
Abstract
This paper studies the stability criterion and controller design for time-delay switched systems with input saturation. The main contributions of this paper are as follows: (1) Based on constructing the Lyapunov–Krasovskii functional (LKF) with the triple integral term and making full use of the delay lower bound information, the sufficient conditions for the exponential stability of the system are given. (2) A state feedback controller is designed for the input-saturated system. (3) The symmetric delay rate problem is considered to accurately define the derivative of LKF, which reduces the conservatism of the system. By reducing conservatism, that is, the time-delay upper bound is raised, allowing for a wider range of time-delay signals. Finally, the effectiveness of the proposed method is verified by the numerical examples.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In scientific and engineering fields, such as mechanical rotation, flight control systems, and high-tech fields, time delay often occurs, which in most cases causes the degradation of the system performance and even destabilizes the system. In recent decades, the time-delay system stability has been extensively studied and has attracted a lot of attentions from the researchers [1, 4, 20, 31]. Additionally, switched system is one of the current research hotspots. In Cai et al. [2], the model-based event-triggered control for uncertain discrete-time switched systems composed of stable and unstable subsystems was studied. In Zhang et al. [32], a low-cost adaptive pre-designed time tracking control strategy was proposed for nonlinear switched systems with input quantization and unknown inter-class hysteresis delay. In Swapnil and Nikita [16], the dynamics of a bimodal planar linear switched system with Hurwitz stable and unstable subsystems was studied. In the current study, the switched non-time-delay systems or time-delay non-switched systems are relatively simple, while the switched systems with time delay are more complicated [21]. It is very important to find the maximum bound of time delay to ensure the asymptotic stability of the system. The study on the time-delay switched systems has attracted great interest [3, 8, 9, 11, 29, 33].
On the other hand, due to the physical limitations of the engineering equipment in the actual system, the input saturation occurs frequently. Therefore, it is great theoretical and practical importance to design the controller to make the system stable when the input saturation occurs [22]. In recent decades, there have been many research results on the switched systems with input saturation [12, 23, 24]. In Shang and Jingcheng [17], the adaptive event-triggered robust optimal control method for discrete-time switched systems with input saturation and external disturbances was studied. In Wu and Zhang [25], a non-fragile event-triggered control method for positive switched systems with/without input saturation was proposed. In Jiang et al. [7], an adaptive neural network control scheme for a class of randomly switched systems with input saturation was studied. In Wang et al. [26], the exponential stability of the switched systems with input saturation and parameter uncertainty was studied. In Marc and Sophie [13], the anti-windup control for the discrete-time switched systems with input saturation was studied.
Due to the inherent conservativeness of the Lyapunov–Krasovskii functional (LKF) method, the researchers have been trying to find ways to reduce the conservativeness of the stability criterion. In Gu [5], an approximation to the full LKF was achieved by decomposing the integration interval and restricting arbitrary matrix functions to sectional-continuous functions. In Peet and Papachristodoulou [14], the stability analysis was transformed into a sum-of-squares problem by parametrizing arbitrary matrix functions into higher-order polynomials and using polynomial relaxation techniques. In Seuret and Gouaisbaut [18], time-delay states were projected onto Legendre polynomials to achieve exact bounding of the cross terms. In Han [6] and Yue et al. [30], by decomposing the time-delay variation interval, the conservativeness of the corresponding linear matrix inequality (LMI) conditions can be reduced. The above stability analysis methods use the time-delay variation range and the upper bound on the rate of delay change. By using these two kinds of information and introducing the triple integral term into the design of LKF, the solution space will also be enlarged, which can further reduce the conservatism of the stability analysis.
In this paper, the stability criterion and controller design for the time-delay switched systems with input saturation is investigated based on an improved LKF. Based on constructing LKF with triple integral term and making full use of delay lower bound information, the sufficient conditions for exponential stability of the system are given. A state feedback controller is designed for the input-saturated switched system. The symmetric delay rate problem is considered to accurately define the derivative of LKF, which reduces the conservatism of the system. The inverse convex method is also introduced, which can directly deal with the integration of inversely weighted convex combinations to effectively reduce the number of decision variables and obtain a less conservative stability criterion. Finally, the effectiveness of the proposed method is verified by the numerical examples .
Notations We have used some standard symbols in this paper. \(\mathbb {R}^{m \times n}\) represents the \(m\times n\) dimensional real matrix, and \(\mathbb {R}^n\) represents the n-dimensional Euclidean space. Let \(Q=\{1,2,...,2^m\}\). \(M^\textrm{T}\) and \(M^\mathrm{-1}\) show the transpose and inverse of the matrix M, respectively. \(I_n\) represents the n-dimensional identity matrix. \(M>0\) and \(M<0\) represent the positive definite and negative definite symmetric matrices, respectively. \(\dot{x}(t)\) is the derivative of the function x(t) with respect to time t. \({\lambda _{\max }}(\cdot )\) and \({\lambda _{\min }}(\cdot )\) denote the matrix minimum and maximum eigenvalues, respectively, and \(*\) denotes the symmetric terms in a symmetric matrix.
2 Problem Formulation
Consider the following time-delay switched system with input saturation:
where \(x(t) \in {\mathbb {R}^n}\) is the system state, \(u(t) \in {\mathbb {R}^m}\) is the system input, and \( \varphi (\theta )\) is a continuous initial function. \(\sigma (k):[0,\ \infty ) \rightarrow \mathbb {M} = \{ 1,\ 2,\ \ldots ,\ M\} \) denotes the switched signal, M denotes the modal number. And
with \( - 1 \le \mathrm{{sat}}({u_i}(t)) \le 1\). \({A_\sigma }\), \({B_\sigma }\) and \({C_\sigma }\) are constant matrices with appropriate dimensions. The time-varying delay d(t) satisfies
where \( h_1,\ h_2\) and \(d_{\max }\) are the positive constants.
Lemma 1
[19] (Jensen’s integral inequality) Let x be a differentiable derivative on \([\alpha ,\ \beta ] \rightarrow {\mathbb {R}^n}\). For a positive definite matrix \(R \in {\mathbb {R}^{m \times n}}\), the following inequalities hold
where \( \alpha \) and \(\beta \) are the positive constants.
Lemma 2
[15] Let \({f_{1}},\ {f_{2 }},\ \ldots ,\ {f_N}: {R^m} \mapsto R\) have the positive values in an open subset D of \({R^m}\), and then, the \({f_i}\) mutually convex combination on D satisfies
then
Remark 1
Lemma 2 is the inverse convex method, which can directly deal with the integration of inversely weighted convex combinations to effectively reduce the number of decision variables.
Lemma 3
[34] There are \(2^m\) diagonal matrices \(D_i\in \mathbb {R}^{m \times m}\) with elements 1 or 0, \(j \in Q\), and \(D_j^ -=I-D_j\). The scalars \(\eta _j\) satisfy \(0 \le \eta _j \le 1\) and \(\sum _{i=1}^{2^m} \eta _j =1\), and it can be concluded that
And a bounded set is defined as
where \(h_s^\textrm{T}\) is the s-th row of \(H \in \mathbb {R}^{m \times n}\). For \( x(t) \in \mathbb {R}^n,\ K \in \mathbb {R}^{m \times n}\), if \(x(t) \in \mathcal {L}(H)\), then
where \(\textrm{co}\{\cdot \}\) denotes the convex hull.
Definition 1
[27] If there exist positive constants c and \(\lambda \) such that for any initial condition x(0), the solution of the system satisfies
and then the system is said to be exponentially stable with the exponential decay rate \(\lambda \).
Problem 1
Consider system (1) with \(u = 0\), a novel LKF is designed for the time-delay switched system. A less conservative stability criterion is obtained; that is, the time-delay upper bound is raised.
Problem 2
Consider system (1), a novel LKF is designed for the time-delay switched system with input saturation. A less conservative stability criterion is obtained; that is, the time-delay upper bound is raised. A state feedback controller is designed to ensure the exponential stability of the closed-loop system.
3 Main Results
Firstly, the stability of system (1) with \(u = 0\) is discussed and sufficient conditions for the exponential stability of the system are given.
Theorem 1
For given constants \({h_1}> 0,\;{h_2}> 0,\;\alpha> 0,\;\mu > 1\), if there exist matrices \({P_i}> 0,\;{R_{ji}}> 0,\;{D_{ji}}> 0,\;{Q_{ji}}> 0,\;{S_{ji}}> 0,\;{Z_i} > 0\) of appropriate dimensions satisfying
And the average dwell time \(\tau _a\) satisfies
where
Then, the system (1) with u = 0 is exponentially stable.
Proof
We choose the following LKF
where
and
where
and
Then, it can be derived
To make the stability criterion less conservative, Lemmas 1 and 2 are used to deal with the integral term,
In the same way,
For the double integral, using Lemma 1, we can obtain
By the above derivation, it can be concluded that
Then, it can be derived
where
When \({\Omega _i} < 0\), we have \({\dot{V}_i}(t) + 2\alpha {V_i}(t) < 0\) which means
where \(t_k\) denotes the switched time, \({t_0}< {t_1}< {t_2}< \cdots {t_k}< {t_{k + 1}} < \cdots \).
According to condition (4), we can obtain
where \(t_{{k^ - }}\) denotes the left limit of \(t_k\).
Let \(k = {N_{\sigma ({t_0},t)}} \le t - {t_0}/{T_\alpha }\), we have
According to Definition 1, we can obtain
Therefore, the system (1) with \(u = 0\) is exponentially stable. \(\square \)
Design the state feedback controller \(u(t) = {K_\sigma }x(t)\), where \({K_\sigma }\) denotes the gain of the controller. According to Lemma 3, it follows that
Then, the following closed-loop system can be obtained
Now, we give the sufficient conditions for the exponential stability of the time-delay switched system (21) as follows
Theorem 2
For given constants \({h_1}> 0,\;{h_2}> 0,\;\alpha> 0,\;\mu > 1\), if there exist matrices \({P_i}> 0,\;{R_{ji}}> 0,\;{\tilde{R}_{2i}}> 0,\;{D_{ji}}> 0,\;{Q_{ji}}> 0,\;{S_{ji}}> 0,\;{Z_i} > 0\) of appropriate dimensions satisfying
And the average dwell time \(\tau _a\) satisfies
where
Then, the closed-loop system (21) is exponentially stable.
Proof
We choose the following LKF
where
and
The derivative of (27)–(32) is
where
and
Then, it can be derived
To make the stability criterion less conservative, Lemmas 1 and 2 are used to deal with the integral term,
In the same way, we have
For the double integral, using Lemma 1, we can obtain
By the above derivation, it can be concluded that
Then, it can be derived
where
Using the Schur complement lemma, \( {\Omega '_i} < 0 \) equals
where
For convenience, let
Then, left multiplying and right multiplying inequality (41) by \(\textrm{diag }\{X_i,\ X_i,\ X_i,\ X_i,\ X_i, \ X_i, \ X_i,\ X_i\}\), we can obtain
Consider (24)–(25), the inequality (22) is equivalent to inequality (42). When \({\bar{\Omega }_i} < 0\), we have \({\dot{V}_i}(t) + 2\alpha {V_i}(t) < 0\) which means
where \(t_k\) denotes the switched time, \({t_0}< {t_1}< {t_2}< \cdots {t_k}< {t_{k + 1}} < \cdots \).
According to condition (26), we can obtain
where \(t_{{k^ - }}\) denotes the left limit of \(t_k\).
Let \(k = {N_{\sigma ({t_0},\ t)}} \le t - {t_0}/{T_\alpha }\), we have
According to Definition 1, we can obtain
Therefore, the above closed-loop system (21) is exponentially stable. \(\square \)
Remark 2
Comparing with the existed results, our methods focused on utilizing time-delay information. In the design of LKF, it takes into account both the lower bound information and the rate of change of the time delay, aiming to reduce conservatism. By reducing conservatism, that is, the time-delay upper bound is raised, allowing for a wider range of time-delay signals.
4 Numerical Simulation
Consider system (1) with the following parameters
Choose \(d_{\max } = 0.5\) and apply Theorem 2, we can calculate
Then, we can obtain

Switched signal

Time-delay signal

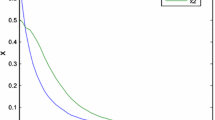
System state with \(d_{\max }=0.5\) and \(h_2=2.300\)

System state with \(d_{\max }=0.1\) and \(h_2=3.870\)

System state with \(d_{\max }=0.9\) and \(h_2=1.990\)

Control input
It can be seen from Table 1 that the larger value of \(d_{\max }\) is, the larger the upper bound of the time-delay increases by introducing the triple integral term.
The initial value is \({x_0} = \left[ {\begin{array}{*{20}{c}} 2&{ - 2} \end{array}} \right] ^\textrm{T}\). The simulation results are as follows. The switched signal \(\sigma (t)\) of the system is shown in Fig. 1. The time-delay signal of the system is shown in Fig. 2. Figure 3 shows the system state with \(d_{\max }=0.5\), and we can see that the closed-loop system is stable. Figures 4 and 5 show the system state with \(d_{\max }=0.1\) and \(d_{\max }=0.9\), and we can see that the closed-loop system is stable. Figure 6 represents the control input, and we can see that the control input is not saturated.
5 Conclusion
In this paper, the stability criterion and controller design for the time-delay switched systems with input saturation are investigated based on an improved LKF. Based on constructing LKF with triple integral term and making full use of the delay lower bound information, the sufficient conditions for the exponential stability of the system are given. A state feedback controller is designed for the input-saturated switched system. The symmetric delay rate problem is considered to accurately define the derivative of LKF, which reduces the conservatism of the system. Finally, the effectiveness of the method is verified by the numerical examples. In future work, we will study the stability analysis for switched system with random saturation and actuator failure.
Data Availability
Data sharing is not applicable to this article as no data sets were generated or analyzed during the current study.
References
J.D. Aviles, J.A. Moreno, F.J. Bejarano, Dissipative state observer design for nonlinear time-delay systems. J. Franklin Inst. 360(2), 887–909 (2023)
L.H. Cai, B. Lu, T.F. Li, Model-based event-triggered control of switched discrete-time systems. J. Franklin Inst. 360(14), 10499–10516 (2023)
X.Y. Chen, Y. Liu, B.X. Jiang, J.Q. Lu, Exponential stability of nonlinear switched systems with hybrid delayed impulses. Int. J. Robust Nonlinear Control 33(5), 2971–2985 (2022)
X.Y. Gao, K.L. Teo, H.F. Yang, S. Cong, Exponential stability of integral time-varying delay system. Int. J. Control 95(12), 3427–3436 (2022)
K. Gu, Discretization schemes for Lyapunov–Krasovskii functionals in time-delay systems. Kybernetika 37(4), 479–504 (2001)
Q.L. Han, A discrete delay decomposition approach to stability of linear retarded and neutral systems. Automatica 45(2), 517–524 (2009)
X.L. Jiang, M.Y. Liu, S.Q. Liu, J. Xu, L.N. Liu, Adaptive neural network control scheme of switched systems with input saturation. Discret. Dyn. Nat. Soc. 2020, 7259613 (2020)
W.Z. Li, B.W. Wu, Y.E. Wang, L.L. Liu, Static output feedback H\(\infty \) control for switched LPV time-delay systems with nonlinear constraints. Trans. Inst. Meas. Control. 45(5), 963–974 (2023)
X.H. Li, Z.H. Liu, L.J. Gao, Z.Y. Wang, Integral input-to-state stability of switched delayed systems with delay-dependent impulses under generalized impulsive and switched scheme. Trans. Inst. Meas. Control. 45(5), 853–873 (2023)
Y.Z. Liu, Y.J. Yin, Robust exponential stability for switched systems with interval time-varying delay. 32nd Conference on Control and Decision-making in China. Hefei, China, 032989 (2020)
Y.B. Mao, O. Ou, H.B. Zhang, L.L. Zhang, Robust H\(\infty \) control of a class of switched nonlinear systems with time-varying delay via T-S fuzzy model. Circuits Syst. Signal Process 33(5), 1411–1437 (2014)
P.A. Mohammad, Finite time control of a class of nonlinear switched systems in spite of unknown parameters and input saturation. Nonlinear Anal. Hybrid Syst 31, 220–232 (2019)
J. Marc, T. Sophie, Anti-windup strategies for discrete-time switched systems subject to input saturation. Int. J. Control 9(5), 919–937 (2016)
M. Peet, A. Papachristodoulou, Positive forms and stability of linear time-delay systems. SIAM J. Control. Optim. 47(6), 3237–3258 (2009)
P.G. Park, J.W. Ko, C.K. Jeong, Reciprocally convex approach to stability of systems with time-varying delays. Automatica 47(1), 235–238 (2011)
T. Swapnil, A. Nikita, Stability of bimodal planar switched linear systems with both stable and unstable subsystems. Int. J. Syst. Sci. 53(15), 3254–3285 (2022)
W.Z. Shang, W. Jingcheng, Robust optimal control for constrained uncertain switched systems subjected to input saturation: the adaptive event-triggered case. Nonlinear Dyn. 110(1), 363–380 (2022)
A. Seuret, F. Gouaisbaut, Hierarchy of LMI conditions for the stability analysis of time-delay systems. Syst. Control Lett. 81, 1–7 (2015)
Y. Sun, L. Wang, G. Xie, Stabilization of switched linear systems with multiple time-varying delays. IEEE Conf. Decis. Control 45, 4069–4074 (2006)
C.T. Tinh, D.L. Thuy, P.T. Nam, H.M. Trinh, Componentwise state bounding of positive time-delay systems with disturbances bounded by a time-varying function. Int. J. Control 96(2), 332–338 (2023)
Y.E. Wang, D. Wu, H.R. Karimi, Robust stability of switched nonlinear systems with delay and sampling. Int. J. Robust Nonlinear Control 32(5), 2570–2584 (2021)
Q. Wang, Q.X. Lin, Controller design for input-saturated discrete-time switched systems with stochastic nonlinearity. Circuits Syst. Signal Process 42(6), 3341–3359 (2023)
J.L. Wang, X.Q. Zhang, Non-fragile robust stabilization of nonlinear uncertain switched systems with actuator saturation. J. Control Autom. Electr. Syst. 34(1), 18–28 (2022)
Q. Wang, Q.X. Lin, Y.T. Yang, Continuous dynamic gain scheduling control for input-saturated switched systems. Int. J. Syst. Sci. 53(1), 40–53 (2022)
Y. Wu, J. Zhang, Non-fragile event-triggered control of positive switched systems. Int. J. Syst. Control Inform. Process. 3(3), 173–192 (2021)
Q. Wang, Z.G. Wu, P. Shi, A.K. Xue, Robust control for switched systems subject to input saturation and parametric uncertainties. J. Franklin Inst. 354(16), 7266–7279 (2017)
Z.D. Wang, B. Shen, X.H. Liu, H-infinity filtering with randomly occurring sensor saturations and missing measurements. Automatica 48(3), 556–562 (2012)
L.M. Wang, C. Shao, X.Y. Liu, State feedback control for uncertain switched systems with interval time-varying delay. Asian J. Control 13(6), 1035–1042 (2011)
D. Xie, Y. Wu, X. Chen, Stabilization of discrete-time switched systems with input time-delay and its applications in networked control systems. Circuits Syst. Signal Process 28(4), 595–607 (2009)
D. Yue, E. Tian, Y. Zhang, A piecewise analysis method to stability analysis of linear continuous/discrete systems with time-varying delay. Int. J. Robust Nonlinear Control 19(13), 1493–1518 (2009)
C.X. Zhang, Q.X. Zhu, Exponential stability of random perturbation nonlinear delay systems with intermittent stochastic noise. J. Franklin Inst. 360(2), 792–812 (2023)
J. Zhang, Y.N. Pen, Q. Lu, Low-cost adaptive prescribed time tracking control for switched nonlinear systems. Int. J. Syst. Sci. 54(9), 1945–1960 (2023)
G.P. Zhang, Q.X. Zhu, Finite-time guaranteed cost control for uncertain delayed switched nonlinear stochastic systems. J. Franklin Inst. 359(16), 8802–8818 (2022)
B. Zhou, Truncated predictor feedback for time-delay systems (Springer, Berlin, Heidelberg, 2014)
Funding
This work is supported by the Zhejiang Provincial Natural Science Foundation of China [Grant Numbers: LY22F030002 and LY22E050003].
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wang, Q., Tian, F. & Chen, G. Stability Analysis of Time-Delay Switched System Based on Improved Lyapunov–Krasovskii Functionals. Circuits Syst Signal Process 43, 1473–1491 (2024). https://doi.org/10.1007/s00034-023-02557-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-023-02557-2