
Abstract
We study an evasion differential game of simple motion, involving one pursuer and one evader in the plane \(\mathbb {R}^2\). The control functions of players are subjected to geometric constraints. Maximum speed of the pursuer is equal to 1, and maximal speed of the evader is \(\alpha >1\). Control set of the evader is a sector \(\mathbf {S}\) whose radius is greater than 1. We say that evasion is possible if the state of the evader does not coincide with that of the pursuer at all times. The problem is to find the conditions of evasion. We obtained conditions that guarantee the evasion regardless of the location of initial position of players.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The multiple players pursuit–evasion differential games of simple motion with geometric or integral constraints are widely studied in many works (see eg. [1–12]). For the case of many pursuers against one evader, the game is described by the following differential equations:
where \(x_i, y, u_i, v\in \mathbb {R}^n\), \(\rho _i\ge 0\), \(\sigma >0\), \(x_{i0}\ne y_0\), and \(i=1,\ldots ,m\). Here, pursuit is said to be completed if \(x_i(\tau )=y(\tau )\) for some \(i\in \{1,\ldots ,m\}\) and \(\tau \ge 0\), and evasion is said to be possible if \(x_i(t)\ne y(t)\) for all \(i=1,\ldots ,m\), and \(t\ge 0\).
One of the earliest work of evasion differential game in the case of many pursuers versus one evader was by Pshenichnii [11]. In his work, the maximum speed of each player is equal to 1. The necessary and sufficient condition of evasion was obtained where evasion is possible if and only if \(y_0\notin intconv \{x_{10},\ldots ,x_{m0}\}\).
The current paper is closely related to the following work by Chernous’ko [3]. The author examined the evasion differential game of one evader versus many pursuers which is described by the following simple differential equations:

Trajectory of Evader
Trajectory of one evader against each pursuer is pictured in the following diagram in Fig. 1 where Q is the position of point P at time \(t_A\); \(\alpha \) is the angle between the ray x and segment \({ {AQ}}\) where \(0\le \alpha \le \pi \); R is the current distance QE; \(\varphi \) is the current angle between the segments QE and QA, and s is the arc length of curve AE. The author’s strategy is to ensure \(EP\ge L\) for all \(t\ge t_0\) before the evader moving back to the horizontal line and continue to move away from pursuer horizontally. By the strategy, he proved that evasion is possible.
Also, the work by Ibragimov et al. [5] was devoted on differential game of evasion. The work deals with the evasion differential game of m pursuers \(x_1,\ldots ,x_m\) and one evader y described by the equations
The game occurs in the plane and the following conditions:
were imposed on control functions of the players. The main result of the paper is as follows: if the total resource of pursuers does not exceed that of evader, that is \(\rho ^2_1+\rho ^2_2+\ldots \rho ^2_m\le \sigma ^2\), then evasion is possible.
We are to construct a different approach and strategy for evasion problem which is similar to Chernous’ko’s [3], for the case of one evader against one pursuer. Like Chernous’ko’s problem, evader is moving on a straight line as pursuer is approaching the evader. When the distance between them reaches a particular distance which is greater than zero, the evader will maneuver to avoid the pursuer. The strategy of the maneuver is different from Chernous’ko’s where the control set of the evader in our problem is a sector. We also assume the maximal speed of the pursuer is equal to 1 and the maximal speed of the evader is \(\alpha \) where \(\alpha >1\). We find a sufficient condition for the evader to escape from the pursuer.
2 Statement of the Problem
We study an evasion differential game of one pursuer P and one evader E with geometric constraints on controls of players described by equations:
where \(x, x_{0}, u, y, y_0, v \in \mathbb {R}^2\), \(x_{0}\ne y_0\), u is the control parameter of the pursuer P, v is that of the evader E,
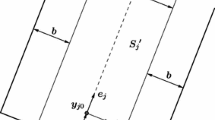
\(\alpha >1\) and \(\varphi \), \(0<\varphi <\frac{\pi }{2}\), is a given angle. Note that \(\mathbf {S}\) is a sector with the radius \(\alpha \) and central angle \(2\varphi \) (Fig. 2).

Sector \(\mathbf {S}\)
Definition 1
A Borel measurable function \(u(t)=(u_{1}(t),u_{2}(t))\), \(|u(t)|\le 1\), \(t\ge 0\), is called admissible control of the pursuer x.
Definition 2
A Borel measurable function \(v(t)=(v_1(t),v_2(t))\), \(v(t)\in \mathbf {S}\), \(t\ge 0\), is called admissible control of the evader y.
Definition 3
A function
is called strategy of the evader, if for any admissible control u(t) the following initial value problem
has a unique solution (x(t), y(t)), \(t\ge 0\), with absolutely continuous components x(t) and y(t).
Definition 4
We say that evasion is possible in the game (1)–(2) if there exists a strategy V of the evader E such that for any admissible control of the pursuer \(x(t)\ne y(t)\) for all \(t\ge 0\).
Problem
Find sufficient conditions of evasion in the game (1)–(2).
The condition \(v(t)\in \mathbf {S}\), \(t\ge 0\), implies that state of the evader y(t) belongs to the sector \(\mathbf {S}_1=\{y_0+ta \ | \ a\in \mathbf {S},t\ge 0\}\). Initial position of the pursuer may be in \(\mathbf {S}_1\) as well as outside \(\mathbf {S}_1\). In process of pursuit, the pursuer can move throughout the plane. In this regard, the pursuer have advantage. However, the evader has advantage in speed, since \(\alpha >1\).
3 Main Result
The main result of the paper is the following statement.
Theorem 1
If \(\alpha \cos \varphi _0\ge 1\) and \(\alpha \sin \varphi _0>1\) at some \(0<\varphi _0\le \varphi \), then evasion is possible in the game (1)–(2).
Proof
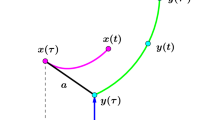
Choose any number a, \(0<a<\min |x_{0}-y_0|\). We construct a strategy for the evader as follows:
where \(\tau \) is the first time when \(|y(\tau )-x(\tau )|=a\),
Note that such a time \(\tau \) may not exist. If so, then we let \(v(t)=(0,\alpha )\) for all \(t\ge 0\). In (3), \(\pm \) means \(v_1(t)=c+|u_{1}(t)|\), if \(x_{1}(\tau )\le y_1(\tau )\) and \(v_1(t)=-(c+|u_{1}(t)|)\), if \(x_{1}(\tau )\ge y_1(\tau )\), where \(x(t)=(x_{1}(t),x_{2}(t))\), \(y(t)=(y_1(t),y_2(t))\).
Estimate \(|y(t)-x(t)|, \tau \le t\le t_1\). We have
Without loss of generality, we assume that \(y_1(\tau )\ge x_{1}(\tau )\), and hence \(v_1(t)=c+|u_{1}(t)|\), \(\tau \le t\le t_1\). Then, on the other hand, for the points x(t) and y(t) we have
Thus, \(|y(t)-x(t)|\ge f(t)\), where
Note that the function f(t) has only one minimum on \([\tau ,t_1]\), since the first function in the \(\max \) decreases, whereas the second function increases. The function f(t) takes its minimum at
We have
In particular, at the time \(t_{1}\)
Moreover, at the time \(t=t_1\) the pursuer cannot be above the horizontal line \(y=y_2(t_1)\) of the xy-plane. Indeed,
It is not difficult to show that
Then right-hand side of (5) can be estimated from below by
Thus, \(y_2(t_1)\ge x_{2}(t_1)\).
Next, according to (3) \(v(t)=(0,\alpha )\), \(t>t_1\). We estimate \(|x(t)-y(t)|\) at \(t>t_1\). Since
and
Last inequality because of \(y_2(t_1)\ge x_{2}(t_1)\) and \(|u_{2}(t)|\le 1\).
Therefore
Using the triangle inequality, we can estimate right-hand side of this inequality from below by
By the Cauchy–Schwarz inequality we obtain
Therefore,
since \(|y(t_1)-x(t_1)|^2\ge (\frac{ac}{2\alpha })^2\).
To estimate the expression (6) from below, we let \(\dfrac{ac}{2\alpha }=b\), \((t-t_1)=x\) and consider the function
This function takes its minimum at \(x=x_*=\dfrac{b}{\alpha \sqrt{\alpha ^2-1}}\). Thus
Next, we estimate \(y_2(t)-x_{2}(t)\) for \(t\ge \tau '=\tau +ra\) where
Since \(y_2(t_1)\ge x_{2}(t_1)\),
where \(p=\dfrac{(\alpha -1)c}{2\alpha ^{2}\sqrt{\alpha ^{2}-1}}\). \(\square \)
Thus, we can conclude that
-
(1)
\(|x(t)-y(t)|\ge a\) for \(0\le t\le \tau \),
-
(2)
\(|x(t)-y(t)|\ge \frac{c}{2\alpha }\cdot a\) for \(\tau \le t\le t_1\),
-
(3)
\(y_2(t)>x_{2}(t)\), for \(t\ge t_1\),
-
(4)
\(|x(t)-y(t)|\ge \dfrac{\sqrt{\alpha ^2-1}}{2\alpha ^2}ac\) for \(t\ge t_1\),
-
(5)
\(y_2(t)-x_{2}(t)\ge ap\) for \(t\ge \tau '\).
In particular, \(y(t)\ne x(t), \ t>0\).
Hence, at the time \(t_1\) the evader will be above the horizontal line where is the pursuer x. Thus, at the time \(t_1\) the pursuer x became “behind” the evader. Since \(v_2(t)\ge \alpha \cos \varphi _0\ge 1\ge u_{2}(t)\), then \(y_2(t)>x_{2}(t)\), for all \(t\ge t_1\).
If a-approach occurs with the pursuer x at a time \(\tau \), then the evader uses maneuver on \([\tau ,t_1]\) which ensures the inequality \(y_2(t_1)\ge x_{2}(t_1)\). Further, the strategy of the evader guarantees him the inequality \(y_2(t)>x_{2}(t)\) for all \(t\ge t_1\).
4 Conclusion
A simple motion evasion differential game of one pursuer and one evader whose control set is a sector has been considered in the plane. If \(\alpha \cos \varphi _0\ge 1\) and \(\alpha \sin \varphi _0>1\), then evasion from one pursuer has been presented. The strategy for the evader was constructed as well. Moreover, distances between the pursuer and evader have been estimated.
References
Azamov, A.: On a problem of escape along a prescribed curve. J. Appl. Math. Mech. 46(4), 553–555 (1982)
Azamov, A.A.: Fundamentals of Theory of Discrete Games. Niso Poligraf, Tashkent, Uzbekistan (2011)
Chernous’ko, F.L.: A problem of evasion from many pursuers. Prikladnaya Matematika I Mekhanika 40(1), 14–24 (1976)
Chernousko, F.L., Zak, V.L.: On Differential Games of Evasion from Many Pursuers. J. Optim. Theory Appl. 46(4), 461–470 (1985)
Ibragimov, G.I., Salimi, M., Amini, M.: Evasion from many pursuers in simple motion differential game with integral constraints. Eur. J. Oper. Res. 218(2), 505–511 (2012)
Isaacs, R.: Control Optim. Differential Games: A Mathematical Theory with Applications to Warfare and Pursuit. Wiley, New York (1965)
Ivanov, R.P.: Simple pursuit-evasion on a compact convex set. Doklady Akademii Nauk SSSR 254(6), 1318–1321 (1980)
Kuchkarov, ASh: Solution of simple pursuit-evasion problem when evader moves on a given curve. Int. Game Theory Rev. 12(3), 223–238 (2010)
Petrov, N.N., Shchelchkov, K.A.: On the interrelation of two linear stationary evasion problems with many evaders. Vestn. Udmurtsk. Univ. Mat. Mekh. Komp. Nauki 3, 52–58 (2014)
Pontryagin, L.S.: Selected Works. Nauka, Moscow (1988)
Pshenichnii, B.N.: Simple pursuit by several objects. Cybern. Syst. Anal. 12(3), 145–146 (1976)
Zak, V.L.: On a problem of evading many pursuers. J. Appl. Math. 43(3), 456–465 (1978)
Acknowledgments
The authors would like to thank the referees for their helpful comments which improved and shortened arguments of the present paper. This research was partially supported by the Research Grant (RUGS) of the Universiti Putra Malaysia, No. 05-02-12-1868RU.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2016 Springer Science+Business Media Singapore
About this paper
Cite this paper
Alias, I.A., Mafdzot, S.A.S., Ibragimov, G. (2016). Simple Motion Evasion Differential Game of One Pursuer and One Evader. In: Kılıçman, A., Srivastava, H., Mursaleen, M., Abdul Majid, Z. (eds) Recent Advances in Mathematical Sciences. Springer, Singapore. https://doi.org/10.1007/978-981-10-0519-0_9
Download citation
DOI: https://doi.org/10.1007/978-981-10-0519-0_9
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-10-0517-6
Online ISBN: 978-981-10-0519-0
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)