
Abstract
Light-emitting diodes (LEDs) can be used much more than lighting. Studies show that LEDs, which have been used just for machine-to-human interface, that is, either showing status of LED in printed circuit boards (PCBs) or illumination purposes, can also be used for communication between one hop and another at significantly low cost. LED has become a familiar technology for a variety of lighting applications, such as automotive, because of their superior efficiency and quality than halogen lamps. The process of transmission of data through light is termed as light fidelity (Li-Fi). Unlike wireless fidelity (Wi-Fi), which uses radio frequency, Li-Fi is a fifth-generation (5G) visible light communication (VLC) system which provides better capacity, efficiency, availability and security than Wi-Fi. By sending the data through light spectrum which comprises arrays of LED as an optical wireless medium act as signal propagation. In fact, the usage of LED eliminates the need of complex wireless networks and protocols. Exploiting minimal effort of lightning components and LEDs, there are a few windows of chances to utilize this medium, from open web source to get access, vehicle correspondence through road lights, which goes about as a free access point to self-sufficient cars that can impart through their headlights. This paper proposes the idea for vehicle-to-vehicle communication using light, which stimulates the way to pass data about driving conditions and driver behavior between automobiles. This enhances safe driving and makes road use more efficient.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others


Keywords
1 Introduction
Wi-Fi is not used in aircrafts, healthcare, and underwater communications due to electromagnetic waves that cause interference between the devices operating at same frequency and disrupt the communication between radio stations. Inter-vehicle communication is used to communicate between two vehicles and to analyze the pattern of signals so that smart and secure transportation system is achieved. The vehicles could form a mobile ad hoc network among several vehicles that have communication devices [1]. Each vehicle is equipped with a communication device within a decentralized network and can act not only as a communication node but also as a wireless router. The ad hoc network is a temporary network that is created by the absence of any centralized or pre-established infrastructure. This transforms each taking an interest vehicle into a remote wireless switch or hub, permitting vehicle, around 100–300 m of each other to associate and, thus, make a bunch of network system with a scenic. When the signals range is far from the network range then current vehicle drops out of the flag range and different vehicles can participate, interfacing vehicles to each other with the goal that a versatile web connection is made. The advantages of using light signals over other approaches are that they don’t need the complex management and processing of signals from hundreds or thousands of cars in the area, rather in the vicinity of the front and rear vehicle. This makes the communication suitable for real-time control function of vehicle [2]. This innovation attempts to create electronic security advancements, for example, vehicle-to-vehicle separate control, helped stopping, path changing, side and back cautions, and comfort advances, for example, all-around-perception, head-up show, and driver state checking to maintain a strategic distance from impacts. Photovoltaic cells be a replacement for windows of the cars, the system can be made to run independent with the power being supplied with the available solar energy. Based on the LEDs ON and OFF be responsible for the distinctive series of 0s and it is conceivable to encode information in the light by changing the rate at which the LEDs glimmer. At the point when LED is on, it transmits 1s and generally 0s. The LED power is regulated so quickly that human eyes can’t see, so the yield seems steady and subsequently offering lasting network. These quick exchanging can be accomplished by PWM method to transmit computerized information stream containing strings. To get this, we are customizing the microcontroller to shift the obligation cycle of the pulse width modulation (PWM) technique which has the assignment of directing the current in the LED. The one-sided ebb and flow is nourished to LED driver unit. The energy of LED is changed by the waveform of information flag. At the collector side photodiode sensor creates a present relative to the momentary power already obtained. From this, data can be filtered that can be used to control application systems like motor, lamp and relay, provide internet connectivity and so on [3]. The system can be employed using existing vehicle electronic device management such as controller area network (CAN) bus control signals because of phase-shifting nature of LED. It is important to manufacture the LED with proper analysis of power, control, data transmission and detection signals for efficient performance of devices. Coordinate observable pathway is not essential for Li-Fi to transmit a flag signal, since light reflected off the dividers can likewise accomplish an estimated speed of 70 Mbps.
2 Literature Review
The term Li-Fi was coined by professor Dr. Harald Hass at TED global talk in 2011, where he surprised audience by streaming high-quality video from a standard LED lamp. His observation alluded to this light signal as D-light that can be utilized to create information on data rates higher than 10 Mbps, which is significantly faster than our normal averaged broadband connections. Muntazir Mohd Tali et al. in their paper elaborate about the light communication, image processing, symbol recognition and wireless communication using Zigbee [4]. Saito et al. describe the road-to-vehicle communication and implemented using LED transmitter and camera receiver, which employs a special complementary metal-oxide semiconductor (CMOS) image sensor [5]. Vaishali et al. propose to use space–time division multiple access (STDMA) for real-time data traffic between vehicles, which was investigated using highway road simulation scenario with promising results [6]. Thangadurai et al. discuss about the general working and construction of Li-Fi along with the comparisons of Wi-Fi and Li-Fi and applications of Li-Fi [7, 8]. Jia-yuan et al. in their paper make use of certain algorithm and show two scenarios using NPN switching circuit and ASCII conversion [9, 10]. Several research works have been carried out on working mechanism of Li-Fi on how it provides better bandwidth, efficiency and better availability and security and on how it has immense possibilities comparing with other wireless communication mediums; but only a few researches have been carried out on practical implementation of Li-Fi. Research has been done on how Li-Fi can be used in illumination and data transmission between devices and also for transportation. The reviewed papers depict about the existing trends and how light fidelity can significantly make a global impact toward better innovation. There are many existing applications where it can be used, such as home internet, aviation, underwater communication, medical centers, but the research is still going on about the technology. Similarly, some papers highlight the use of LED in traffic lights. The fundamental idea about Li-Fi comprises an overhead light fitted with an LED and flag handling innovation which streams information implanted in its beam at very high to the photograph indicator. A collector dongle at that point changes over from amplitude to electrical signals with little changes, which is then changed over once more into an information stream and transmitted to a PC or a cell phone.
3 Working Principle
An LED light fitted with signal processing technology is used to stream data at ultra-high speeds to the photo detector. In every vehicle the LED lights act as transmitter and beneficiary in both rear and front sides of the vehicle. The LEDs are situated in both the side front and back-lights of the car which also contain the photo detector to locate and get the light signal.
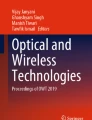
The transmitter and receiver, as shown in Fig. 1, are the two major parts in the Li-Fi system. By using the LED array signals output in the form of 0 and 1s, when the bulb flashes the transmitter part modulates the input signal with the required time period. The output will be presented when the beneficiary part finds these flashes using a photodiode and increases the flag. Consequently, all that required is a few LEDs and a controller that is used to code information into those LEDs. Each of the one needs to do is to fluctuate the defer rate at which the LEDs glimmer contingent on the information need to encode. Assist improvements can be made in this technique for parallel information transmission, or using blends of red, green and blue LEDs to modify the light’s recurrence with every recurrence encoding an alternate information channel.

General working principle
4 Proposed System
The existing system makes use of light detection and ranging (Lidar) and computer vision technique to detect the information about millions of small points surrounding the vehicle every second. Li-Fi is used because it is a fast and secured version of Wi-Fi and it is more cost-effective and sustains life-term goal. It uses VLC channel that has spectrum 10,000 times the entire RF spectrum. The major advantages of Li-Fi over the existing system are better bandwidth, working in areas that are susceptible to electromagnetic interference and offering higher transmission speeds. The vehicles used are self-driven and the headlights which already exist can be modified a little and can be used for communication. These schemes use less power and operate in low cost. The system implementation consists of two vehicles in line of sight. The implementation, as shown in Figs. 2 and 3, provides a scenario where car1 is functioned as transmitter and car2 as receiver.

Transmitting circuit in vehicle

Receiving unit in vehicle
The speed sensor senses the data to the controller, which will compare between current and previous speed of transmitting car and if it is decreased, it has a keen senses that when brake applied in car the data will be transmitted to LED driver, which also produces constant current to protect LED. The data along with unique vehicle id will be transmitted wirelessly to photodiode through light in the form of current so that another vehicle can identify the source. From another vehicle, the speed information can be received by photodiode to perform necessary action accordingly, like decrease its speed to avoid collision. So also, trigger circuit will detect the adjustment in path of vehicle and illuminate the transmitting circuit, regardless of whether the car is turning left or right. The distance between two vehicles can be calculated from ultrasonic sensor, which is used to sense the time interval to send the signal and receive the echo for the signal. The distance between the vehicles can be apparently calculated as:
Distance = Speed of sound × time taken/2; Speed of sound in air is 344 m/s.
The modulation technique used is on–off keying (OOK). The voltage is varying from 0 to 5 V which represents the information from the data source. Other sensors like infrared (IR), pressure, temperature, gyroscope, altimeter can also be integrated accordingly. A camera can also be integrated in front vehicle as shown in Fig. 4, which can capture traffic signals and symbols so that the required information can be transferred to other following vehicles using Li-Fi. Autonomous vehicles can also make use of GPS, radar and sensors to accurately measure vehicle’s orientation and rotation of its wheels to recognize the exact location.

Real-time scenario of Li-Fi between two vehicles
Because of line of sight (LOS) feature of Li-Fi, transmission of data from one vehicle to another takes place easily. A huge communication network has been formed when each and every single vehicle will transmit information from one to another through LOS. When former vehicle wants to make a turn, it will glow its indicator and the car behind it will capture image with camera using image processing techniques. When any symbol is recognized, the vehicle doing so will send the message to the other vehicles alerting them. This will assure help in maintaining road ethics and will provide safety of the drivers giving warning to them. Similarly, other sensors such as alcohol, eye-blink sensors can be added for piloted vehicles to sense the particular entity and take suitable action. At the same time, if accident happens, relay is turned off, so that ignition of the vehicle is deactivated.
Transmitter:
where LED power transmitted averages is represented as Pt, m0 = optical modulation index (OMI) of LED, X(t) = OOK signal.
Receiver:
Background noise is one of the major noise which is received along with the signal that affects it in the channel. Received light signal is given as:
where OOK signal = X(t); DC gain of channel is represented by h; and additive white Gaussian noise (AWGN) = n(t).
The converted electrical form signal from optical signal is
The ratio of the desired output signal power to the supplied input noise power is known as signal-to-noise ratio (SNR) and is represented as
where desired signal power = S; total AWGN = N.
where light signal received power is Pr and photo detector responsively is R
Equation (7) gives the calculated total noise as
where 1.602 × 10−19 C is constant electronics charge q; bandwidth of the system B, Boltzmann’s constant k, absolute temperature Tk, voltage gain G, Ƞ = fixed capacitance of PD per unit area, Γ = field effect transistor (FET) channel noise factor, gm = FET trans-conductance, area of the PD is Ar, noise bandwidth factor I2 for background noise and I3 = 0.0868.
5 Limitation and Future Scope
The signal can be blocked because of fog or there may be too much light ‘noise’ in summer, making camera difficult to pick up the signals. One of the issues the researchers are facing is to make system perform effectively in all lighting and weather conditions. As the LED is an opto-electronic device, other instruments also need to be deployed to measure and manage these effects. Some exceptions could be managed in software used for the control functions being fed by the signals. The system could be further enhanced for autonomous vehicles. VLC seems like a pragmatic and relatively straightforward technology to adopt across the automotive market, allowing some of the benefits to be introduced at an early stage as it is in fact complimentary to these approaches. It seems there is a great opportunity to improve road safety, vehicle efficiency and traffic management by simply extending the capabilities and features that already exist on many current vehicle designs, while other vehicle-to-vehicle (V2V)-enabled driver aids will come later as more complicated systems are developed. More refined procedures could significantly build VLC information rates. Concentrating on parallel information transmission utilizing varieties of LEDs like arrays or blend of LEDs to change light’s frequency, Li-Fi will make our lives innovative urge in the near future. Li-Fi technology is more costly at initial stages that can be minimized to some extent, and then this concept can be widely used for auto-piloted vehicles.
6 Conclusion
We have presented characteristics and capacities of V2V applications which mainly focused on Li-Fi transmitter and recipient. In rush hour gridlock signals, Li-Fi can be utilized to communicate with the LED lights of the cars, and mischance accidents can be diminished. Li-Fi is perfect for high thickness scope in a restricted area. It is trusted that the innovation can yield a speed which exceeds 10 Gigabits for each second (Gbps). It is the quickest and least expensive remote correspondence which is reasonable for long separation correspondence. Li-Fi will make all lives more innovation-driven sooner rather than the later. Eco-friendly transmission is feasible through light fidelity.
References
Charahte DV, Wagh PR, Avhad PV, Mankar SV, Mankar NS (2016) Design of vehicle to vehicle data transmission application using Li-Fi technology. IOSR J Comput Eng 26–29
Mali SU, Shinde SS (2017) Vehicle to Vehicle Communication. Int J Sci Res 6(3)
Ng SC, Zhang W, Zhang Y, Yang Y (2011) Analysis of access and connectivity probablities in vehicular relay network. IEEE J Sel Areas Commun 29(3):140–150
Tali MM, Patil A, Chavan S, Jadhav S (2017) Inter-vehicle communication using Li-Fi technology. Int J Adv Res Comput Commun Eng 6(3)
Saito T, Haruyama S, Nakagawa M (2014) A new tracking method using image sensor and photo diode for visible light road-to-vehicle communication. In: Proceedings of the 10th international conference on advanced communication technology 1, pp 673–678
Khairnar VD, Kotecha K (2013) Performance of vehicle-to-vehicle communication using IEEE 802.11p in vehicular Ad-Hoc network environment. Int J Netw Secur Its Appl 5(2)
Sharma RR, Sanganal A (2014) LI-FI technology transmission of data through light. Int J Comput Technol Appl 5(1):150–154
Thangadurai N, Dhanasekaran R, Karthika RD (2013) Dynamic traffic energy efficient topology based routing protocol for wireless ad hoc sensor networks. Int Rev Comput Softw 8(5):1141–1148
Jia-yuan W, Nian-yu Z, Dong W, Kentaro I, Zensei I, Yoshinori N (2012) Experimental study on visible light communication based on led. J China Univ Posts Telecommun 19(2):197–200
Kumar N, Terra D, Lourenco N, Alves LN, Aguiar RL (2011) Visible light communication for intelligent transportation in road safety applications. In: Proceedings of the 7th international wireless communication mobile computing conference, pp 1513–1518
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2020 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Agrawal, R., Thangadurai, N. (2020). Future of Smart Vehicle Communication by Using Li-Fi Technology. In: Kadambi, G., Kumar, P., Palade, V. (eds) Emerging Trends in Photonics, Signal Processing and Communication Engineering. Lecture Notes in Electrical Engineering, vol 649. Springer, Singapore. https://doi.org/10.1007/978-981-15-3477-5_2
Download citation
DOI: https://doi.org/10.1007/978-981-15-3477-5_2
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-3476-8
Online ISBN: 978-981-15-3477-5
eBook Packages: Physics and AstronomyPhysics and Astronomy (R0)