
Abstract
A low voltage MEMS switch based on electrostatic actuation scheme is introduced and investigated thoroughly. Design variables are length, width, thickness of cantilever, and location of pull down electrode, for micro actuator. The model obtained is simulated in FEM-based software COMSOL multiphysics. In our proposed design, the effect of presence of holes, mechanical stress, actuation voltage, and change in location of pull down electrode has been explained. With the help of structural modification and by varying actuation voltage, the optimized value of 8 V is obtained which is desirable for noble performance. The capacitance is varied with the variation of dimensions and gap between two plates of beam structure with applied force, which is the basic principle of electrostatic actuation scheme.
Access provided by CONRICYT-eBooks. Download conference paper PDF
Similar content being viewed by others

Keywords
13.1 Introduction
Micro actuators are essential components in micro electro mechanical system (MEMS) for producing physical movement at the micro and nanometer level. The micro actuators are based on several actuation principles such as electrostatic actuation [1], electromagnetic actuation [2], Piezoelectric actuation [3] and thermal actuation [4]. At micro level, surface area to volume ratio increases. Hence, surface effect is dominating over volume effect; electrostatic force used for actuation depends on surface area; therefore, complete investigation should be carried out for explaining electrostatic actuation phenomenon at micro and nano level.
MEMS switch provided an alternative choice over semiconductor switch. Simultaneously, it is operated at high actuation voltage, which makes it incompatible for microelectronic circuits. Therefore, most important designing task for MEMS switch is to reduce actuation voltage (V dc). The actuation voltage can be reduced by choice of appropriate design and other parameters used for switching. Their geometry as well as materials is used to determine the actuation voltage, stiffness and lifetime of switch. In some cases, porous beam are preferred to reduce stiffness of beam which finally results in high beam deflection and reduction of residual stress [5]. Including this porous beam also help in removal of sacrificial layer easily. Before actual fabrication, devices are simulated, modeled and analyzed using simulation software to give a complete flow process of the design. For MEMS devices, there are several FEA (Finite Elemental Analysis)-based software such as COMSOL multiphysics, CoventorWare and ANSYS. In this paper, a low actuation voltage MEMS switch is proposed and simulated. The overall switch structure is designed for microelectronics circuits.
13.2 MEMS Switch Design Consideration
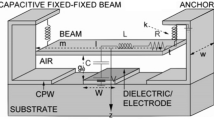
The layout of proposed design of electrostatic-based MEMS switch is shown in Fig. 13.1. The upper plate of a cantilever beam having length 220 µm and width of 100 µm suspended over the anchor, lower plate consist of pull down electrode which behaves as parallel plate capacitor. The tip of cantilever beam is designed in such a way that with application of actuation voltage it short-circuits ‘signal in’ and ‘signal out’ ports; hence provide normal switching action in electronic circuits (Table 13.1).

Schematic diagram of proposed MEMS switch
The MEMS switch has been designed and investigated with the help few governing equations [6, 7]. Capacitance between upper plate and lower plate is given by (13.1),
where, ε denotes the dielectric permittivity of the medium between upper and lower plates, d represents the separation between plates, and A represents the area of individual plate.
Electrostatic potential energy developed with the application of applied voltage (V) is given by (13.2),
Electrostatic potential energy,
Electrostatic force experience by cantilever beam is the negative gradient of potential energy (F = −∇U), and it was found to be
But cantilever beam remains in equilibrium state till spring force (F d = kΔd) is equal to the electrostatic force experience by the cantilever beam. Mathematically, it is represented as
Solving, Eq. (13.4) followed by differentiating obtained potential difference with cantilever tip deflection, pull in voltage is obtained to be,
13.3 Parametric Analysis
The performance variation of MEMS switch has been studied on the basis of electrical parameter as well as mechanical parameter. A very basic design of polysilicon-based MEMS switch, having length 220 μm and width 100 μm as shown in Fig. 13.2, is simulated and compared for different electromechanical parameters.

A very basic design of cantilever-based MEMS switch
13.3.1 Effect of Position of Pull in Electrode
The variation in tip deflection of cantilever switch has been studied with change is position of pull in electrode as shown is Fig. 13.3. It was found that with the increase in separation of pull in electrode from anchor, tip deflection increases, and it is graphically represented by Fig. 13.4.

a, b Different positions (t) of pull in electrode

Graph representing variation in tip displacement with pull in electrode’s position
13.3.2 Effect of Holes
In MEMS switch as shown in Fig. 13.1, small holes are defined in suspended cantilever beam to reduce spring constant (stiffness/k) in order to improve beam deflection. Holes also reduce the residual stress and spread it over a wide area (Fig. 13.5b) rather than concentrated over a line (Fig. 13.5a).

a Top view of cantilever switch showing stress, b top view of a porous cantilever switch showing stress
Stress spread over large area improves lifetime of MEMS switch. Porous cantilever beam also helps in removing sacrificial layer by providing more area of contact between etchant and sacrificial layer. Because of the fringing effect [5], the capacitance between two plates of switch decreases and hence increases pull in voltage, which is not desirable; to avoid it, holes are defined only a particular portion of upper plate as shown in Fig. 13.1.
13.3.3 Effect of Actuation Voltage
13.3.3.1 Tip Deflection of Cantilever Beam
Electrostatic and mechanical forces are responsible for deflection of cantilever tip; whenever electrostatic force (F) exceeds spring force (F Δd), there is a net deflection of cantilever tip from its equilibrium position and for a particular value of applied DC voltage (normally two-third of separation between upper and lower plate) MEMS switch turns ON. This particular voltage is known as pull in voltage as given by Eq. (13.5). Figure (13.6) shows very clear graphical study of applied DC voltage from 0 to 8 V. By applying DC voltage at different position through out the length of the beam, deflection varies significantly, and it was maximum at tip and near anchor which is shown in Fig. 13.6.

A graph representing variation in displacement with applied potential
Figure 13.7 clearly represents short circuiting (ON state) of switch when actuation voltage of 8 V is applied, it remains in ON state until actuation voltage is not removed. With the removal of actuation voltage, cantilever restores its equilibrium position (OFF state), this is because of mechanical restoring force (spring force/F Δd) acted on it.

Schematic diagram of MEMS switch in ON state when actuation voltage 8 V is applied
13.3.3.2 Capacitance Between Two Plates
The capacitance value of electrostatic micro actuator is correlated with actuation voltage by relation given by (\( V \propto C \)). This relationship between applied voltage and capacitance is derived from Eqs. (13.1–13.3). A graph obtained in Fig. 13.8 from simulation result satisfied the capacitance and actuation voltage proportionality relationship. Maximum value of capacitance (0.046 pF) is obtained for applied DC voltage of 7 V.

A graphical representation of variation of capacitance with applied voltage
With the increase in applied actuation voltage, the deflection of cantilever increases which lead to decrease in value d (separation between upper and lower plate of micro actuator). Clearly, from Eq. (13.1),
i.e., enhanced value of cantilever tip deflection is due to increase in capacitance value and vice versa, which is obtained by Fig. 13.9 as shown.

A graphical representation of variation of cantilever tip deflection against capacitance value
So, it was concluded from obtained result that with increase in actuation voltage, the separation between two plates of capacitor decreases [8], i.e., cantilever tip deflection increases which ultimately results in increase in capacitance value. The simulation results obtained in Figs. 13.8 and 13.9 satisfied the same pattern.
13.4 Comparative Analysis
The designed switch is capable of operating at an actuation voltage of 8 V with a dimension of (220 × 100 × 6) µm. RF-MEMS switch by Spasos et al. [9] describes RF-MEMS switch operated at 54.4 V. MEMS switch by Vaibhav et al. [10] designed using Niaro (Au–Ni) was capable of operating at actuation voltage of 14.3 V, which is comparatively low but not suitable for microelectronic circuits. Other than these, few other designs suggest actuation voltages of 20 V and 13 V for their operation. The comparison of the designed switch with the previous work has been shown below in Table 13.2.
Although this design does not operate in ultralow voltage range still with less design complexity, actuation voltage of 8 V is low enough to be integrated in microelectronic circuits.
13.5 Conclusion
The MEMS switch is designed and simulated for low voltage applications. Ideas used for reduction of actuation voltage are decrease in separation between upper plate and lower plate of MEMS switch, well-defined porous cantilever beam, proper position of pull in electrode, and major consideration of industrially available material (polysilicon) for low cost fabrication. The designed and simulated MEMS switch with dimensions (220 μm × 100 μm × 6 μm) can be fabricated using micromachining technique for industrial applications.
References
Lahiri SK, Saha H, Kundu A (2009) RF MEMS SWITCH: an overview at a glance. In: International conference on computer and devices for communication
Yan D, Khajepour A, Mansour R (2003) Modeling of two-hot-arm horizontal thermal actuator. J Micromech Microeng 13:312–322
Seki K, Ruderman M, Iwasaki M (2014) Modeling and Compensation for hysteresis properties in piezoelectric actuators. In: AMC2014-Yokohama 14–16 Mar 2014, Yokohama, Japan
Behlert R, Kunzig T, Schrag G, Wachutka G (2014) Theoretical and experimental investigations on failure mechanisms occuring during long-term cycling of electrostatic actuators. In: IEEE, 15th International conference
Fang DM, Li XH, Yuan Q, Zhang HX (2010) Effect of etch holes on the capacitance and pull-in voltage in MEMS tunable capacitors. Int J Electron 97(12):1439–1448
Srikar VT, Spearing SM (2003) Material selection for microfabricationed electrostatic actuators. Sens Actuators A 102(2003):279–285
Son M, Yin J, Xunjun H, Yue W (2008) Design and analysis of a novel low actuation voltage capacitive. RF MEMS switches. IEEE, Jan 6–9 2008, Sanya, China
Sem Jebar Kumar J, Tetteh EA, Paul Braineard E (2014) A study of why electrostatic actuation is prefered and a simulation of an electrostatically actuated cantilever beam. Int J Eng Sci Emerg Technol 6(5):441–446
Spasos M, Tsiakmakis K, Charalampidis N, Nilavalan R (2011) RF-MEMS switch actuation pulse optimization using Taguchi’s method. Microsyst Technol 17(10):1351–1359
Kolte V, Mahajan PM (2014) Design and analysis of non-uniform shaped RF MEMS switch. J Comput Electron 13(14):547–554
Bansal D, Kumar A, Sharma A, Kumar P, Rangra KJ (2013) Design of novel compact anti-stiction and low insertion loss RF MEMS switch, vol 1(20). Springer, Berlin, pp 337–340
Hu F, Li Z, Qian Y, Yao J, Xiong X, Niu J, Peng Z (2012) A multi-electrode and pre-deformed bilayer spring structure electrostatic attractive MEMS actuator with large stroke at low actuation voltage. J Micromech Microeng 22(9):960–1317
Acknowledgments
The authors would like to thank Hemant Kumar and COMSOL India for their software support, B. Pathak, Aks, Esha, and N. Poddar for discussions and BIT Mesra for resources.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2017 Springer Nature Singapore Pte Ltd.
About this paper
Cite this paper
Kumar, S., Chattoraj, N., Sinha, M.K., Danu, N. (2017). Investigation of Electrostatic Actuation Scheme for Low Voltage MEMS Switch. In: Nath, V. (eds) Proceedings of the International Conference on Nano-electronics, Circuits & Communication Systems. Lecture Notes in Electrical Engineering, vol 403. Springer, Singapore. https://doi.org/10.1007/978-981-10-2999-8_13
Download citation
DOI: https://doi.org/10.1007/978-981-10-2999-8_13
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-2998-1
Online ISBN: 978-981-10-2999-8
eBook Packages: EngineeringEngineering (R0)