
Abstract
In this chapter, we discuss Stepanov-like almost automorphic function in the framework of impulsive systems. Next, we establish the existence and uniqueness of such solution of a very general class of delayed model of impulsive neural network. The coefficients and forcing term are assumed to be Stepanov-like almost automorphic in nature. Since the solution is no longer continuous, so we introduce the concept of piecewise continuous Stepanov-like almost automorphic function. We establish some basic and important properties of these functions and then prove composition theorem. Composition theorem is an important result from the application point of view. Further, we use composition result and fixed point theorem to investigate existence, uniqueness and stability of solution of the problem under consideration. Finally, we give a numerical example to illustrate our analytical findings.
Access provided by Autonomous University of Puebla. Download chapter PDF
Similar content being viewed by others

Keywords
- Stepanov-like almost automorphic functions
- Composition theorem
- Impulsive differential equations
- Fixed point method
- Asymptotic stability
4.1 Introduction
The introduction of almost periodic functions (AP) by H. Bohr [11] in the year 1924–1925 led to various important generalizations of this concept. One important generalization is the concept of almost automorphic function (AA) given by S. Bochner [10]. This concept is further generalized to several other concepts out of which one important generalization is the concept of Stepanov-like almost automorphic function introduced by N’Guérékata and Pankov [21]. Several authors have discussed several classes of almost automorphic functions and their extensions with application to differential equations [13, 14, 20]. It has been observed that one of the natural questions in the field of differential equations is: if the forcing function possesses a special characteristic, then whether the solution possesses the same characteristic or not? Motivated by this many researchers have studied the existence of Stepanov-like almost automorphic solutions of differential equations (see, for example, [14, 20] and the references therein). While studying the behaviour of many physical and biological phenomena, it has been observed that many phenomenons exhibit regularity behaviour which is not exactly periodic. These kind of phenomenons can be modelled by considering more general notions such as almost periodic, almost automorphic, or Stepanov-like almost automorphic. We have the following inclusion AP ⊂ AA u ⊂ AA ⊂ BC, where AA u stands for uniformly almost automorphic and BC is the space of bounded and continuous functions. If we consider the class of Stepanov-like almost automorphic, then it covers more functions than almost automorphic functions. So, if the underlying behaviour of the systems is not almost automorphic, it may be possible that it is Stepanov-like almost automorphic or it belongs to other more general class of functions. For more work on Stepanov-like almost automorphic and its generalizations, we refer to [2, 4, 15, 16] and the references therein.
Impulsive differential equations involve differential equations on continuous time interval as well as difference equations on discrete set of times. It provides a real framework of modelling the systems, which undergo through abrupt changes like shocks, earthquake, harvesting, etc. Recent years have seen tremendous work in this area due to its applicability in several fields. There are few excellent monographs and literatures on impulsive differential equations [7,8,9, 19, 24]. As we know that impulses are sudden interruptions in the systems, in neural case, we can say that these abrupt changes are in the neural state. Its effect on humans will depend on the intensity of the change. In signal processing, the faulty elements in the corresponding artificial network may produce sudden changes in the state voltages and thereby affect the normal transient behaviour in processing signals or information. Neural networks have been studied extensively, but the mathematical modelling of dynamical systems with impulses is very recent area of research [1, 3, 5, 6, 25,26,27,28,29,30,31].
To the best of our knowledge, the existences, uniqueness and stability of Stepanov-like almost automorphic solution of impulsive differential equations is rarely discussed. In this work, we introduce piecewise continuous Stepanov-like almost automorphic function. We prove composition theorem, which is very important result. As an application we study the existence, uniqueness and stability of Stepanov-like almost automorphic solution of the following impulsive delay differential equations arising from neural network modelling,
where \(a_{ij},\alpha _{ij},\beta _{ij},f_{j},\gamma _{i}\in \mathcal {C}(\mathbb {R},\mathbb {R})\) for i = 1, 2, ⋯ , n, j = 1, 2, ⋯ , n. The coefficient \(A_{k}\in \mathbb {R}^{n\times n},\) the function \(I_{k}(x)\in \mathcal {C}(\Omega ,\mathbb {R}^{n})\) and the constant \(\gamma _{k}\in \mathbb {R}^{n}.\) The symbol Ω denotes a domain in \(\mathbb {R}^{n}\) and \(\mathcal {C}(X,Y)\) denotes the set of all continuous functions from X to Y.
The organization of this work is as follows: In Sect. 4.2, we give some basic definitions and results. In Sect. 4.3, we establish composition theorem. In Sect. 4.4, we study existence and stability of piecewise continuous Stepanov-like almost automorphic solutions of impulsive differential equations with delay. In Sect. 4.5, we present an example with numerical simulation.
4.2 Preliminaries
Throughout the manuscript, the symbol \(\mathbb {R}^n\) denotes the n dimensional space with norm \(\|x\|=\max \{|x_i|;i=1,2,\cdots ,n\}.\) We denote \(PC(\mathbb {J}, \mathbb {R}^n),\) space of all piecewise continuous functions from \(J \subset \mathbb {R}\) to \(\mathbb {R}^n\) with points of discontinuity of first kind t k where it is left continuous.
For smooth reading of the manuscript, we first define the following class of spaces,
-
\(S^{p}AA_{pc}(\mathbb {R}, \mathbb {R}^n) = \Big \{\phi \in PC(\mathbb {R}, \mathbb {R}^n): \phi \ \mbox{is a piecewise continuous Stepanov-} \ \\ \quad \quad \ \mbox{like almost automorphic function} \ \Big \}\)
-
\(S^{p}AA_{pc}(\mathbb {R}\times \mathbb {R}^n, \mathbb {R}^n) = \Big \{\phi \in PC(\mathbb {R}\times \mathbb {R}^n, \mathbb {R}^n): \phi \ \mbox{is a piecewise continuous } \ \\ \quad \quad \ \mbox{Stepanov-like almost automorphic function} \ \Big \}\)
-
\(S^{p}AAS(\mathbb {Z}, \mathbb {R}) = \Big \{\phi :\mathbb {Z}\rightarrow \mathbb {R}: \phi \ \mbox{is a Stepanov-like almost automorphic } \ \\ \quad \quad \ \mbox{sequence} \ \Big \}\)
Note that the definition of almost automorphic operator is given by N’Gu\(\acute {e}\)r\(\acute {e}\) kata and Pankov [22]. Now we give the following definitions in the framework of impulsive systems motivated by the work of [12, 17, 28].
Definition 4.2.1 ([18])
A function \(f \in PC(\mathbb {R},\mathbb {R}^{n})\) is called a PC-almost automorphic if
-
(i)
sequence of impulsive moments {t k} is an almost automorphic sequence,
-
(ii)
for every real sequence (s n), there exists a subsequence \((s_{n_k})\) such that \(g(t)=\lim _{n\to \infty }f(t+s_{n_k})\) is well defined for each \(t\in \mathbb {R}\) and \(\lim _{n\to \infty }g(t-s_{n_k})=f(t)\) for each \(t\in \mathbb {R}.\)
We denote \(AA_{pc}(\mathbb {R},\mathbb {R}^{n})\) the set of all such functions.
Definition 4.2.2 ([18])
A function \(f \in PC(\mathbb {R}\times \mathbb {R}^{n},\mathbb {R}^{n})\) is called PC-almost automorphic in t uniformly for x in compact subsets of X if
-
(i)
sequence of impulsive moments {t k} is an almost automorphic sequence,
-
(ii)
for every compact subset K of X and every real sequence (s n), there exists a subsequence \((s_{n_k})\) such that \(g(t,x)=\lim _{n\to \infty }f(t+s_{n_k},x)\) is well defined for each \(t\in \mathbb {R}\), x ∈ K and \(\lim _{n\to \infty }g(t-s_{n_k},x)=f(t,x)\) for each \(t\in \mathbb {R}\), x ∈ K.
We denote \(AA_{pc}(\mathbb {R}\times \mathbb {R}^{n},\mathbb {R}^{n})\) the set of all such functions.
Definition 4.2.3
A sequence of continuous functions, \(I_k: \mathbb {R}^{n} \to \mathbb {R}^{n}\) is almost automorphic, if for integer sequence \(\{k_n^{\prime } \}\), there exist a subsequence {k n} such that \(\lim _{n\to \infty }I_{(k+k_n)}(x) = I_k^*(x)\) and \(\lim _{n\to \infty }I_{(k-k_n)}^*(x) = I_k(x)\) for each k and x ∈ X.
Definition 4.2.4
A bounded sequence \(x:\mathbb {Z}^+ \to \mathbb {R}^{n}\) is called an almost automorphic sequence, if for every real sequence \((k_{n}^{\prime })\), there exists a subsequence (k n) such that y(k) =limn→∞x(k + k n) is well defined for each \(m\in \mathbb {Z}\) and limn→∞y(k − k n) = x(k) for each \(k\in \mathbb {Z}^+\). We denote \(AAS(\mathbb {Z}, \mathbb {R}^{n}),\) the set of all such sequences.
Definition 4.2.5 ([23])
The Bochner transform f b(t, s), \(t\in \mathbb {R}\), s ∈ [0, 1] of a function \(f: \mathbb {R} \to \mathbb {R}^{n}\) is defined by f b(t, s) := f(t + s).
Definition 4.2.6 ([23])
Let p ∈ [1, ∞). The space \(BS^p(\mathbb {R}^{n})\) of all Stepanov bounded functions, with the exponent p, consists of all measurable functions f on \(\mathbb {R}\) with values in \(\mathbb {R}^{n}\) such that \(f^b\in L^\infty \big (\mathbb {R}, L^p((0,1), d\tau )\big )\). This is a Banach space when it is equipped with the norm defined by
Definition 4.2.7
A bounded piecewise continuous function \(f \in PC(\mathbb {R}, \mathbb {R}^n)\) is called a piecewise continuous Stepanov-like almost automorphic if
-
(i)
sequence of impulsive moments {t k} is a Stepanov-like almost automorphic sequence,
-
(ii)
for every real sequence (s′ n), there exists a subsequence (s n) such that
$$\displaystyle \begin{aligned} \lim_{n\to\infty}\left(\int_0^1\|f(t+s_n+s)-g(t+s)\|{}^pds\right)^{\frac{1}{p}} = 0 \end{aligned}$$is well defined for each \(t\in \mathbb {R}\) and
$$\displaystyle \begin{aligned} \lim_{n\to\infty}\left(\int_0^1\|g(t-s_n+s)-f(t+s)\|{}^pds\right)^{\frac{1}{p}} = 0 \end{aligned}$$for each \(t\in \mathbb {R}\).
The space of all such functions is denoted by \(S^{p}AA_{pc}(\mathbb {R}, \mathbb {R}^n)\).
Definition 4.2.8
A bounded piecewise continuous function \(f \in PC(\mathbb {R}\times \mathbb {R}^n, \mathbb {R}^n)\) is called a piecewise continuous Stepanov-like almost automorphic in t uniformly in x in compact subsets of \(\mathbb {R}^n\) if
-
(i)
the sequence of impulsive moments {t k} is a Stepanov-like almost automorphic sequence,
-
(ii)
for every compact subset K of \(\mathbb {R}^n\) and every real sequence (s′ n), there exists a subsequence (s n) such that
$$\displaystyle \begin{aligned} \lim_{n\to\infty}\left(\int_0^1\|f(t+s_n+s,x)-g(t+s,x)\|{}^pds\right)^{\frac{1}{p}} = 0 \end{aligned}$$is well defined for each \(t\in \mathbb {R}\) and
$$\displaystyle \begin{aligned} \lim_{n\to\infty}\left(\int_0^1\|g(t-s_n+s,x)-f(t+s,x)\|{}^pds\right)^{\frac{1}{p}} = 0 \end{aligned}$$for each \(t\in \mathbb {R}\).
The space of all such functions is denoted by \(S^{p}AA_{pc}(\mathbb {R}\times \mathbb {R}^n, \mathbb {R}^n).\)
Definition 4.2.9
A bounded sequence \(x:\mathbb {Z}^+ \to \mathbb {R}^n\) is called Stepanov-like almost automorphic if for every real sequence (k′ n), there exists a subsequence (k n) and a sequence \(y:\mathbb {Z}^+ \to \mathbb {R}^n\) such that
is well defined for each \(m\in \mathbb {Z}\) and
for each \(m\in \mathbb {Z}^+.\)
We denote \(S^{p}AAS(\mathbb {Z}^+,\mathbb {R}^n),\) the set of all such sequences.
We finish this section by defining few examples of Stepanov-like almost automorphic functions below.
-
(i)
Consider \(x=(x_n)_{n\in \mathbb {Z}},\) an almost automorphic sequence and the function:
$$\displaystyle \begin{aligned} a(t)= \begin{cases} x_n,\quad t \in (n-\epsilon,n+\epsilon), n \in \mathbb{Z}, \\ 0, \quad \ \mbox{otherwise} \ \end{cases} \end{aligned}$$ -
(ii)
$$\displaystyle \begin{aligned} b(t)= \begin{cases} \sin \Big(\frac{1}{2+\sin{}(n)+\sin{}(\sqrt{2}n)}\Big),\quad t \in \left(n-\frac{1}{4},n+\frac{1}{4}\right), n \in \mathbb{Z}, \\ 0, \quad \ \mbox{otherwise} \ \end{cases} \end{aligned}$$
-
(iii)
$$\displaystyle \begin{aligned} c(t)= \begin{cases} \cos \Big(\frac{1}{2+\cos{}(n)+\cos{}(\sqrt{2}n)}\Big),\quad t \in \left(n-\frac{1}{4},n+\frac{1}{4}\right), n \in \mathbb{Z}, \\ 0, \quad \ \mbox{otherwise} \ \end{cases} \end{aligned}$$
4.3 Composition Theorem
Lemma 4.3.1
Let \(I_k: \mathbb {R}^n \to \mathbb {R}^n\) be a sequence of Stepanov-like almost automorphic functions and \(K \subset \mathbb {R}^n\) be a compact subset. If I k satisfies Lipschitz condition on \(\mathbb {R}^n\) , i.e.
then the sequence {I k(x) : x ∈ K} is Stepanov-like almost automorphic.
Proof
Since I k is Lipschitz continuous over a compact set K, its range is also compact. Hence every sequence \(I_{k+k_n}(x)\) has a convergent subsequence. So using the fact that I k is Stepanov almost automorphy, the Stepanov almost automorphy of I k(x) for x ∈ K is ensured. □
Lemma 4.3.2
Let \(I_k: \mathbb {R}^n \to \mathbb {R}^n\) be a sequence of Stepanov-like almost automorphic functions and \(\phi \in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n).\) If I k satisfies Lipschitz condition on \(\mathbb {R}^n\) , i.e.
then the sequence {I k(ϕ(t k))} is Stepanov-like almost automorphic.
Proof
Since I k is a sequence of Stepanov-like almost automorphic functions, there exists \(I_k^*\) such that \(I_{k+k_n}(x(t_{k}))\rightarrow I_{k}^*(x(t_{k}))\) and \(I^*_{k-k_n}(x(t_{k}))\rightarrow I_{k}(x(t_{k})).\) By the above property and Lipschitz continuity of I k, we obtain
Using Lemma 4.3.1 and the above expression (4.3.1), the sequence {I k(ϕ(t k))} is Stepanov-like almost automorphic. □
Lemma 4.3.3
If \(f, f_1, f_2 \in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n),\) then the following are true:
-
(i)
\(f_1+f_2 \in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n),\)
-
(ii)
\(cf \in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n)\)for any scalar c,
-
(iii)
\(f_a(t)-f(t+a) \in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n)\) for any \(a \in \mathbb {R},\)
-
(iv)
\(R_f=\{f(t): t \in \mathbb {R}\}\) is relatively compact.
Proof
Proof of (i), (ii), (iii) is obvious from definition of Stepanov-like almost automorphic function. For the proof of (iv) consider a sequence f(t + s′ n) ∈ R f, then using definition of Stepanov-like almost automorphic function, there exists a function g such that \(\lim _{n\to \infty }(\int _0^1\|f(t+s_n+s,x)-g(t+s,x)\|ds)^{\frac {1}{p}} = 0.\) And hence R f is relatively compact. □
Now we prove our main result of this section.
Lemma 4.3.4 (Composition Theorem)
Let \(f\in S^{p}AA_{pc}(\mathbb {R}\times \mathbb {R}^n,\mathbb {R}^n)\) is uniformly continuous with respect to x on any compact subset of \(\mathbb {R}^n.\) If \(\phi \in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n),\) then \(f(\cdot , \phi (\cdot ))\in S^{p}AA_{pc}(\mathbb {R},\mathbb {R}^n).\)
Proof
From the assumption f is uniformly continuous with respect to x on any compact subset of \(\mathbb {R}^n, i.e.\) for 𝜖 > 0, there exists δ > 0 such that ∥x − y∥ < δ ⇒∥f(⋅, x) − f(⋅, y)∥ < 𝜖.
Also, the range of function ϕ is relatively compact, i.e. \(K=\overline {\{\phi (t): t \in \mathbb {R}\}}\) is compact and hence there exists a finite number of open balls O k, k = 1, 2, ⋯ , n centred at \(x_k \in \{\phi (t): t \in \mathbb {R}\}\) with radius δ such that
Define B k such that
and set
Consider a step function \( \bar {x} : \mathbb {R}^{n} \to \mathbb {R}^{n} \) by
Further using the definition of Stepanov-like almost automorphy of f and ϕ, that is for each sequence {s′ n} there exist subsequence {s n} and functions g and ψ such that
and
Calculating the Stepanov norm of f, we have
Using Eqs. (4.3.2) and (4.3.3), we obtain
Similarly
Hence f(⋅, ϕ(⋅)) is Stepanov almost automorphic. □
4.4 Impulsive Delay Differential Equations
We can easily see that the Eq. (4.1.1) can be written in the following compact form:
where A(t) = (a ij(t))nxn, i, j = 1, 2, ⋯ , n, f = (f 1, f 2, ⋯ , f n)T and
for i = 1, 2, ⋯ , n. In order to prove our results, we need the following assumptions:
-
(H1)
The function \(A(t)\in \mathcal {C}(\mathbb {R},\mathbb {R}^{n})\) is a piecewise continuous Stepanov-like almost automorphic function,
-
(H2)
\(\det (I+A_{k})\neq 0\) and the sequences A k and t k are Stepanov-like almost automorphic.
It is well known that if U k(t, s) is the Cauchy matrix associated with the system
then the Cauchy matrix of the system (4.4.1) is given by
For the above Cauchy matrix, the solution of the corresponding homogenous system could be written as x(t, t 0, x 0) = U(t, t 0)x 0, where x 0 is the initial condition at the initial point t 0. Let us further assume the followings:
-
(H3)
There exist positive constants K and δ such that ∥U(t, s)∥≤ Ke −δ(t−s), which further implies that \( \|U(t+t_{n_{k}},s+t_{n_{k}})-U(t,s)\|\leq M\epsilon e^{-\frac {\delta }{2}(t-s)} \) for any 𝜖 > 0 and positive constant M.
-
(H4)
The functions α ij, β ij are Stepanov-like almost automorphic such that
$$\displaystyle \begin{aligned} \begin{array}{rcl} -\infty <{\alpha _{ij}}_{\ast }\leq \alpha _{ij}(t)\leq \alpha _{ij}^{\ast }<\infty , \quad \quad -\infty <{\beta _{ij}}_{\ast }\leq \beta _{ij}(t)\leq \beta _{ij}^{\ast }<\infty . \end{array} \end{aligned} $$ -
(H5)
The function f j is Stepanov-like almost automorphic with \(0<\sup _{t\in \mathbb {R}}f_{j}(t)<\infty \) and satisfies |f j(t) − f j(s)|≤ L j|t − s|, j = 1, 2, ⋯ , n.
-
(H6)
The function γ i is Stepanov-like almost automorphic and satisfies \(-\infty <{\gamma _{i}}_{\ast }\leq \gamma _{i}(t)\leq \gamma _{i}^{\ast }<\infty .\)
-
(H7)
The sequence I k is Stepanov-like almost automorphic and there exists a positive constant L such that \(\|I_{k}(x)-I_{k}(y)\|\leq L\|x-y\|, \ \mbox{for} \ k\in \mathbb {Z},x,y\in \Omega \subset \mathbb {R}^{n}.\)
Now we have made enough background to prove the main results of this paper, which are presented below.
Lemma 4.4.1
Under the properties of Cauchy matrix U(t, s), the impulsive differential Eq.(4.4.1) is equivalent to the following integral equation:
Proof
For t ∈ [0, t 1], we claim that the following function is the solution of system (4.1.1)
Differentiating both sides with respect to t, we get
For t ∈ (t 1, t 2], define
Differentiating both sides of the above relation with respect to t, we obtain
⋮
For t ∈ (t k, t k+1], define
Again differentiating both sides of the above relation with respect to t, we get
⋮
Similarly the result holds for any interval (t l, t l+1]. □
Lemma 4.4.2
If \(f:\mathbb {R}\rightarrow \mathbb {R}^{n}\) is a Stepanov-like almost automorphic function, then \(\int _{-\infty }^{t}U(t,s)f(s) ds +\sum _{t>t_{k}}U(t,t_{k}) I_{k}(x (t_{k}))\) is Stepanov-like almost automorphic.
Proof
Since f is Stepanov-like almost automorphic, for each sequence {t n} there exist a subsequence \(\{t_{n_k}\}\) and function g such that
We define
and
Using continuity of U(t, s) and Lebesgue’s dominated convergence theorem, we obtain
Moreover,
Thus using Eqs. (4.4.3) and (4.4.4), we get
Similarly, we can prove that
Hence F is piecewise Stepanov-like almost automorphic. □
Theorem 4.4.3
Under the hypotheses (H1)–(H7), there exists a unique piecewise continuous Stepanov-like almost automorphic solution of Eq.(4.1.1) provided
Proof
Define the operator
we denote \(B \subset S^{p}AA_{pc}(\mathbb {R}, \mathbb {R}^n),\) the set of all Stepanov-like almost automorphic functions satisfying \(\|\phi \|{ }_{S^p} \leq K_{1},\) where \(\|\phi \|{ }_{S^p} =\sup _{t\in \mathbb {R}}(\int _t^{t+1}\|\phi (s)\|{ }^pds)^{\frac {1}{p}}\) and \( K_{1}=KC\Big ((p\delta )^{-\frac {1}{p}}+(1-e^{-p\delta })^{-\frac {1}{p}}\Big ).\) Using composition theorem, it is not difficult to see that Λϕ is Stepanov-like almost automorphic as ϕ is Stepanov-like almost automorphic. As the function \( f\in S^{p}AA_{pc}(\mathbb {R}\times \mathbb {R}^{n},\mathbb {R}^n),\) define u(⋅) = f(⋅, x(⋅), x(⋅− α)). Again using composition Theorem 4.3.4 and Lemma 4.4.2, we conclude
Further using Stepanov-like almost automorphy of sequence \(I_{k}\in C(\mathbb {R}^n,\mathbb {R}^n),\) we obtain
Similarly
The above analysis implies \(\Lambda \phi \in S^{p}AA_{pc}(\mathbb {R}, \mathbb {R}^n).\)
Let us denote
where
Now first we calculate the norm of ϕ 0, which is as follows:
Hence for any ϕ ∈ B ∗, we get
Our next aim is to prove that Λ maps set B ∗ to B ∗.
In order to achieve this, let us first observe that
where \(L^{\ast }=\max \{L_{i},i=1,2,\cdots ,n\}.\) In order to have zero as an equilibrium solution of the system (4.1.1), we assume that f j(0) = I k(0) = 0. Thus we have

Thus we conclude that Λϕ ∈ B ∗.
Now we prove that Λ is a contraction. For any ϕ 1, ϕ 2 ∈ B ∗, we obtain
Using the assumptions, we obtain
Thus the mapping Λ is a contraction. Hence using Banach contraction principle, we conclude that there exists a unique piecewise continuous Stepanov-like almost automorphic solution of Problem (4.1.1). □
Our next theorem is about asymptotic stability of the system (4.1.1).
Theorem 4.4.4
Under the hypotheses (H1)–(H7), the solution of the system (4.1.1) is asymptotically stable provided
Proof
For any two solutions x(t) and y(t) of the system (4.1.1) with initial values x 0 and y 0, we define V (t) = x(t) − y(t). Using the property (∥x∥ + ∥y∥)p ≤ 2p−1(∥x∥p + ∥y∥p) and calculating p −th norm of V (t), we obtain
From the assumption
there exists an 𝜖 ∈ (0, δ) such that
We further define X(t) = ∥x(t) − y(t)∥pe 𝜖t. Integrating both sides of X(t), we obtain
Here i(0, τ) is the number of points t k in the interval (0, τ) and the product \(\prod _{0<t_k<\tau }\Big (1+\frac {2^{2p-2}K^pL^p}{p\delta - \epsilon }\Big ) = \Big (1+\frac {2^{2p-2}K^pL^p}{p\delta -\epsilon }\Big )^{i(0,\tau )}\) is convergent because of \(\Big (1+\frac {2^{2p-2}K^pL^p}{p\delta - \epsilon }\Big ) \leq \Big (1+L^p\Big )^{\frac {2^{2p-2}K^p}{p\delta - \epsilon }}.\) Since RHS of inequality (4.4.7) is independent of τ ∈ [0, T) as well as of T, and hence the LHS integral of inequality (4.4.7) exists in [0, ∞). In particular, we have
Eventually, the Stepanov-like almost automorphic solution is asymptotically stable. □
4.5 Examples
As an example of Problem (4.1.1), consider the following classical model of Hopefield neural network model,
where \(a_{i},f_{j},\gamma _{i}\in \mathcal {C}(\mathbb {R},\mathbb {R}),\ \alpha _{ij},\beta _{ij} \in \mathbb {R}\) for i = 1, 2, ⋯ , n, j = 1, 2, ⋯ , n. The coefficient \(A_{k}\in \mathbb {R}^{n\times n},\) the function \(I_{k}(x)\in \mathcal {C}(\Omega , \mathbb {R}^{n})\) and the constant \(\gamma _{k}\in \mathbb {R}^{n},\) where Ω a domain in \(\mathbb {R}^{n}.\) In this case our matrix A(t) is a diagonal matrix with diagonal entire − a 1(t), ⋯ , −a n(t). We assume that a i(t) are Stepanov-like almost automorphic and choose a i(t) = 1 for each i = 1, 2, ⋯ , n. One can easily verify the hypotheses (H1) and (H2) for this case and we assume the hypothesis (H3). Now under all the conditions of Theorem 4.4.3, there exists a Stepanov-like almost automorphic solution of the Problem (4.5.1).
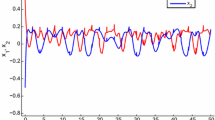
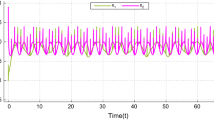
Let us choose the following set of parameters for the Problem (4.5.1) in \(\mathbb {R}^2\):
These parameters clearly satisfy the conditions of our Theorem 4.4.3. The graph of the solution of (4.5.1) corresponding to these parametric values is depicted in Fig. 4.1. It can be easily seen that the nature of the graph is Stepanov almost automorphic.

Stepanov-like almost automorphic solution of 4.5.1
4.6 Discussion
The class of Stepanov-like almost automorphic functions covers larger class of functions and hence more complicated behaviour can be expressed in terms of these functions. It already contains the class of almost periodicity, automorphy as a subclass and hence it is more general in nature. One natural question one can always ask in the neural network theory is that what will be the nature of the output when all the parameters are Stepanov-like almost automorphic. In this work, we answered this question under certain condition. The asymptotic stability of solution is also established under certain conditions on the parameters. One can easily see the truth of this claim in the numerical simulation section. The obtained results can be easily generalized to other general class of systems such as neutral system, integro-differential system and systems with deviated arguments.
References
S. Abbas, A note on Weyl pseudo almost automorphic functions and their properties. Math. Sci. (Springer), 6, 5 (2012). Art. 29
S. Abbas, Y.K. Chang, M. Hafayed, Stepanov type weighted pseudo almost automorphic sequences and their applications to difference equations. Nonlinear Stud. 21(1), 99–111 (2014)
S. Abbas, L. Mahto, M. Hafayed, A.M. Alimi, Asymptotic almost automorphic solutions of impulsive neural network with almost automorphic coefficients. Neurocomputing 144, 326–334 (2014)
S. Abbas, V. Kavitha, R. Murugesu, Stepanov-like weighted pseudo almost automorphic solutions to fractional order abstract integro-differential equations. Proc. Indian Acad. Sci. Math. Sci. 125(3), 323–351 (2015)
S. Ahmad, I.M. Stamova, Global exponential stability for impulsive cellular neural networks with time-varying delays. Nonlinear Anal. 69(3), 786–795 (2008)
W. Allegretto, D. Papini, M. Forti, Common asymptotic behavior of solutions and almost periodicity for discontinuous, delayed, and impulsive neural networks. IEEE Trans. Neural Netw. 21(7), 1110–1125 (2010)
B. Ammar, F. Cherif, A.M. Alimi, Existence and uniqueness of pseudo almost-periodic solutions of recurrent neural networks with time-varying coefficients and mixed delays. IEEE Trans. Neural Netw. Learning Sys. 23(1), 109–118 (2012)
D.D. Bainov, P.S. Simeonov, Systems with Impulsive Effects (Ellis Horwood Limited/John Wiley & Sons, Chichester, 1989)
D.D. Bainov, P.S. Simeonov, Impulsive Differential Equations: Periodic Solutions and Its Applications (Longman Scientific and Technical Group, England, 1993)
S. Bochner, Continuous mappings of almost automorphic and almost periodic functions. Proc. Nat. Acad. Sci. U.S.A. 52, 907–910 (1964)
H. Bohr, Almost-Periodic Functions (Chelsea Publishing Company, New York City, 1947)
A. Chavez, S. Castiallo, M. Pinto, Discontinuous almost automorphic functions and almost solutions of differential equations with piecewise constant argument. Electron. J. Differ. Equ. 2014(56), 1–13 (2014)
T. Diagana, Pseudo Almost Periodic Functions in Banach Spaces (Nova Science, Hauppauge, 2007)
T. Diagana, E. Hernndez, J.C. Santos, Existence of asymptotically almost automorphic solutions to some abstract partial neutral integro-differential equations. Nonlinear Anal. (71), 248–257 (2009)
V. Kavitha, S. Abbas, R. Murugesu, Existence of Stepanov-like weighted pseudo almost automorphic solutions of fractional integro-differential equations via measure theory. Nonlinear Stud. 24(4), 825–850 (2017)
H.X. Li, L.L. Zhang, Stepanov-like pseudo-almost periodicity and semilinear differential equations with uniform continuity. Results Math. 59(1–2), 43–61 (2011)
J. Liu, C. Zhang, Composition of piecewise pseudo almost periodic functions and applications to abstract impulsive differential equations. Adv. Differ. Equ. 2013(11), 21 (2013)
L. Mahto, S. Abbas, PC-almost automorphic solution of impulsive fractional differential equations. Mediterr. J. Math. 12(3), 771–790 (2014)
L. Mahto, S. Abbas, A. Favini, Analysis of Caputo impulsive fractional order differential equations with applications. Int. J. Differ. Equ. 2013, 1–11 (2013)
G.M. Mophou, G.M. N’Guérékata, On some classes of almost automorphic functions and applications to fractional differential equations. Comput. Math. Appl. 59, 1310–1317 (2010)
G.M. N’Guérékata, Topics in Almost Automorphy (Springer, New York, 2005)
G.M. N’Guérékata, A. Pankov, Integral operators in spaces of bounded, almost periodic and almost automorphic functions. Differ. Integral Equ. 21(11–12), 1155–1176 (2008)
A. Pankov, Bounded and Almost Periodic Solutions of Nonlinear Operator Differential Equations (Kluwer, Dordrecht, 1990)
A.M. Samoilenko, N.A. Perestyuk, Differential Equations with Impulse Effects (Viska Skola, Kiev, 1987) (in Russian)
R. Samidurai, S.M. Anthoni, K. Balachandran, Global exponential stability of neutral-type impulsive neural networks with discrete and distributed delays. Nonlinear Anal. Hybrid Syst. 4(1), 103–112 (2010)
M. Sannay, Exponential stability in Hopfield-type neural networks with impulses. Chaos, Solitons Fractals 32(2), 456–467 (2007)
G.T. Stamov, Impulsive cellular neural networks and almost periodicity. Proc. Jpn. Acad. Sci. 80, Ser. A, 10, 198–203 (2005)
G.T. Stamov, Almost Periodic Solutions of Impulsive Differential Equations. Lecture Notes in Mathematics, vol. 2047 (Springer, Heidelberg, 2012), pp. xx+217. ISBN: 978-3-642-27545-6
I.M. Stamova, R. Ilarionov, On global exponential stability for impulsive cellular neural networks with time-varying delays. Comput. Math. Appl. 59(11), 3508–3515 (2010)
I.M. Stamova, G.T. Stamov, Impulsive control on global asymptotic stability for a class of impulsive bidirectional associative memory neural networks with distributed delays. Math. Comput. Model. 53(5–6), 824–831 (2011)
G.T. Stamov, I.M. Stamova, J.O. Alzabut, Existence of almost periodic solutions for strongly stable nonlinear impulsive differential-difference equations. Nonlinear Anal. Hybrid Syst. 6, 818–823 (2012)
Acknowledgements
We would like to thank the anonymous referee for his/her constructive comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2019 Springer Nature Switzerland AG
About this chapter

Cite this chapter
Abbas, S., Mahto, L. (2019). Piecewise Continuous Stepanov-Like Almost Automorphic Functions with Applications to Impulsive Systems. In: Dutta, H., Kočinac, L.D.R., Srivastava, H.M. (eds) Current Trends in Mathematical Analysis and Its Interdisciplinary Applications. Birkhäuser, Cham. https://doi.org/10.1007/978-3-030-15242-0_4
Download citation
DOI: https://doi.org/10.1007/978-3-030-15242-0_4
Published:
Publisher Name: Birkhäuser, Cham
Print ISBN: 978-3-030-15241-3
Online ISBN: 978-3-030-15242-0
eBook Packages: Mathematics and StatisticsMathematics and Statistics (R0)