
Abstract
This paper considers H ∞ control of a class of switching nonlinear systems with time-varying delays via T–S fuzzy model based on piecewise fuzzy weighting-dependent Lyapunov–Krasovskii functionals (PFLKFs). The systems are switching among several nonlinear systems. The Takagi and Sugeno (T–S) fuzzy model is employed to approximate the sub-nonlinear dynamic systems. Thus, with two level functions, namely, crisp switching functions and local fuzzy weighting functions, we introduce a continuous-time switched fuzzy systems, which inherently contain the features of the switched hybrid systems and T–S fuzzy systems. Average dwell-time approach and PFLKFs methods are utilized for the stability analysis and controller design, and with free fuzzy weighting matrix scheme. Switching and control laws are obtained such that the H ∞ performance is satisfied. The conditions of stability and the control laws are given in the form of LMIs which can be obtained by solving a set of linear matrix inequalities (LMIs) that are numerically feasible. A numerical example and the control of an uncertain radio-controlled (R/C) hovercraft with time-varying delay are given to demonstrate the efficiency of the proposed method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Switching systems are an important class of hybrid systems. Such systems can be described by a family of continuous-time subsystems (or discrete-time subsystems) and a rule that orchestrates the switching between them; for example, a given process exhibits a switching behavior caused by abrupt changes of the environment. This class of systems has numerous applications in the control of mechanical systems, the automotive industry, aircraft and air traffic control, switching power converters and many other fields. Although this class of systems can be seen as a particular case of linear parameter varying (LPV) systems, it has specific characteristics: the first is that the switch occurs between a finite number of subsystems; the second is that the switching sequence has to be taken into account in practical situations. For instance, one can only act using a certain sequence to stabilize the switched system. This class system has received great interest from researchers during the last decade [1, 10, 14].
The stability problem, caused by various switching, is a main concern in the field of switching systems [10]. So far, two stability issues have been addressed in literature, i.e., the stability under arbitrary switching and the stability under constrained switching. The former case is mainly investigated based on constructing a common Lyapunov function for all subsystems [10]. On the other hand, for switching systems under constrained switching, it is well known that the multiple Lyapunov-like function approach is more efficient in offering greater freedom for demonstrating stability of the system [14]. As a class of typical constrained switching signals, the average dwell-time switching means that the number of switches in a finite interval is bounded and the average time between consecutive switching is not less than a constant [10] and [14]. The average dwell-time switching can cover the dwell-time switching and its extreme case is actually the arbitrary switching. Therefore, it is of practical and theoretical significance to probe the stability of switching systems with average dwell time [14].
In recent years, switching linear systems have received a great deal of attention in continuous-time domain [1, 14]. However, there is less research in the field of continuous-time switching nonlinear systems [17, 24]. Since the introduction of T–S fuzzy models by Takagi and Sugeno [15] in 1985, fuzzy model control has been extensively studied because T–S fuzzy models provide an effective representation of complex nonlinear systems [3, 4, 8, 9, 16, 18]. The objective of this paper is to study switching nonlinear systems [11] with time-varying delay. Each subsystem is written as an equivalent T–S fuzzy model. Recently, there has been several literature in the field of switching fuzzy system [2, 17, 24]. However, they do not consider the average dwell time in stability analysis which is important for switching systems.
Generally speaking, real systems with time delays are common in biology, mechanics, society, and economics. Moreover, time-varying delay is more important and universal in real engineering processes and has more complex impacts on system dynamics than constant delay. Since time delay is a main factor of instability of time-delay systems, the problem of stability analysis of time-delay systems has been one of the main concerns of researchers wishing to inspect the properties of such systems. Recently, the authors in [1] and [7, 20, 21, 25] considered switching linear systems with delays. As for switched nonlinear systems with delays we hope we can as get desirable result as switching linear systems such as exponential stability. Recently, there exist some advanced methods to deal with time delay in the T–S fuzzy systems [6, 13, 22, 23, 26], such as slack matrix, input-output method and delay partitioning method and fuzzy weighting-dependent Lyapunov–Krasovskii functionals to deal with asymptotically stability. Based on these results, we can construct PFLKFs for the exponential stability of switched fuzzy systems with delays. On the other hand, due to modeling error or external disturbance, many practical systems are always subject to various kinds of uncertainties. One of the most important requirements for a control system is the so-called robustness. Since the pioneering work on the so-called H ∞ optimal control theory, there has been a considerable progress in H ∞ control theory [4, 18] and [24]. In fact, the switching fuzzy systems the best of our knowledge, the problems of stability analysis and robust H ∞ control of continuous-time switching fuzzy systems with both parametric uncertainties and time-varying delays has not been addressed, which is very challenging and remains open.
The main contribution of the paper is that we investigate the exponential stability of delayed switched nonlinear systems via T–S fuzzy model and get relaxed conditions. In addition, we present new H ∞ control design for uncertain continuous-time switched fuzzy systems with time-varying delay based on PFLKFs. Compared with the results based on PLKFs introduced in [14], the result based on PFLKFs is more relaxed. Moreover, the stability checking results, the switching laws and control laws can be obtained by solving a set of LMIs that are numerically tractable with commercially available software.
The rest of this paper is organized as follows. System descriptions and preliminaries are presented in Sect. 2. Stability analysis of uncertain continuous-time switching fuzzy systems with time-varying delays is presented in Sect. 3. H ∞ stability analysis and controller design for such systems is considered in Sect. 4. In Sect. 5, a numerical example and the application to the H ∞ control of uncertain radio-controlled (R/C) hovercraft with time-varying delays are provided to demonstrate effectiveness of our results. Finally, conclusions are given in Sect. 6.
Notations
The notations used are fairly standard. We use P>0 (≥,<,≤0) to denote a positive definite (semi-definite, negative definite, semi-negative definite) matrix P. \(\mathbb{R}^{n}\) denotes the n-dimensional Euclidean space and L 2[0,∞) is the space of square integrable functions on [0,∞). For τ>0, let \(\mathbb{R}_{+} = [0, +\infty]\) and \(C_{n} = C^{1}([-\tau,0], \mathbb{R}^{n})\) be the Banach space of continuously differentiable mapping from \(([-\tau, 0], \mathbb{R}^{n})\) to \(\mathbb{R}^{n}\) with topology of uniform convergence. ∥⋅∥ denotes the usual 2-norm and \(\| x(t + \theta)\|_{d} = \sup_{-\tau \leq\theta\leq0}\{\| x(t + \theta)\|, \|\dot {x}(t + \theta)\|\}\). λ max(P) and λ min(P) denote the maximum and minimum eigenvalues of P. I and O represent the identity and zero matrices in the block matrix. The superscript ‘T’ stands for matrix transpose; and the symmetric terms in a matrix are denoted by ∗. Matrices, if not explicitly stated, are assumed to have compatible dimensions.
2 System Descriptions and Preliminaries
In this paper, we consider systems described by
where \(x(t) \in\mathbb{R}^{n}\) is the state, \(u(t) \in\mathbb {R}^{m}\), is the control, \(w(t) \in\mathbb{R}^{p}\) is the exogenous disturbance which belong to L 2[0,∞) and \(y(t) \in\mathbb {R}^{q}\) is the output. ϕ(t) is the continuous vector-value function specifying the initial state of the system and τ σ(t)(t) is the continuous time-varying delay satisfying \(0 \leq\tau _{\sigma(t) }(t) \leq\tau_{\sigma(t) }, \dot{\tau}_{\sigma(t) }(t) \leq \kappa_{\sigma(t) }\). f σ(t)(⋅),h σ(t)(⋅),d σ(t)(⋅), g σ(t)(⋅),l σ(t)(⋅), m σ(t)(⋅),n σ(t)(⋅) are the Lipschitz functions.
The right continuous function σ(t): \([0, \infty) \rightarrow \underline{S} = \{1, 2, \ldots, s \}\) is the switching signal, s is the number of switching regions. Corresponding to the switching signal σ(t), we have the switching sequence \(\{x_{t_{0}}; (i_{0}, t_{0}), \ldots, (i_{k}, t_{k}), \ldots, \mid i_{k} \in\underline {S}, k = 0, 1, \ldots\}\), which means that the i k th nonlinear subsystem is activated when t∈[t k ,t k+1). In addition, we exclude Zeno behavior for all types of switching signals as commonly assumed in literature. We assume that the state of the switched system (1) does not jump at the switching instants, i.e., the trajectory x(t) is everywhere continuous.
Takagi and Sugeno [15] have proposed a fuzzy model to represent nonlinear systems. It is proved that the Takagi–Sugeno fuzzy model is a universal approximator. Then each nonlinear subsystem of (1) \(i \in \underline{S}\) could be represented by a T–S fuzzy model described by r i rules of the following uncertain form with time-varying delay:
Local Plant rule k, \(k \in\underline{R}_{i} \triangleq\{1, 2, \ldots, r_{i}\}\)
\(\textbf{IF}\ z^{i}_{1}\) is \(M_{k1}^{i}\) and … and \(z^{i}_{e}\) is \(M_{ke}^{i}\) THEN
\(M^{i}_{kl}\) are fuzzy sets and \(z_{l}^{i}\) (l=1,2,…,e) are the premise variables. (A ik ,A idk ,B ik ,D ik ,E ik ,E idk ,C ik ) is the kth local model in the ith switching region of the system, and (ΔA ik ,ΔA idk ,ΔB ik ,ΔD ik ) is the uncertainty terms of the kth local model in the ith switching region of the system. In this paper, the uncertainty terms are assumed to be of the form
where M ik ,N i1k ,N i2k ,N i3k and N i4k are known real constant matrices and F i (t) is an unknown time-varying matrix function satisfying
From [3, 15], through the use of “fuzzy blending” the final switching fuzzy system (2) is inferred as follows:
with \(v_{ik}(t) = \prod_{p=1}^{e_{i}}M^{i}_{kp}(z^{i}_{p}(t) ), h_{ik}(t) = \frac{v_{ik}(t) }{\sum^{r_{i}}_{k=1}v_{ik}(t) }\), and \(M^{i}_{kp}(z^{i}_{p}(t) )\) is the grade of the membership function of \(z^{i}_{p}\) in \(M_{kp}^{i}\). It is assumed that v ik (t)≥0 for all t≥0, \(i \in\underline{S}, k \in\underline{R}_{i} \). Therefore the normalized membership function h ik (t) satisfies \(h_{ik}(t) \geq0, \sum^{r_{i}}_{k = 1}h_{ik}(t) = 1, t \geq0\).
For convenient notation, we introduce \({{\bar{A}}_{ik}} = {A_{ik}} + \Delta{A_{ik}},{{\bar{A}}_{idk}} = {A_{idk}} + \Delta{A_{idk}},{{\bar{B}}_{ik}} = {B_{ik}} + \Delta {B_{ik}},{{\bar{D}}_{ik}} = {D_{ik}} + \Delta{D_{ik}}\). Then, using this notation, the system model (5) can be expressed as
To end this section we state the following definitions and lemmas which will be used throughout the paper.
Definition 1
The equilibrium x ∗=0 of system (5) is said to be robust exponentially stable under control law u(t) and switching signal σ(t) if the solution x(t) of system (1) with w(t)=0 through \((t_{0}, \phi_{\sigma(t) }) \in\mathbb{R}_{+} \times C_{n}\) satisfies \(\| x(t) \|\leq K\| x(t_{0})\| _{d}e^{-\lambda(t-t_{0})}\), ∀t≥t 0, for constant K>0 and λ>0.
Definition 2
[1]
For any T 2>T 1≥0, let N σ (T 1,T 2) denote the number of switching of σ(t) over (T 1,T 2). If N σ (T 1,T 2)≤N 0+(T 2−T 1)/T α holds for T α >0,N 0≥0, then T α is called average dwell time.
Definition 3
For γ>0, system (5) is said to have H ∞ performance γ, if it is exponentially stable and under zero initial condition \(\phi_{i}(\theta) = 0, \theta\in[-\tau _{i}, 0], i \in\underline{S}_{i}\), we have \(\int_{0}^{\infty}{y^{T}}(s)y(s)\,ds \le{\gamma^{2}}\int_{0}^{\infty}{{w^{T}}(s)w(s)\,ds} \).
Lemma 1
[5]
For any real matrices X i ,X ij for i,j=1,2,…,r, and Q>0 with appropriate dimensions, we have
where h i (t)≥0, \(\sum^{r}_{i = 1}h_{i}(t) = 1\ (1 \leq i \leq r)\).
Lemma 2
[12]
Given matrices Q=Q T,H,E and R=R T>0 of appropriate dimensions, Q+HFE+E T F T H T<0 holds for all F satisfying F T F≤R, if and only if there exists scalar β>0 such that Q+βH T RH+β −1 E T RE<0.
3 Robust Stability
In this section, we consider the stability analysis of the systems (6) described in the last section. The stability condition for the system without control input and external disturbance can be summarized in the following theorem.
Theorem 3.1
The system (5), or equivalently (6) with
u(t)≡w(t)≡0, suppose that the time-varying delay
τ
i
(t) satisfies
\(0 \leq\tau_{i}(t) \leq\tau_{i}, \dot{\tau}_{i}(t) \leq \kappa_{i}(\tau_{i} > 0, i \in\underline{S})\). For given positive constants
α
and
β, if there exist matrices
\(P^{T}_{i} = P_{i} > 0, Q^{T}_{ik} = Q_{ik} > 0, R^{T}_{ik} = R_{ik} > 0\),  , and any matrices
Y
ik
and
T
ik
with appropriate dimensions such that
, and any matrices
Y
ik
and
T
ik
with appropriate dimensions such that
where
with
Then, system is exponentially stable for any switching signal with average dwell time satisfying
Moreover, an estimate of state decay is given by
where
and λ=1/2(α−lnμ/T α ), μ≥1 satisfies
Proof
Consider the following PFLKFs for the system (6) with u(t)≡w(t)≡0:
where V i1(t)=x T(t)P i x(t), \({V_{i2}}(t) = \int_{ - {\tau _{i}}}^{0} {\int_{t + \theta}^{t} {{{\dot{x}}^{T}}} } (s){e^{ - \alpha(t - s)}}{Q_{i}}(s)\dot{x}(s)\,ds\,d\theta\) with \({Q_{i}}(s) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(s){Q_{ik}}}\), \({V_{i3}}(t) = \int_{t - {\tau _{i}}(t) }^{t} {{x^{T}}(s)} {e^{ - \alpha(t - s)}}{R_{i}}(s)x(s)\,ds\) with \({R_{i}}(s) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(s){R_{ik}}}\).
Then, one has
Let \(\eta^{T}(t) = [x^{T}(t) , x^{T}(t - \tau_{i}(t) )], \widehat{X}_{ik} = [\bar{A}_{ik}, \bar{A}_{idk}]\) and by Lemma 1 we have
From Leibniz–Newton, we obtain
with \({Y_{i}}(t) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(t) {Y_{ik}}}\) and \({T_{i}}(t) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(t) {T_{ik}}}\).
It holds that
Combining (14)–(20), \(\dot{V}_{i}(t) + \alpha V_{i}(t) \) can be presented totally as follows:
where
Next, let
then by Schur complement, conditions (7) is equivalent to the following inequalities:
From Lemma 2 and (4) we know that when (22) is satisfied, the following inequalities hold:
Then using Schur complement again, inequalities in (23) are equivalent to the following condition:
Thus from (24) and (21) we conclude that (7) and (8) imply \(\dot {V}_{i}(t) + \alpha V_{i}(t) < 0\), then integrating \(\dot{V}_{i}(t) + \alpha V_{i}(t) < 0\) from t k to t gives
There exists matrix Q 0 such that μQ jl ≥Q 0≥Q ik , then we have
Obviously, from (14) we have V i2(t)≤μV j2(t). Similarly, V i3(t)≤μV j3(t). Finally, using (13) and (14) at switching time t i , we have
Therefore, it follows from (10), (25) and (26) and the relation k=N σ(t)≤N 0+(t−t 0)/T α with N 0≥0 that
According (12) and (14) we have
Let λ=1/2(α−lnμ/T α ), combining (27) and (28) gives rise to
Therefore \(\Vert {x(t) } \Vert \le\sqrt{\frac{b}{a}} {\mu ^{{N_{0}}/2}}{e^{ - \lambda(t - {t_{0}})}}{\Vert {x({t_{0}})} \Vert _{d}}\), thus the proof is completed. □
Corollary 3.1
For \(\dot{d}(t) \) does not exist or is unknown, when (7) with R ik =0 and (8) hold, the system (5), or equivalently (6) with u(t)≡w(t)≡0 is exponentially stable for any switching signal with average dwell time satisfying (10). Moreover, an estimate of state decay is given by (11), where λ=1/2(α−lnμ/T α ), a and b are given in (12) with R ik =0, and μ≥1 satisfies (13) with R ik =R jn =0.
Proof
The proof is similar to that of Theorem 3.1. □
Remark 3.1
PLKFs used in [3] to study switching linear system with delays can also be extended to switching fuzzy system with Q ik =Q i ,R ik =R i , X ik11=X i11,X ik12=X i12,X i22=X i22, Y ik =Y i and T ik =T i . But the results summarized as follows are conservative compared with the result in Theorem 3.1 based on PFLKFs.
Corollary 3.2
The system (5), or equivalently (6) with
u(t)≡w(t)≡0, suppose that the time-varying delay
τ
i
(t) satisfies 0≤τ
i
(t)≤τ
i
and
\(\dot{\tau}_{i}(t) \leq\kappa_{i}(\tau_{i} > 0, i \in\underline{S})\). For given positive constants
α
and
β, if there exist matrices
\(P^{T}_{i} = P_{i} > 0, Q^{T}_{i} = Q_{i} > 0, R^{T}_{i} = R_{i} > 0\),  , and any matrices
Y
i
and
T
i
with appropriate dimensions such that
, and any matrices
Y
i
and
T
i
with appropriate dimensions such that
with
Then, system is exponentially stable for any switching signal with average dwell time satisfying (10). Moreover, an estimate of state decay is given by (11) where
λ=1/2(α−lnμ/T α ), and μ≥1 satisfies
Proof
The proof is similar to that of Theorem 3.1, here it is omitted. □
4 H ∞ Analysis and Controller Design
In this section, we first analyze the H ∞ disturbance attenuation performance for the open loop continuous-time system. Consider the continuous-time system with time-varying delay as in (6) without control input, then we are ready to present the following H ∞ performance analysis result.
Theorem 4.1
Consider continuous-time system as in (6) with u(t)≡0, suppose that the time-varying delay τ i (t) satisfies 0≤τ i (t)≤τ i and \(\dot{\tau}_{i} \leq \kappa_{i}(\tau_{i} > 0, i \in\underline{S})\). Given positive constants α, β, γ and there exist matrices
and any matrices \(Y_{ik},T_{ik}, L_{ik}, k \in \underline{R}_{i}, i \in\underline{S}\), with appropriate dimensions such that
where
and φ ik11,φ ik12,φ ikm22 are defined in (9).
Then the system is exponentially stable and has H ∞ γ performance as in Definition 3 for any switching signal with average dwell time satisfying (10) and μ≥1 satisfies (13).
Proof
It is easy to see that the LMIs (35) and (36) imply LMIs (7) and (8), respectively; therefore, it follows from Theorem 3.1 that the system as in (6) with u(t)≡0 is exponentially stable. Now, we show that the system have H ∞ performance by Definition 3.
Under zero initial condition, for system (6) considering PFKLFs (14) and by Lemma 1 we have (16), (17) and the following results:
where η T(t)=[x T(t),x T(t−τ i (t))],ξ T(t)=[x T(t),x T(t−τ i (t)),w T(t)].
From Leibniz–Newton, we obtain
with \({Y_{i}}(t) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(t) {Y_{ik}}}\), \({T_{i}}(t) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(t) {T_{ik}}}\) and \({L_{i}}(t) = \sum_{k = 1}^{{r_{i}}} {{h_{ik}}(t) {L_{ik}}}\).
For Λ ik ≥0 given in Theorem 4.1, we have
Define \({\varsigma^{T}}(t,s) = [{\xi^{T}}(t) ,\dot{x}^{T}(s)]\), then combine (14), (16)–(17) and (38)–(42) yields
where
with ϕ ik11,ϕ ik12,ϕ imk22 are defined in (21).
By Schur complement, conditions (35) are equivalent to the following inequalities:
with
By Lemma 2 we know that when (44) are satisfied the following inequalities hold:
where \({\hat{\bar{A}}^{T}_{ikl}} = [ {{Q_{il}}{{\bar{A}}_{ik}}} \ \ {{Q_{il}}{{\bar{A}}_{idk}}} \ \ {{Q_{il}}{{\bar{D}}_{ik}}} ]\).
Then using Schur complement again, (45) are equivalent to the following condition with Ω imkl given in (43):
Thus from (43) and (46) we conclude that when (35) and (36) hold the inequality as follows is satisfied:
Let X(t)=y T(t)y(t)−γ 2 w T(t)w(t). Using (13) and (14) at switching time t i , we have (26). Let t 0=0, therefore it follows from (26) and (47) and the relation k=N σ (0,t), for any t∈[t k ,t k+1) we have
Under zero initial condition, (48) gives \(- \int_{t_{k}}^{t} {{e^{ - \alpha(t - s)}}} X(s)\,ds \ge0\). Similarly, we have
Multiplying both sides of (32) by \(e^{-N_{\sigma}(0, t)\ln\mu}\) yields
Noticing that N(0,s)≤N 0+s/T α ,N 0>0 and T α >lnμ/α, we have
Thus, it follows from (33) and (34) that
Then multiplying both sides of (49) by e α(t−s) yields
integrating both sides of this inequality from t=0 to ∞ leads to H ∞ performance by Definition 3. Thus this complete the proof. □
Remark 4.1
When we get lower bound μ, the lower bound \(T^{*}_{\alpha}\) by (10) can be obtained. Then, the search problem of lower bound μ can be formulated as the following GEVP problem to obtain
Meanwhile for a given μ>μ min the search problem of lower bound γ can be formulated as the following optimal problem to obtain
Corollary 4.1
For \(\dot{d}(t) \) does not exist or is unknown, when (35) with R ik =0 and (36) hold, the system (6) with u(t)=0 is stable and has H ∞ performance for any switching signal with average dwell time satisfying (10).
Proof
Its proof is similar to that of Theorem 4.1, it is omitted here. □
Next we consider H ∞ controller problems. Recall that the PDC technique was presented by [18, 19], the control law can be given as follows:
Then the closed-loop system (6) is rewritten as follows:
Theorem 4.2
Consider the closed-loop system (53) with time-varying delays τ i (t) satisfies 0<τ i (t)≤τ i and \(\dot{\tau}_{i}(t) \leq\kappa_{i}(\tau_{i} > 0, i \in \underline{S})\). For given positive constants α and γ, if there exist scalar β>0 and matrices
and any matrices \(\tilde{Y}_{ik}, \tilde{T}_{ik}, \tilde{L}_{ik}\) with appropriate dimensions such that
where
Then the system (53) is exponentially stable with γ-disturbance attenuation H ∞ performance under the control law for any switching signal with average dwell satisfying (10), and μ≥1 satisfies
Moreover, the feedback gain is given by \(F_{ik} = K_{ik}\tilde {P}^{-1}_{i}, k \in\underline{R}_{i}, i \in\underline{S}\).
Proof
Consider the PFLKFs (14), one has (16), (17), and
Let ϑ T(t)=[x T(t),x T(t−τ i (t)),w T(t)], \(\Delta_{ikl}^{T} = [ { {{{\bar{A}}_{ik}} + {{\bar{B}}_{ik}}{F_{il}}} \ \ {{{\bar{A}}_{idk}}} \ \ {{{\bar{D}}_{ik}}} } ]\), \(\tilde{\varLambda}_{ikl}^{T} =[ { {{E_{ik}} + {C_{idk}}{F_{il}}} \ \ {{E_{idk}}} \ \ 0 } ]\), and by Lemma 1 and from system (51) one has
Then the rest of the proof is similar to the proof of H ∞ performance analysis in Theorem 4.1, here it is omitted.
Based on the result in Theorem 4.1, we get (36) and the following inequalities which correspond to (54) with \(m, n \in\underline{R}_{i}, i \in\underline{S}\):
where
Then pre- and post-multiplying (60) by \(\operatorname{diag}\{P^{-1}_{i}, P^{-1}_{i}, I, Q_{im}^{-1}, Q_{im}^{-1}, I, I, I, I, I, I\}\) and its transposed matrix, (36) by \(\operatorname{diag}\{P^{-1}_{i}, P^{-1}_{i}, I, Q^{-1}_{ik}\}\), respectively, and applying the change of variable such that \({{\tilde{P}}_{i}} = P_{i}^{ - 1},{{\tilde{Q}}_{ik}} = Q_{ik}^{ - 1},{{\tilde{R}}_{ik}} = {{\tilde{P}}_{i}}{R_{ik}}{{\tilde{P}}_{i}}, {{\tilde{Y}}_{ik}} = {{\tilde{P}}_{i}}{Y_{ik}}{{\tilde{P}}_{i}},{{\tilde{T}}_{ik}} = {{\tilde{P}}_{i}}{T_{ik}}{{\tilde{P}}_{i}},{{\tilde{L}}_{ik}} = {L_{ik}}{{\tilde{P}}_{i}},{K_{iv}} = {F_{iv}}{{\tilde{P}}_{i}},{{\tilde{X}}_{ik11}} = {{\tilde{P}}_{i}}{X_{ik11}}{{\tilde{P}}_{i}}, {{\tilde{X}}_{ik12}} = {{\tilde{P}}_{i}}{X_{ik12}}{{\tilde{P}}_{i}},{{\tilde{X}}_{ik13}} = {{\tilde{P}}_{i}}{X_{ik13}},{{\tilde{X}}_{ik22}} = {{\tilde{P}}_{i}}{X_{ik22}}{{\tilde{P}}_{i}}\), \({{\tilde{X}}_{ik23}} = {{\tilde{P}}_{i}}{X_{ik23}},{{\tilde{X}}_{ik33}} = {X_{ik33}} \), we get inequalities (13), (54), and (55); this completes the proof. □
5 Simulation examples
In this section, two simulation examples are given to illustrate the effectiveness of the proposed approach.
Example 1
(H ∞ performance analysis)
Let \(x^{T}(t) = [x_{1}^{T}(t) , x_{2}^{T}(t) ]\), consider the following two uncertain switching fuzzy time-varying delays system (5) with u(t)≡0.
Switching Region 1:
Switching Region 2:
Membership functions: h i1(t)=sin2(t),h i2=1−sin2(t), i=1,2.
First of all we will compare the feasible regions of the system w(t)≡0 for the results in Theorem 4.1 (PFLKFs) and the results in Corollary 4.1 (PLKFs) for given τ i =0.29,κ i =3,β=0.8,α=0.63,μ=1.60 and γ=1.7321 by changing a and b, by changing a and b, where a takes value between −0.2 and 0.2 by step of 0.05 and b takes value between 0.3 and 0.8 by step of 0.05. The simulation in Fig. 1 show the result by Theorem 4.1 covers bigger regions than the one by Corollary 4.1, which means conditions in Theorem 4.1 is more relaxed.

Feasible area for PLKFs and PFLKFs
Next, using PLKFs and PFLKFs, respectively, the achievable minimum H ∞ attenuation level γ min for the robust H ∞ stability analysis can be obtained and is summarized in Table 1 for different τ i ,κ i ,μ and α. From it we can see that the result we obtain by PFLKFs is smaller than PLKFs.
From Fig. 1 and Table 1, it can be seen that the PFLKFs based approach produces less conservative results than the PLKFs (widely used in [14]) based approach.
Example 2
(R/C Hovercraft [17])
The controlled object of hovercraft type vehicle (HTV) dynamics is represented as
where f 1(t)=f R (t)+f L (t),f 2(t)=f R (t)−f L (t); θ is the angle of the vehicle; l is the distance between the gravity position and fans; ϕ is the angle between the gravity position and fans; f R is the force generate by right side fan; f L is the force generated by left side fan; M is the mass of the hovercraft; I is the inertia of the hovercraft. In this simulation, ϕ=π/4,M=0.1. The control purpose is lim t→∞ y c (t)=0 and lim t→∞ θ(t)=0 by manipulating f 1(t) and f 2(t). Due to modeling error or external disturbance, the practical system are always subject to various kinds of uncertainties and time-varying delays are universal by various of factors. To make a switching fuzzy model for (61) and (62), assume that θ(t)∈[−179.427∘ 179.427∘]. Thus we can construct the following uncertain switching fuzzy model of system (61) and (62) with time-varying delays. The parameter matrices are given as follows:
Here,
and w T(t)=[e −0.8t,e −0.1t] is external disturbance with F i (t)=sin(t).
Its the membership functions are given as:
with a 11=1,a 12=sin(179.427o)≃0.01,a 21=1,a 22=sin(d)/d,a 31=−1 and a 32=sin(−179.427o)≃−0.01.
For γ=2,α=0.1,β=0.8,τ i =2,κ i =0.001,μ=4 and d=π/50,C=0.5. Thus \(T^{*}_{\alpha} = \ln\mu /\alpha= 13.863\), the switching law in Fig. 2 (here, ‘1’, ‘2’ and ‘3’ represent the first, second, and third switching region, respectively) shows that average dwell time \(T_{\alpha} = 17.5 > T^{*}_{\alpha}\) doses satisfy (10). Under the switching law, using Theorem 4.2 we can get the feedback gains as

Switching signal
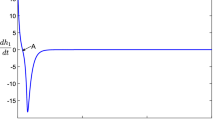
Figure 3 shows the output y 1(t)=y c (t),y 2(t)=θ(t) responses of the closed-loop system in the presence of disturbances. It can be observed that the controller proposed in this paper based on PFLKs not only stabilizes the system, but also effectively attenuates the disturbances.

Output y(t)
6 Conclusions
In this paper, a H ∞ controller design method is developed for uncertain switching fuzzy systems with time-varying delays based on PFLKFs. It is shown that the stability and control synthesis results based on the PFLKFs are less conservative than those based on the PLKFs. A numerical example and a real plant are presented to demonstrate the advantages of the proposed approach. As for switched systems, if there exist some unstable subsystems the systems may be still be stable. However, the controllers designed in this paper and others all require the controlled subsystems are stable, not allow to have unstable ones. Thus, the controlled systems which is allowed to have unstable systems will be our future interesting work. An asynchronous controller may be a solution.
References
M.S. Branicky, J.H. David, Switched Linear Systems Control and Design (Springer, New York, 2004)
D.J. Choi, P. Park, Guaranteed cost controller design for disrete-time switching fuzzy systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 34(1), 13–23 (2004)
G. Feng, A survey on analysis and design of model-based fuzzy control systems. IEEE Trans. Fuzzy Syst. 14(5), 676–697 (2006)
G. Feng, C.L. Chen, D. Song, Y. Zhou, H ∞ controller synthesis of fuzzy dynamic systems based on piecewise Lyapunov functions and bilinear matrix inequalities. IEEE Trans. Fuzzy Syst. 13(1), 94–103 (2003)
X.P. Guan, C.L. Chen, Delay-dependent guaranteed cost control for T–S fuzzy systems with delays. IEEE Trans. Fuzzy Syst. 12(2), 236–248 (2004)
C.P. Huang, Model based fuzzy control with affine T–S delayed models applied to nonlinear systems. Int. J. Innov. Comput. Inf. Control 8(5), 2979–2993 (2012)
Q.K. Li, J. Zhao, X.J. Liu, G.M. Dimirovski, Observer-based tracking control for switched linear systems with time-varying delay. Int. J. Robust Nonlinear Control 21, 309–327 (2011)
H.Y. Li, B. Chen, Q. Zhou, W.Y. Qian, Robust stability for uncertain delayed fuzzy hopfield neural networks with markovian jumping parameters. IEEE Trans. Syst. Man Cybern. 39(1), 94–102 (2009)
H.Y. Li, H.H. Liu, H.J. Gao, P. Shi, Reliable fuzzy control for active suspension systems with actuator delay and fault. IEEE Trans. Fuzzy Syst. 20(2), 342–357 (2012)
D. Liberzon, Switching in Systems and Control (Birkhauser, Boston, 2003)
C.D. Persis, R.D. Santis, A.S. Morse, Switched nonlinear systems with state-dependent dwell-time. Syst. Control Lett. 50(4), 291–302 (2003)
I.R. Petersen, A stabilization algorithm for a class of uncertain linear systems. Syst. Control Lett. 8, 351–357 (1987)
X. Su, P. Shi, L. Wu, Y.D. Shi, A novel approach to filter design for T–S fuzzy discrete-time systems with time-varying delay. IEEE Trans. Fuzzy Syst. 20(2), 1114–1129 (2012). doi:10.1109/TFUZZ.2012.2196522
X.M. Sun, J. Zhao, J.H. David, Stability and L 2-gain analysis for switched delay systems: a delay-dependent method. Automatica 42, 1769–1774 (2006)
T. Takagi, M. Sugeno, Fuzzy identification of systems and its application to modeling and control. IEEE Trans. Syst. Man Cybern. 15(11), 116–132 (1985)
K. Tanaka, T. Hori, H.O. Wang, A multiple Lyapunov function approach to stabilization of fuzzy control systems. IEEE Trans. Fuzzy Syst. 11(4), 582–589 (2003)
K. Tanaka, M. Iwasaki, H.O. Wang, Switching control of an R/C Hovercraft: stabilization and smooth switching. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 31(6), 13–23 (2001)
L. Wang, G. Feng, Piecewise H ∞ controller design of discrete time fuzzy systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 34(1), 682–686 (2004)
H.O. Wang, K. Tanaka, M.F. Griffin, An approach to fuzzy control of nonlinear systems: stability and design issues. IEEE Trans. Fuzzy Syst. 4(1), 14–23 (1996)
L. Wang, W.X. Zheng, On H ∞ model reduction of continuous time-delay switched systems, in Proceedings of the IEEE, (2007), pp. 405–410
L. Wu, J. Lam, Sliding mode control of switched hybrid systems with time-varying delay. Int. J. Adapt. Control Signal Process. 22, 909–931 (2008)
L. Wu, X. Su, P. Shi, Model approximation for discrete-time state-delay systems in the T–S fuzzy framework. IEEE Trans. Fuzzy Syst. 19(2), 366–378 (2011)
L. Wu, X. Su, P. Shi, J. Qiu, A new approach to stability analysis and stabilization of discrete-time T–S fuzzy time-varying delay systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 41(1), 273–286 (2011)
G.H. Yang, J. Dong, Switching fuzzy dynamic output feedback H ∞ control for nonlinear systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 40(2), 682–686 (2010)
L. Zhang, P. Shi, Stability, l 2-gain and asynchronous control of discrete-time switched systems with average dwell time. IEEE Trans. Syst. Man Cybern., Part B, Cybern. 40(2), 682–686 (2010)
X. Zhang, Z. Zhang, G. Lu, Fault detection for state-delay fuzzy systems subject to random communication delay. Int. J. Innov. Comput. Inf. Control 8(4), 2439–2451 (2012)
Acknowledgements
The work described in this paper was partially supported partly by a grant from the National Natural Science Foundation of China (Grant No. 60904004, No. 60904061), partly by the Natural Science Foundation of Jiangsu Province (Grant NO. BK2010493), partly by the Qing Lan Project, partly by a grant from the Fundamental Research Funds for the Central Universities (Grant No. ZYGX2009J020), and partly by a grant from the Research Grants Council of the Hong Kong Special Administrative Region, China (Project No.: CityU 1353/04E).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Ou, O., Mao, Y., Zhang, H. et al. Robust H ∞ Control of a Class of Switching Nonlinear Systems with Time-Varying Delay Via T–S Fuzzy Model. Circuits Syst Signal Process 33, 1411–1437 (2014). https://doi.org/10.1007/s00034-013-9702-4
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00034-013-9702-4