
Abstract
The main result achieved in this paper is an operational Tau-Collocation method based on a class of Lagrange polynomials. The proposed method is applied to approximate the solution of variable-order fractional differential equations (VOFDEs). We achieve operational matrix of the Caputo’s variable-order derivative for the Lagrange polynomials. This matrix and Tau-Collocation method are utilized to transform the initial equation into a system of algebraic equations. Also, we discuss the numerical solvability of the Lagrange-Tau algebraic system in the case of a variable-order linear equation. Error estimates are presented. Some examples are provided to illustrate the accuracy and computational efficiency of the present method to solve VOFDEs. Moreover, one of the numerical examples is concerned with the shape-memory polymer model.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional calculus is an old mathematical topic from the 17th century, used to model many phenomena. Its applications in physics and engineering include viscoelastic materials (Bagley and Torvik 1985), statistical mechanics (Mainardi 1997), solid mechanics (Rossikhin and Shitikova 1997), etc. An application to economics is reported in (Baillie 1996).
Different numerical methods have been used to solve a variety of various kind of fractional equations. For example, Legendre wavelet method (Jafari et al. 2011), B-Spline functions (Lakestani 2017), Chebyshev polynomials (Sedaghat et al. 2012), fractional-order general Lagrange scaling functions (Sabermahani et al. 2019) and so on.
In recent years, the concepts of variable-order fractional integral and derivative have been introduced. Researchers have studied the applications of this type of problem. Variable-order fractional calculus is used to model such phenomena as transient dispersion in heterogeneous media (Sun et al. 2014), anomalous diffusions with variable and random orders (Sun et al. 2010), alcoholism (Gomez-Aguilar 2018), glass transition from amorphous networks to shape-memory behavior (Xiao et al. 2013), viscoelastic and elastoplastic spherical indentation (Ingman et al. 2000) and so on.
An important application of fractional calculus of variable-order is the modelling of shape-memory polymers (SMPs) (Li et al. 2017).
A SMP is a polymer material which can be temporarily deformed in response to an external stimulus such as change in temperature and light, then return to its initial shape (Xiao et al. 2013).
SMPs have attracted the attention of many researchers in fundamental investigation and technology innovation. An important particular case of SMP is the shape-memory nanocomposites (SMCs), where the incorporation of functional inorganic nanofillers in the shape-memory polymer matrices is purposely performed. Such materials can be used in medical devices, self-healing systems, sensors, controllable devices, adaptive and deployable structures, etc (Pilate et al. 2016).
Figure 1 shows examples of the ability to change the shape memory in photoresponsive materials and the effect of light and temperature on restoring its initial shape.

Adapted from Pilate et al. (2016)
Shape-memory effect of photoresponsive polymers. a A film of grafted polymer. (a) Permanent shape; (b) temporary shape; (c) recovered permanent shape. b An IPN polymer film. (a) Permanent shape; (b) corkscrew spiral temporary shape; (c) recovered shape obtained by irradiation with UV light.
In this study, one of our examples is dedicated to the numerical solution of the SMP model.
There have not been many studies on the numerical analysis of VOFDEs. Lin et al. 2009 have examined the stability and convergence of finite difference method for the variable-order fractional diffusion equation. Several numerical techniques have been used to solve this type of problems such as the method based on Legendre wavelets (Chen et al. 2015; Hosseininia and Heydari 2019a), finite difference method (Sun et al. 2012), Bernstein operational matrices (Omar and Mohammed 2017), a shifted Legendre–Gauss–Radau collocation approach (Bhrawyi et al. 2017), Gegenbauer wavelets (Usman et al. 2018), Bernstein polynomials (Chen et al. 2016), method based on Chebyshev cardinal functions (Heydari et al. 2019a), Adams–Bashforth–Moulton method (Ma et al. 2012), reproducing kernel (Li and Wu 2017; Jia et al. 2017), the polynomial least squares method (Bota and Căruntu 2017), wavelet method (Hosseininia et al. 2019; Heydari et al. 2019b), meshfree approach (Shekari et al. 2019), meshfree moving least squares method (Hosseininia and Heydari 2019b) and so on.
Lagrange polynomials are a well-known mathematical tool. There are different ways of choosing the nodes for Lagrange interpolation (\(t_{i}, i=0, 1, \ldots , N\)). If we consider \(t_{i}\) as zeros of orthogonal polynomials (such as Legendre polynomials, Chebyshev polynomials, etc), we derive a set of orthogonal Lagrange polynomials (Szegö 1967).
In this case, the properties of the orthogonal polynomials can be combined with features of Lagrange interpolation.
In this work, we first recall in Sect. 2 some known preliminaries which are used in this study. In Sect. 3, we present the Tau-Collocation algorithm and matrix representation of present method for solving fractional differential equations of variable-order. Also, we discuss the numerical solvability of the Lagrange-Tau algebraic system in the case of a linear equation. Error analysis is proposed in Sect. 4. In Sect. 5, we present some tests and their numerical results to display the high accuracy and efficiency of proposed method.
Here, the general form of the fractional differential equations of variable-order is considered as follows:
on the interval \(t \in [0, 1]\), subject to
where \(0 < \gamma (t) \le 1\), \(0< \gamma _{1}(t)< \gamma _{2}(t)< \ldots \gamma _{n}(t) < \gamma (t)\).
2 Preliminaries
This section provides some definitions and notations that are used in this study.
Definition 2.1
The Caputo’s fractional derivative of order \(\gamma \) is defined as (Podlubny 1999)
For the Caputo derivative, we have:
- 1.$$\begin{aligned} D^ \gamma t^k = \left\{ \begin{array}{ll} 0,&{}\gamma \in N_{0},\; k < \gamma ,\\ \frac{\varGamma (k+1)}{\varGamma (k- \gamma +1)} t^{k- \gamma }, &{} {\text{otherwise}}. \end{array}\right. \end{aligned}$$(2)
- 2.$$\begin{aligned} D^ \gamma \lambda =0, \end{aligned}$$
where \(\lambda \) is constant.
Definition 2.2
Let \(u:\;[0, 1] \rightarrow R\) be a function, \(\gamma > 0\) a real number and \(m= \lceil \gamma \rceil \), where \(\lceil \gamma \rceil \) denotes the smallest integer greater than or equal to \(\gamma \), the Riemann–Liouville fractional integral is defined as (Podlubny 1999)
For this fractional integral, we have
and
Definition 2.3
The variable order of Riemann–Liouville fractional integral operator is defined by (Doha et al. 2017; Samko 1995)
Moreover, we have the following property (Bahaa 2017)
Definition 2.4
The variable order of Caputo’s fractional derivative operator is defined by (Bhrawyi et al. 2017; Zhao et al. 2015)
where \(m-1<\gamma (t) < m\).
Also, we get the following property (Hassani et al. 2017)
Definition 2.5
Suppose that \(\forall t\in [0, 1], 0< \gamma (t) <1, I^{1-\gamma (t)} f \in C[0, 1]\). Then, the variable of Caputo fractional derivative for \(t>0\) is defined by (Bahaa 2017; Bhrawyi et al. 2017)
2.1 Lagrange Polynomials
Consider a set of nodes \(t_{i} \in [0, 1],\;i=0, 1, \ldots , N\). Then, the Lagrange polynomials can be defined as follows (Stoer and Bulirsch 2013):
Moreover, in these points, the Lagrange polynomials are also described by (Sabermahani et al. 2018)
where
where \(s=1,\;2, \ldots ,\;N, \; \; i \ne k_{1} \ne \ldots \ne k_{s}\).
In this study, the nodes \(t_{i},\;(i=0, 1, \ldots , N)\) are the zeros of the shifted Legendre polynomial \(P_{N+1}\) of order \(N+1\) on [0, 1]. The system \(L_i, i=0,1,2, \ldots , N\) forms a set of orthogonal polynomials (Szegö 1967).
3 Description of Numerical Method
Let \(L(t)= \{ L_{0}(t), L_{1}(t), \ldots , L_{N}(t) \}\) be a set of Lagrange polynomials. We define \(u_{N}(t)\) as a Tau approximation of u(t) as follows
where
and using Eq. (10), we have
where
The following lemma describes the effect of the variable-order of derivative on a given set of Lagrange polynomials.
Lemma 3.1
Matrix representing the effect Caputo’s variable-order derivative on the coefficients of the Lagrange polynomials in Eq. ( 13 ) is given by
where \(\tilde{\mu } ^{\gamma }_{t}= B D_{t} \mu ^{\gamma }_{t}\) , \(D_{t}\) is derivative operational matrix of Taylor polynomials and
Proof
The analytic form of the Lagrange polynomials is given by Eq. (13). Using Eqs. (5), (13) and \(0 < \gamma (t) \le 1\), for the variable-order derivative, we get
so the proof is complete. \(\square \)
Now, using the Lagrange polynomials as basis functions, we employ the Tau-Collocation method together with matrix representing the effect Caputo’s variable-order derivative in order to transform the problem (1) into a system of algebraic equations.
Substituting Eqs. (11)–(15) in problem (1), we derive
with initial condition
As in the Tau method, the basic idea of the Tau-Collocation method is to add, a perturbation term \(H_{N}(t)\) to the right hand side of Eq. (16). We consider \(H_{N}(t)\) as follows
where \(g(t, \tau _{0}, \tau _{1}, \ldots , \tau _{\phi -1})\) is a function of t and \(\tau _{i}, i = 1,2, \ldots , \phi -1\) are free parameters for this function. Since \(L_{N-m + 1} (t)\) is an orthogonal polynomial, then we get
with initial condition
As proved in (Ortiz and El-Daou 1998), the classical collocation method with collocation points \(c_j\) is equivalent to the Tau method with a polynomial perturbation term M(t), if \(c_j\) are the roots of M(t). In the case of the Tau-Collocation method proposed here, the roots of the perturbation term \(H_{N}(t)\) coincide with the roots of the polynomial \(L_{N-m+1}(t)\), which are also the collocation points. Therefore, the Tau-Collocation method can be applied as the usual collocation method, independently of the form of the perturbation term \(H_{N}(t)\). When the collocation method is applied to Eq. (17) using \(N-m+1\) roots of \(L_{N-m+1}(t)\) as collocation nodes, we derive a system of algebraic equations. Solving this system by an adequate numerical method, we achieve the unknown vector \(U_N\).
3.1 Numerical Solvability of the Lagrange-Tau Algebraic System
Here, we consider the Lagrange-Tau algebraic system, Eq. (16), and we discuss the numerical solvability of this system in the case of a linear equation.
In this discussion, we use the bounded and compact operator’s theory. For simplicity, consider following equation
with the initial conditions
where u(t) satisfies in Eqs. (18), (19).
Suppose that \(K \in (L^{2}(\varOmega ))^{2}\) and \({\mathcal {K}}: L^{2}(\varOmega ) \rightarrow L^{2}(\varOmega )\) is defined as follows
\({\mathcal {K}}\) is a linear and compact operator. The integral operators with weakly singular kernel functions are linear, bounded and compact operators. So, if \(u(t) \in H^{1}(\varOmega )\), then the variable-order Caputo’s fractional derivative operator \(D^{\gamma (t)}u(t): H^{1}(\varOmega ) \rightarrow L^{2}(\varOmega )\) is a linear and compact operator, where \(H^{1}(\varOmega )\) is the well-known Sobolev space.
Theorem 3.1
(Atkinson and Han 2009) Assume that \(V, {\tilde{V}}\)are Banach spaces and \(\{{\mathcal {P}}_{N}\}\)is a family of bounded projections on\({\tilde{V}}\)with
where\( \nu \in V\). Let\( {\mathcal {W}}: V \rightarrow {\tilde{V}}\)be a compact operator, then
Theorem 3.2
(Atkinson and Han 2009) Let \({\mathcal {W}}: V \rightarrow {\tilde{V}}\)be bounded and at least one is a Banach space and\(\lambda - {\mathcal {W}}: V \rightarrow {\tilde{V}}, \lambda \in {\mathcal {C}}\)is bijective. Moreover, suppose that
then, the bounded operator\((\lambda - {\mathcal {P}}_{N}{\mathcal {W}})^{-1}: {\tilde{V}} \rightarrow V\)exists.
We presume the orthogonal projection \(Y_{N}: {\tilde{V}} \rightarrow V\) , where \({\tilde{V}} = R \times L^{2}(\varOmega )\), \(V= R \times {\mathcal {P}}_{N}^{M}\) and \({\mathcal {P}}_{N}^{M} = \{ L_{0}(t), L_{1}(t), \ldots , L_{N}(t) \}\).
Now, consider Eq. (18) that is a special form of Eq. (1). Let the Eq. (18) must be solved. By approximating this equation by Lagrange-Tau method, we have the following problem
where B and \(I_{d}\) are the linear initial and the identity operator, respectively. The method is implemented in this form, as it converts directly to an equivalent finite linear system, special form of Eq. (16). We can rewrite this equation as
Let
Therefore, we have
\({\tilde{u}} \in H^{1}(\varOmega )\), the operator \(D^{\gamma (t)}: H^{1}(\varOmega ) \rightarrow L^{2}(\varOmega )\) is bounded and compact, then \({\tilde{D}}\) is a linear, bounded and compact operator. Therefore, by Theorems 3.1 and 3.2 display the operator \(({\tilde{I}}-Y_{N} {\tilde{D}})^{-1}\) exists and is bounded. Thus, the Legendre-Tau numerical solution of Eq. (18) exists and is unique.
4 Error Analysis
Here, we propose a technique for estimating the error of the Lagrange-Tau-Collocation method.
For simplicity, we rewrite this problem in the following form
with the initial conditions
where u(t) satisfies in Eqs. (20), (21). Moreover, \(u_{N}(t)\) satisfies in the Tau problem as follows
with
We define an error function as
Subtracting Eq. (22) from (20), we obtain
which can be rewritten as
Moreover, from Eqs. (23) and (21), we conclude that
Now, if we apply the Tau-Collocation method to solve Eqs. (24), (25), we obtain the Tau problem
with initial conditions
By solving the problem (26), (27) we obtain \( \varepsilon _{N,M}(t)\) which is an approximation of \( \varepsilon _{N}(t)\) by the Lagrange-Tau-Collocation method with \(M \ge N\) and can be used to achieve a more accurate result.
Remark 4.1
Suppose that \(u_{N}(t)= \sum _{i=0}^{N} u_{i}L_{i}(t)\) is the best approximation of u on the interval [0, 1] and \(U= span \{ L_{0}(t), L_{1}(t), \ldots , L_{N}(t) \}\). Then, using Taylor’s formula and according to concept of the best approximation, we have
Since, N is constant. We conclude that \(u_{N}(t)\) converges to u(t) as N tends to infinity.
Remark 4.2
Matrix representing the effect Caputo’s variable-order derivative presented in Lemma 3.1 is obtained without any approximation. So its error is zero. On the other hand, Tau-Collocation method is convergent (Canuto et al. 2006). Consequently, with respect to this and Remark 4.1, it can be concluded that the proposed method is convergent.
5 Numerical Results and Illustrative Test Problems
In order to evaluate the advantages and the efficiency and accuracy of this method to solve VOFDEs, we have applied this method to some examples. The computations associated with the tests have been performed using Mathematica 10.0.
Example 1
Here, we consider the variable order \(\gamma (t)\) for a linear VOFDE modelling the shape-memory behavior which has the form (Li et al. 2017)
with \(u(0) =0\) and \(\gamma (t)=0.65+0.2t^{2}, f(t)= \frac{2t^{1.35-0.2t^{2}}}{\varGamma (2.35-0.2t^{2})}\). The analytic solution of Eq. (28) is \(u(t)=t^{2}\). We apply the present method with \(N=2\) for solving this problem. Figure 2a displays the absolute error of numerical results for this equation. By comparing the numerical results obtained from our method with the method presented in Li and Wu (2017), we can see that our results are much more accurate even with a smaller number of basis functions.
Additionally, we present an error estimate obtained by the method described in Sect. 4. Figure 2b displays the error estimate of this problem for \(M=N=2\).

a Absolute error of approximate solutions for \(N=2\), b error estimate of the present method for \(N=2\) in Example 1
Example 2
Consider the following linear VOFDE (Chen et al. 2015)
subject to
the variable order is chosen to be \(\gamma (t) = \frac{t+2e^{t}}{7}\), and
The analytic solution of Eq. (29) is \(u(t) = 5(1+t)^{2}\). We apply the present method for solving this problem with \(N=2\), then the problem can be transformed into the following equation
Then, by using the collocation method, we derive the numerical solution for this problem. The absolute error of the present scheme is displayed in Table 1 and compared with the errors obtained by the finite difference scheme(FDS) (Chen et al. 2015) and Legendre wavelet method reported in (Chen et al. 2015). From this Table, we can see that this method is efficient to solve this equation.
Example 3
We consider the following VOFDE (Bhrawyi et al. 2017)
with \(u(0)=0\),
and \(\gamma (t)= \frac{1+\cos ^{2}(t)}{4}\).
The analytic solution is \(u(t)=e^{t}\). The absolute errors of the approximation obtained by the present method using various values of N are shown in Table 2. From these results, we can see that this method provides high accuracy when applied to the given equation.
Example 4
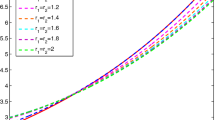
Consider the nonlinear VOFDE (Hassani et al. 2017)
with \(u(0)=0, \; \gamma (t)=1-0.5 e^{-t}\) and \(f(t) = \frac{\varGamma (\frac{9}{2})+t^{\frac{7}{2}- \gamma (t)}}{\varGamma (\frac{9}{2}- \gamma (t))}+\sin (t)t^{7}\).
The exact solution of Eq. (32) is \(u(t) = t^{\frac{7}{2}}\). This equation is solved by using the present method with \(N=6, 10\). The graph of the absolute error for this problem is displayed in Fig. 3. The absolute errors of our results with \(N=6, 10\) are displayed in Table 3.

Absolute error of the present method for \(N=10\), in Example 4
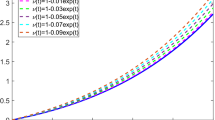
Example 5
Consider the following nonlinear VOFDE
and the function f(t) is selected so that the analytical solution of Eq. (33) is \(u(t)=\cos (t)\). By applying the proposed technique, we solve this problem, numerically with \(N=6\). Figure 4a displays a comparison between the curves of the analytic and approximate solutions this value of N. The absolute error of the numerical solutions for \(N=6\) is plotted in Fig. 4b. In conclusion, Fig. 4 demonstrates the effectiveness of the present method when applied to this nonlinear problem.

a Analytic and numerical solution, b absolute error of the present method for \(N=6\), in Example 5
6 Conclusion
The aim of the present paper is to develop an efficient and accurate method to solve VOFDEs by using the well-known Tau-Collocation method based on Lagrange polynomials. The effect of the Caputo’s variable-order derivative on the coefficients of the Lagrange polynomials is obtained. This effect and the Tau-Collocation method are utilized to transform the initial equation into a system of algebraic equations. Moreover, we employ the present technique for the numerical solution of an equation modelling the behavior of a the shape-memory polymer. We discuss the numerical solvability of the variable-order of Lagrange-Tau algebraic system and presented the convergence analysis. The accuracy, validity and applicability of this scheme are confirmed by the numerical results.
References
Atkinson KE, Han W (2009) Theoretical numerical analysis. A functional analysis framework, 3 edn. Texts in applied mathematics, vol 39. Springer, Dordrecht
Bagley RL, Torvik PJ (1985) Fractional calculus in the transient analysis of viscoelastically damped structures. AIAA J 23:918–925
Bahaa GM (2017) Fractional optimal control problem for variable-order differential systems. Fract Calc Appl Anal 20(6):1447–1470
Baillie RL (1996) Long memory processes and fractional integration in econometrics. J Econom 73:5–59
Bhrawyi AH, Zaky MA, Abdel-Aty M (2017) A fast and precise numerical algorithm for a class of variable-order fractional differential equations. Proc Romanian Acad Ser Math Phys Tech Sci Inf Sci 18(1):17–24
Bota C, Căruntu B (2017) Analytic approximate solutions for a class of variable order fractional differential equations using the polynomial least squares method. Fract Calc Appl Anal 20(4):1043–1050
Canuto C, Hussaini MY, Quarteroni A, Zang TA (2006) Spectral methods. Springer, Berlin
Chen YM, Liu LQ, Liu D, Boutat D (2016) Numerical study of a class of variable order nonlinear fractional differential equation in terms of Bernstein polynomials. Ain Shams Eng J. https://doi.org/10.1016/j.asej.2016.07.002
Chen YM, Wei YQ, Liu DY, Yu H (2015) Numerical solution for a class of nonlinear variable order fractional differential equations with Legendre wavelets. Appl Math Lett 46:83–88
Doha EH, Abdelkawy AM, Amin AZM, Baleanu D (2017) Spectral technique for solving variable-order fractional Volterra integro-differential equations. Numer Methods Partial Differ Equ. https://doi.org/10.1002/num.22233
Gomez-Aguilar JF (2018) Analytical and Numerical solutions of a nonlinear alcoholism model via variable-order fractional differential equations. Phys A 494:52–75
Hassani H, Dahaghin MS, Heydari H (2017) A new optimized method for solving variable-order fractional differential equations. J. Math. Ext. 11:85–98
Hosseininia M, Heydari MH, Ghaini FM, Avazzadeh Z (2019) A wavelet method to solve nonlinear variable-order time fractional 2D Klein-Gordon equation. Comput Math Appl 78(12):3713–3730
Hosseininia M, Heydari MH (2019) Legendre wavelets for the numerical solution of nonlinear variable-order time fractional 2D reaction-diffusion equation involving Mittag–Leffler non-singular kernel. Chaos Solitons Fractals 127:400–407
Hosseininia M, Heydari MH (2019) Meshfree moving least squares method for nonlinear variable-order time fractional 2D telegraph equation involving Mittag–Leffler non-singular kernel. Chaos Solitons Fractals 127:389–399
Heydari MH, Avazzadeh Z, Yang Y (2019) A computational method for solving variable-order fractional nonlinear diffusion-wave equation. Appl Math Comput 352:235–248
Heydari MH, Avazzadeh Z, Farzi Haromi M (2019) A wavelet approach for solving multi-term variable-order time fractional diffusion-wave equation. Appl Math Comput 341:215–228
Ingman D, Suzdalnitsky J, Zeifman M (2000) Constitutive dynamic-order model for nonlinear contact phenomena. J Appl Mech 67:383–390
Jafari H, Yousefi SA, Firoozjaee MA, Momani S, Khalique CM (2011) Application of Legendre wavelets for solving fractional differential equations. Comput Math Appl 62(3):1038–1045
Jia YT, Xu MQ, Lin YZ (2017) A numerical solution for variable order fractional functional differential equation. Appl Math Lett 64:125–130
Lakestani M (2017) Numerical solutions of the KdV equation using B-Spline functions. Iran J Sci Technol Trans Sci 41:409. https://doi.org/10.1007/s40995-017-0260-7
Li Z, Wang H, Xiao R, Yang S (2017) A variable-order fractional differential equation model of shape memory polymers. Chaos Solitons Fractals 102:473–485
Li X, Wu B (2017) A new reproducing kernel method for variable order fractional boundary value problems for functional differential equations. Comput Math Appl 311:387–393
Lin R, Liu F, Anh V, Turner I (2009) Stability and convergence of a new explicit finite-difference approximation for the variable-order nonlinear fractional diffusion equation. Appl Math Comput 212:435–45
Ma S, Xu Y, Yue W (2012) Numerical solutions of a variable-order fractional financial system. J Appl Math. https://doi.org/10.1155/2012/417942
Mainardi F (1997) Fractional calculus: some basic problems in continuum and statistical mechanics. In: Carpinteri A, Mainardi F (eds) Fractals and fractional calculus in continuum mechanics. Springer, New York, pp 291–348
Omar AA, Mohammed OH (2017) Bernstein operational matrices for solving multi-term variable order fractional differential equations. Int J Curr Eng Technol 7(1):68–73
Ortiz EL, El-Daou MK (1998) The Tau method as an analytic tool in the discussion of equivalence results across numerical methods. Computing 60:365. https://doi.org/10.1007/BF02684381
Pilate F, Toncheva A, Dubois P, Raquez JM (2016) Shape-memory polymers for multiple applications in the materials world. Eur Polym J 80:268–294
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Rossikhin YA, Shitikova MV (1997) Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl Mech Rev 50:15–67
Sabermahani S, Ordokhani Y, Yousefi SA (2018) Numerical approach based on fractional-order Lagrange polynomials for solving a class of fractional differential equations. Comp Appl Math 37:3846–3868. https://doi.org/10.1007/s40314-017-0547-5
Sabermahani S, Ordokhani Y, Yousefi SA (2019) Fractional-order general Lagrange scaling functions and their applications. BIT Numer Math. https://doi.org/10.1007/s10543-019-00769-0
Samko SG (1995) Fractional integration and differentiation of variable order. Anal Math 21(3):213–236
Sedaghat S, Ordokhani Y, Dehghan M (2012) Numerical solution of the delay differential equations of pantograph type via Chebyshev polynomials. Commun Nonlinear Sci Numer Simul 17:4815–4830
Shekari Y, Tayebi A, Heydari MH (2019) A meshfree approach for solving 2D variable-order fractional nonlinear diffusion-wave equation. Comput Methods Appl Mech Eng 350:154–168
Stoer J, Bulirsch R (2013) Introduction to numerical analysis, 3 edn. (trans: Bartels R, Gautschi W, Witzgall C). Springer
Sun H, Chen W, Li C, Chen Y (2012) Finite difference schemes for variable-order time fractional diffusion equation. Int J Bifurc Chaos 22(04):1250085
Sun HG, Chen W, Sheng H, Chen YQ (2010) On mean square displacement behaviors of anomalous diffusions with variable and random orders. Phys Lett A 374:906–910
Sun HG, Zhang H, Chen W, Reeves DM (2014) Use of a variable-index fractional-derivative model to capture transient dispersion in heterogeneous media. J Contam Hydrol 157:47–58
Szegö G (1967) Orthogonal polynomials, 3rd edn. American Mathematical Society, Providence
Usman M, Hamid M, Haq RU, Wang W (2018) An efficient algorithm based on Gegenbauer wavelets for the solutions of variable-order fractional differential equations. Eur Phys J Plus 133(8):327. https://doi.org/10.1140/epjp/i2018-12172-1
Xiao R, Choi J, Lakhera N, Yakacki CM, Frick CP, Nguyen TD (2013) Modeling the glass transition of amorphous networks for shape-memory behavior. J Mech Phys Solids 61(7):1612–1635
Zhao X, Sun ZZ, Karniadakis GE (2015) Second-order approximations for variable order fractional derivatives: algorithms and applications. J Comput Phys 293:184–200
Acknowledgements
P.M. Lima acknowledges support from FCT, within project SFRH/BSAB/135130/2017. Also, the authors would like to thank the referees for their valuable comments and suggestions that improved the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sabermahani, S., Ordokhani, Y. & Lima, P.M. A Novel Lagrange Operational Matrix and Tau-Collocation Method for Solving Variable-Order Fractional Differential Equations. Iran J Sci Technol Trans Sci 44, 127–135 (2020). https://doi.org/10.1007/s40995-019-00797-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40995-019-00797-z