
Abstract
In this work, we start by Kuznetsov’s model which describes the interaction between two cell populations: tumor cells and effector cells. We insert in this model controls corresponding to two types of treatment: chemotherapy and immunotherapy, which leads to a controlled dynamic system. The goal of this paper is to minimize the density of tumor cells as well as the dose of treatment. We seek for an optimal treatment which will be characterized by using Pontryagin’s Maximum Principle.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Cancer treatment aims to heal or unless to stop the evolution of the tumor as long as possible in order to allow the patient to have an almost normal life.
The main treatments are: surgery, radiotherapy, chemotherapy, hormonotherapy, and immunotherapy. These treatments can be used individually or in combination depending on the type of cancer. The purpose is to define the appropriate treatment for each patient in ordre to give the best results with least sequelae.
Chemotherapy treatment has been treated in several mathematical models [5, 12, 15], based on control theory, where control variable is the administered dose. It’s widely known that the immune system impacts the success of chemotherapy, see [10, 14]. Hence, combining chemotherapy and immunotherapy protocols attracts great interest in oncology. However, this combination is hard for patients, then it would be suitable to minimize the total amount of drugs while preserving their efficiency. In our previous work [13], we insert in Kuznetsov’s model [11], two controls corresponding to two types of treatment: chemotherapy and immunotherapy. We study the viability of this model under states constraints. This result allows to evaluate the chances of remission of a patient depending on its state at the first diagnostic. Nevertheless, this previous study does not take into consideration side effects of treatments, which are exhibited in the present work in the form of optimal control problem.
The contribution of this work consists on defining an objective function that depends on the density of tumor cells and the total amount of drugs subject to a coupled system of ordinary differential equations presented in [13]. The goal is to explore optimal strategies combining chemotherapy and immunotherapy treatments allowing to minimize tumor cells density together with minimal toxicity in the patient body. The objective functional involves quadratic control as used in several works, since it’s generally more theoretically tractable, the existence of an optimal control is obtained under mild conditions and the square in control terms models severity of the drugs side effects [1, 3, 8, 16].
This paper is divided into five sections. The next section is devoted to mathematical formulation of the model, positivity and boundedness of the system. Section 3 deals with the existence and characterization of an optimal control. Section 4, illustrates the results theoretically obtained, by numerical simulations, where specific parameters are related to melanoma cancer. Some conclusions are drawn in Sect. 5.
Mathematical Model
Starting from kuznetsov’s work [11] describing a dynamic system of two cell populations, that are, tumor cells T and effector cells E, and using interaction laws between them [1, 3, 4, 7]: The natural growth of tumor cells is assumed to be a logistic function \(f_{T}\):
The dynamic of effector cells obeys to an affine law \(f_{E}\) explaining that effector cells have a constant source rate s, while death is proportional to the population of effector cells.
The competition between cell populations is modeled by \(-nET \) and \(-m TE \). This model takes into account the stimulation of effector cells by the presence of tumor cells, this phenomenon is modeled by a Michaelis–Menten term \(\frac{\rho TE}{g+T}\) to characterize the rate of accumulation of cytotoxic effector cells in the tumor cell localization region. The dynamic system of Kuznetsov is therefore:
In order to support the praticiens in their choice of therapies, we add to this model two kinds of treatment, chemotheapy and immunotherapy. Combining the both treatments for many cancer types could potentially leads to enhance efficiency [2, 6]. The goal of chemotherapy is to attack the growth factors of cancer cells and stop their proliferation. However, it also attacks healthy cells including progenitor cells, which produce effector cells. The immune system becomes therefore also affected. Hence the interest of introducing immunotherapy to boost the immune system. Mathematically speaking, we introduce two control variables (c(t), i(t)) corresponding to treatments (chemotherapy/immunotherapy) and leading to the following controlled system:
where the control i describes the direct effect of immunotherapy on effector cells while the concentration of chemotherapy is denoted by c.
We admit that the concentrations of both therapies should not exceed a maximum threshold and are limited as follow:
where the set U is defined as:
Here we list all parameters used in the model (1), their meaning and units:
Positivity and Boundedness of Trajectories
To be biologically meaningful, trajectories of system (1) must be positively invaraint and bounded.
Proposition 1
All trajectories of the system (1), starting in \(\mathbb {R}^2_+\), are positively invariant.
Proof
To prove the positive invariance of the trajectories, it suffices to study the behavior of the vector field \((\dot{T},\;\dot{E})\) on the boundary of \(\mathbb {R}^2_+\).
If T tends to 0 then \(\dot{T}=0\).
If E tends to 0 then \(\dot{E}=s+i>0\), since \(i\ge 0\) and \(s>0\).
Therefore, the vector field \((\dot{T},\;\dot{E})\) is pointed inside \(\mathbb {R}^2_+\) and then trajectories T and E of the dynamic system (1) are positively invariant. \(\square \)
Let us show that the dynamical system (1) provides bounded trajectories even if \(t_f=+\infty \).
Proposition 2
Assume that
Then the positive trajectories of the system (1) are uniformly bounded.
Proof
Recall that
Note that the logistic function \(a(1-bT)T\) is concave and we have
then,
We deduce by standards calculus of the linear differential equations that
So the state T which corresponds to the density of the tumor cells is well bounded.
For the boundedness E, we have
Consdier \(i_{max}\) the upper bounds of i.
We obtain then the following inequality
Our hope is to prove that there exists \(Q_M>0\) such that
Consider the function
The analysis of Q shows that it takes a mininum at \(\sqrt{\dfrac{\rho g}{m}}-g\) and
On the other hand, according to condition (2) we have that
which implies that
and then
Hence, the inequality (3) becomes
We conclude that
where \(B_{1}=s + i_{max}\). \(\square \)
Theory of Control
Let’s rewrite the controlled dynamic system (1) as:
where \(x=(T,E)\) and \(u=(c,i) \in U=[0,c_{max}]\times [0,i_{max}]\).
Moreover \(f:\mathbb {R}^2_+\times U\longrightarrow \mathbb {R}^2\) is defined as:
with
To dynamic (4), we associate a quadratic control objective functional, minimizing density of tumor cells and the total amount of drugs, [1, 3, 8, 16], as follows:
For \(u(\cdot )=(c(\cdot ),i(\cdot )) \in L^{\infty }([0,t_{f}],\;U)\), we define
where
T is the tumor cells density, c(t) describes the amount of chemotherapy agent doses and i(t) is the immunotherapy injection. The weights \(w_{1}\) and \(w_{2}\), with values between 0 and 1, are considered to privilege one treatment over another. On the other hand, since the density of tumor cells and treatment doses do not have the same order of magnitude, we need to introduce \(\epsilon _{1}\) and \(\epsilon _{2}\) which are the scaling factors. This allows us to display more clearly population dynamics with one objective function.
The problem is to minimize the objective function J on \(\mathscr {U}:=L^{\infty }([0,t_{f}],\;U) \). These considerations lead to the following optimal control problem:
Existence of Optimal Control
Now, we have to find a trajectory which minimizes the objective function J(u). According to [9], we establish the existence of an optimal control, and then we characterized it. This existence depends on the regularity hypotheses of the studied model.
Theorem 1
For each control \(u\in \mathscr {U}\) there exists a unique solution \(x=(T,E)\) of the system (4) defined on \([0,t_f]\).
Moreover, the problem (8) admits an optimal control \(u^{*}\in \mathscr {U}\) such that
Proof
To prove this theorem we need to prove the following lemma \(\square \)
Lemma 1
The function f(., u) is continuous for all \(u\in U\) and there exists positive constants \(C_{1}\) and \( C_{2}\) such that for all \((x,x',u)\in (\mathbb {R}^2_+)^2\times U\)
Moreover
- 1.
U is closed and convex.
- 2.
fis linear with respect to control u.
- 3.
The integrand L of J is continuous, convex with respect the second variale, on U and is bounded below by \(A_{1} u^{2} \) where \(A_{1}> 0\).
Proof of the Lemma 1:
For the continuity of f and taking account of the expression (5), the right hand side of system (4) must be continuous. We see that only the right hand side of \( \dot{E}\) has a chance to be discontinuous. Since both g and T are positive this eliminates the possibility of \( \frac{\rho TE}{g+T} \) to be undefined. Therefore the entire system is continuous, and hence the function f is continuous.
Furthermore we have
where \(C_1= max(\frac{a}{4b} + s, d+ \rho , E_{max}+ m E_{max}, \mu T_{max} + hT_{max},1)\).
For the lipschitziennity of f with respect to the second variable, we have:
where \(C_{2}= \max (k_{1}, k_{2},1)\), \(k_{1}= a+2abT_{max}+(m+n) E_{max}\) and \(k_{2}= d+(m +n)T_{max} + 2\rho \).
At this stage, we must mention that the continuity of the function f and the conditions (9) and (10) assures the existence of a solution of the dynamic (4).
Now, for the second condition of the Lemma 1, we note that U is closed and convex by definition. For the convexity of the integrand L of J(u) with respect to the second variable \(u=(c,i)\), we need to show
Then, the following difference should be negative
We have
Since \(0 \le p \le 1\) then
and
This implies that
Moreover, for the fourth condition, we have
if \(\epsilon _{1}{w_{1}} \le \epsilon _{2}{w_{2}} \) then we obtain
which implies that
where \(A_1=\dfrac{\epsilon _{1}{w_{1}}}{2}\). Else if \(\epsilon _{2}{w_{2}} < \epsilon _{1}{w_{1}} \), we obtain \(A_1=\dfrac{\epsilon _{2}{w_{2}}}{2}\) by the same reasoning.
Hence
with \(x=(T,E)\) and \(u=(c,i)\). \(\square \)
Characterization of Optimal Control
A trajectory can be parameterized as the projection of a solution of a constrained Hamiltonian system. Consider again the controlled system :
Let \( (x^{*},u^{*}) \) be an optimal process for the problem (8), so there exists an absolutely continuous application \(\lambda \) such that \(\lambda : [0,t_{f}] \rightarrow {R}^{2}\), called the adjoint vector. The following equations are satisfied for almost all \(t \in [0, t_{f}]\):
where H is the Hamiltonien associated with problem 8 and is defined by:
and \(\lambda =(\lambda _{1}, \lambda _{2})\) such that :
Since the controls are bounded, we form the Lagrangian as follows:
where \(W_{i}(t) \ge 0\) are penalty multipliers such that:
\( W_{1}(t)c(t) = 0 \) and \( W_{2}(t)(1 - c(t)) = 0 \) at the optimal \(c^{*}\).
\( W_{3}(t)i(t) = 0 \) and \( W_{4}(t)(1 - i(t)) = 0 \) at the optimal \(i^{*}\).
To characterize \((c^{*}, i^{*})\), we analyze the necessary optimality condition
We have,
and
Using standard optimality arguments, we characterize the optimal control as:
Where:
Since the second derivative of the Lagrangian with respect to c and i is positive, a minimum occurs at \((c^{*}, i^{*})\).
At this stage, we were able to express control in term of states (T, E) and adjoint states \((\lambda _{1},\lambda _{2})\), by applying Pontryagin’s Maximum Principle. By re-injecting this expression of control into the dynamic of states and co-states, we obtain Hamiltonian system. In the next section, we give some numerical simulations illustrating the theoretical results.
Numerical Simulations
General model leads to qualitative properties of cancer evolution. However, it would be relevant to study particular types of cancer with specific sets of parameters. In this section, we use the data made available in [2, 11]. Among the several numerical methods, we use the shooting method [17] to compute the optimal solution of (8) by solving the boundary value problem derived from the Pontryagin Maximum Principle and corresponding to the initial conditions \((T_{0}, E_{0})\), as well as final conditions on the adjoint states \((\lambda _{1}(t_{f}),\lambda _{2}(t_{f}))=(0,0)\).
Treatment doses c and i are normalized to be between zero and one, their order of magnitude is therefore 0. However, the order of magnitude of tumor cells is 6. In this numerical experiment, the system dynamics were non-dimensionalized using an order-of-magnitude concentration scale \(E_{0}=10^{6}\) for effector cells and \(T_{0}=10^{6}\) for tumor cells. While the time is scaled relative to the rate of tumor cell desactivation \(\tau = nT_{0}t\). Then, the dynamical system (1) becomes:
With \(z=\dfrac{T}{T_{0}}\) and \(y=\dfrac{E}{E_{0}}\). We use parameter values in Table 1 to define the new values of the non-dimensionalized parameters of (14), as follow:

We find numerically the optimal control minimizing the following objective functional:
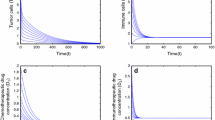
where scaling factors \(\epsilon _{1}\) and \(\epsilon _{2 }\) are equal to 1 because the order of magnitude of z is 0. Therefore, for numerical purposes, we discuss the results obtained according to the values of \(w_{1}\) and \(w_{2}\). At first, we use an \(w_{1}\) lower than \(w_{2}\) which means that we privilege chemotherapy as treatment. The Fig. 1 below shows the behavior of tumor cells and effector cells with high dose of chemotherapy and low dose of immunotherapy.

Time plot of tumor cells (T), effector cells (E), normalized chemotherapy c and normalized immunotherapy i during \(\tau _{f}=5\), which corresponds to a treatment duration equal to 50 days. Initial tumor size is \(1\times 10^{6}\) cells and initial effector cell level is \(1\times 10^{6}\) cells. The chemotherapy is privileged by choosing weight parameters as \(w_{1}=0.2\) and \(w_{2}=0.8\)
In Fig. 1 we privilige chemotherapy treatment, we can see that the maximum dose of (normalized) chemotherapy is administered throughout the treatment period of the therapeutic protocol, while the (normalized) immunotherapy is administered for a short time. Once the tumor is eradicated, the treatment is stopped, which prevents the growth of the immune cells due to the absence of immunotherapy that stimulates the effector cells. The density of tumor cells is driven near zero but resume their growth at the end.
Now we privilege immunotherapy and we get the results shown in the Fig. 2. With a high value of \(w_{1}\), maximum dose of chemotherapy can not be used for a long time but immunotherapy is administered for the duration longer than that in the Fig. 1. This influences the dynamic of tumor cells that almost desappear at the end of treatment, while the effector cells maintain their gowth.

The graphs of this figure represent the states and controls for weight parameter values \(w_1=0.7\) and \(w_2=0.3\). Initial tumor size is \(1\times 10^6\) cells and initial effector cell size is \(1\times 10^6\) cells. At the start of the treatment, a maximum dose of chemotherapy is administered and thereafter doses decrease. Whereas maximum dose of immunotherapy is administered for almost 1 month. The tumor is reduced to a very low level at the end of treatment while poulation of immune cells is increasing
We therefore notice that the results differ according to the values of \(w_{1}\) and \(w_{2}\). In our case, we obtain a good results by privileging immunotherapy which means choosing \(w_{1}\) higher than \(w_{2 }\), in this case, the tumor cells decrease definitively and tend to zero whereas the density of the effector cells remains high until the end of treatment.
For the values of parameters we used in this paper, we were able to find a therapeutic protocol that minimizes the density of tumor cells at the end of treatment with the time horizon \(\tau _{f}=5\). For a longer final time, the tumor cells can resume their growth, in this case we can change the therapeutic protocol at this moment or repeat it.
Conclusion
Control theory provides an adequate conceptual framework for the analysis of evolutionary systems depending on decision variables. The system approached in our case is of biological origin: it describes the interaction between two cell populations (tumor cells and effector cells) in the presence of two types of treatment (chemotherapy and immunotherapy).
The objective is to determine optimal therapies that minimize the density of tumor cells and the dose of treatment. After modeling this issue, we verify the existence of optimal solutions, and then we applied Pontryagin’s Maximum Principle to characterize it. The weight parameters \(w_{1}\) and \(w_{2 }\), in the objective function (7), reflects an efficiency comprmis in mixed therapy protocols (Chemotherapy/Immunotherapy). One perspective of this work is to consider the cost of treatment and patient comfort. So in a next work, we approach these issues as part of a multi-objective problem.
References
de Pillis, L.G., Fister, K.R., GU, W., Head, T., Maples, K., Neal, T., Kozai, K.: Optimal control of mixed immunotherapy and chemotherapy of tumors. J. Biol. Syst. 16(1), 51–80 (2008)
de Pillis, L.G., Gu, W., Radunskaya, A.E.: Mixed immunotherapy and chemotherapy of tumors: modeling, applications and biological interpretations. J. Theor. Biol. 238(4), 841–862 (2006)
de Pillis, L.G., Gu, W., Fister, K.R., Head, T., Maples, K., Murugan, A., Yoshida, K.: Chemotherapy for tumors: an analysis of the dynamics and a study of quadratic and linear optimal controls. Math. Biosci. 209(1), 292–315 (2007)
de Pillis, L.G., Radunskaya, A.E.: The dynamics of an optimally controlled tumor model: a case study. Math. Comput. Model. 37(11), 1221–1244 (2003)
Dixit, D.S., Kumar, D., Kumar, S., Johri, R.: A mathematical model of chemotherapy for tumor treatment. Adv. Appl. Math. Biosci. 3, 1–10 (2012)
Drake, C.G.: Combination immunotherapy approaches. Ann. Oncol. 23, viii41–viii46 (2012)
Feizabadi, M.S., Witten, T.M.: Modeling the effects of a simple immune system and immunodeficiency on the dynamics of conjointly growing tumor and normal cells. Int. J. Biol. Sci. 7(6), 700–707 (2011)
Fister, K.R., Panetta, J.C.: Optimal control applied to competing chemotherapeutic cell-kill strategies. SIAM J. Appl. Math. 63(6), 1954–1971 (2003)
Fleming, W., Rishel, R.: Deterministic and Stochastic Optimal Control. Springer, New York (1975)
Hanoteau, A., Henin, C., Moser, M.: L’immunothérapie au service de la chimiothérapie, de nouvelles avancées. Méd. Sci. 32(4), 353–361 (2016)
Kuznetsov, V.A., Makalkin, I.A., Taylor, M.A., Perelson, A.S.: Nonlinear dynamics of immunogenic tumors: parameter estimation and global bifurcation analysis. Bull. Math. Biol. 56(2), 295–321 (1994)
Martin, R.B., Fisher, M.E., Minchin, R.F., Teo, K.L.: A mathematical model of cancer chemotherapy with an optimal selection of parameters. Math. Biosci. 99(2), 205–230 (1990)
Sabir, S., Raissi, N.: Analysis of Tumor/Effector Cell Dynamics and Their Therapy, Trends in Biomathematics: Mathematical Modeling for Health, Harvesting, and Population Dynamics. Springer, Berlin (2019)
Schattler, H.M., Ledzewicz, U.: Optimal Control for Mathematical Models of Cancer Therapies, Interdisciplinary Applied Mathematics, vol. 42. Springer, New York (2015)
Serhani, M., Essaadi, H., Kassara, K., Boutoulout, A.: Control by viability in a chemotherapy cancer model. Acta Biotheor. 67, 177–200 (2019)
Sharma, S., Samanta, G.P.: Analysis of the dynamics of a tumor-immune system with chemotherapy and immunotherapy and quadratic optimal control. Differ. Equ. Dyn. Syst. 24(2), 149–171 (2015)
Trélat, E.: Contrôle optimal: Théorie et applications. Vuibert, Paris (2005)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Sabir, S., Raissi, N. & Serhani, M. Chemotherapy and Immunotherapy for Tumors: A Study of Quadratic Optimal Control. Int. J. Appl. Comput. Math 6, 81 (2020). https://doi.org/10.1007/s40819-020-00838-x
Published:
DOI: https://doi.org/10.1007/s40819-020-00838-x