
Abstract
What determines coordination patterns when both hands reach to grasp separate objects at the same time? It is known that synchronous timing is preferred as the most stable mode of bimanual coordination. Nonetheless, normal unimanual prehension behaviour predicts asynchrony when the two hands reach towards unequal targets, with synchrony restricted to targets equal in size and distance. Additionally, sufficiently separated targets require sequential looking. Does synchrony occur in all cases because it is preferred in bimanual coordination or does asynchrony occur because of unimanual task constraints and the need for sequential looking? We investigated coordinative timing when participants (n = 8) moved their right (preferred) hand to the same object at a fixed distance but the left hand to objects of different width (3, 5, and 7 cm) and grip surface size (1, 2, and 3 cm) placed at different distances (20, 30, and 40 cm) over 270 randomised trials. The hand movements consisted of two components: (1) an initial component (IC) during which the hand reached towards the target while forming an appropriate grip aperture, stopping at (but not touching) the object; (2) a completion component (CC) during which the finger and thumb closed on the target. The two limbs started the IC together but did not interact until the deceleration phase when evidence of synchronisation began to appear. Nonetheless, asynchronous timing was present at the end of the IC and preserved through the CC even with equidistant targets. Thus, there was synchrony but requirements for visual information ultimately yielded asynchronous coordinative timing.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
It is a matter of common observation that adult humans are skilled at coordinating the right and left hands when reaching to grasp two separate objects at the same time. The question is whether the two hands are synchronised in time during such reaches? There has been little investigation into how the nervous system coordinates the actions of the two limbs in bimanual prehension. Those studies that explored bimanual prehension tended to investigate the two hands reaching to a single object (e.g. Castiello et al. 1993; Tresilian and Stelmach 1997). Jackson et al. (1999) conducted one of the few studies into bimanual prehension directed at two separated objects. Jackson et al. (1999) found that bimanual movements took longer but were otherwise unaffected as to whether the actions required of each hand were the same or different. Jackson et al. suggested that synchronising the limbs to a fixed duration solves the problem of executing incongruent bimanual movements. Jackson et al.’s study has made an important contribution to our understanding of bimanual prehension but it leaves some issues unresolved. In particular, it remains unclear as to how the nervous system produces coordinated movements to targets of different sizes at different distances.
The results of previous bimanual coordination studies involving tasks other than prehension suggest that the hands often interact and show synchronous coordination, that is, each hand doing a similar thing at the same time (e.g. for rhythmic movement see Kelso et al. 1979a,b; for discrete movements see Diedrichsen et al. 2001). The most widely studied bimanual coordination tasks involve rhythmic movement of different limbs, for instance, the left and right wrists. Such movements interact to produce characteristic stable modes of coordination with synchronous movement being the most stable (see, for instance, Kelso 1995). The coupling between the two movements is often based on visual information as verified in studies where two different people each move a joint rhythmically and coordinate movement (e.g. Schmidt et al. 1990). Subsequently, a large number of studies have established the role of perception in coupling the limbs in bimanual coordination (Bingham 2001, 2004 a, b; Bingham et al. 1999; Bingham et al. 2000; Liao and Jagacinski 2000; Mechsner et al. 2001; Schmidt et al. 1990; Serrien et al. 2001; Wilson and Bingham 2005 a, b; Wilson et al. 2003; Wimmers et al. 1992). Indeed, Bingham (2001, 2004a,b) has attributed the characteristic stable modes of bimanual rhythmic movement to perceptual information variables hypothesized to couple such movements (see also Wilson and Bingham 2005 a, b).
The study of rhythmic movement is informative but it is also important to study how people move the two limbs together when carrying out a wide range of everyday ‘discrete’ bimanual tasks. Kelso et al. (1979 a, b) and Diedrichsen et al. (2001) both studied bimanual reaching (‘aiming’) movements and found that the left and right limbs interacted and showed synchronous timing. We wished to investigate as to whether the two limbs interact in the same way when bimanual reach-to-grasp movements are made to two spatially separate target objects. The work of Kelso (1979 a, b) and others led us to expect that the two hands would start moving together (and end in reasonable temporal proximity) but we predicted asynchronous coordinative timing for two reasons. First, the timing of uni-manual reach-to-grasp movements varies reliably with the distance of the target as well as with its grasping surface area (i.e., reaches to targets that are more distant or smaller require a longer time to complete, e.g. Jeannerod 1984, 1988). Bimanual reaches to targets different in size and/or distance should thus be expected to yield asynchronous timing. The second reason we expected asynchronous timing is because precision prehension requires vision to guide reaches but it is not possible to fixate two objects simultaneously when objects are sufficiently separated. Asynchronous coordination would be expected to allow time to look from one object to the other while guiding the hands. We will consider these two reasons in some depth in the subsequent paragraphs.
Prehension exhibits regularities that should be expected to introduce asymmetries in the context of bimanual coordination. The pattern of behaviour observed in unimanual prehension experiments is highly stereotypical across and within participants (Haggard and Wing 1995; Paulignan et al. 1991; Jackson et al. 1997). If a precision grip (Napier 1956) is used, as the hand starts forward, the thumb and finger move apart to form a maximum grip aperture that is scaled relative to the size of the target object (e.g. Jeannerod 1984, 1988; Smeets and Brenner 1999). The hand accelerates to a peak speed and then decelerates as the hand approaches the target. The movement of the hand exhibits a smooth ‘bell-shaped’ speed profile with a relatively longer deceleration phase. The maximum grip aperture occurs during the deceleration phase when closing of the aperture is initiated (Jeannerod 1984, 1988; Smeets and Brenner 1999; Mon-Williams and Tresilian 2001). The reach movement ends at the object with the thumb and finger closing to finally contact and acquire the target object (Wing and Fraser 1983). A larger target distance yields a larger peak speed, but not large enough to prevent longer movement durations (i.e. movement duration increases with reach distance). Increasing the accuracy demands of the task by decreasing the grip surface size also produces longer duration movements. A smaller sized target at a given distance will yield a slower movement (e.g. Bootsma et al. 1994; Tresilian and Stelmach 1997; Tresilian et al. 1997; Mon-Williams and Tresilian 2001). Likewise, the grasp component shows stereotypical patterns of behaviour. The maximum grip aperture is sensitive to the size of the object so that the aperture is a little wider than the width of the target object and occurs later in the movement for larger objects (Jeannerod 1984, 1988; Smeets and Brenner 1999; Mon-Williams and Tresilian 2001). It can be seen that synchronous prehensile coordination to targets of different sizes and at different distances would entail changes in the regular patterns of prehension.
Nevertheless, even if bimanual prehension were performed to separate targets of equal distance and size, we would expect to find evidence of asynchronous behaviour. The reason is that targeted prehension requires visual guidance for accurate performance (Fisk and Goodale 1988). This is why prehension movements to targets with a smaller grip area have a longer duration. That is, prehension movements require online correction of errors under visual guidance and thus exhibit the speed-accuracy trade-off typical of visually guided actions (e.g. Bootsma et al. 1994; Fitts 1954; Wing et al. 1986). In bimanual reaching-to-grasp, the two targets cannot be fixated at the same time when they are spatially separate (see Riek et al. 2003). Accurate performance under these conditions requires a sequential organisation that allows the two targets to be fixated in turn to guide the corresponding prehension. Indeed, Riek et al. (2003) found ‘hovering’ behaviour in bimanual targeted reaching (aiming) movements where one hand would hover and wait while the other hand was targeted (in that study, targets were contacted by a probe and not grasped). It follows that any noise in the execution of the organised sequence will result in asynchronous coordination—and noise is an intrinsic feature of such actions (hence the need for visually guided corrections in the first place).
In the current study, we investigated the organisation and timing of bimanual reaching-to-grasp. First, we were interested in investigating reaches to targets at identical distances. This condition was predicted to yield the same arrival times for the two hands. Nevertheless, we expected to see asynchrony reflecting the demands of visually guiding two hands in the final stages of the movements. All else being equal, we could not predict which hand would close first in asynchronous trials. We also manipulated the difficulty of the task. With greater difficulty, we expected to see greater asynchrony. We varied the difficulty of targeting in two ways. We varied the grip area available for contacting the object on its sides with finger and thumb (1, 2, and 3 cm). Smaller grip area is more difficult (in Fitts’ 1954 sense of requiring more visually guided corrections). We also varied the frontoparallel width of the targets (3, 5, and 7 cm). Wider targets present a larger collision hazard (Meulenbroek et al. 2001; Rosenbaum et al. 1999) and thus are more difficult. With two targets of unequal difficulty, it was unclear as to whether one should predict closure on the more or less difficult target first. So, while we looked for ordering effects, we only predicted increasing asynchrony.
Second, we investigated reaches to targets at different distances. This condition was predicted to yield different arrival times for the two hands. Nevertheless, should we expect to see synchronous arrival reflecting the tendency in bimanual coordination for synchrony? We manipulated the target distance for the left hand (20, 30, and 40 cm) while the distance of the target for the right hand remained constant at the middle distance (30 cm). When the variable target was either closer or farther than the constant target then independent reaching behaviour should naturally introduce asynchrony in arrival times. The question was whether this asynchrony would occur, and then be maintained during closure. If so, then the order in which grasping was achieved between the hands should vary as a function of the relative target distances (i.e. the nearer target should be grasped first). We also manipulated the difficulty of grasping at different distances so that distance would interact with grip area and object width to determine difficulty. Once more, we expected greater asynchrony when the difficulty of grasping was greater.
The design of the study was such that one hand (called the “constant hand”) always reached to the same target object. The other hand (called the “variable hand”) reached to targets that varied in width, grip surface area and distance. We studied timing measures of the constant hand in terms of the levels of object width, grip surface area, and distance encountered by the variable hand. Variations in the timing of the constant hand would indicate that its behaviour was affected by the action of the variable hand (i.e. that there were interactions between the hands). The question then would be as to whether the interactions (1) would yield synchronous timing when targets were at different distances or (2) would yield asynchronous timing when the targets were at the same distances?
Methods
Eight unpaid participants from the University of Aberdeen were recruited for the study (five females and three males aged between 20 and 30 years, mean age 24 years). An additional ten unpaid volunteers participated in a control experiment (eight females and two males aged between 21 and 26 years). All participants had normal or corrected to normal vision and none had any history of neurological deficit. The participants all reported a right hand preference and all wrote and threw a ball with their right hand. All participants provided their informed consent prior to their inclusion in the study. The study was approved by a university ethics committee and was performed in accordance with the ethical standards laid down in the Declaration of Helsinki.
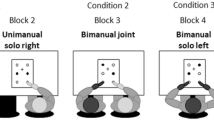
The experimental task required the participants to sit at a table and reach for two objects (dimensions of objects: length 9.5 cm; height 3.2 cm; width: varying sizes). Two separate starting positions were located 10 cm from the edge of the table closest to the participant. The starting positions were 45 cm apart equally spaced to the left and right of the participants’ midline. Participants started each trial with the left hand on the left-side starting position and the right hand on the right-side starting position. In the constant (right) hand workspace an object was placed along the sagittal plane at 30 cm from the starting position. The block, with a width of 5 cm and with a grip surface of 2 cm diameter, remained in this position for the entire session (Fig. 1). In the variable (left) hand workspace, the target object varied in distance, width and grip surface area. Three object amplitudes were used: 20, 30, or 40 cm from the starting position along the sagittal plane. Nine objects were used. They were composed by crossing three object widths: 3, 5, and 7 cm and three grip surface sizes: 1, 2 or 3 cm diameter. Each target consisted of a block of wood with a wooden dowel fixed in it so that the ends of the dowel extended to either side of the block by 2 cm (like buttons). See Fig. 1. The dowel was to be held pinched between finger and thumb each in contact with an end of the dowel. The block held the dowel suspended about 2 cm above a table surface. We varied the width of target objects by altering the width of the block in which the dowel was inserted. Altering the diameter of the dowel varied the grip surface area. To be clear, the width determined the distance by which the tips of the index finger and thumb were separated whilst holding the object in the grip. The grip surface area was the size of each of the surfaces contacted by the thumb and fingertip, respectively.

Schematic showing layout of the experiment. The right hand reached to grasp an object of constant width and grasp surface at a fixed distance. The left hand reached to grasp objects of three different widths and three different grasp surfaces at one of three different distances
Participants performed ten test trials in each of the 27 different conditions (9 objects × 3 distances) but first participants performed ten practice trials in which the left and right amplitudes and objects were the same. Following this, the 270 test trials were completed with the trial order randomised across and between the participants. The entire session, including practice trials, lasted ∼1 h. Participants were informed that they should grasp the objects as quickly and accurately as possible between the pads of the forefinger and thumb and that they should not lift the object off the table.
In the control condition, the variable hand reached to all three distances but only the medium width block was used and only the narrow and wide grasp surface. This gave a total of six conditions with participants reaching eight times (randomised order) in each condition (total = 48 trials). In the control condition, two IREDs were attached securely to a head-mounted frame that allowed us to track head position. The signal was calibrated by asking participants to alter fixation between points on the tabletop by moving their head. We decided to use head movement to monitor fixation as previous research has shown that gaze shifts are implemented by changes in head position when angular separation exceeds 20° (Stahl 1999) as was the case in the current experimental setup.
The acquisition of data was initiated approximately one second before the experimenter’s verbal start command. The objects were visible to the participants when the “go” signal was given. Infra red emitting diodes (IREDs) were attached to the index finger (distal medial corner of the finger) thumb (distal lateral corner of the thumb) and the styloid process of the wrist for each reaching hand. The positions of the IREDs were recorded by an Optotrak movement recording system, factory precalibrated to a static positional resolution of better than 0.2 mm at 250 Hz. The data were collected for 3 s at 100 Hz and stored for subsequent offline analysis and filtered using a dual-pass Butterworth second-order filter with a cut-off frequency of 16 Hz (equivalent to a fourth-order zero phase lag filter of 10 Hz). The distance between the thumb and index finger IREDs was then computed (the aperture). Following this operation, the tangential speed of the wrist IRED and the aperture was computed and the onset and offset of the movement were estimated using a standard algorithm (threshold for movement onset and offset was 5 cm/s). Custom analysis routines were used to compute the dependent variables of interest in this study.
The majority of hand movements were found to consist naturally of two components: (1) an initial component (IC) during which the wrist reached towards the target while forming an appropriate grip aperture, stopping with the fingers surrounding (but not touching) the target object; (2) a completion component (CC) during which the finger and thumb closed on the target. That is, when the wrist had stopped (ending the reach), the grasp remained to be completed, that is, the fingers were not yet in contact with the target object. A final movement of the fingers closed the grasp with fingers in contact with the target object surfaces. The two components were easily identified when the kinematic profiles were plotted for each trial (see Fig. 2). We quantified these different components and reported the statistics conducted on these data.

Example of the kinematic profiles found in the experiment (scaled and offset) selected at random. The bottom two signals are the wrist speed profiles. The top two signals show the formation of the grip aperture. The constant hand’s signals are beneath the variable hand’s signals (so the dashed and dotted signals belong to the constant hand). The solid vertical line shows the cessation of the constant hand’s wrist movement. The dotted vertical line shows when the constant hand secured the object. The dashed vertical line showed when the variable hand contacted the object
The criterion for onset of a reach was wrist speed exceeding 5 cm/s. The criterion for termination of a reach, marking the end of the IC (see below), was wrist speed falling below 5 cm/s. The criterion for termination of the grasp closure and thus, of the CC and of the entire reach-to-grasp movement was when finger speed dropped below 5 cm/s. We measured and analysed nine different dependent variables:
-
1.
Onset Asynchrony (OA): the time between the onset of the two hands (i.e., the difference in when each of the two hands started moving).
-
2.
Total Task Time (TTT): the total reach-to-grasp time, defined as the time taken from the reach onset until the time at which both hands had secured a grasp, that is, grasp termination.
-
3.
Peak Speed: peak speed reached by the constant (PSc) and variable (PSv) hand’s wrist.
-
4.
Time to Peak Speed: time to peak speed for the constant (TPSc) and variable (TPSv) hand’s wrist.
-
5.
Normalised Time to Peak Speed: time to peak speed normalised by Initial Component Duration (see 7 below) for the constant (NTPSc) and variable (NTPSv) hand’s wrist.
-
6.
Maximum Grip Aperture: the largest distance occurring between the index finger and thumb tips during the reach for the constant (MGAc) and variable (MGAv) hand.
-
7.
Initial Component Duration: the times from reach onset (when the hand started moving) to reach termination (when the wrist stopped moving) for the constant (ICDc) and variable (ICDv) hand.
-
8.
Initial Component Asynchrony (ICA): the difference between the reach termination times (when each wrist stopped moving) of the constant and variable hands (we computed and analysed signed differences).
-
9.
Grasp Termination Asynchrony (GTA): the difference between when a grasp was achieved (i.e., when the fingers stopped moving) by the constant hand and when it was achieved by the variable hand (we computed and analysed signed differences).
We used the median value for the ten trials for each condition for each participant within our analyses for each dependent variable. We selected the median as standard practice as it is robust to outliers; mean values produced the same pattern of results. We examined each of these measures in two ways. First, each was studied for evidence of deviations from the characteristic form of unimanual reach-to-grasp movements as determined by the target object properties: distance, grip area size, and width. That is, we looked for the appearance of interactions between the hands causing them to be more synchronous as the reach-to-grasp evolved through time. Second, each measure was examined to see if asynchrony was present, especially in the final stages when the grasp is actually established. On the one hand, a tendency towards synchrony was expected given the results of the previous studies of bimanual coordination described above. On the other hand, we also expected asynchrony near the end of the movements as an unavoidable consequence of vision being directed towards one hand and then the other (with necessary corrections then made under visual guidance).
Results
Control experiment
The data from all ten participants on all 48 trials were inspected by eye and analysed using Labview routines. The pattern of hand movements was consistent with the findings reported for the main experiment. The control experiment was conducted to explore the changes in fixation that occur during the experimental task. It was found that every participant shifted fixation from one target to the other after movement onset, on every trial. Fixation shifted on average at 267 ms into the movement across the participants (30.6% of movement duration on average). This result confirms previous suggestions that large angular gaze shifts are generated through head movements (Stahl 1999). Moreover, this result shows that task success rested upon fixation of both reaching limbs as they approached the target. The mode of the number of head movements was one, with the normal pattern consistent with the participant fixating the constant target and then shifting gaze to the variable hand’s target. Trials where the participant started with fixation on the variable target generally occurred when the variable target was at the close distance. The trials with more than one head movement generally occurred with the smallest grip surface.
Main experiment
All data were entered into a three way repeated measures ANOVA with Greenhouse–Geisser corrections using distance, width and grip surface area as the three independent variables. A separate ANOVA was conducted for each of the eight dependant variables. For variables that entailed a separate measure for each hand, separate ANOVAs were conducted on the data for each hand or we did a four factor ANOVA with hand as a fourth factor. In the majority of situations there were no reliable interactions in which case we report only the statistically reliable main effects. The uncorrected degrees of freedom are (2, 14) for main effects and (4, 28) for two-way interactions, the corrected values are provided when we report the F scores.
Onset asynchrony
There was no reliable effect of distance, width or grip surface area on the onset asynchrony. The hands started their movement at approximately the same time (average 5 ms signed onset asynchrony, 14 ms unsigned asynchrony). We had expected no significant differences in this analysis.
Total task time
The ANOVA yielded a reliable effect of distance [F (1.05,7.35) = 10.17, P < 0.05] and grip surface area [F (1.79,712.53) = 17.09, P < 0.05]. TTT increased (1) as the average distance increased and (2) as the grip surface area decreased in size (Fig. 3).

Total task time (ms) was defined as the time between the first hand starting to move forward and the time at which both hands had secured a grasp on the target objects. The figure (a) shows that total task time increases as distance (cm) increases. The figure (b) shows that total task time increases as grasp surface size (cm) decreases. The lines shown are least-squares linear regressions
Peak speed, time to peak speed, and normalised time to peak speed
Distance, width or grip surface area (of the variable hand) affected neither the peak speed nor the time to peak speed of the constant hand. PS of the variable hand was affected reliably by distance alone [F (1.02,7.03) = 19.91, P < 0.05] as was the time to peak speed [F (1.06,7.42) = 19.03, P < 0.05]. These results can be seen in Fig. 4. There were no significant effects of distance, width or grip surface area on normalised time to peak speed for either the constant or variable hand. Peak speed occurred at about 40% of the total reach duration (mean = 44.2%) as typically found in prehension studies.

Peak tangential speed (mm/s) plotted against distance in cm (upper, a) and time to peak tangential speed (ms) plotted against distance in cm (lower, b). The peak speed and the time to peak speed of the variable hand were affected by average distance. The target of the variable hand did not affect the peak speed of the constant hand. The lines shown are least-squares linear regressions
The lack of interaction between the hands during the first part of the reach movements has been reported in previous studies on bimanual prehension that have analysed initial reaction times, in particular (Diedrichsen et al. 2001; Kunde and Weigelt 2005; see Ivry et al. 2004 for review and discussion). This lack of interaction means that at least up to the moment of peak speed, reaches to equivalent objects at the same distances were approximately synchronous while reaches to objects at different distances were asynchronous.
Maximum grip aperture
The maximum grip aperture of the variable hand was influenced by object width [F (1.05,7.34) = 52.47, P < 0.05] and grip surface area [F (1.31,9.13) = 22.37, P < 0.05]. Notably, MGA of the constant hand was also influenced by (variable hand) object width [F (1.18,8.23) = 13.45, P < 0.05]. This was the first sign of any interaction between the hands and, given that MGA occurred at about 70% of the reach duration, it took place during the deceleration phase of the reaches. These results can be seen in Fig. 5.

Maximum grip aperture (cm) of both the constant and variable hand plotted against object width in cm (upper, a) and against grip surface in cm (lower, b) for the variable hand. The influence of the variable hand target’s width on the maximum grip aperture of the constant hand was the first sign of any interaction between the hands. The lines shown are least-squares linear regressions
Initial component duration
We performed a four factor repeated measures ANOVA on the time at which the wrist stopped moving (at the end of the IC) with hand, distance, width, and grip surface area as factors. Main effects were obtained for hand [F (1,7) = 6.37, P < 0.05], distance [F (1.08,7.54) = 14.57, P < 0.01], and grip surface area [F (1.08,7.53) = 7.73, P < 0.05]. The constant hand was faster than the variable hand (constant = 651 ms; variable = 680 ms). Smaller grip surface area yielded slower reaches as shown in Fig. 6b. Distance and width both exhibited interactions with hand: distance by hand [F (1.22,8.52) = 7.98, P < 0.05], and width by hand [F (1.22,8.54) = 5.25, P < 0.05]. Given these interactions, we performed a separate three-factor ANOVA on the data for each hand. The time at which the wrist stopped moving was affected reliably by distance (of the variable hand target) for both the constant [F (1.75,12.26) = 14.51, P < 0.05] and variable hand [F (1.09,7.62) = 11.99, P < 0.05]. Likewise, the time at which the hand stopped moving was affected reliably by grip surface area for both the constant [F (1.09,7.64) = 4.15, P < 0.05] and variable hand [F (1.15,8.06) = 12.37, P < 0.05]. These results can be seen in Fig. 6. The effect of distance and grasp surface size on the timing of the constant hand was the second result showing interaction between the hands.

The initial component duration (ms) for the constant and variable hand plotted against distance in cm (upper, a) and against grasp surface size in cm (lower, b). The effect of distance and grasp surface size on the timing of the constant hand was the second result showing interaction between the hands. The lines shown are least-squares linear regressions
The changes in constant hand timing were not nearly large enough to yield synchronous movements as can be seen in Fig. 6. The asynchrony of timing was shown by the statistically significant interaction of hand with both distance and grip surface area in the four-factor ANOVA. The main effect found for the hand in the four-factor ANOVA revealed that when all else was equal, the constant hand would arrive first. In the context of the relative phase measure used in rhythmic bimanual coordination studies, this ≈80 ms asynchrony in movements of ≈640 ms duration represented a phase difference of about 20°.
Initial component asynchrony
We next tested the asynchrony at the end of the IC directly. We calculated the difference between when the constant and variable wrist stopped moving (the end of the IC) in each trial. The temporal difference between the two hands was affected reliably by distance [F (1.05,7.34) = 18.22, P < 0.05] and object width [F (1.62,11.36) = 5.56, P < 0.05] as shown in Fig. 7. (These were the factors that interacted with hand in the previous analysis.) Figure 7 shows that the order of the hands reversed as predicted (with the nearer target reached first and the further target reached last). An examination of the frequency histograms of these asynchronies at each distance revealed that for the 20 and 40 cm targets (i.e., different target distances for the two hands), about 90% of the data were in the direction represented by the means shown in Fig. 7 and the coefficients of variation (i.e., SD/mean) were about 1.0. In contrast, the mean asynchrony for the 30 cm distance (i.e., the equal distance condition) was small (≈−20 ms). Examination of the frequency histogram revealed that the data were distributed about both positive and negative asynchronies significantly different from zero, but with distributions that overlapped at zero. We computed mean (and SD) asynchronies for the positive (variable hand first) and negative (constant hand first) distributions as object width varied from small to large. See Table 1. In all cases, the mean absolute value of asynchrony, whether positive or negative, was about 76 ms with a coefficient of variation of about 86% (i.e. SDs were about 65 ms). Both positive and negative asynchronies varied with object width as shown by two-tailed t-tests, F(98) = 756.4, P < 0.01, and F(136) = 1458.4, P < 0.01, respectively. Thus, in the equal target distance condition, which hand arrived first appeared to vary randomly, but in about half of the trials the constant hand arrived first by about 76 ms on average, and in the other half, the variable hand arrived first by about the same amount of time.

The signed temporal difference (ms) between when the constant and variable hand stopped moving plotted against distance in cm in the upper plot (a) and against object width (cm) in the lower plot (b). The lines shown are least-squares linear regressions. It can be seen that the order of the hands reversed according to target distance (with the nearer target reached first by the variable hand and the further target reached last)
Grasp termination asynchrony
We calculated the temporal differences between when the constant hand and variable hand achieved a final grasp for each individual trial and analysed these data. A reliable interaction was found between the GTA and both reach distance and grip surface area [F (2.81,19.64) = 4.03, P < 0.05]. There was also a main effect of object width on GTA [F (1.73,12.71) = 8.15, P < 0.05]. The results shown in Fig. 8 are essentially the same as in Fig. 7, that is, the timing at the end of the IC was preserved through to the end of the entire reach-to-grasp movement.

The upper plot (a) shows the signed temporal differences (ms) between when the constant hand and variable hand achieved a stable grasp plotted against distance (cm) for the three different grasp surfaces. The lower plot (b) shows the temporal differences (ms) between when the constant hand and variable hand achieved a stable grasp plotted against object width (cm). The lines shown are least-squares linear regressions. The pattern of results is similar to that shown in Fig. 6 indicating that the timing at the end of the IC was preserved through to the end of the entire reach-to-grasp movement
Discussion
We investigated bimanual prehension to separate target objects that varied in distance and size. We did not explicitly instruct the participants to move their hands together but previous research (e.g. Diedrichsen et al. 2001; Kelso et al. 1979a,b; Kunde and Weigelt 2005) led us to predict that: (1) the participants would start to move the hands at the same time and (2) the hands would move in reasonable temporal proximity (i.e. the movement of the two hands would occur in a common time window). We observed this expected pattern in all participants. However, we also expected target distance and size to affect the reach-to-grasp in the usual ways, which is to say that reaches should take longer to targets that are more distant or smaller. As shown in Fig. 3, these expectations were met. Furthermore, the peak speeds and the times for acceleration to peak speed for each hand were strictly a function of the targets approached by each hand. Thus, the peak speed and the time to peak speed were constant for the constant hand and variable for the variable hand.
The central question was how would the two hands coordinate in the terminal phase of the bimanual reaches? Would the reaches-to-grasp be synchronous or asynchronous? On the one hand, previous studies of reaching (without grasping) have found relative synchrony throughout (e.g. Kelso 1979a,b). On the other hand, the task requirements for visual guidance led us to predict that asynchrony would be observed in the movements (e.g. Fisk and Goodale 1988; Winges et al. 2003). In fact, we did see a tendency for synchronisation between the hands during the deceleration portion of the reaches. The movement of one hand started to influence the movement of the other hand so the variable hand’s target began to influence the kinematics recorded for the constant hand. Variations in the width of the variable hand target affected the maximum grasp aperture of the constant hand. Furthermore, the deceleration phase of the constant hand was affected by the variable hand target as indexed by the mean times at the end of the reaches (i.e., the Initial Component Durations). The arrival of the constant right hand lengthened as variable hand’s target became further and its surface became smaller. The influence of grip surface area on maximum grasp aperture (MGA) was probably mediated by this effect. The maximum grip aperture of the variable hand altered in response to grasp surface size as well as to object width. A small grasp surface resulted in a decreased MGA whereas a large grasp surface resulted in an increased MGA. The changes in grasp aperture can be explained by the shorter deceleration phase found in both hands when moving to a larger grasp surface (a larger grasp surface decreases accuracy demands allowing the system to reduce feedback correction and thus produce faster movements). It is known that alterations in movement time produce reliable changes in grasp aperture formation (Wing et al. 1986; Smeets and Brenner 1999; Mon-Williams and Tresilian 2001; Loftus et al. 2004). Nonetheless, these interactions were not nearly enough to yield synchrony between the hands when they reached towards unequal target objects at different distances. Moreover, when the hands reached towards equivalent targets at equal distances, their arrival was asynchronous. There was some tendency for the constant hand to arrive sooner, but which hand arrived first was largely random. When the targets were different distances, then the order of arrival was determined by the relative proximity of the targets as predicted (with the closer target reached first). It should be noted that the precise pattern we observed might have altered if the non-preferred hand had been reaching for the constant target (with the asynchrony and interaction of the hands being either larger or smaller during a particular movement phase). Nevertheless, this study shows the generic constraints that affect bimanual reach-to-grasp behaviour.
In conclusion, differences in the distances of targets did yield asynchronies in reaching as expected from normal uni-manual behaviour. These asynchronies were used to determine the ordering of the hands in closing on the targets. Increasing the difficulty of the target increased the magnitude of the asynchrony. Furthermore, when the targets distances were equal, the hands still exhibited asynchronies in arrival times, but now the ordering of the hands was largely random. The asynchronies that accrued during the IC were preserved through the CC. The parsimonious explanation is that the asynchronies were driven by the need for visual information to guide each hand in turn. Riek et al.’s (2003) eye movement study suggests that these asymmetries reflect looking behaviours and the time taken to fixate and guide first one hand and then the other. Consistent with this conclusion, the control experiment showed that every participant shifted fixation at least once (sometimes more when task difficulty increased) on every trial. The normal fixation shift pattern was consistent with the participant fixating the constant target and then shifting gaze to the variable hand’s target. The strategy of fixating on the variable target last by the participants (as evidenced by the control experiment) coincides well with the finding of increasing asynchrony with increasing target difficulty. The effect of this did not appear until the stage at which visual feedback was actually being used to guide the reach (i.e. during deceleration). Until the deceleration phase, the two reaches did not interact and each followed a trajectory determined stably by the task and the distance of the given target.
In summary, this article has shown the lawful relationships that are present in bimanual prehension movements. The experimental task often produced a qualitatively different prehension pattern than that sometimes described in the past studies. This result shows the flexibility of the prehension pattern in response to task demands. We set out to determine whether the bias for synchronicity would determine the coordinative timing of bimanual prehension movements to separate objects. We found that the behaviour was biased towards synchrony but the need for visual information also influenced the coordinative timing, producing asynchrony in reliable ways.
References
Bingham GP (2001) A perceptually driven dynamical model of rhythmic limb movement and bimanual coordination. In: Proceedings of the 23rd annual conference of the cognitive science society, LEA Publishers, Hillsdale, NJ, pp 75–79
Bingham GP (2004a) Another timing variable composed of state variables: phase perception and phase driven oscillators. In: Hecht H, Savelsbergh GJP (eds) Theories of time-to-contact. MIT, Boston
Bingham GP (2004b) A perceptually driven dynamical model of bimanual rhythmic movement (and phase perception). Ecol Psychol 16:45–53
Bingham GP, Schmidt RC, Zaal FTJM (1999) Visual perception of relative phasing of human limb movements. Percept Psychophys 61:246–258
Bingham GP, Zaal FTJM, Shull JA, Collins D (2000) The effect of frequency on visual perception of relative phase and phase variability of two oscillating objects. Exp Brain Res 136:543–552
Bootsma RJ, Marteniuk RG, MacKenzie CL, Zaal FTJM (1994) the speed-accuracy trade-off in manual prehension: effects of movement amplitude, object size, and object width on kinematic characteristics. Exp Brain Res 98:535–541
Castiello U, Bennett KM, Stelmach GE (1993) The bilateral reach to grasp movement. Behav Brain Res 56:43–57
Diedrichsen J, Hazeltine E, Kennerley S, Ivry RB (2001) Moving to directly cued locations abolishes spatial interference during bimanual actions. Psychol Sci 12:493–498
Fisk JD, Goodale MA (1988) The effects of unilateral brain damage on visually guided reaching: hemispheric differences in the nature of the deficit. Exp Brain Res 72:425–435
Fitts PM (1954) The information capacity of the human motor system in controlling the amplitude of the movement. J Exp Psychol 47:381–391
Haggard P, Wing AM (1995) Coordinated responses following mechanical perturbation of the arm during prehension. Exp Brain Res 102:483–494
Ivry R, Diedrichsen J, Spencer R, Hazeltine E, Semjen A (2004) A cognitive neuroscience perspective on bimanual coordination and interference. In: Swinnen S, Duysens J (eds) Neuro-behavioral determinants of interlimb coordination. Kluwer, Boston, pp 259–295
Jackson GM, Jackson SR, Kritikos A (1999) Attention for action: coordinating bimanual reach-to-grasp movements. Br J Psychol 90:247–270
Jackson SR, Jones CA, Newport R, Pritchard C (1997) A kinematic analysis of goal-directed prehension movements executed under binocular, monocular and memory-guided viewing conditions. Vis Cogn 4:113–142
Jeannerod M (1984) The timing of matural prehension movements. J Mot Behav 16:235–254
Jeannerod M (1988) The neural and behavioural organisation of goal-directed movements. Oxford University Press, Oxford
Kelso JAS (1995) Dynamic patterns: the self-organisation of brain and behavior. MIT Press, Cambridge, MA
Kelso JS, Southard DL, Goodman D (1979a) On the nature of human interlimb coordination. Science 203:1029–1031
Kelso JS, Southard DL, Goodman D (1979b) On the coordination of two-handed movements. J Exp Psychol Hum Percept Perform 5:229–238
Kunde W, Weigelt M (2005) Goal-congruency in bimanual object manipulation. J Exp Psychol Hum Percept Perform 31:145–156
Liao M, Jagacinski RJ (2000) A dynamical systems approach to manual tracking performance. J Mot Behav 32:361–378
Loftus A, Goodale MG, Servos P, Mon-Williams M (2004) When two eyes are better than one in prehension: prehension, end-point variance and monocular viewing. Exp Brain Res 158:317–327
Mechsner F, Kerzel D, Knoblich G, Prinz W (2001) Perceptual basis of bimanual coordination. Nature 414:69–73
Meulenbroek RGJ, Rosenbaum DA, Jansen C, Vaughan J, Vogt S (2001) Multijoint grasping movements: simulated and observed effects of object location, object size, and initial aperture. Exp Brain Res 138:219–234
Mon-Williams M, Tresilian (2001) A simple rule of thumb for elegant prehension. Curr Biol 11:1058–1061
Napier JR (1956) The prehensile movements of the human hand. J Bone Joint Surg 38B:902–913
Paulignan Y, MacKenzie C, Marteniuk R, Jeannerod M (1991) Selective perturbation of visual input during prehension movements. 1. The effects of changing object position. Exp Brain Res 83:502–512
Riek S, Tresilian JR, Mon-Williams M, Coppard V, Carson RC (2003) Bimanual aiming and overt attention: one law for two hands. Exp Brain Res 153:59–75
Rosenbaum DA, Meulenbroek RGJ, Vaughan J, Jansen C (1999) Coordination of reaching and grasping by capitalizing on obstacle avoidance and other constraints. Exp Brain Res 128:92–100
Schmidt RC, Carello C, Turvey MT (1990) Phase transitions and critical fluctuations in the visual coordination of rhythmic movements between people. J Exp Psychol Hum Percept Perform 16:227–247
Serrien DJ, Li Y, Steyvers M, Debaere F, Swinnen SP (2001) Proprioceptive regulation of interlimb behavior: interference between passive movement and active coordination dynamics. Exp Brain Res 140:411–419
Smeets JBJ, Brenner E (1999) A new view on grasping. Motor Control 3:237–271
Stahl JS (1999) Amplitude of human head movements associated with horizontal saccades. Exp Brain Res 126:41–54
Tresilian JR, Stelmach GE (1997) Common organisation for unimanual and bimanual reach-to-grasp tasks. Exp Brain Res 115:283–299
Tresilian JR, Stelmach GE, Adler CH (1997) Stability of reach-to-grasp movement patterns in Parkinson’s disease. Brain 120:2093–2111
Wilson A, Bingham GP (2005a) Perceptual coupling in rhythmic movement coordination—stable perception leads to stable action. Exp Brain Res 164:517–528
Wilson A, Bingham GP (2005b) Human movement coordination implicates relative direction as the information for relative phase. Exp Brain Res 165:351–361
Wilson AD, Bingham GP, Craig JC (2003) Proprioceptive perception of phase variability. J Exp Psychol Hum Percept Perform 29:1179–1190
Wimmers RH, Beek PJ, van Wieringen PCW (1992) Phase transitions in rhythmic tracking movements: a case of unilateral coupling. Hum Mov Sci 11:217–226
Wing AM, Fraser C (1983) The contribution of the thumb to reaching movements. Q J Exp Psychol 35:297–309
Wing AM, Turton A, Fraser C (1986) Grasp size and accuracy of approach in reaching. J Mot Behav 3:245–260
Winges SA, Weber DJ, Santello M (2003) The role of vision on hand preshaping during reach to grasp. Exp Brain Res 152:489–498
Acknowledgment
We are grateful to Jennifer Leaper (Charles) and Silke Leifheit for conducting the control experiment and analysing the data. A grant to Mark Mon-Williams from Action Medical Research and Scottish Enterprise helped support this research work. The production of the manuscript was facilitated by an award from the Royal Society of Edinburgh/Lloyds TSB to Bingham and Mon-Williams.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Bingham, G.P., Hughes, K. & Mon-Williams, M. The coordination patterns observed when two hands reach-to-grasp separate objects. Exp Brain Res 184, 283–293 (2008). https://doi.org/10.1007/s00221-007-1107-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-007-1107-9