
Abstract
This article focuses on adaptive fuzzy output feedback control for a class of fractional-order uncertain nonlinear strict-feedback systems with unmeasured states and full-state constraints. Fuzzy-logic systems are employed to approximate uncertain nonlinear functions, and a fractional-order fuzzy state observer based on the structure of the considered systems is framed to estimate the unmeasurable states. In each step of backstepping procedure, a barrier Lyapunov function is introduced in the design of the controller and the adaptation laws to satisfy the condition of the state constraints. Based on the fractional-order Lyapunov stability theory, a fractional-order adaptive fuzzy controller is constructed to guarantee that all the states remain in their constraint bounds, the tracking error converges to a bounded compact set containing the origin, and all signals in the closed-loop system are ensured to be bounded. Finally, a simulation example verifies the effectiveness of the proposed control design.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Due to the remarkable adapting ability for dealing with structural and parametric uncertainties, adaptive control theory for nonlinear systems as a research hotspot has attracted more and more attentions and interests in both academic and engineering fields [1], in which an accurate mathematical model is hard to build because of the complexity of the practical engineering systems. In addition, Fuzzy-logic systems (FLSs) [2,3,4] or artificial neural networks [5,6,7] as universal approximators are used to approximate any unknown functions for adaptive approaches to any desired accuracy, such as the ideal controller or the uncertain nonlinear dynamics without prior knowledge of the nonlinear systems. Therefore, intelligent adaptive control methods for uncertain nonlinear systems have developed rapidly in recent years [8,9,10,11,12], in which different types of control problem for nonlinear systems are presented by backstepping design technique.
Owing to the state constraints often appear in practical plants, the control stability of systems with the state constraints is an important issue for the control design. For the problem the system state constraints, the full-state-constrained nonlinear system under actuator faults are controlled in [13] by constructing barrier Lyapunov functions (BLFs). In [14], the practical output tracking control is provided for high-order uncertain nonlinear systems with full-state constraints via employing a BLF to guarantee that the constraints limit are not transgressed. For nonlinear strict-feedback systems guided by multiple dynamic leaders subject to full-state constraints, the authors in [15] proposed the distributed adaptive control method
using the FLS approximation. In [16], the controller design is provided for nonlinear multi-input multi-output (MIMO) systems under asymmetric full-state constraints by employing a BLF to guarantee that all the states constraints are not to violate their constraints. The output feedback control for strict-feedback MIMO nonlinear systems with full-state constraints and hysteresis input is made in [17] via constructing an adaptive radial basis function neural network mechanism.
Many real-world engineering plants and process behaviors, such as viscoelastic structures or heat conduction, can be modeled concisely and precisely using fractional-order dynamics [18]. Moreover, there are more potential advantages and design freedom for fractional-order controllers than integer-order controllers, which has many interesting properties and some potential applications receiving lots of attention from engineers [19,20,21,22,23,24]. Recently, a large volume of the fractional-order nonlinear systems regarding theory and applications are growing continuously [25,26,27,28,29,30]. Due to the existence of model uncertainties and external disturbance, the control design for uncertain fractional-order system have been attracted in research field, and many research results can be found, such as the neural network control [31, 32], the fuzzy control [33,34,35], the sliding mode control [36,37,38,39,40] and adaptive control [41,42,43,44].
To achieve the performance of the fractional-order with state constraints, the event-triggered control has been designed by introducing the BLF in [45]. For the incommensurate fractional-order chaotic model of the permanent magnet synchronous motors with full-state constraints and parameter uncertainties, the authors in [46] design an adaptive neural network controller using command filtering, where the BLFs are presented to solve the problem of state constraints. Although some achievements on fractional-order nonlinear constraint systems with the unmeasured states are obtained, there still are some important issues, such as how to design the output feedback control for fractional-order nonlinear systems with the full-state constraints, unknown functions and unmeasurable states.
Motivated by this purpose, the paper will try to design an observer-based adaptive fuzzy control for uncertain fractional-order nonlinear systems, to solve some problems appeared in the constraint control. The main contributions are summarized as
-
(1)
Based on adaptive backstepping recursive algorithm, both full-state constraints and uncertainties are considered in the design process for the fractional-order nonlinear systems, which is more general for application in practical engineering.
-
(2)
To estimate the unmeasurable state variables of the fractional-order nonlinear system, a fractional-order fuzzy state observer is constructed, which is much more precise than the general linear observer design.
-
(3)
Based on the fractional-order Lyapunov stability criterion, an adaptive fuzzy control scheme is designed for the triangular structure fractional-order nonlinear systems with constrained states, in which all signals of the closed-loop systems are bounded, and the tracking error converges to the origin with a small scale. The remainder of this article is organized as follows.
In Sect. 2, the preliminaries of this article including fuzzy-logic systems, fractional integrals and derivatives, and the preliminary results on fractional-order systems are presented. In Sect. 3, the description of the fractional-order system with full-state constraints are presented. The detailed observer and controller design of the fractional-order control system as well as the stability analysis are given in Sect. 4. Section 5 shows the simulation example to illustrate the effectiveness of theoretical results. Section 6 concludes this article.
2 Preliminary
2.1 Fuzzy-Logic Systems
Due to the fact that there are the uncertainties and unknown nonlinear functions of the considered system, the fuzzy-logic systems (FLSs) will be introduced in this section. There are four main components in a FLS [47]: (1) knowledge base; (2) fuzzifier; (3) fuzzy inference engine using fuzzy rules; and (4) defuzzifier. The knowledge base of FLS is made up of a series of fuzzy The IF-THEN rules used to make up the knowledge base of FLS are presented as follows: \({R^l}: \mathrm{{ if }} \) \({x_1} \) \(\mathrm{{ is }}\) \( F_1^l\) \(\mathrm{{ and }}\) \({x_2}\) \(\mathrm{{ is }}\) \(F_2^l\) \(\mathrm{{ }} \cdots \) \(\mathrm{{ and }}\) \({x_n}\) \(\mathrm{{ is }}\) \(F_n^l,\mathrm{{ then }}\) \(y\mathrm{{ }}\) is \(\mathrm{{ }}{G^l},\mathrm{{ }}l = \mathrm{{ }}1,2,\ldots \mathrm{{ }},\) N, where \(x = \mathrm{{ }}{[{x_1},\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }},\mathrm{{ }}{x_n}]^{\mathrm{T}}}\) is the FLS input, and y is FLS output. N is the number of inference rules. \({\mu _{F_i^l}}\left( {{x_i}} \right) \) and \({\mu _{{G^l}}}\left( y \right) \) are the membership functions of fuzzy sets \(F_i^l\) and \({G^l}\), respectively.
Combining the methods of the Singleton function, center average defuzzification, and product inference, the output of the FLS can be expressed as follows:
where \({{\bar{y}}_l} = \mathop {\max }\limits _{y \in R} {\mu _{{G^l}}}\left( y \right) \).
Denoting \({\theta ^{\mathrm{T}}} = \left[ {{{{\bar{y}}}_1},{{{\bar{y}}}_2},\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }},{{{\bar{y}}}_N}} \right] = \left[ {{\theta _1},{\theta _2},\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }},\mathrm{{ }}{\theta _N}} \right] \) and \(\varphi (x) = {\left[ {{\varphi _1}(x),{\varphi _2}(x),\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }}.\mathrm{{ }},\mathrm{{ }}{\varphi _N}(x)} \right] ^{\mathrm{T}}}\), where \({\varphi _l}\left( x \right) = {{\prod \nolimits _{i = 1}^n {{\mu _{F_i^l}}\left( {{x_i}} \right) } } \big / {\sum \nolimits _{l = 1}^N {\left( {\prod \nolimits _{i = 1}^n {{\mu _{F_i^l}}\left( {{x_i}} \right) } } \right) } }},\) \(l = \mathrm{{ }}1,2,\ldots \mathrm{{ }},N\). Then, FLS (1) can be rewritten as
Lemma 1
[48]. Let f(x) be a continuous function defined on a compact set \(\Omega \). Then, for \(\forall \varepsilon > 0\), there exists an FLS (2) such that \(\mathop {\sup }\limits _{x \in \Omega } \left| {f\left( x \right) - {\theta ^ * }^{\mathrm{T}}\varphi \left( x \right) } \right| \le \varepsilon \).
2.2 Fractional Calculus and Related Lemmas
In this section, we will introduce some definitions of fractional calculus and several important lemmas. For more details, please refer to the book [19, 49].
The fractional-order integral of continuous function \(f\left( t \right) \) with respect to t and the lower terminal \({t_0}\) is defined as follow:
where \(\Gamma \left( \alpha \right) = \int _0^\infty {{e^{ - t}}{t^{\alpha - 1}}\mathrm{d}t} \) is the Eulers Gamma function. The \(\alpha th\) Caputo fractional derivative is expressed by
where \(n - 1< \alpha < n,\) n is a positive integer. \(_{{t_0}}^{}D_t^\alpha \) is abbreviated as \({D^\alpha }\), when \({t_0} = 0\).
The one-parameter Mittag–Leffler function is defined as
where \(\zeta \) is a complex number, and \(\alpha ,\gamma \) are positive constants. Note that \({E_{\alpha ,1}}\left( \zeta \right) = {E_\alpha }\left( \zeta \right) \) and \({E_{1,1}}\left( \zeta \right) = {e^\zeta }\).
Lemma 2
[19]. If \(\phi \in \left( {\frac{{\pi \alpha }}{2},\pi \alpha } \right) \), then there exists \(\Upsilon > 0\), such that the Mittag–Leffler function is bounded by
Lemma 3
[50]. Let the \(\alpha th\) derivative of a smooth function \(V\left( t \right) :{{\mathbb {R}}^ + } \rightarrow {\mathbb {R}} \) satisfy
where \(\alpha \in \left( {0,1} \right) ,\eta > 0\), and \(\mu \ge 0\). Then, the following holds
where \(\vartheta = \max \left\{ {1,\Upsilon } \right\} \) and \(\Upsilon \) is defined in Lemma 2.
Lemma 4
[51]. Let \(x\left( t \right) \in {{\mathbb {R}}^n}\) be a vector of differentiable function. Then, \({D^\alpha }\left( {{x^{\mathrm{T}}}\left( t \right) x\left( t \right) } \right) \le 2{x^{\mathrm{T}}}\left( t \right) {D^\alpha }\left( {x\left( t \right) } \right) \) holds for any time instant \(t \ge {t_0}\) and \(\alpha \in \left( {0,1} \right] \).
Lemma 5
[21]. Let \(x\left( t \right) \in {{\mathbb {R}}^n}\) be a vector of differentiable functions. Then, the relationship \({D^\alpha }\left( {{x^{\mathrm{T}}}\left( t \right) Px\left( t \right) } \right) \le 2{x^{\mathrm{T}}}\left( t \right) P{D^\alpha }\left( {x\left( t \right) } \right) \) holds for any time instant \(t \ge {t_0}\) and \(\alpha \in \left( {0,1} \right] \), where \(P = {P^{\mathrm{T}}} > 0\) is a positive-definite matrix.
Lemma 6
[52]. Let \({h_1}\left( \cdot \right) \in {\mathbb {R}}\) and \({h_2}\left( \cdot \right) \in {\mathbb {R}}\) be smooth functions. Assume that the function \({h_1}\left( {{h_2}} \right) \) is convex (i.e., \({{{\partial ^2}{h_1}\left( {{h_2}} \right) } \big / {\partial h_2^2}} \ge 0\)), then, using the Caputo definition of fractional derivatives, one can obtain \({{{D^\alpha }{h_1}\left( {{h_2}} \right) \le \partial {h_1}\left( {{h_2}} \right) } \big / {\partial {h_2}}} \cdot {D^\alpha }{h_2}\) for \(\forall t \ge 0\) and \(\alpha \in \left( {0,1} \right] \).
Lemma 7
[53, 54]. For existing the arbitrary positive constant \(k_{{b_0}}^{}\), the following inequality holds
if all \(\varsigma \left( t \right) \) in the interval \(\left| {\varsigma \left( t \right) } \right| \le k_{{b_0}}^{}\).
3 System Descriptions
Consider a class of fractional-order nonlinear systems with state constraints described as follows:
where \(\alpha \in \left( {0,1} \right] \) is the system fractional-order, \(x = {\left( {\begin{array}{*{20}{c}} {{x_1}}&{{x_2}}&\ldots&{{x_n}} \end{array}} \right) ^{\mathrm{T}}} \in {{\mathbb {R}}^n}\) and \({_i} = {\left( {\begin{array}{*{20}{c}} {{x_1}}&{{x_2}}&\ldots&{{x_i}} \end{array}} \right) ^{\mathrm{T}}} \in {{\mathbb {R}}^i}\) are the system state vectors, \(u \in {\mathbb {R}}\) is the control input, \(y \in {\mathbb {R}}\) is the measurable output, \({f_i}\left( {{{\underline{x}}_i}} \right) \) is an unknown smooth function, and \({d_i}\left( t \right) \) is the bounded disturbance, \(i = 1,2, \ldots ,n\). In this paper, it is assumed that \({x_i},i = 2,3, \ldots ,n\), are unmeasurable and all the states are constrained in the compact sets, i.e., \({x_i} \in \left\{ {\left. {{x_i}} \right| \left| {{x_i}} \right| < {k_{{c_i}}},{k_{{c_i}}} > 0} \right\} ,i = 1,2, \ldots ,n\).
Remark 1
It’s worth noting that the integer-order calculus is a special case of the fractional-order one when \(\alpha \mathrm{{ = }}1\), and a large class of real-world systems, such as mechanical systems [55], power systems [30, 56], robotic systems [57] and Chaotic systems [19], can be presented using fractional-order system (8).
Rewriting (10) in the following form
where
and A is a strict Hurwitz matrix by selecting the appropriate L. Then, there is \({A^{\mathrm{T}}}P + PA = - 2Q\) where \({P^{\mathrm{T}}}\mathrm{{ = }}P > 0\) and \({Q^{\mathrm{T}}}\mathrm{{ = }}Q > 0\), and A can be obtained by solving matrix inequality \({A^{\mathrm{T}}}P + PA \le - 2Q\) in MATLAB.
Define the desired trajectory as \({y_r}\left( t \right) \), which is known and bounded, and the output tracking error is described as \({\chi _1} = y - {y_r}\left( t \right) \). The control objective is to design an adaptive fuzzy controller with the observer to guarantee that (1) a fuzzy observer is designed to estimate the unmeasured states \({x_i},i = 2,3, \ldots ,n\), and the tracking error \({\chi _1} = y - {y_r}\left( t \right) \) converges to a bounded compact set; (2) all the signals in the closed-loop system are guaranteed to be bounded, and (3) all the states are not to transgress their constrained sets.
Assumption 1
For \(\forall {k_{{c_i}}} > 0\), there exist the positive constants \({A_1}\) and \({Y_i},i = 1,2, \ldots ,n\), such that the desired trajectory \({y_r}\left( t \right) \) and its \(i\mathrm{{th}}\) order derivatives \({D^{i\alpha }}y_r^{}\left( t \right) \) [49] are assumed to satisfy \(\left| {{y_r}\left( t \right) } \right| \le {A_1} < {k_{{c_i}}}\) and \(\left| {{D^{i\alpha }}y_r^{}\left( t \right) } \right| \le {Y_i}\).
4 Fuzzy Observer and Controller Designs
In this part, it is assumed that the states of (10) are not available and an observer is framed to estimate the states. Then, an observer-based fuzzy adaptive control is established.
By the FLSs, the nonlinear terms in (10) can be approximated as \({f_i}\left( {\left. {{{\underline{x}}_i}} \right| {\theta _i}} \right) = \theta _i^{\mathrm{T}}{\varphi _i}\left( {{{\underline{x}}_i}} \right) \) and \({{\hat{f}}_i}\left( {\left. {{{\hat{\underline{x}} }_i}} \right| {\theta _i}} \right) = \theta _i^{\mathrm{T}}\varphi \left( {{{\hat{\underline{x}}}_i}} \right) \) where \({\hat{\underline{x}}_i} = {\left( {\begin{array}{*{20}{c}} {{{{\hat{x}}}_1}}&{{{{\hat{x}}}_2}}&\ldots&{{{{\hat{x}}}_i}} \end{array}} \right) ^{\mathrm{T}}}\) is the estimation of \({{\underline{x}}_i}\). Define the variables errors \({\varepsilon _i} = {f_i}\left( {{{\underline{x}}_i}} \right) - {{\hat{f}}_i}\left( {\left. {{{\hat{\underline{x}}}_i}} \right| \theta _i^*} \right) \) and \({\delta _i} = {f_i}\left( {{{\underline{x}}_i}} \right) - {{\hat{f}}_i}\left( {\left. {{{\hat{\underline{x}}}_i}} \right| {\theta _i}} \right) \) where \(\theta _i^*\) is the optimal parameter vectors, and define \({\varepsilon '_i} = {\varepsilon _i} + {d_i}\left( t \right) \) and \({\delta '_i} = {\delta _i} + {d_i}\left( t \right) \).
Assumption 2
There exist the constants \({{\bar{\varepsilon }} _i}\) and \({{\bar{\delta }} _i}\), such that \(\left| {{{\varepsilon '}_i}} \right| \le {{\bar{\varepsilon }} _i}\) and \(\left| {{{\delta '}_i}} \right| \le {{\bar{\delta }} _i}\), \(i = 1,2, \ldots ,n\).
Design a fractional-order fuzzy state observer as follows
Due to the nonlinear term \(Ly + \sum \limits _{i = 1}^n {{B_i}\left( {{{{\hat{f}}}_i}\left( {\left. {{\hat{\underline{x}}}_i} \right| {\theta _i}} \right) } \right) }\), the proposed nonlinear observer has higher estimation accuracy comparing with the fractional-order linear observer.
Let \({\tilde{x}} = x - {\hat{x}} = {\left( {\begin{array}{*{20}{c}} {{{{\tilde{x}}}_1}}&\cdots&{{{{\tilde{x}}}_n}} \end{array}} \right) ^{\mathrm{T}}}\) be the observer error, and due to (11) and (13) we obtain
where \(\delta = {\left( {\begin{array}{*{20}{c}} {{{\delta '}_1}}&\cdots&{{{\delta '}_n}} \end{array}} \right) ^{\mathrm{T}}}\). let \({\bar{\delta }} = {\left\| \delta \right\| ^2} = \sum \limits _{i = 1}^n {{\bar{\delta }} _i^2} \).
The following steps present the detailed design procedures of fuzzy adaptive output feedback controller.
Step 1: Using \({x_2} = {{\hat{x}}_2} + {{\tilde{x}}_2}\), the \(\alpha th\) Caputo fractional derivative of the tracking error \({\chi _1} = y - {y_r}\left( t \right) \) is
where \({{{\tilde{\theta }}} _1} = \theta _1^* - {\theta _1}\). Taking \({{\hat{x}}_2}\) as a virtual control, and define \({\chi _2} = {{\hat{x}}_2} - {a_1} - {D^\alpha }{y_r}\left( t \right) \). Then, we have
Consider the following Lyapunov function
where \({\gamma _1} > 0\) is a design parameter and \(\left| {{\chi _1}} \right| \le {k_{{b_1}}}\) with \({k_{{b_1}}} = {k_{{c_1}}} - {A_1}\).
Remark 2
The \({V_1}\) is positive-definite and continuous in the region \(\left| {{\chi _1}} \right| < {k_{{b_1}}}\), which is introduced to limit the tracking error \({\chi _1}\) and constrain the system state \({x_1}\).
From Eqs. (14), (16), Lemmas 4, 5 and 6, the \(\alpha th\) Caputo fractional derivative of \({V_1}\) is
According to Lemma 6 and \(\ln \frac{{k_{{b_1}}^2}}{{k_{{b_1}}^2 - \chi _1^2}}\) is convex when \({h_1} = \ln \frac{{k_{{b_1}}^2}}{{k_{{b_1}}^2 - \chi _1^2}},{h_2} = \chi _1^{}\), we obtain
Then we have
According to the Youngs inequality and Assumption 2, we get
Substituting (21) into (20), one can obtain
Design virtual controller \({a_1}\) and the adaptation law \({\theta _1}\) as
where \({c_1} > 0\) and \({\sigma _1} > 0\) are the design parameters.
Substituting (23) and (24) into (22) results in
where \({\rho _1} = \frac{1}{2}\left( {{{\left\| {P\delta } \right\| }^2}\mathrm{{ + }}{\bar{\varepsilon }} _1^2} \right) \).
Step 2: Differentiating \({\chi _2} = {{\hat{x}}_2} - {a_1} - {D^\alpha }{y_r}\left( t \right) \) yields
Consider the following Lyapunov function
where \({\gamma _2} > 0\) is a design parameter and \(k_{{b_2}}^{}\) is defined later.
According to Lemma 6, (25) and (26), we have the \(\alpha th\) Caputo fractional derivative of \({V_2}\) as
Due to the Youngs inequality, we have
Substituting (29) into (28) yields
Define the variable as \({\chi _3} = {{\hat{x}}_3} - {a_2} - {D^{2\alpha }}{y_r}\left( t \right) \), and choose the virtual controller \({a_2}\) and the adaptation law \({\theta _2}\) as
where \({c_2} > 0\) and \({\sigma _2} > 0\) are the design parameters.
From (30), (31) and (32), we have
where \({\rho _2}\mathrm{{ = }}{\rho _1}\mathrm{{ + }}\frac{1}{2}{\bar{\varepsilon }} _2^2\mathrm{{ + }}\frac{1}{2}{\bar{\delta }} _2^2\).
Step \(i,3 \le i \le n - 1\): Using a similar procedure recursively in each step, define \({\chi _i} = {{\hat{x}}_i} - {a_{i - 1}} - {D^{\left( {i - 1} \right) \alpha }}{y_r}\left( t \right) \) and we get
Consider the following Lyapunov function
where \({\gamma _i} > 0\) is a design parameter and \(k_{{b_i}}^{}\) is defined later.
By (34) and (35), we have the \(\alpha th\) Caputo fractional derivative of \({V_i}\) as
Using the Youngs inequality, we have
Substituting (37) into (36) yields
Let \({\chi _{i + 1}} = {{\hat{x}}_{i + 1}} - {a_i} - {D^{i\alpha }}{y_r}\left( t \right) \), and design the virtual controller \({a_i}\) and adaptation law \({\theta _i}\) as
where \({c_i} > 0\) and \({\sigma _i} > 0\) are the design parameters.
From (38), (39) and (40), we have
where \({\rho _i}\mathrm{{ = }}{\rho _{i - 1}}\mathrm{{ + }}\frac{1}{2}{\bar{\varepsilon }} _i^2\mathrm{{ + }}\frac{1}{2}{\bar{\delta }} _i^2\).
Step n: In this final step, the actual controller u will be designed. Let \({\chi _n} = {{\hat{x}}_n} - {a_{n - 1}} - {D^{\left( {n - 1} \right) \alpha }}{y_r}\left( t \right) \), and we obtain
Consider the Lyapunov function as follow
where \({\gamma _n} > 0\) is a design parameter and \(k_{{b_n}}^{}\) is defined later.
According to (42) and (43), we have the \(\alpha th\) Caputo fractional derivative of \({V_n}\) as
Using the Youngs inequality, we get
Substituting (45) into (44) yields
Design the control u and the adaptation law \({\theta _n}\) as
where \({c_n} > 0\) and \({\sigma _n} > 0\) are the design parameters.
From (46), (47) and (48), we have
where \({\rho _n}\mathrm{{ = }}{\rho _{n - 1}}\mathrm{{ + }}\frac{1}{2}{\bar{\varepsilon }} _n^2\mathrm{{ + }}\frac{1}{2}{\bar{\delta }} _n^2\).
Based on the Youngs inequality, we obtain
Using Lemma 7, we have
Then, we have
From (17), (27), (35) and (43), we have
Let
Then, (52) becomes
Theorem 1
Using Assumption 1, 2 and if the initial conditions satisfy \({x_i}\left( 0 \right) \in {\Omega _x} = \left\{ {\left. {{x_i}} \right| \left| {{x_i}\left( 0 \right) } \right| < {k_{{c_i}}}} \right\} \), the adaptive fuzzy control scheme described by the state observer (13), the adaptive controller (47) with virtual controllers (23), (31) and (39), and adaptation laws (24), (32), (40), and (48) guarantee that (1) the all the signals of the closed-loop system are bounded; (2) all the states \(x\left( t \right) \) of system are never violated; (3) the closed-loop error signal \(\chi _i^{}\) will remain within the compact set \({\Omega _\chi } = \left\{ {\left. {{\chi _i}} \right| \left| {{\chi _i}} \right| \le k_{{b_k}}^{}\sqrt{1 - {e^{ - 2{V_n}\left( 0 \right) {E_{\left( {\alpha ,1} \right) }}\left( { - c{t^\alpha }} \right) - 2\frac{{\lambda \vartheta }}{c}}}} ,i = 1,2, \ldots ,n} \right\} \).
Proof
According to Lemma 3 and (55), it is easily to obtain
Using Lemma 2, we have
From (43) and the inequation (57), we obtain the boundedness of \(\ln \frac{{k_{{b_k}}^2}}{{k_{{b_i}}^2 - \chi _i^2}}\), thus \(\left| {\chi _i^{}} \right| \) remains in the set \(\left| {\chi _i^{}} \right| < k_{{b_i}}^{}\). Also, it holds that \({\tilde{x}}\) and \({{{\tilde{\theta }}} _i}\) are bounded, \(i = 1,2, \ldots ,n\). Then \({\hat{x}}\) and \({\theta _i}\) are bounded since \({\hat{x}} = x - {\tilde{x}}\) and \({\theta _i} = \theta _i^* - {{{\tilde{\theta }}} _i}\).
As \({\chi _1}\) and \({y_r}\left( t \right) \) are bounded and \({x_1} = {\chi _1} + {y_r}\left( t \right) \), we obtain that the state \({x_1}\) is bounded. Due to (23), virtual controller \({a_1}\) is the function of \({\chi _1},\theta _1^{\mathrm{T}}\), and \({\hat{\underline{x}}_1}\). Then, virtual controller \({a_1}\) is also bounded and the supremum \({{\bar{a}}_1}\) of \({a_1}\) exists. From the definition of \({\chi _2} = {x_2} - {a_1}\) we can know that \({x_2}\) is bounded. Similarly, the boundedness of system states \({x_i},i = 3, \ldots ,n\), the virtual controllers \({a_i},i = 2, \ldots ,n\) and the actual controller u are obtained.
From \({x_1} = {\chi _1} + {y_r}\left( t \right) \) and \(\left| {{y_r}\left( t \right) } \right| \le {A_1}\), we have \(\left| {{x_1}} \right| \le \left| {{\chi _1}} \right| + \left| {{y_r}\left( t \right) } \right| < {k_{{b_1}}} + {A_1}\). Define \({k_{{b_1}}} = {k_{{c_1}}} - {A_1}\), and we get \(\left| {{x_1}} \right| < {k_{{c_1}}}\). As \({x_2} = {\chi _2} + {a_1}\) and \(\left| {{a_1}} \right| \le {{\bar{a}}_1}\), it can obtain that \(\left| {{x_2}} \right| \le \left| {{\chi _2}} \right| + \left| {{a_1}} \right| < {k_{{b_2}}} + {{\bar{a}}_1}\). Define \({k_{{b_2}}} = {k_{{c_2}}} - {{\bar{a}}_1}\), and we get \(\left| {{x_2}} \right| \le {k_{{c_2}}}\). Likewise, we can in turn prove that \(\left| {{x_i}} \right| \le {k_{{c_i}}}\), \(i = 3, \ldots ,n\). Thus, the system states are not violated.
On the other hand, the following inequalities hold from (53) and (56)
These imply that
Then, we obtain that \({\chi _i}\) and \({\tilde{x}}\) can be made arbitrarily small by selecting the design parameters appropriately. In summary, all the signals in the closed-loop system are bounded. This completes the proof. \(\square \)
5 Simulation
Consider the fractional-order nonlinear systems as follows
where \({x_1}\) and \({x_2}\) are the system states, u is the control input, y is the output of systems, \(0.1\cos \left( t \right) \) and \(0.03\sin \left( t \right) \) are the external disturbances, and \(\alpha \mathrm{{ = }}0.8\). The state constraints are given as \({k_{{c_1}}}\mathrm{{ = }}1\) and \({k_{{c_2}}}\mathrm{{ = }}1.5\). The reference signal is defined as \({y_r}\left( t \right) = 0.6\sin \left( t \right) \), and the initial states are chosen as \({x_1}\left( 0 \right) = 0\) and \({x_2}\left( 0 \right) = 0\). The fuzzy state observer is designed as
where the initial values are chosen as \({{\hat{x}}_1}\left( 0 \right) = 0\) and \({{\hat{x}}_2}\left( 0 \right) = 0\).
Choose the fuzzy membership functions as
Adaptive fuzzy controller with adaptation laws is designed as
where \({\chi _1} = y - {y_r}\left( t \right) ,{\chi _2} = {{\hat{x}}_2} - {a_1} - {D^\alpha }{y_r}\left( t \right) \). The initial values of adaptation laws are chosen as \({\theta _1}\left( 0 \right) = {0_{7 \times 1}}\) and \({\theta _2}\left( 0 \right) = {0_{49 \times 1}}\).
The design parameters are chosen as \({l_1} = 110,{l_2} = 115,{\gamma _1} = {\gamma _2} = 0.5,{\sigma _1} = {\sigma _1} = 0.1,{c_1} = {c_2} = 1\), and we can obtain \({k_{{b_1}}} = {k_{{c_1}}} - {A_1}\) and \({k_{{b_2}}} = {k_{{c_2}}} - {A_2}\) according to the Matlab routine.
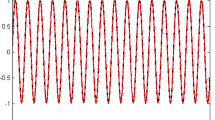
Figures 1, 2, 3, 4, and 5 show corresponding simulation results by the proposed controller. Figure 1 is shown to explain the system tracking trajectories of system output y and reference signal \({y_r}\left( t \right) \), and it can be observed from this figure that a good tracking performance for rapid convergence is implemented. Figures 2 and 3 are used to illustrate the trajectories of the system states \({x_1}\) and \({x_2}\), and the designed observer states \({{\hat{x}}_1}\) and \({{\hat{x}}_2}\). It can be seen that \({{\hat{x}}_1}\) and \({{\hat{x}}_2}\) are designed to estimate \({x_1}\) and \({x_2}\), respectively, and the state variables are not to violate their constraint bounds. The controller input u and the norm of parameters estimation of the FLS are diagrammed in Figs. 4 and 5, and they are bounded in the closed-loop adaptive system.

Trajectories of system output y and tracking signal \({y_r}\left( t \right) \)

State trajectory \({x_1}\) and the tracking signal \({{\hat{x}}_1}\)

State trajectory \({x_2}\) and the tracking signal \({{\hat{x}}_2}\)

Evolution of the norm of the parameters estimation of the FLS

Evolution of the control input
6 Conclusion
An adaptive output feedback scheme for triangular uncertain fractional-order nonlinear systems subject to full-state constraints and unmeasurable states has been developed in this article. Using the FLSs, a fractional-order adaptive fuzzy state observer is constructed to overcome the difficulty of the unmeasured states, and a novel controller is designed on the basis of the backstepping recursive procedure using Barrier Lyapunov method. All the signals in the closed-loop system including the tracking errors, the observer error, the fuzzy parameters and the controller are bounded. The tracking performance and all fractional-order states constrained in the given sets can be guaranteed. Finally, the simulation results illustrate the performances of the proposed control approach.
References
Park, J., Sandberg, I.W.: Universal approximation using radial-basis-function networks. Neural Comput. 3(2), 246–257 (1991)
Wang, Z.-P., Wu, H.-N.: Sampled-data fuzzy control with guaranteed cost for nonlinear parabolic pde systems via static output feedback. IEEE Trans. Fuzzy Syst. 28(10), 2452–2465 (2020). https://doi.org/10.1109/TFUZZ.2019.2939961
Chen, B., Liu, X., Liu, K., Lin, C.: Direct adaptive fuzzy control of nonlinear strict-feedback systems. Automatica 45(6), 1530–1535 (2009)
Wang, Z.-P., Wu, H.-N., Huang, T.: Sampled-data fuzzy control for nonlinear delayed distributed parameter systems. IEEE Trans. Fuzzy Syst. 1, 1 (2020). https://doi.org/10.1109/TFUZZ.2020.3012392
Lee, T.H., Harris, C.J.: Adaptive Neural Network Control of Robotic Manipulators, vol. 19. World Scientific, Singapore (1998)
Zhang, T., Ge, S.S., Hang, C.C.: Adaptive neural network control for strict-feedback nonlinear systems using backstepping design. Automatica 36(12), 1835–1846 (2000)
Tang, J., Yu, S., Liu, F., Chen, X., Huang, H.: A hierarchical prediction model for lane-changes based on combination of fuzzy c-means and adaptive neural network. Expert Syst. Appl. 130, 265–275 (2019)
Xia, J., Li, B., Su, S., Sun, W., Shen, H.: Finite-time command filtered event-triggered adaptive fuzzy tracking control for stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 1, 1 (2020)
Yu, X., He, W., Li, H., Sun, J.: Adaptive fuzzy full-state and output-feedback control for uncertain robots with output constraint. IEEE Trans. Syst. Man Cybern. 1, 14 (2020)
Li, K., Li, Y.M., Zong, G.: Adaptive fuzzy fixed-time decentralized control for stochastic nonlinear systems. IEEE Trans. Fuzzy Syst. 1, 1 (2020)
Wang, Z.-P., Wu, H.-N., Li, H.-X.: Fuzzy control under spatially local averaged measurements for nonlinear distributed parameter systems with time-varying delay. IEEE Trans. Cybern. 51(3), 1359–1369 (2021). https://doi.org/10.1109/TCYB.2019.2916656
Wang, Z.-P., Wu, H.-N., Huang, T.: Spatially local piecewise fuzzy control for nonlinear delayed dpss with random packet losses. IEEE Trans. Fuzzy Syst. (2021). https://doi.org/10.1109/TFUZZ.2021.3061142
Ma, H., Li, H., Liang, H., Dong, G.: Adaptive fuzzy event-triggered control for stochastic nonlinear systems with full state constraints and actuator faults. IEEE Trans. Fuzzy Syst. 27(11), 2242–2254 (2019)
Sun, W., Su, S., Wu, Y., Xia, J., Nguyen, V.: Adaptive fuzzy control with high-order barrier Lyapunov functions for high-order uncertain nonlinear systems with full-state constraints. IEEE Transactions on Cybernetics 50(8), 3424–3432 (2020)
Wang, W., Tong, S.: Adaptive fuzzy containment control of nonlinear strict-feedback systems with full state constraints. IEEE Trans. Fuzzy Syst. 27(10), 2024–2038 (2019)
Zhao, K., Song, Y., Zhang, Z.: Tracking control of mimo nonlinear systems under full state constraints: a single-parameter adaptation approach free from feasibility conditions. Automatica 107, 52–60 (2019). https://doi.org/10.1016/j.automatica.2019.05.032
Qiu, J., Sun, K., Rudas, I.J., Gao, H.: Command filter-based adaptive nn control for mimo nonlinear systems with full-state constraints and actuator hysteresis. IEEE Trans. Cybern. 50(7), 2905–2915 (2020)
Freeborn, T.J., Maundy, B., Elwakil, A.S.: Fractional-order models of supercapacitors, batteries and fuel cells: a survey. Mater. Renew. Sustain. Energy 4(3), 9 (2015)
Podlubny, I.: Fractional Differential Equations. Academic Press, New York (1999)
Shen, J., Lam, J.: Non-existence of finite-time stable equilibria in fractional-order nonlinear systems. Automatica 50(2), 547–551 (2014)
Duarte-Mermoud, M.A., Aguila-Camacho, N., Gallegos, J.A., Castro-Linares, R.: Using general quadratic Lyapunov functions to prove Lyapunov uniform stability for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 22(1–3), 650–659 (2015)
Bao, H.B., Cao, J.D.: Projective synchronization of fractional-order memristor-based neural networks. Neural Netw 63, 1–9 (2015)
Pan, Y., Yu, H.: Composite learning from adaptive dynamic surface control. IEEE Trans. Automat. Control 61(9), 2603–2609 (2016)
Gao, Z.: Robust stabilization criterion of fractional-order controllers for interval fractional-order plants. Automatica 61, 9–17 (2015)
Li, Y., Chen, Y.Q., Podlubny, I.: Mittag-leffler stability of fractional order nonlinear dynamic systems. Automatica 45(8), 1965–1969 (2009)
Boroujeni, E.A., Momeni, H.R.: Non-fragile nonlinear fractional order observer design for a class of nonlinear fractional order systems. Signal Process. 92(10), 2365–2370 (2012)
Yang, Y., Chen, G.: Finite-time stability of fractional order impulsive switched systems. Int. J. Robust Nonlinear Control 25(13), 2207–2222 (2015)
Chen, Y., Vinagre, B.M., Podlubny, I.: Continued fraction expansion approaches to discretizing fractional order derivatives–an expository review. Nonlinear Dyn. 38(1–4), 155–170 (2004)
M. n. Efe, : Fractional order systems in industrial automation–a survey. IEEE Trans. Ind. Inf. 7(4), 582–591 (2011)
Aounallah, T., Essounbouli, N., Hamzaoui, A., Bouchafaa, F.: Algorithm on fuzzy adaptive backstepping control of fractional order for doubly-fed induction generators. Iet Renew. Power Gen. 12(8), 962–967 (2018)
Chen, M., Jiang, C., Wu, Q.: Backstepping control for a class of uncertain nonlinear systems with neural network. Int. J. Nonlinear Sci. 3(2), 137–143 (2007)
Shao, S., Chen, M., Chen, S., Wu, Q.: Adaptive neural control for an uncertain fractional-order rotational mechanical system using disturbance observer. IET Control Theory Appl. 10(16), 1972–1980 (2016)
Mirzajani, S., Aghababa, M.P., Heydari, A.: Adaptive t-s fuzzy control design for fractional-order systems with parametric uncertainty and input constraint. Fuzzy Sets Syst. (2018)
Liu, H., Li, S., Wang, H., Sun, Y.: Adaptive fuzzy control for a class of unknown fractional-order neural networks subject to input nonlinearities and dead-zones. Inf. Sci. 454–455, 30–45 (2018)
Song, S., Park, J.H., Zhang, B., Song, X., Zhang, Z.: Adaptive command filtered neuro-fuzzy control design for fractional-order nonlinear systems with unknown control directions and input quantization. IEEE Trans. Syst. Man Cybern. 1, 1—12,(2020)
Dadras, S., Momeni, H.R.: Control of a fractional-order economical system via sliding mode. Physica A 389(12), 2434–2442 (2010)
Yin, C., Chen, Y.Q., Zhong, S.M.: Fractional-order sliding mode based extremum seeking control of a class of nonlinear systems. Automatica 50(12), 3173–3181 (2014)
Delghavi, M.B., Shoja-Majidabad, S., Yazdani, A.: Fractional-order sliding-mode control of islanded distributed energy resource systems. IEEE Trans. Sustain. Energy 7(4), 1482–1491 (2016)
Xiong, P.-Y., Jahanshahi, H., Alcaraz, R., Chu, Y.-M., Gómez-Aguilar, J., Alsaadi, F.E.: Spectral entropy analysis and synchronization of a multi-stable fractional-order chaotic system using a novel neural network-based chattering-free sliding mode technique. Chaos Solitons Fractals 144, 110576 (2021)
Cuong, H.M., Dong, H.Q., Trieu, P.V., Tuan, L.A.: Adaptive fractional-order terminal sliding mode control of rubber-tired gantry cranes with uncertainties and unknown disturbances. Mech. Syst. Signal Process. 154, 107601 (2021). https://doi.org/10.1016/j.ymssp.2020.107601
Ladaci, S., Charef, A.: On fractional adaptive control. Nonlinear Dyn. 43(4), 365–378 (2006)
Shi, B., Yuan, J., Dong, C.: On fractional model reference adaptive control. Sci. World J. 2014, 1–8 (2014). https://doi.org/10.1155/2014/521625
Wei, Y., Peter, W.T., Yao, Z., Wang, Y.: Adaptive backstepping output feedback control for a class of nonlinear fractional order systems. Nonlinear Dyn. 86(2), 1047–1056 (2016)
Sheng, D., Wei, Y., Cheng, S., Shuai, J.: Adaptive backstepping control for fractional order systems with input saturation. J. Franklin Inst. 354(5), 2245–2268 (2017)
Wei, M., Li, Y.-X., Tong, S.: Event-triggered adaptive neural control of fractional-order nonlinear systems with full-state constraints. Neurocomputing 412, 320–326 (2020). https://doi.org/10.1016/j.neucom.2020.06.082
Lu, S., Wang, X.: Barrier Lyapunov function-based adaptive neural network control for incommensurate fractional-order chaotic permanent magnet synchronous motors with full-state constraints via command filtering. J. Vibrat. Control. (2020). https://doi.org/10.1177/1077546320962639
Wang, L.X.: Adaptive Fuzzy Systems and Control? Design and Stability Analysis. Englewood Cliffs, Prentice-Hall (1994)
Wang, L.X.: Stable adaptive fuzzy control of nonlinear systems. IEEE Trans. Fuzzy Syst. 1(2), 146–155 (1993)
Das, S.: Functional Fractional Calculus for System Identification and Controls. Springer, Berlin (2008)
Gong, P.: Distributed tracking of heterogeneous nonlinear fractional-order multi-agent systems with an unknown leader. J. Franklin Inst. Eng. Appl. Math. 354(5), 2226–2244 (2017)
Aguila-Camacho, N., Duarte-Mermoud, M.A., Gallegos, J.A.: Lyapunov functions for fractional order systems. Commun. Nonlinear Sci. Numer. Simul. 19(9), 2951–2957 (2014)
Chen, W., Dai, H., Song, Y., Zhang, Z.: Convex Lyapunov functions for stability analysis of fractional order systems. IET Control Theory Appl. 11(7), 1070–1074 (2017)
Ren, B., Ge, S.S., Tee, K.P., Lee, T.H.: Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Trans. Neural Netw. 21(8), 1339–1345 (2010)
Tee, K.P., Ge, S.S., Tay, E.H.: Barrier Lyapunov functions for the control of output-constrained nonlinear systems. Automatica 45(4), 918–927 (2009)
Zouari, F., Ibeas, A., Boulkroune, A., Cao, J., Arefi, M.M.: Adaptive neural output-feedback control for nonstrict-feedback time-delay fractional-order systems with output constraints and actuator nonlinearities. Neural Netw. 105, 256–276 (2018)
Xu, B., Chen, D., Zhang, H., Wang, F.: Modeling and stability analysis of a fractional-order francis hydro-turbine governing system. Chaos Solitons Fractals 75, 50–61 (2015). https://doi.org/10.1016/j.chaos.2015.01.025
Shahvali, M., Azarbahram, A., Naghibi-Sistani, M.-B., Askari, J.: Bipartite consensus control for fractional-order nonlinear multi-agent systems: an output constraint approach. Neurocomputing 397, 212–223 (2020). https://doi.org/10.1016/j.neucom.2020.02.036
Acknowledgements
This paper was supported in part by the Doctoral Program of Shandong Provincial Natural Science Foundation of China (ZR2019BF048), Shandong Provincial Natural Science Foundation of China (ZR2019MEE093), and Yantai Science and Technology Innovation Development Project (2020XDRH094,2021XDHZ077).
Author information
Authors and Affiliations
Corresponding authors
Rights and permissions
About this article

Cite this article
Liang, M., Chang, Y., Zhang, F. et al. Observer-Based Adaptive Fuzzy Output Feedback Control for a Class of Fractional-Order Nonlinear Systems with Full-State Constraints. Int. J. Fuzzy Syst. 24, 1046–1058 (2022). https://doi.org/10.1007/s40815-021-01189-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-021-01189-5