
Abstract
Vehicle to vehicle, also known as a V2V communication using the light fidelity (LiFi) technology is about transmitting and receiving data wirelessly. The data is transmitted by modulating the light intensity given by a light source of the front vehicle, for instance from the vehicle’s tail lamp. The development of the V2V communication prototype is a proposed method on transmitting the data via optical communication in order to prevent the collision between two vehicles: front and rear vehicle. In this project, the LiFi transmitter has been developed which consist of the light emitting diode (LED) that is used as a source for data transmission and the LiFi receiver that was designed with the photodiode to receive the data. For this time, the experiments have been done in order to study the transmission rate of single character with multiple characters. The colors of the transmitter also effects the obtained result. The proposed communication system based on LiFi for vehicle to vehicle (V2V) is a cost-effective solution with high data rate capabilities.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
25.1 Introduction
The field of science and technology is moving swiftly toward its progress. The human being uses this technological change for the saving of time and comfort. Development ranges from wired to wireless communication; and human beings have taken one step upstairs in wireless communication and developed the light fidelity technology, LiFi. Harald Hass is known as LiFi’s father from Edinburgh University who in his TED talks (Sarkar et al. 2015) told of the existence of this technology. The essence of this technology, according to Hass, is the strength and ability of diodes emitting light. In the near future, LiFi is an emerging technology that uses visible light bandwidth for data transmission and is 10,000 times greater than the band used in Wi-Fi technology (Sarkar et al. 2015). Therefore, when vast numbers of users demand Wi-Fi, RF bandwidth is increasingly being used, resulting in a clogged signal. Usage of the LiFi system is the answer. The idea is to use light bulbs as a source for data transmission at our homes as shown in Fig. 25.1.

LiFi technology
Road collisions lead to loss of human lives. Such deaths are due to car accidents. Studies show that most collisions are due to the vehicle following being unaware of the vehicle’s actions ahead. Based on the Malaysian Institute of Road Safety Research (MIROS), almost 81% the road accidents happen are caused by the human behavior, 13% is because of road condition and only 6% is caused of vehicle problem. The most common accident that happens in Malaysia is the rear end accident.
If the vehicle ahead may interact with the rear vehicle, as seen in Fig. 25.2, the collision can be avoided. There are several techniques to incorporate such connectivity technology, i.e., 5.9 GHz dedicated short range connectivity (DSRC) wireless in which two vehicles can communicate at the 5.9 GHz frequency and the vehicular ad hoc network which is the implementation of MANETs in which two vehicles can communicate by wireless fidelity (Yang et al. 2004). Using LiFi is intended to introduce a network which is cost-effective and has a high data rate. Because high-intensity LED lights are already present in automobiles these lights can be used as LiFi transmitters. In vehicles using LiFi technology, the collision can be avoided by adding only cheap circuitry.

V2V communication
25.2 Literature
The visible light communication protocol applied to the V2V (vehicle to vehicle) network was developed by Ferraz and Santos (2015). The VLC makes low cost use of the white LED. LED has less energy required so replaced with tail and headlights and reduces the thermal damage, LED is preferred as high light due to its high bandwidth and immunity to electromagnetic source interference. The technique of Manchester Coding is used for transmission, because it is safe and reliable. The distance from the vehicles was 20 m.
Ergul et al. (2015) presented the VLC and its challenges. Therefore, VLC has a large bandwidth and a high data carrying capacity thousand times greater than the radio frequency spectrum. The paper stated that the device is effective in carrying up to 300 Mbps of data rate within 25 ft range.
Using visible light communication, Kim et al. (2012) examined the outdoor environmental situation faced by vehicle to vehicle contact. Head light and rear light used for saturation of the transmitter and a picture diode was used for receiver of the light signal. In daytime outdoor environmental conditions the total distance is 20 m range. Outdoor communication problems faced during observation, such as sunlight glare, distortion of the photo diode; increase contact range during the day. In this way, transmitter and receiver are implemented with filter design, error correcting and improving signal power.
Nachimuthu et al. introduced the design methodology of vehicle to vehicle contact using VLC (Abdulsalam et al. 2015). The transmitter is mounted on the front vehicle and a receiver on the rear vehicle is attached. The data received may be helpful in taking further action such as tracking the vehicle speed or preventing collision. The system consists of two main transmitter sections, and the receiver. Modulation is used to modulate the input signal and data is transmitted in 0’s and 1’s type (bulb flashes, i.e., on and off).
25.3 Methodology
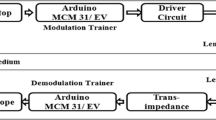
The system comprises of a transmitter section and a receiver section as shown in Fig. 25.3.

Block diagram of LiFi communication system
Vehicle A’s front lights act as transmitter at behind spot and send pulses of 0’s and 1’s. The flickering of LEDs should be done very quickly, so that the human eye cannot visualize it. The photodiode in the rear of vehicle B receives the data transmitted in current form at the front position. The system applies to scenario when vehicle A is within 5 m, front light transmits speed data to vehicle B to be processed and estimate the distance. The transmitter and receiver block are diagram shown in Figs. 25.4 and 25.5.

Block diagram of transmitter section

Block diagram of receiver section
For experiment sake, this project is conducted to find the time elapsed between the data during transmission. Serial print is used to define what kind of data will be sent. The data is processed by Arduino ATMEGA and is sent to the LED driver which provides a constant current to the LED. Serial print is a part of Arduino Window which can display when the data is transferred. The transmitted data from the LED is received by the photodiode at receiver section in the form of a current pulse. The received pulse is undetectable and very small. On detection, the received data is displayed on the Arduino window.
The transmitter design in the Fritzing software is shown in Fig. 25.6. The cable/USB is connected to the Arduino when the data is confirmed and be entered then the LED will be on and transmits the signal of single-character data. The purpose of the final transmitter circuit is to test the circuit design output before implementing in a real design.

Transmitter circuit design in Fritzing
The final receiver design in the Fritzing software is shown in Fig. 25.7. The character is shown by the Arduino serial monitor with time impulse. When the photodiode detects the photon, it produces the pulses of the current. It is tested using an input square wave supposedly.

Receiver circuit design in Fritzing
25.4 Result and Discussion
This section is an elaboration on the result and the discussion of the analysis. In each experimental analysis, all the analysis transmission is being run with a fast flick of the transmitter with a certain data (character), and the data is given into 2 kind of methods which are 2 data at the same time and 3 data at the same time. Then by using 2 type of transmitter sources, 2 of them are assigned with a parameter which is the distance from 30, 25, 20, 15, 10 and 5 cm for comparison. The data have been obtained from the Arduino serial monitor as shown in Fig. 25.8. The data at Arduino serial monitor were exported into a Microsoft excel data sheet to do a further analysis.

Data transmission of LiFi system in certain distance
Figure 25.9 is the result of the data that have been extracted from the spreadsheet and plotted on the graph for data analysis.

White receiver of 2 input at same time
Figure 25.10 displays the result of the extracted data from the table data sheet. The aim of this constructed graph is to study the gap of the time when the info or data that will be transmit to another party. Besides, to investigate the different color of the transmitter if there will be any clear difference. From that both graphs, the pattern between transmitter and receiver are very smooth and almost accurate based on the ordered data given. For example, the gradient between data 1 and 2 are very small, while the gap between data 2 and 3 are ramping in a short time because the data that being transmitted is not given continuously due to voltage fluctuating at LED and cause of the very fast flick in the LED itself. The pattern of the graph is quite similar even the source of the transmitter is of different color.

Distance comparison of 3 data
25.5 Conclusions
As a conclusion, the result obtained is achieving the necessity that should have in the transmission communication and the data that were sent by the transmitter to receiver had no data loss. Based on the result, the delay that happened during the data are being transmitted is in range of 0.011–0.014 s. As from result and discussion, the most suitable and recommended type is the white LED. The data shows that it has slightly higher accuracy than the red and the data will be more accurate when the distance is getting shorter. As for the recommendation, it is recommended for a further analysis to increase the value of data that can be given in the same time by do a study about LED driver to prevent voltage fluctuation. In addition, by increasing the voltage of the transmitter (LED) for getting a better and accurate data in a short time delay. An advanced array coding must be applied in order to prevent the data losses while processing the transmission.
References
Abdulsalam, N.A., Hajri, R.A., Abri, Z.A., Lawati, Z.A., Bait-Suwailam, M.M.: Design and implementation of a vehicle to vehicle communication system using Li-Fi technology. In: 2015 International Conference on Information and Communication Technology Research (ICTRC), pp. 136–139 (2015)
Ergul, O., Dinc, E., Akan, O.B.: Communicate to illuminate: State-of-the-art and research challenges for visible light communications. Phys. Commun. 17, 72–85 (2015)
Ferraz, P.A.P., Santos, I.S.: Visible light communication applied on vehicle-to-vehicle networks. In: 2015 International Conference on Mechatronics, Electronics and Automotive Engineering (ICMEAE), pp. 231–235
Jamali, A.A., Rathi, M.K., Memon, A.H., Das, B., Ghanshamdas, Shabeena, : Collision avoidance between vehicles through LiFi based communication system. IJCSNS 18(12), 81–87 (2018)
Kim, D., Yang, S., Kim, H., Son, Y., Han, S.: Outdoor visible light communication for inter- vehicle communication using controller area network. In: 2012 Fourth International Conference on Communications and Electronics (ICCE), pp. 31–34 (2012)
Sarkar, A., Agarwal, S., Nath, A.: Li-Fi technology: Data transmission through visible light. IJARCSMS 3(6), 1–10 (2015)
Yang, X., Liu, L., Vaidya, N.H., Zhao, F.: A vehicle-to-vehicle communication protocol for cooperative collision warning. In: The First Annual International Conference on Mobile and Ubiquitous Systems: Networking and Services. MOBIQUITOUS, pp. 114–123 (2004)
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Switzerland AG
About this paper

Cite this paper
Othman, N., Ideris, L.H., Hassan, Z.A.C. (2021). Small Scale Prototype Development of Vehicle to Vehicle (V2V) Communication Using the Light Fidelity (LiFi) Technology. In: Abu Bakar, M.H., Nurhidayat Zahelem, M., Öchsner, A. (eds) Progress in Engineering Technology III. Advanced Structured Materials, vol 148. Springer, Cham. https://doi.org/10.1007/978-3-030-67750-3_25
Download citation
DOI: https://doi.org/10.1007/978-3-030-67750-3_25
Published:
Publisher Name: Springer, Cham
Print ISBN: 978-3-030-67749-7
Online ISBN: 978-3-030-67750-3
eBook Packages: EngineeringEngineering (R0)