
Abstract
A large class of physical phenomena in biophysics, chemical engineering, and physical sciences are modeled as systems of Fredhold integro-differential equations. In its simplest form, such systems are linear and analytic solutions might be obtained in some cases while numerical methods can be also used to solve such systems when analytic solutions are not possible. For more realistic and accurate study of underlying physical behavior, including nonlinear actions is useful. In this paper, we use the Chebyshev pseudo-spectral method to solve the pattern nonlinear second order systems of Fredholm integro-differential equations. The method reduces the operators to a nonlinear system of equations that can be solved alliteratively. The method is tested against the reproducing kernel Hilbert space (RKHS) method and shows good performance. The present method is easy to implement and yields very good accuracy for using a relatively small number of collocation points.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear systems of second-order boundary value problems appear as models for studying many physical systems in science and engineering. Many techniques have been proposed to solve such systems such as the sinc-collocation method [12, 14], homotopy perturbation-reproducing kernel method [24], variational iteration method [31], continuous genetic algorithm [2], method of [25], the local radial basis functions based differential quadrature collocation method [13], reproducing kernel method [1], hat basis functions [10], Euler polynomials approach [5], Chebyshev operational matrix method [32] and a new algorithm based on reproducing kernel Hilbert space [35]. Simultaneously, system of integral and integro-differential equations has been solved by discrete Adomian decomposition method [9], a spectral collocation method [29], Bernoulli Galerkin matrix method [28], Block-Pulse functions [41], fractional alternative Legendre functions [34], a Jacobi spectral method [44], Chebyshev spectral collocation method [23], Taylor expansion [11] and infinite point and Riemann-Stieltjes integral conditions [15].
We mainly consider the nonlinear second order system of two linear integro-differential equations of Fredholm type on the interval \(x\in (-1,1)\) given by
subject to the following boundary conditions
where \(a\,_{i}(x)\), \(b\,_{i}(x)\), \(c\,_{i}(x)\) and \(d\,_{i}(x)\) are continuous functions and the constants \(\theta 1_{r}\) and \(\theta 2_{r}\) are real. The kernel functions \(K_{ij}\) are Lipschitz continuous over \([-1,1]\times [-1,1]\) and the functions \(f_{j}(x)\) are given source terms. The functions \(R_i(x,y_1,y_2)\) are nonlinear in terms of \(y_1\) and \(y_2\), and we are mainly interested in functions \(R_i\) of the form
for positive integers \(\nu \) and \(\omega \).
In recent years, there is an increasing interest in application and development of the Chebyshev pseudo-spectral methods in many areas in science and engineering. The Chebyshev function theory and methods have been developed by the fundamental work of Daşcioǧlu for solving the linear Fredholm-Volterra integro-differential equations [3]. Daşcioǧlu and Yaslan studied high-order nonlinear ordinary differential equations in [4], El-Gamel presented a Chebyshev collocation method for the twelfth-order boundary-value problems [21], Heydari utilize a new class of nonlinear optimal control problems [27], Karunakar and Chakraverty used partial differential equations [30], Bai et al., applied three-dimensional Helmholtz-type equations [8], Secer and Bakir supported Ginzburg-Landau Equation [37], Bermejo and Sastre illustrated the nonlinear Lithium-ion battery equations [7], Saw and Kumar solved multi-term the fractional order initial value problem [36], Hassani et al., depicted fractional optimal control problems [26], Yiğit and Bayram showed third and fourth-order singular perturbation problems [42], Baccouch and Kaddeche offered Viscous Burgers equations in one and two space dimensions [6], Yousef et al., gave information about a class of Fredholm fractional integro-differential equations [43], Saw and Kumar dissolved space fractional advection dispersion equation [39], Wang et al. presented generalized fractional pantograph equations with variable coefficients [40], Ghimire et al. displayed elliptic partial differential equations [22], El-Gamel and Sameeh exhibited singular two-point boundary value problems [20], El-Gamel et al., two-point BVP in modelling Viscoelastic flows [19], El-Gamel exposed the Eigenvalues of Sturm-Liouville problems in [18], El-Gamel and Sameeh gave the solution of Troeschs problem [17], El-Gamel and Sameeh presented an efficient technique for finding the eigenvalues of fourth-order Sturm-Liouville problems [16] and Öztürk offered a solution for the system of Lane-Emden type equations [33].
The rest of the paper is organized as follows. Section 2 outlines essential formulations of Chebyshev polynomials that are necessary for our proposed method. In Sect. 3, Chebyshev-collocation method is introduced and developed to solve nonlinear systems of second order Fredholm integro-differential equations. Section 4 reports some numerical examples and the efficiency of the method is illustrated in comparison with the RKHS method. Finally, a conclusion of the study is presented in Sect. 5.
2 Preliminaries
The matrix representation of the approximate solutions to the system in Eqs. (1.1) and (1.2) can be written as
where the entries of the matrix \(\varvec{\mathrm {T}}\) and the column vectors \(\varvec{A}_j\) are given by
where the superscript \(\tau \) denotes the matrix transpose. Here \(T_n(x) = \cos (n\arccos (x))\) is the Chebyshev polynomial of degree n, and
are the Chebyshev-Gauss-Lobatto collocation points. An approximation to the nth derivative of a solution \(y_j\) takes the form [38]
The entries of the matrix \(\mathbf {M}\) are given for the case odd and even number N by
For fixed \(x = x_s\), the kernel \(K_{ij}(x,t)\) can be approximated in terms of a Chebyshev series in the variable t by
where the double prime in summation symbol demonstrates a sum with first and last terms divided by two. Together with the relation mentioned in (1.1–1.2), the Chebyshev coefficients \({k}^{ij}_{c}(x_{s})\) are given by
where
As a consequence, \(K_{ij}(x_{s},t)\) can be expressed in the matrix form as
as, \(T(t)^{\tau }\) symbolizes the transpose of T(t). Concerning,
In a similar manner, substituting the relation (2.2), the integrals in Eqs. (1.1) and (1.2) takes the form
Besides, by using the relation [3]
where
The integral \(I_{i}(x_{s})\) in Eq. (2.5) then takes the form
3 Method of solution
The present method mainly depends on estimating the values of Chebyshev coefficients by approximating the operators in Eqs. (1.1–1.2) at the Chebyshev collocation points. This yields a nonlinear system of equations of the form
where
and
similarly \( B_{i}(x(s))\), \( C_{i}(x(s))\) ,\(D_{i}(x(s)) \) , \(G_{i}(x(s))\) and \(H_{i}(x(s))\) .
and
With this in mind, we initially aim to find out the matrix form for Y and I in terms of Chebyshev coefficient matrix. Now, it is important to realize the following two lemma
Lemma 3.1
[4] The following relation holds
where
and
Proof
See [4]. \(\square \)
Lemma 3.2
[21] The following relation holds
Proof
See [21]. \(\square \)
Similarly,

Hence, we can reduplicate nonlinear system of Fredholm integro-differential of \(2(N+1)\) algebraic equations together with anonymous Chebyshev coefficients into the following compact essential relation
In a similar manner, as for the fundamental matrix form of the boundary condition that is attached to Chebyshev coefficients matrix \( \mathbf{A} \) gain the posterior modest form
In conclusion, the last rows of \(\mathbf{Q} \) and \(\mathbf{F} \) is substituted by the four rows of \(\mathbf{V} \) and \(\theta \) respectively. The augmented matrix of this system is
In that case, solving a nonlinear system of \(2(N+1)\) equation leads to figure out not only the matrix \( \mathbf{A} \) of Chebyshev coefficients but also solution of system (1.1–1.2) under the the boundary conditions (1.3). We obtain the approximate solution by following the algorithm in [4] using Matlab.
Algorithm
-
Enter (N) with type integer.
-
Enter (tol) with type double.
-
Enter \( \mathbf{x} _{s}\) collocation points vector with dimension \(( N +1 )\).
-
Enter \(\mathbf{T} \) and \(\mathbf{M} \) arrays with dimension \((( N +1 )\times (N +1))\).
-
Enter \(\overline{\mathbf{T }}\) and \(\overline{\mathbf{M }}\) arrays with dimension \(((N +1)\times (N +1)^2)\) and \((( N +1 )^2\times ( N +1 )^2)\) respectively.
-
Enter \(\mathbf{F} \) vector with dimension \(2( N +1 )\).
-
Set initial approximation \(\mathbf{A} _{I}\) to satisfy the boundary conditions. Let \(\mathbf{A} _{old} = \mathbf{A} _{I} \) with \( 2( N +1 )\) dimension .
-
\(\widetilde{\mathbf{Q }} (\mathbf{A} _{old} ) \mathbf{A} _{new} = \widetilde{\mathbf{F }}\) is a linear algebraic \(2(N+1)\) equations system. Then solve this system to find \(\mathbf{A} _{new}\) .
-
If \(|\mathbf{A} _{old} - \mathbf{A} _{new}| < tol\) then \(\mathbf{A} _{new} = \mathbf{A} \), break. The program is ended.
-
Else then \(\mathbf{A} _{old}\longleftarrow \mathbf{A} _{new}.\)
4 Examples and comparison
Five test examples is constructed so as to clarify the accomplishment Chebyshev method in finding a solution for nonlinear system of ordinary differential equation. Each example comprises a particular characteristic problem with the analytical solution that is known in advance. The first and the second examples present nonlinear system of ODE and the results are compared with the reproducing kernel Hilbert space (RKHS) method [1]. In the third example, we solve a fourth order nonlinear system of integro differential fredholm of the second kind with different three cases. Example 4 and example 5 treat with singular linear and nonlinear system of ODE. We measure the performance of Chebyshev method by the maximum absolute error \(E_{Chebyshev}\) which is defined as
Example 1
[1] This is also a nonlinear system of ODE
under the following boundary condition
whose exact solution is
Table 1 depicts comparison between maximum absolute errors of the proposed method at \(N=10\) and reproducing kernel Hilbert space method (RKHSM) at \(N=51\) for Example 1.
Example 2
[1] This is also a nonlinear system of ODE
under the following boundary condition
whose exact solution is
Table 2 indicates comparison between maximum absolute errors of the proposed method at \(N=10\) and reproducing kernel Hilbert space method (RKHSM) at \(N=51\).
Example 3
This is fourth order nonlinear system of integro differential fredholm of the second kind
under the following boundary condition
whose exact solution is
Case 1 : \(A_{1}=B_{1}=A_{2}=B_{2}=1\) then the system (4.1) will be fourth order nonlinear system of integro differential fredholm equations
Table 3 demonstrates maximum absolute errors of fourth order nonlinear system of integro differential fredholm equations with various values of \(N=6,8,9,10\). The maximum absolute errors in solutions of our aforementioned method are considerable declined along with the increasing of N.
Case 2: \(A_{1}=B_{1}=A_{2}=B_{2}=0\) then the system (4.1) will be For systems of nonlinear differential equations
Table 4 shows maximum absolute errors of systems of nonlinear differential equations with various values of \(N=6,8,9,10\) so as to point out the superiority of our aforementioned method.
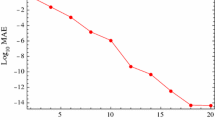
Case 3: \(A_{1}=A_{2}=1\) and \(B_{1}=B_{2}=0\) then the system (4.1) will be nonlinear systems of Fredholm integro-differential equations
Table 5 illustrate the maximum absolute errors of systems of nonlinear Fredholm integro-differential equations with various values of \(N=6,8,9,10\). The maximum absolute errors in solutions of our aforementioned method are considerable declined along with the increasing of N (Figs. 1, 2 and 3).

The numerical results for chebyshev solution for Example 3 case 1 at \(N=6\)

The numerical results for chebyshev solution for Example 4 at \(N=10\)

The numerical results for chebyshev solution for Example 5 at \(N=10\)
Example 4
This is a singular nonlinear system of ODE
under the following boundary condition
whose exact solution is
Maximum absolute errors for Example 4 are tabulated in Table 6 together with different value of N.
Example 5
[33] This is a singular linear system of ODE
under the following boundary condition
whose exact solution is
Table 7 gives an information about the maximum absolute errors for Example 5 in different value of N.
5 Conclusion
Nonlinear systems of Fredholm integro-differential equations appear in many important applications in science and engineering. Due to the complexity of such systems, the search for accurate and efficient methods is necessary. In this paper, we presented a simple-to-implement yet accurate method using the Chebyshev collocation scheme. In view of the aforementioned numerical results, the accuracy of this method is considerably manifest.
Although the method was shown to be successful in handling the class of problems considered in this paper, we believe the extension of this work to treat problems in two or more spatial variables is a challenge for future work. Besides, special treatment should be considered if singular kernels are present.
References
Al-Smadi, M., Abu Arqub, O., Shawagfeh, N., Momani, S.: Numerical investigations for systems of second-order periodic boundary value problems using reproducing kernel method. Appl. Math. Model. 291, 137–148 (2016)
Abu Arqub, O., Abo-Hammour, Z.: Numerical solution of systems of second-order boundary value problems using continuous genetic algorithm. Appl. Math. Inf. Sci. 279, 396–415 (2014)
Akyüz-Daşcioǧlu, A.: A Chebyshev polynomial approach for linear Fredholm-Volterra integro-differential equations in the most general form. Appl. Math. Comput. 181, 103–112 (2006)
Akyüz-Daşcioǧlu, A., çerdik-Yaslan, H.: The solution of high-order nonlinear ordinary differential equations by Chebyshev Series. Appl. Math. Comput. 12, 5658–5666 (2011)
Azodi, H.: Euler polynomials approach to the system of nonlinear fractional differential equations. J. Math. 51, 71–87 (2019)
Baccouch, M., Kaddeche, S.: Efficient Chebyshev pseudospectral methods for Viscous Burgers equations in one and two space dimensions. Int. J. Appl. Comput. Math. 2019, 9 (2019)
Bermejo, R., Sastre, P.: An implicit-explicit Runge-Kutta-Chebyshev finite element method for the nonlinear Lithium-ion battery equations. Appl. Math. Comput. 361, 398–420 (2019)
Bai, A.Z., Gu, A.Y., Fan, C.: A direct Chebyshev collocation method for the numerical solutions of three-dimensional Helmholtz-type equations. Eng. Anal. Bound. Elem. 104, 26–33 (2019)
Bakodah, H., Al-Mazmumy, M., Almuhalbedi, S.: Solving system of integro differential equations using discrete adomain decomposition method. J. Taibah Univer. Sci. 13, 805–812 (2019)
Babolian, E., Mordad, M.: A numerical method for solving systems of linear and nonlinear integral equations of the second kind by hat basis functions. Comput. Math. Appl. 62, 187–198 (2011)
Didgar, M., Vahidi, A., Biazar, J.: An approximate approach for system of fractional intgro-differential equations based on Taylor expansion. Kragujevac J. Math. 44, 379–392 (2020)
Dehghan, M., Saadatmandi, A.: The numerical solution of a nonlinear system of second-order boundary value problems using the sinc-collocation method. Math. Comput. Model. 46, 1434–1441 (2007)
Dehghan, M., Nikpour, A.: Numerical solution of the system of second-order boundary value problems using the local radial basis functions based differential quadrature collocation method. Appl. Math. Model. 37, 8578–8599 (2013)
El-Gamel, M.: Sinc-collocation method for solving linear and nonlinear system of second-order boundary value problems. Appl. Math. 3, 1627–1633 (2012)
El-Sayeda, A., Ahmed, R.: Solvability of a coupled system of functional integro-differential equations with infinite point and Riemann-Stieltjes integral conditions. Appl. Math. Comput. 370, 5 (2020)
El-Gamel, M., Sameeh, M.: An efficient technique for finding the eigenvalues of fourth-order Sturm-Liouville problems. Appl. Math. 3, 920–925 (2012)
El-Gamel, M., Sameeh, M.: A Chebychev collocation method for solving Troesch’s problem. Int. J. Math. Comput. Appl. Res. 3, 23–32 (2013)
El-Gamel, M.: Numerical comparison of sinc-collocation and Chebychev-collocation methods for determining the eigenvalues of Sturm-Liouville problems with parameter-dependent boundary conditions. SeMA J. 66, 29–42 (2014)
El-Gamel, M., Mohamed, O., El-Shamy, N.: A robust and effective method for solving two-point BVP in modelling Viscoelastic flows. AM J. 11, 23–34 (2020)
El-Gamel, M., Sameeh, M.: Numerical solution of singular two-point boundary value problems by the collocation method with the Chebyshev bases. SeMA J. 74, 627–641 (2016)
El-Gamel, M.: Chebychev polynomial solutions of twelfth-order boundary-value problems. Br. J. Math. Comput. Sci. 6, 13–23 (2015)
Ghimire, B., Li, X., Chen, C., Lamichhane, A.: Hybrid Chebyshev polynomial scheme for solving elliptic partial differential equations. Iran. J. Sci. Technol. 364, 9 (2020)
Gu, Z.: Chebyshev spectral collocation method for system of nonlinear Volterra integral equations. Numer. Algor. 2019, 8 (2019)
Geng, F., Cui, M.: Homotopy perturbation-reproducing kernel method for nonlinear systems of second order boundary value problems. Appl. Math. Comput. 235, 2405–2411 (2011)
Geng, F., Cui, M.: Solving a nonlinear system of second order boundary value problems. J. Math. Anal. Appl. 279, 396–415 (2014)
Hassani, H., Machado, J., Naraghirad, E.: Generalized shifted Chebyshev polynomials for fractional optimal control problems. Commun. Nonlin. Sci. Num. Sim. 75, 50–61 (2019)
Heydari, M.: Chebyshev cardinal functions for a new class of nonlinear optimal control problems generated by Atangana-Baleanu-Caputo variable-order fractional derivative. Chaos. Soliton Fract. 130, 5 (2020)
Hesameddini, E., Riahi, M.: Bernoulli Galerkin matrix method and its convergence analysis for solving system of Volterra-Fredholm integro-differential equations. Iran J. Sci. Technol. Trans. Sci. 43, 1203–1214 (2019)
Khan, S., Ali, I.: Convergence and error analysis of a spectral collocation method for solving system of nonlinear Fredholm integral equations of second kind. Comp. Appl. Math. 38, 125–139 (2019)
Karunakar, P., Chakraverty, S.: Shifted Chebyshev polynomials based solution of partial differential equations. SN Appl. Sci. 2019, 8 (2019)
Lu, J.: Variational iteration method for solving a nonlinear system of second-order boundary value problems. Comput. Math. Appl. 54, 1133–1138 (2007)
Öztürk, Y.: An efficient numerical algorithm for solving system of Lane-Emden type equations arising in engineering. Nonlinear Eng. 8, 429–437 (2019)
Öztürk, Y.: Solution for the system of Lane-Emden type equations using Chebyshev polynomials. Math. 2020, 5 (2020)
Rahimkhani, P., Ordokhani, Y.: Approximate solution of nonlinear fractional integro-differential equations using fractional alternative Legendre functions. J. Comp. Appl. Math. 365, 5 (2020)
Sahihi, H., Allahviranloo, T., Abbasbandy, S.: Solving system of second-order BVPs using a new algorithm based on reproducing kernel Hilbert space. Appl. Numer. Math. 151, 27–39 (2020)
Saw, V., Kumar, S.: The approximate solution for multi-term the fractional order initial value problem using Collocation method based on shifted Chebyshev polynomials of the first kind. Inf. Technol. Appl. Math. 699, 53–67 (2019)
Secer, A., Bakir, Y.: Chebyshev Wavelet collocation Method for Ginzburg-Landau Equation. Therm. Sci. 23, 57–65 (2019)
Sezer, M., Kaynak, M.: Chebyshev polynomial solutions of linear differential equations. Int. Math. Educ. Sci. Technol. 27, 607–618 (1996)
Saw, V., Kumar, S.: Second kind Chebyshev polynomials for solving space fractional advection-dispersion equation using Collocation method. Iran. J. Sci. Technol. 43, 1027–1037 (2019)
Wang, L., Chen, Y., Liu, D.: Numerical algorithm to solve generalized fractional pantograph equations with variable coefficients based on shifted Chebyshev polynomials. Int. J. Comput. Math. 2019, 8 (2019)
Xie, J., Yi, M.: Numerical research of nonlinear system of fractional Volterra-Fredholm integral-differential equations via Block-Pulse functions and error analysis. J. Comp. Appl. Math. 345, 159–167 (2019)
Yiǧit, G., Bayram, M.: Chebyshev differential quadrature for numerical solutions of third and fourth-order singular perturbation problems, Proc. Natl. Acad. Sci. India, Sect. A Phys. Sci. (2019)
Yousefi, A., Javadi, S., Babolian, E., Moradi, E.: Convergence analysis of the Chebyshev-Legendre spectral method for a class of Fredholm fractional integro-differential equations. J. Comput. Appl. Math. 358, 97–110 (2019)
Zaky, M., Ameen, I.: A priori error estimates of a Jacobi spectral method for nonlinear systems of fractional boundary value problems and related Volterra-Fredholm integral equations with smooth solutions. Numer. Algor. 2019, 5 (2019)
Acknowledgements
The authors are extremely grateful to Dr. Amgad Abdrabou for some feedback about referees suggestions and to the referees for their helpful suggestions and comments.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
El-Gamel, M., Mohamed, O. Nonlinear second order systems of Fredholm integro-differential equations. SeMA 79, 383–396 (2022). https://doi.org/10.1007/s40324-021-00258-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40324-021-00258-x