimuli eliminated the bimanual asymmetric cost. Franz and McCormick (2010) tested bimanual symmetric and asymmetric movements in choice reaction time tasks. In the separate condition, a target circle was presented for each hand. These target circles were connected by a line in the unified condition. Note that the separate and unified targets disappeared at movement onset. The bimanual asymmetric cost in the separate condition was eliminated in the unified condition. Movement time was comparable in the separate and unified conditions. The change in stimuli in the unified condition is very different from integrated, Lissajous feedback. We suspect the type of unified stimuli and feedback changes performance in difference ways. Lissajous feedback likely facilitates error detection and correction processes, whereas the connecting line used by Franz and McCormick somehow improved movement preparation by promoting a different conceptualisation of the task.
To summarise, the bimanual asymmetric cost was not eliminated by integrated feedback. This cost is caused by increased processing demands on movement preparation. Integrated feedback does simplify continuous bimanual movements and discrete movements in blocked tasks, but it likely does so by facilitating error detection and correction processes. The facilitation of error processing, however, did not affect movement preparation in choice reaction time tasks. Therefore, movement preparation was unaltered with integrated feedback and the bimanual asymmetric cost persisted. These results suggest the vital mechanism for the improved performance of complex coordination patterns with integrated feedback, specifically Lissajous feedback, is the facilitation of error detection and correction processes. This appears to benefit the ongoing execution of a movement but it did not improve movement preparation in choice reaction time tasks. Determining how different conceptualisation might improve movement preparation is an avenue for future research.
Notes
Our thanks to Professor HN Zelaznik and an anonymous reviewer for suggesting this hypothesis.
References
Blinch J, Cameron BD, Cressman EK, Franks IM, Carpenter MG, Romeo R (2014) Comparing movement preparation of unimanual, bimanual symmetric, and bimanual asymmetric movements. Exp Brain Res 232(3):947–955
Blinch J, Cameron BD, Franks IM, Carpenter MG, Chua R (2015a) Facilitation and interference during the preparation of bimanual movements: contributions from starting locations, movement amplitudes, and target locations. Psychol Res 79(6):978–988
Blinch J, Franks IM, Carpenter MG, Chua R (2015b) Unified nature of bimanual movements revealed by separating the preparation of each arm. Exp Brain Res 233(6):1931–1944
Cousineau D (2005) Confidence intervals in within-subject designs: a simpler solution to Loftus and Masson’s method. Quant Meth Psych 1(1):42–45
Diedrichsen J (2007) Optimal task-dependent changes of bimanual feedback control and adaptation. Curr Biol 17(19):1675–1679
Diedrichsen J, Grafton S, Albert N, Hazeltine E, Ivry RB (2006) Goal-selection and movement-related conflict during bimanual reaching movements. Cereb Cortex 16(12):1729–1738
Donders FC (1969) On the speed of mental processes. In: Koster WG (ed and trans) Attention and performance II. North-Holland, Amsterdam, pp 412–431 (original work published in 1868)
Franz EA, McCormick R (2010) Conceptual unifying constraints override sensorimotor interference during anticipatory control of bimanul action. Exp Brain Res 205(2):273–282
Franz EA, Zelaznik HN, Swinnen S, Walter C (2001) Spatial conceptual influences on the coordination of bimanual actions: when a dual task becomes a single task. J Mot Behav 33(1):103–112
Heuer H, Klein W (2006) The influence of movement cues on intermanual interactions. Psychol Res 70(4):229–244
Huynh H, Feldt LS (1976) Estimation of the box correction for degrees of freedom from sample data in randomized block and split-plot designs. J Educ Stat 1(1):69–82
Kelso JAS (1981) On the oscillatory basis of movement. Bull Psychon Soc 18(1):63
Kelso JAS, Southard DL, Goodman D (1979) On the coordination of two-handed movements. J Exp Psychol Hum Percept Perform 5(2):229–238
Klapp ST, Nelson JM, Jagacinski RJ (1998) Can people tap concurrent bimanual rhythms independently? J Mot Behav 30(4):301–322
Kovacs AJ, Buchanan JJ, Shea CH (2009) Bimanual 1:1 with 90 continuous relative phase: difficult or easy! Exp Brain Res 193(1):129–136
Kovacs AJ, Buchanan JJ, Shea CH (2010a) Impossible is nothing: 5:3 and 4:3 multi-frequency bimanual coordination. Exp Brain Res 201(2):249–259
Kovacs AJ, Buchanan JJ, Shea CH (2010b) Perceptual and attentional influences on continuous 2:1 and 3:2 multi-frequency bimanual coordination. J Exp Psychol Hum Percept Perform 36(4):936–954
Lee TD, Swinnen SP, Verschueren S (1995) Relative phase alterations during bimanual skill acquisition. J Mot Behav 27(3):263–274
Morey RD (2008) Confidence intervals from normalized data: a correction to Cousineau 2005. Quant Meth Psych 4(2):61–64
Murtha PK, Sainburg RL (2009) Shared bimanual tasks elicit bimanual reflexes during movement. J Neurophysiol 102(6):3142–3155
Schöner G, Zanone PG, Kelso JAS (1992) Learning as change of coordination dynamics: theory and experiment. J Mot Behav 24(1):29–48
Shea CH, Boyle J, Kovacs AJ (2012) Bimanual Fitts’ task: Kelso, Southard, and Goodman, 1979 revisited. Exp Brain Res 216(1):113–121
Shea CH, Buchanan JJ, Kennedy DM (2016) Perception and action influences on discrete and reciprocal bimanual coordination. Psychon Bull Rev 23(2):361–386
Swinnen SP, Wenderoth N (2004) Two hands, one brain: cognitive neuroscience of bimanual skill. Trends Cogn Sci 8(1):18–25
Swinnen SP, Lee TD, Verschueren S, Serrien DJ, Bogeards H (1997a) Interlimb coordination: learning and transfer under different feedback conditions. Hum Mov Sci 16(6):749–785
Swinnen SP, Dounskaia N, Walter CB, Serrien DJ (1997b) Preferred and induced coordination modes during the acquisition of bimanual movements with a 2:1 frequency ratio. J Exp Psychol Hum Percept Perform 23(4):1087–1110
Swinnen SP, Verschueren SMP, Bogaerts H, Dounskaia N (1998) Age-related deficits in motor learning and differences in feedback processing during the production of a bimanual coordination pattern. Cogn Neuropsychol 15(5):439–466
Wulf G (2013) Attentional focus and motor learning: a review of 15 years. Int Rev Sport Exerc Psychol 6(1):77–104
Zanone PG, Kelso JAS (1992) Evolution of behavioral attractors with learning: nonequilibrium phase transitions. J Exp Psychol Hum Percept Perform 18(2):403–421
Acknowledgments
Our thanks to Professor HN Zelaznik and two anonymous reviewers for their helpful critiques. The Natural Sciences and Engineering Research Council of Canada supported this research with a discovery grant awarded to Romeo Chua. Guilherme de Cellio Martins was supported with a Ciência sem Fronteiras (Science Without Borders) scholarship, which was funded by the Brazilian Ministry of Education, the Brazilian Ministry of Science and Technology, and the Canadian Bureau for International Education.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki Declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Rights and permissions
About this article

Cite this article
Blinch, J., de Cellio Martins, G. & Chua, R. Effects of integrated feedback on discrete bimanual movements in choice reaction time. Exp Brain Res 235, 247–257 (2017). https://doi.org/10.1007/s00221-016-4788-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-016-4788-0