
Abstract
In this paper, a novel adaptive fuzzy controller is developed for the uncertain fractional-order switched nonlinear systems whose output is quantized by a class of sector-bounded quantizers. Since the states are not completely measurable, an observer with quantized output signal is designed to estimate the unknown system states. Meanwhile, based on the fractional Lyapunov stability criterion, the Lyapunov function with sum functions and the virtual control function with hyperbolic tangent functions are designed. Besides, in order to improve the approximation accuracy of the unknown nonlinear functions generated by fractional differential, the prediction errors and auxiliary variables of series-parallel estimation model are introduced in backstepping procedures. The simulation results show that the control scheme ensures that all the signals of the considered system remain semi-globally uniformly ultimately bounded, and the tracking error converges to a small neighborhood of the origin regardless of arbitrary switching.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Since the end of the twentieth century, fractional calculus is no longer a strange mathematical theory. With the deepening of people’s understanding of nonlinear systems and genetic effect, the limitation of traditional mathematical model based on integral calculus is increasingly obvious. Taking the actual power system as an example, there are often many diffusion phenomena in the motor and transformer, such as skin effect, eddy current loss, heat loss, etc. For these systems, the modeling method of integer-order systems often ignores these slow diffusion effects. Therefore, the fractional system model is more suitable to describe these real physical systems with genetic and long memory effects. There are many researches on fractional-order systems [1,2,3]. At the same time, hybrid systems can describe various problems in the real world more accurately and reasonably. Switched system is one of the most important hybrid systems, which consists of several subsystems and one switching rule. Because of its broad representativeness, it has become one of the focus of control workers. At present, there are a lot of research results on switched system [4,5,6,7]. Meanwhile, adaptive control [8] has been widely studied. An adaptive neural network feedback control scheme for nonlinear switched pulse systems with a permissible switched strategy was proposed in [9].
Quantization can be regarded as the mapping of continuous signals to discrete finite sets [10,11,12]. It has important theoretical and practical significance in modern engineering and has attracted extensive attention in recent years. For the system with information quantization, its continuous control input, state variable and control output are quantized by quantizer, which leads to inevitable quantization error. Therefore, the effect of quantization error on the performance of the closed-loop system, especially on the stability of the system, needs to be studied carefully and clearly. [13] developed a hysteresis quantizer for the first time, which avoids the oscillation caused by the logarithmic quantizer and extends the conclusions from uncertain linear systems to uncertain nonlinear systems. The problem of adaptive quantization feedback control of SISO strict-feedback uncertain nonlinear systems with hysteresis quantization input was studied in [14].
Aiming at the uncertainty of nonlinear system, intelligent control [15,16,17] based on fuzzy logic systems (FLSs) and neural network (NN) has been widely studied. The universal approximation property of fuzzy logic can provide theoretical basis for modeling nonlinear systems and analyzing the unknown properties of complex systems. In the cause of approximating the unknown dynamics of the system, an adaptive control scheme was proposed in [18], which directly adjusts the ideal weight vector estimation of the switch. When the backstepping method is applied to nonlinear system, the derivative process of virtual control will cause the expansion of item number, so the dynamic surface control (DSC) method is adopted, which cannot only eliminate the expansion of differential terms, make the controller and parameter design simple, but also reduce the number of input variables of neural network and fuzzy system. [19] used DSC method, the disturbance observer adaptive control of nonlinear transport model with external disturbance was proposed.
It is well known that backstepping design has become a major controller construction method for nonlinear system control [20,21,22,23]. Many advantages of backstepping design have been widely recognized, such as adaptive controller design, global stabilization controller design and robustness. At present, most of the results of the backstepping design method are aimed at the traditional integer-order nonlinear system, and there are few applications in the fractional-order nonlinear system control [24,25,26]. Therefore, how to design an adaptive backstepping controller for triangular fractional-order nonlinear system based on fractional-order Lyapunov stability criterion is still a problem to be solved. It is worth noting that, because the fractional derivative of quadratic function is very complex, most existing backstepping control methods of integer-order nonlinear system cannot be directly extended to fractional-order nonlinear system. In [27], for the uncertain fractional-order nonlinear systems with triangular structure, an adaptive backstepping controller based on a certain transformation and integral-order Lyapunov method was designed. For a class of fractional-order nonlinear systems, [28] constructed a class of adaptive backstepping controller. However, for fractional-order nonlinear switched systems with unknown state variables, there is no control scheme can solve the system stability problem with measurement signal error caused by output quantization. Hence, on the basis of the existing results, it is urgent to design a new controller to make the fractional-order nonlinear switching system with output quantization stable and have good tracking performance.
Motivated by the above observations, in this paper, an adaptive fuzzy controller is developed for the uncertain fractional-order switched nonlinear systems with quantized output, where the quantizers contain the hysteresis, logarithmic and uniform quantizer. The unmeasured state is obtained by using the switched fuzzy state observer. By introducing the delta function, one can use the previous estimated values as original value of the parameters at the switching instants. The contributions of this paper can be summarized as follows: (1) For uncertain fractional-order nonlinear systems, an adaptive fuzzy backstepping recursive algorithm is proposed. The convergence of the algorithm is analyzed by fractional Lyapunov method. (2) By constructing the prediction errors and auxiliary variables based on the serial-parallel estimation model, a compound learning method is proposed to update fuzzy membership functions and improve approximate accuracy, which can dynamically show the working process of intelligent approximation. (3) Based on different subsystems and switched adaptive laws, switched filters are designed to reduce the conservativeness of the adaptive controllers, and all the signals are bounded under arbitrary switching.
The content of this paper is as follows: Sect. 2 puts forward some preliminary ideas and briefly describes the existing problems. A fuzzy switched observer is designed in Sect. 3. In Sect. 4, the adaptive control scheme is proposed. Section 5 gives the stability analysis of the design scheme. The simulation results in Sect. 6 represent the effectiveness of the scheme, followed by conclusions in Sect. 7.
2 Preliminaries and Problem Formulation
2.1 Preliminaries
Consider the following SISO fractional-order nonlinear switched system:
where \(\alpha \in (0,1]\) and \({\underline{x}}_i=[x_1,x_2,...,x_i]^\text{T},i=1,2,...,n\) is the state vector, \(y\in R\) is the output of the system. \(\delta (t)\rightarrow {\mathbb {N}}=\{1,2,...r\}\) is the switching signal. \(\delta (t)=k\in {\mathbb {N}}\) indicates the kth subsystem in the implementation. \(f_{i,\delta (t)}(x_{1},...,x_{i})\) is an unknown smooth function representing the uncertainty of the system. \(u_k\) denotes the switched input signal.
2.2 Fuzzy Logic Systems
Because of the uncertainty of the considered system, the fuzzy logic system is introduced. Construct a fuzzy logic system (FLS) in the form of If-Then rules:
\(R^{q}\): If \( x_{1}\) is \( F^{q}_{1} \) and \( x_{2} \) is \(F^{q}_{2}\) and ...and \(x_{n}\) is \(F^{q}_{n}\), then y is \(B^{q},q=1,2,\ldots ,\iota \), where \(x=[x_1,\ldots ,x_n]^\text{T}\) is the fuzzy logic system input, y is the fuzzy logic system output, fuzzy sets \(F^{q}_i \) and \(B^{q}\), associated with the fuzzy functions \(\mu _{F^q_i}(x_i)\) and \(\mu _{B^q}(y)\), respectively. \(\iota \) is the rules number. Through singleton function, the FLS can be formulated as
where \({\overline{y}}_{q} = \max _{y\in R}\mu _{B^q}(y)\).
Let \(\varphi _q = \frac{\prod ^n_{i=1}\mu _{F^q_i}(x_i)}{\sum ^\iota _{q=1}(\prod ^n_{i=1}\mu _{F^q_i}(x_i))}\), and denote \( \theta =[ {\overline{y}}_1,{\overline{y}}_2, \cdots ,{\overline{y}}_\iota ]^\text{T}=[\theta _1,\theta _2,\cdots ,\theta _\iota ]^{\text{T}} \) and \( \varphi ^\text{T}(x)=[\varphi _1(x),...,\varphi _\iota (x)]\), then FLS can be rewritten as \( y(x)=\theta ^\text{T}\varphi (x).\)
Lemma 1
[29] Letf(x) be a continuous function defined on a compact set\({\varOmega }\). Then for any constant\(\nu \), there exists an FLS such as
By Lemma 1, FLSs are general approximators, which can approximate any smooth function on a compact set, so the nonlinear terms can be approximated as
To facilitate the further analysis, the system (1) is rewritten as
where \(\varepsilon _{i,\delta (t)}=\nu _{i,\delta (t)}+d_{i,\delta (t)}(t),i=1,2,\ldots ,n-1\), \({\varDelta } f_{i,\delta (t)} =f_{i,\delta (t)}({\underline{x}}_i)-f_{i,\delta (t)}(\hat{{\underline{x}}}_i)\), \(\hat{{\underline{x}}}_i\) stands for the estimate of \(\underline{x}_i\) and \(\hat{{\underline{x}}}_i= ({\hat{x}}_1,{\hat{x}}_2,\ldots ,{\hat{x}}_i)^\text{T}\). \(\nu _{i,\delta (t)}=f_{i,\delta (t)}({\hat{x}}_i)- {\theta ^*}^\text {T}_{i,\delta (t)}\phi _{i,\delta (t)}(\hat{{\underline{x}}}_i)\) satisfies that \(\vert \nu _{i,\delta (t)}\vert \le \nu ^*_{i,\delta (t)}\), and for given \(\delta (t)=k\), \(\nu ^*_{i,\delta (t)}\) is an unknown positive constant.
Assumption 1
\(d_{i,\delta (t)}\) satisfies that \(\vert d_{i,\delta (t)}\vert \le d^*_{i,\delta (t)}\), and for given \(\delta (t)=k\), \(d^*_{i,\delta (t)}\) is an unknown positive constant.
Assumption 2
Assume that the unknown function \(f_i(\cdot )\) satisfies the global Lipschitz condition. That is, there exist some known constants \(m_i\) such that \(\vert f_i({\underline{x}}_i)-f_i(\hat{{\underline{x}}}_i)\vert \le m_i\Vert {\underline{x}}_i-\hat{{\underline{x}}}_i\Vert \), where \(i=1,2,...,n\). \(\Vert \cdot \Vert \) represents the 2-norm of a vector.
2.3 Quantizer
With the application and development of network control system, quantitative control has become an effective way to solve control system problems. The commonly used quantizer include logarithmic quantizer, uniform quantizer and hysteresis quantizer. They are defined as follows
2.3.1 Uniform Quantizer
The form of uniform quantizer is as follows
where \(u_0>0\) and \(u_1=u_0+\frac{l}{2}\), \(u_i=u_{i-1}+l\), l stands for quantization interval.
2.3.2 Logarithmic Quantizer
The form of logarithmic quantizer is as follows
where \(u_i=\rho ^{1-i}\eta \) and \(\rho =\frac{1-\sigma }{1+\sigma }\) and \(q(u)\in U=\{0,\pm u_i\}\).
2.3.3 Hysteresis Quantizer
The form of hysteresis quantizer is as follows
where \(u_i=\rho ^{1-i}\eta \) and \(\rho =\frac{1-\sigma }{1+\sigma }\) and \(q(u)\in U = \{0,\pm u_i, \pm u_i (1+\sigma )\}\).
2.3.4 Quantization Error
For the practical system, the quantization error will affect the stability of the system. So quantification is important but challenging. The difference between the quantized result and the value before quantification is called quantization error. The quantization error satisfies
where \(0<\sigma <1\) and d are known parameters of quantizer. Therefore, the output quantification error considered in this paper is in the following form: \(\vert q(y)-y\vert \le \sigma \vert y\vert +(1-\sigma )d=\sigma \vert y\vert +\eta \).
Remark 1
Different from uniform quantizer, there are unequal quantization levels in hysteresis and logarithmic quantizers, which are easy to implement and also reduce the average rate. Having different quantized values but the same coarseness, two logarithmic quantizers can compose a hysteresis quantizer. Besides, chattering by the additional quantization levels can be avoided by employing hysteresis quantizer [30].
2.4 Fractional Calculus and Related Lemmas
This section introduces several important lemmas of fractional calculus.
The form of fractional-order integration is as follows:
where \({\varGamma }(\alpha )=\int _{0}^\infty \tau ^{\alpha -1}e^{-\tau }d\tau \) is the gamma function. The form of the \(\alpha \)th Caputo fractional derivative is as follows
where \(n-1<\alpha \le n\). The Mittag-Leffler function with two parameters \(\alpha \) and \(\gamma \) is defined as
Its Laplace transform can be written as
Lemma 2
[31] Let\(x(t)\in R^n\)be a vector of differentiable function. Then,\({\mathcal {D}}^\alpha _t (x^\text {T}(t)x(t))\le 2x^\text {T}(t){\mathcal {D}}^\alpha _t (x(t))\)holds for any time instant\(t\ge t_0\)and\(\alpha \in (0,1]\).
Lemma 3
[32] Let\(x(t)\in R^n\)be a vector of differentiable function. Then, the following relationship\({\mathcal {D}}^\alpha _t (x^\text {T}(t)P x(t))\le 2x^\text {T}(t)P{\mathcal {D}}^\alpha _t (x(t))\)holds for any time instant\(t\ge t_0\)and\(\alpha \in (0,1]\), wherePis a constant, square, symmetric, and positive-definite matrix.
Lemma 4
[33] For a real number\(\alpha \)satisfying\(0<\alpha <2\), a real numberpsatisfying\(\frac{\pi \alpha }{2}<p<\min \{\pi ,\pi \alpha \}\)and a complex numberq, the following formula applies to all integers\(n\ge 1\)
when \(\vert t\vert \rightarrow \infty \), \(p\le \vert \arg (t)\vert \le \pi \).
Lemma 5
[33] For a real number\(\alpha \)satisfying\(0<\alpha < 2\)and an arbitrary real numberq, if there exists a positive constantpand\(\frac{\pi \alpha }{2}<p\le \min \{\pi ,\pi \alpha \}\), then one has
where\(C>0\), \(p\le \vert \arg (t)\vert \le \pi \)and\(\vert t\vert \ge 0\).
3 Adaptive State Observer Design
Noting that all states \(x_1,\ldots ,x_n\) in system (1) are not completely measurable for feedback design. Therefore, a state observer should be established to estimate the states. The state observer is designed as follows
Construct observer error as \(e=x-{\hat{x}}\). Then, from (1), (5) and (16), the observer error equation is expressed as
where \({\widetilde{\theta }}^\text {T}_{i,\delta (t)}={\theta ^*}^\text {T}_{i,\delta (t)}-\theta ^\text {T}_{i,\delta (t)}\), and \({\varDelta } F_{\delta (t)}=({\varDelta } f_{1, \delta (t)}, {\varDelta } f_{2, \delta (t)},\ldots ,{\varDelta } f_{n, \delta (t)})^\text{T}\), \(B_i=(0,\ldots ,0,1,0,\ldots ,0)^\text{T}\),
The coefficient \(l_{i,\delta (t)}\) is chosen such that for any given \(Q^\text {T}_{\delta (t)}=Q_{\delta (t)}>0\), there exists a common positive-definite matrix P, such that
On the basis of the fuzzy state observer (16), a series-parallel estimation model similar to [34] is designed
where \({\varLambda }_{i,\delta (t)},i=1,2,\ldots n-1\) is a designed constants. The prediction error \(\zeta _i\) is defined as \(\zeta _i={\hat{x}}_i-\hat{{\hat{x}}}_i\), then, one can obtain
which will be used later.
Choose the common Lyapunov candidate \(V_0\) as
For the kth activated subsystem, the time derivative of \(V_0\) is computed by using (17) and Lemma 3 as
By Youngs inequality and \(0<\phi ^\text {T}_{i,k}(\cdot )\phi _{i,k}(\cdot )\le 1\), it follows that
where \(\varepsilon ^*_k=(\varepsilon ^*_{1,k},\varepsilon ^*_{2,k},\ldots ,\varepsilon ^*_{n,k})^\text{T}\) and \(\varepsilon ^*_{i,k}=\nu ^*_{i,k}+d^*_{i,k}\) is an unknown constant.
Then, the time derivative of \(V_0\) along the solution of (23)–(25) is computed as
where \(\lambda _0=\lambda _{\text {min}}(Q)-n-2-\Vert P\Vert ^2\sum _{i=1}^nm^2_{i,k}-2\Vert P\Vert \Vert L_k\Vert \sigma +\sigma ^2{\hat{x}}_1-\Vert P\Vert ^2+\Vert L_k\Vert ^2\) and \(M_0=\Vert P\Vert ^2\Vert \varepsilon ^*_k\Vert ^2+\eta ^2+\Vert P\Vert ^2\Vert L_k\Vert ^2\).
4 Switched Adaptive Output Feedback Controller Design
To overcome the explosion of complex problems caused by repeated differentiation of the virtual control, the following changes of coordinates are designed as
where \({\hat{x}}_{ic}\) can be obtained by the virtual control \({\hat{x}}_{id}\) through the filter with a switched positive constant \(\omega _{i,k}\), as follows
Let the definition of \(\chi _i\) be the compensated tracking error
where \(v_i\) are the subsidiary variables to be designed. Then, the design process of the controller is as follows
Step 1: According to (16), the Caputo fractional derivative of \(z_1\) is
Consider the Lyapunov function candidate as
where \(\varpi _1\) is a positive constant. From (20), (30), (31) and Lemma 2, it follows that
By using Youngs inequality, the fact \(0<\phi ^\text {T}_{i,k}\phi _{i,k}<1\) and the fact \(\vert x\vert \le x \tanh (x/\varrho )+\beta \varrho \) with \(\beta =0.2785\) and \(\varrho \) is a positive constant, one has
where \(\tau _{1,k}\) and \(\nu _{1,k}\) are positive constants.
The virtual control \({\hat{x}}_{2d}\), the time fractional derivative of \(v_1\) and the corresponding update law are as follows
where \(\xi _{1,l}\) is a delta function defined as
Substituting (40)–(43) into (33) results in
where \(\lambda _1=\lambda _0-\sigma ^2 l^2_{1,k}-\frac{1}{2}l^2_{1,k}\) and \(M_1=M_0+l^2_{1,k}\sigma ^2{\hat{x}}^2_1+\eta ^2l^2_{1,k}+\sum _{k=1}^r\beta \tau _{1,k}+\sum _{k=1}^r\beta \nu _{1,k}\).
Step i: According to (27), one can obtain \(z_i= {\hat{x}}_i-{\hat{x}}_{ic}\). By using (16), the derivative of \(z_i\) can be expressed as
Consider the Lyapunov function candidate as
where \(\varpi _i\) is a positive constant. From (20), (44) and Lemma 2, it follows that
where \(\tau _{i,k}\) and \(\nu _{i,k}\) are positive constants.
The virtual control \({\hat{x}}_{(i+1)d}\), the time fractional derivative of \(v_{i}\) and the corresponding update law are as follows
where \(\xi _{i,l}\) is a delta function defined as
Substituting (53)–(56) into (47) results in
where \(\lambda _i=\lambda _{i-1}-\sigma ^2 l^2_{i,k}-\frac{1}{2}l^2_{i,k}\) and \(M_i=M_{i-1}+l^2_{i,k}\sigma ^2{\hat{x}}^2_1+\eta ^2l^2_{i,k}+\sum _{k=1}^r\beta \tau _{i,k}+\sum _{k=1}^r\beta \nu _{i,k}\).
Step n: According to (27), one can obtain \(z_n= {\hat{x}}_n-{\hat{x}}_{nc}\). By using (16), the derivative of \(z_n\) can be expressed as
Consider the Lyapunov function candidate as
where \(\varpi _n\) is a positive constant. From (20), (58) and Lemma 2, it follows that
The control \(u_k\), the time Caputo fractional derivative of \(v_{n}\) and the corresponding update law are as follows
where \(\xi _{n,l}\) is a delta function defined as
Substituting (64)–(67) into (60) results in
where \(\lambda _n=\lambda _{n-1}-\sigma ^2 l^2_{n,k}-\frac{1}{2}l^2_{n,k}\), \(M_n=M_{n-1}+l^2_{n,k}\sigma ^2{\hat{x}}^2_1+\eta ^2l^2_{n,k}+\frac{1}{2}\sum ^n_{i=1}\frac{\mu _i}{\varpi _i}{\theta ^*}^\text {T}_{i,k}\theta ^*_{i,k}\) and inequality \({\widetilde{\theta }}^\text {T}_{i,k}\theta _{i,k}\le -\frac{1}{2}{\widetilde{\theta }}^\text {T}_{i,k}{\widetilde{\theta }}_{i,k}+\frac{1}{2}\widetilde{\theta ^*}^\text {T}_{i,k}{\widetilde{\theta }}^*_{i,k}\) is used.
Define \(V=V_n\), \(a=\min _{k}\{\lambda _n/\lambda _{\max }(P),c_i-2,1-\frac{\mu _i}{\varpi _i}+2\Vert P\Vert ^2,1-2{\varLambda }_{i,k},i=1,2,\ldots ,n\}\), \(c=\max _k\{\Vert P\Vert ^2\Vert \varepsilon ^*_k \Vert ^2 +\eta ^2+\Vert P\Vert ^2\Vert L_k\Vert ^2+\sum _{i=1}^n\sigma ^2{\hat{x}}^2_1l^2_{i,k}+\sum _{i=1}^n\eta ^2 l^2_{i,k}+\frac{1}{2}\sum ^n_{i=1} \frac{\mu _i}{\varpi _i}{\theta ^*}^\text {T}_{i,k}\theta ^*_{i,k},i=1,2,\ldots ,n\}\) and \(V^k_{\theta }=\frac{1}{2}\sum _{l\ne k\in N}{\widetilde{\theta }}^\text {T}_{i,l}{\widetilde{\theta }}_{i,l}\). Then, (66) can be further written as
Remark 2
It is hard to design common Lyapunov functions as well as common virtual control functions for the existence of switched adaptive parameters. From (32), (46), (59), (40) and (53) it can be observed that by using the sum function and hyperbolic tangent function, the Lyapunov function and common virtual control functions are successfully designed and ensure their continuity.
Remark 3
Repeated differentiations of virtual control functions can lead to complexity explosion, so the filters are introduced to solve this problem. The filters with switched parameters have been designed in this paper, which can reduce the conversation of common control scheme.
Remark 4
The backstepping control method of a class of fractional-order nonlinear system is also proposed in paper [35]. It applies the stability analysis of integer-order lyapunov method to the known fractional-order system. However, in this paper, the system model may be completely unknown. In addition, the fractional-order adaptive law is proposed to analyze the stability by using the stability criterion.
5 Stability analysis
Theorem 1
Under Assumptions 1–2, considering the fractional-order switched nonlinear system (1) with output quantization. The filters (28), the control laws (64) and the adaptive laws, (42), (55) and (66) are designed. By adjusting the design parameters properly, the closed-loop signals are uniformly and bounded, and all error variables can be arbitrarily small.
Proof
According to (69), it is obtained that
where \(m(t)\ge 0\). The Laplace transform of (70) is equal to
where V(s) and M(s) are the Laplace transforms of V(t) and m(s), respectively. By formula (13), one gets
where \(*\) shows the location of the convolution operator. Noticing that m(t) and \(t^{-1}E_{\alpha ,0}(-at^\alpha )\) are nonnegative functions, then one can obtain
Noting that \(\arg (-at^\alpha )=-\pi \), \(\vert -at^\alpha \vert \ne 0\) for all \(t\ne 0\) and \(\alpha \in (0,1]\) and Lemma 5, there’s a positive constant C such that
Then, one gets
Therefore, for each \(\iota \), there exists a constant \(t_1>0\) such that \(t>t_1\), which means that
At the same time, through Lemma 4, it is obtained that
From (77), for each \(\iota >0\), there is a positive constant \(t_2\), which makes
For all \(t>t_2\). One can adjust the parameters to satisfy \(\frac{c}{a}<\frac{\iota }{3}\), therefore, one gets
Through (79), it is shown that \(x_i\), \(z_i\), \(v_i\), \(\chi _i\) and \(\theta _i,k\) are semi-globally uniformly ultimately bounded and \(\chi _i<\sqrt{2\iota }\).
Remark 5
In this paper, the integer-order non-strict system is extended to fractional-order systems. By designing fractional-order control and the related adaptive law, the fractional-order stability criterion of the system is established. The fractional-order stability criterion is established.
Remark 6
Through (78) and (79), one knows that the final limit of tracking error depends on a, c. It is clear that the decrease of \(\iota \) can be achieved through decreasing c or increasing a. Therefore, one can properly adjust the design parameters to decrease the tracking error.
Remark 7
Neural network control [36, 37] and fuzzy logic control [38] have many same characteristics. They can control a process individually or in combination. Compared with neural network control, the advantage of fuzzy logic system design is fast and simple. Once people determine the fuzzy variables and fuzzy sets according to experience, the model of fuzzy logic control system can be completed in a short time. Neural network scheme can be designed as similar performance control, but it needs huge amount of fast computing power. Because the fuzzy criteria depend too much on the subjective factors of human beings, it is a very worthy choice to combine them to form the fuzzy neural network system, which is also the future work of this paper.
6 Simulation Example
In this section, a fractional-order gyroscope is simulated to prove the validity of our main results.
where \(\delta (t)\in \{1,2\}\), \(p_{\delta }(t)=\frac{m^2_\delta }{4}-f_\delta \sin (wt)\), \(q_{\delta }(t)=\frac{m^2_\delta }{12}-\frac{d}{6}-\frac{f_\delta \sin (wt)}{6}\), \(m^2_1=100\), \(m^2_2=50\), \(d_1=1\), \(d_2=1\), \(w=25\), \(f_1=35.5\), \(f_2=45.5\). \(b_{1,1}=2\)\(b_{1,2}=1\), \(b_{2,1}=2\), \(b_{2,2}=1\). The additive disturbance is \(d_1(t)=0.05\sin (25t)\) and \(d_2(t)=0.03\cos (25t)\).
Choosing fuzzy membership functions as
Defining fuzzy basis functions as
where \(l=1,2,3,4,5\) and \(k=1,2\).
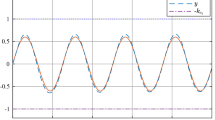
The initial state of system is \(x(0)=[0.01, 0.01]^\text {T}\), and the fractional order be \(\alpha =0.9\). The control gains for the controller are selected as \(c_1=c_2=5\), \(\varpi _1=10\), \(\varpi _2=5\), \(\mu _1=\mu _2=1\), \(\eta =0.0002\) and \(\sigma =0.5\). By solving the LMI. one can obtain \(L_1=[17.0116, 39.5777]^\text{T}\) and \(L_2=[16.9416, 41.2860]^\text{T}\). The simulation results are given in Figs. 1, 2, 3, 4, 5, 6, 7. The trajectory of the state variable \(x_1\), the observation value \({\hat{x}}_1\) and the quantization output q(y) are shown in Fig. 1. The quantization error varies with the fluctuation of the output signal and they are positively correlated. However, when the output signal increases, the tracking error can still converge to the small neighborhood of the origin, which means that the quantization error can be compensated successfully. Fig. 2 expresses the trajectories of \(x_2\) and \({\hat{x}}_2\). Fig. 3 shows the error trajectories. As one can see, the tracking errors converge on the small neighborhood of the origin. The trajectories of the tracking errors \(z_i\) and the auxiliary variables \(v_i\) are shown in Figs. 4 and 5. The control signal u is plotted in Fig. 6. Figure 7 shows the demonstration of switching signal. The simulation results show that the control scheme has good tracking performance and high reliability.

The trajectories of \(x_1\), \({\hat{x}}_1\) and q(y)

The trajectories of \(x_2\) and \({\hat{x}}_2\)

Observation errors \(e_1\) and \(e_2\)

The trajectories of \(z_1\) and \(z_2\)

The trajectories of \(v_1\) and \(v_2\)

The trajectory of control u

Switching signal
7 Conclusion
For a class of uncertain fractional-order nonlinear switched systems, an observer-based adaptive output feedback tracking control scheme has been proposed under the framework of adaptive backstepping control technology. At the same time, the output quantization of the system has been also considered in the control scheme. In order to obtain a good approximation of the system uncertainty, the serial-parallel estimation model has been added to backstepping procedure. In addition, an effective switched fractional-order filter has been designed by DSC technology to overcome the problem of “explosion of complexity”. The simulation results show that the controller designed in this paper ensures that all signals of the closed-loop system are bounded when switching occurs, and the tracking error converges to a small neighborhood of the origin.
References
Liu, H., Pan, Y.P., Li, S.G., Ye, C.: Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. 47(8), 2209–2217 (2017)
Komachali, F.P., Shafiee, M., Darouach, M.: Design of unknown input fractional order proportional-integral observer for fractional order singular systems with application to actuator fault diagnosis. IET Control Theory Appl. 13(14), 2163–2172 (2019)
Yassine, B., Mohamed, D., Michel, Z., Nour, E.R.: Robust \(H_\infty \) observer-based control of fractional-order systems with gain parametrization. IEEE Trans. Autom. Control. 62(11), 5710–5723 (2017)
Cheng, J., Zhan, Y.: Nonstationary \(l_{2}-l_{\infty }\) filtering for Markov switching repeated scalar nonlinear systems with randomly occurring nonlinearities. Appl. Math. Comput. (2020). https://doi.org/10.1016/j.amc.2019.124714
Ma, L., Huo, X., Zhao, X., Zong, G.: Adaptive fuzzy tracking control for a class of uncertain switched nonlinear systems with multiple constraints: a smallgain approach. Int. J. Fuzzy Syst. 21(8), 2609–2624 (2019)
Zhai, D., Lu, A.Y., Li, J.H., Zhang, Q.L.: Simultaneous fault detection and control for switched linear systems with mode-dependent average dwell-time. Appl. Math. Comput. 273(15), 767–792 (2016)
Wang, Z., Chen, G., Ba, H.: Stability analysis of nonlinear switched systems with sampled-data controllers. Appl. Math. Comput. 357(15), 297–309 (2019)
Zhai, D., An, L.W., Ye, D., Zhang, Q.L.: Adaptive reliable \(H_{\infty }\) static output feedback control against Markovian jumping sensor failures. IEEE Trans. Neural Netw. Learn. Syst. 29(3), 631–644 (2018)
Long, F., Fei, S.M.: Neural networks stabilization and disturbance attenuation for nonlinear switched impulsive systems. Neurocomputing 71(7), 1741–1747 (2008)
Xing, L., Wen, C., Zhu, Y., Su, H., Liu, Z.: Output feedback control for uncertain nonlinear systems with input quantization. Automatica 65, 191–202 (2016)
Cheng, J., Park, J.H., Zhao, X., Karimi, H.R., Cao, J.: Quantized nonstationary filtering of network-based Markov switching RSNSs: a multiple hierarchical structure strategy. IEEE Trans. Autom. Control (2019). https://doi.org/10.1109/tac.2019.2958824
Hayakawaa, T., Ishii, H., Tsumurac, K.: Adaptive quantized control for linear uncertain discrete-time systems. Automatica 45, 692–700 (2009)
Hayakawaa, T., Ishii, H., Tsumurac, K.: Adaptive quantized control for nonlinear uncertain systems. Syst. Control Lett. 58(9), 625–632 (2009)
Zhou, J., Wen, C.Y., Yang, G.H.: Adaptive backstepping stabilization of nonlinear uncertain systems with quantized input signal. IEEE Trans. Autom. Control. 59(2), 460–464 (2014)
Su, S.F., Lee, Z.J., Wang, Y.P.: Robust and fast learning for fuzzy cerebellar model articulation controllers. IEEE Trans. Syst. Man Cybern. Part B-Cybern. 36(1), 203–208 (2006)
Su, S.F., Tao, T., Hung, T.H:: Credit assigned CMAC and its application to online learning robust controllers. IEEE Trans. Syst. Man Cybern. Part B-Cybern. 33(2), 202–213 (2003)
Zhai, D., An, L.W., Li, J.H., Zhang, Ql: Fault detection for stochastic parameter-varying Markovian jump systems with application to networked control systems. Appl. Math. Model. 40, 2368–2383 (2016)
Zhai, D., An, L.W., Dong, J.X., Zhang, Q.L.: Switched adaptive fuzzy tracking control for a class of switched nonlinear systems under arbitrary switching. IEEE Trans. Fuzzy Syst. 26(2), 585–597 (2018)
Mou, C., Yi, S., Bin, J.: Adaptive neural control of uncertain nonlinear systems using disturbance observer. IEEE Trans. Cybern. 47(10), 3110–3123 (2017)
Zhai, D., An, L.W., Li, J.H., Zhang, Q.L.: Adaptive fuzzy fault-tolerant control with guaranteed tracking performance for nonlinear strict-feedback systems. Fuzzy Sets Syst. 302(1), 82–100 (2016)
Zhai, D., An, L.W., Dong, J.X., Zhang, Q.L.: Output feedback adaptive sensor failure compensation for a class of parametric strict feedback systems. Automatica 97, 48–57 (2018)
Li, Y.M., Min, X., Tong, S.C.: Adaptive fuzzy inverse optimal control for uncertain strict-feedback nonlinear systems. IEEE Trans. Fuzzy Syst. (2019). https://doi.org/10.1109/tfuzz.2019.2935693
Wang, H., Kang, S., Feng, Z.: Finite-time adaptive fuzzy command filtered backstepping control for a class of nonlinear systems. Int. J. Fuzzy Syst. 21(8), 2575–2587 (2019)
Zheng, Y., Nian, Y., Wang, D.: Controlling fractional order chaotic systems based on Takagi–Sugeno fuzzy model and adaptive adjustment mechanism. Phys. Lett. A 375(2), 125–129 (2010)
Boroujeni, E.A., Momeni, H.R.: Non-fragile nonlinear fractional order observer design for a class of nonlinear fractional order systems. Signal Process 92(10), 2365–2370 (2012)
Yang, Y., Chen, G.: Finite-time stability of fractional-order impulsive switched systems. Int. J. Robust Nonlinear Control 25(13), 2207–2222 (2015)
Wei, Y., Chen, Y., Liang, S., Wang, Y.: A novel algorithm on adaptive backstepping control of fractional-order systems. Neurocomputing 165, 395–402 (2015)
Efe, M.: Fractional-order systems in industrial automation—a survey. IEEE Trans. Ind. Inf. 7(4), 582–591 (2011)
Wang, H., Chen, B., Liu, X., Liu, K., Lin, C.: Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints. IEEE Trans. Cybern. 43(6), 2093–2104 (2013)
Liu, X., Zhai, D.: Adaptive decentralized control for switched nonlinear large-scale systems with quantized input signal. Nonlinear Anal.-Hybrid Syst. (2020). https://doi.org/10.1016/j.nahs.2019.100817
Aguila, N., Duarte, M.A., Gallegos, J.A.: Lyapunov functions for fractional-order systems. Commun. Nonlinear Sci. Numer. Simul. 19(9), 2951–2957 (2014)
Duarte, M.A., Aguila, N., Gallegos, J.A., Castro-Linares, R.: Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional-order systems. Commun. Nonlinear Sci. Numer. Simul. 22, 650–659 (2015)
Liu, H., Pan, Y., Li, S., Chen, Y.: Adaptive fuzzy backstepping control of fractional-order nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 47(8), 2209–2217 (2017)
Wang, L., Basin, M., Li, H., Lu, R.: Observer-based composite adaptive fuzzy control for nonstrict-feedback systems with actuator failures. IEEE Trans. Fuzzy Syst. 26(4), 2336–2347 (2018)
Wei, Y., Chen, Y., Liang, S., Wang, Y.: A novel algorithm on adaptive backstepping control of fractional order systems. Neurocomputing 165, 395–402 (2015)
Li, Y.M., Li, K.W., Tong, S.C.: Adaptive neural network finite-time control for multi-input and multi-output nonlinear systems with the powers of odd rational numbers. IEEE Trans. Neural Netw. Learn. Syst. (2019). https://doi.org/10.1109/tnnls.2019.2933409
Li, X.J., Yang, G.H.: Neural-network-based adaptive decentralized fault tolerant control for a class of interconnected nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 29(1), 144–155 (2018)
Li, Y.M., Li, K.W., Tong, S.C.: Finite-time adaptive fuzzy output feedback dynamic surface control for MIMO non-strict feedback systems. IEEE Trans. Fuzzy Syst. 27(1), 96–110 (2019)
Acknowledgements
This work was supported by the Fund of the National Natural Science Foundation of China (Grant Nos. 61973068, 61973062), and the Research Fund of State Key Laboratory of Synthetical Automation for Process Industries (Grant no. 2018ZCX23), the Scientific and Technological Innovation Leaders in Central Plains (Grant No. 194200510012) and the Science and Technology Innovative Teams in University of Henan Province (Grant No. 18IRTSTHN011).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Tang, X., Zhai, D., Fu, Z. et al. Output Feedback Adaptive Fuzzy Control for Uncertain Fractional-Order Nonlinear Switched System with Output Quantization. Int. J. Fuzzy Syst. 22, 943–955 (2020). https://doi.org/10.1007/s40815-020-00814-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-020-00814-z