
Abstract
In this paper, a class of uncertain chaotic systems preceded by unknown backlash nonlinearity is investigated. Combining backstepping technique with fuzzy neural network identifying, an adaptive backstepping fuzzy neural controller (ABFNC) for uncertain chaotic systems with unknown backlash is proposed. The proposed ABFNC system is comprised of a fuzzy neural network identifier (FNNI) and a robust controller. The FNNI is the principal controller utilized for online estimation of the unknown nonlinear function. The robust controller is used to attenuate the effects of the approximation error so that the stability and control performance of the closed-loop adaptive system is achieved always. Finally, simulation results show that the ABFNC can achieve favorable tracking performances.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The study of chaotic systems has been rapidly expanded during the last two decades. Many fundamental characteristics can be found in a chaotic system, such as excessive sensitivity to initial conditions, broad spectrums of Fourier Transform, and fractal properties of the motion in phase space. Controlling chaotic systems has attracted a great deal of attention within the engineering society, in which different techniques have been proposed. For instance, linear state space feedback [1], Lyapunov function methods [2], adaptive control [3], and bang–bang control [4], among many others [5].
In recent years, adaptive control for uncertain nonlinear systems has received much attention based on universal function approximation, such as neural networks (NNs) or fuzzy logic systems [6–13]. Also, the application of neural networks and fuzzy logic controllers to chaotic systems has been proposed [14–18], which appears to be quite promising.
Recently, the concept of incorporation fuzzy logic into a neural network has grown into a popular research topic [19]. The integrated fuzzy neural network (FNN) system possesses the merits of both fuzzy systems [20] and neural networks [21]. In this way, one can bring the low-level learning and computational power of neural networks into fuzzy systems and also high-level humanlike IF-THEN rule thinking and reasoning of fuzzy systems into neural networks. Moreover, adaptive control schemes of chaotic systems that incorporate the techniques of FNN have also grown rapidly [22–24]. However, the results motivated above in [1–24] did not consider the affection of unknown backlash nonlinearity.
Backlash is one of the most important non-smooth nonlinearities in a wide range of physical systems and devices, such as biology optics, electro-magnetism, mechanical actuators, electronic relay circuits and other areas. The development of control techniques to mitigate effects of unknown backlash has been studied for a long time. To handle with systems with unknown backlash, several adaptive control schemes have recently been proposed, see for examples [25–29]. In [26–28], an adaptive inverse cascaded with the plant was employed to cancel the effects of nonlinearity. In [25], a dynamic backlash model is defined to pattern a backlash rather than constructing an inverse model to mitigate the effects of the backlash. However in [25], the term multiplying the control and the uncertain parameters of the system must be within known intervals and the ‘disturbance-like’ term must be bounded by a known bound. Projection was used to handle the ‘disturbance-like’ term and unknown parameters. System stability was established and the tracking error was shown to converge to a residual. In [29], the backstepping adaptive control schemes for uncertain nonlinear systems with unknown backlash nonlinearity were proposed. However, this result in [29] required the nonlinear functions of systems are known.
In this paper, an adaptive backstepping fuzzy neural controller (ABFNC) is proposed for a class of uncertain chaotic systems with unknown nonlinear functions and backlash nonlinearity. The unknown nonlinear functions are approximated by the FNN. In the design, the term multiplying the control and the system parameters are not assumed to be within known intervals. The bound of the ‘disturbance-like’ term is not required. To handle such a term, an estimator is used to estimate its bound. Based on the Lyapunov stability theory, the adaptive control law is derived. The global stability of the chaotic system is achieved. Finally, simulation results are presented to demonstrate the effectiveness of the proposed control scheme.
2 Problem statement
The controlled system consists of a chaos system preceded by a backlash-like hysteresis actuator, that is, the hysteresis is present as an input of the chaos system. It is a challenging task of major practical interests to develop a control scheme for unknown backlash-like hysteresis. The development of such a control scheme will now be pursued.
A backlash-like hysteresis nonlinearity can be denoted as an operator as follows:
with \( v(t) \) as input and \( u(t) \) as output. The operator \( P(v(t)) \) will be discussed in detail in the next section. The uncertain chaos system being preceded by the above hysteresis is described in the canonical form
where \( \varvec{X} = \left[ {x_{1} ,\dot{x}_{1} , \ldots ,x_{1}^{{\left( {n - 1} \right)}} } \right]^{\text{T}} = \left[ {x_{1} ,x_{2} , \ldots ,x_{n} } \right]^{\text{T}} \in \varvec{R}^{n} \) is the state vector, \( f\left( \varvec{X} \right) \) is unknown nonlinear bounded function, \( \bar{d}\left( t \right) \) denotes bounded external disturbances. The control objective is to design a control law for \( v(t) \) in Eq. (1), to force the uncertain chaotic system (2) state vector to follow a specified desired trajectory, \( \varvec{X}_{d} = \left[ {x_{d} ,\dot{x}_{d} , \cdots x_{d}^{(n - 1)} } \right]^{\text{T}} \), i.e., \( \varvec{X} \to \varvec{X}_{d} \) as \( t \to \infty \).
Remark:
A class of chaos systems can be described by the nonlinear system (2), such as Duffing chaotic system, Van der Pol chaotic system, Jerk systems and so on.
3 Backlash-like hysteresis model and its properties
Traditionally, a backlash hysteresis nonlinearity can be described by
where \( c > 0 \) is the slope of the lines and \( B > 0 \) is the backlash distance, \( u(t_{ - } ) \)is delay input. This mode is itself discontinuous and may not be amenable to controller design for the chaotic systems (2).
Instead of using the above model, in this paper we use a continuous-time dynamic model to describe a class of backlash-like hysteresis [25], as given by
where \( \alpha > 0 \) is the switch rate, \( B_{1} > 0 \) is the backlash distance, \( c > 0 \) is the slope of the lines satisfying \( c > B_{1} \).
Remark:
This backlash-like hysteresis mode is reported by Ref. [25], to read conveniently, we give the main results that from Ref. [25].
Equation (4) can be solved explicitly for \( v \) piecewise monotone,
With \( d_{1} \left( v \right) = \left[ {u_{0} - cv_{0} } \right]e^{{ - \alpha \left( {v - v_{0} } \right){\text{sign}}\left( {\dot{v}} \right)}} + e^{{ - \alpha v{\text{sign}}\left( {\dot{v}} \right)}} \int_{{v_{0} }}^{v} {\left[ {B_{1} - c} \right]} e^{{\alpha \xi {\text{sign}}\left( {\dot{v}} \right)}} d\xi , \) for \( \dot{v} \) constant and \( u\left( {v_{0} } \right) = u_{0} \). Analyzing Eq. (5), we see that it is composed of a line with the slop \( c \), together with a term \( d_{1} \left( v \right) \). For \( d_{1} \left( v \right) \), it can be easily shown that if \( u\left( {v;v_{0} ,u_{0} } \right) \) is the solution of Eq. (5) with initial values \( \left( {v_{0} ,u_{0} } \right) \), then, if \( \dot{v} > 0(\dot{v} < 0) \) and \( v \to + \infty \left( { - \infty } \right) \), one has
where \( g(v) = cv(t) \). It should be noted that the above convergence is exponential at the rate of \( \alpha \). Solution (5) and properties (6) and (7) show that \( u(t) \) eventually satisfied the first and the second conditions of (3). Furthermore, setting \( \dot{v} = 0 \) results in \( \dot{u} = 0 \) which satisfied the last condition of (3). This implies that the dynamic Equation (4) can be used to model a class of backlash-like hysteresis and is an approximation of backlash hysteresis (3).Let us use an example for specified initial data to show the switching mechanism for the dynamic model (4) when \( \dot{v} \) changes direction. We note that when \( \dot{v} > 0 \) on \( u(0) = 0 \) and \( v(0) = 0 \), Eq. (5) gives
Let \( v_{s} \) be a positive value of \( v \) and consider now a specimen such that \( v \) is increasing along the initial curve (8) until a time \( t_{s} \) at which \( v \) reaches the level \( v_{s} \). Suppose now that from the time \( t_{s} \), the signal \( v \) is decreased. In this case, \( u \) is given by
where \( v < v_{s} \). Eqs. (8) and (9) indeed show that \( u \) switches exponentially from the line \( cv(t) - ({{(c - B_{1} )} \mathord{\left/ {\vphantom {{(c - B_{1} )} \alpha }} \right. \kern-0pt} \alpha }) \) to \( cv(t) + ({{(c - B_{1} )} \mathord{\left/ {\vphantom {{(c - B_{1} )} \alpha }} \right. \kern-0pt} \alpha }) \) to generate backlash-like hysteresis curves.
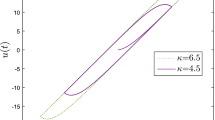
To confirm the above analysis, the solutions of Eq. (4) can be obtained by numerical integration with \( v \) as the independent variable. Figures 1, 2 shows that model (4) indeed generates backlash-like hysteresis curves, which confirms the above analysis. The details are described in the section of simulation studies. It should be mentioned that the parameter \( \alpha \) determines the rate at which \( u(t) \) switches between \( - ({{(c - B_{1} )} \mathord{\left/ {\vphantom {{(c - B_{1} )} \alpha }} \right. \kern-0pt} \alpha }) \) and \( ({{(c - B_{1} )} \mathord{\left/ {\vphantom {{(c - B_{1} )} \alpha }} \right. \kern-0pt} \alpha }) \). The larger the parameter \( \alpha \) is, the faster the transition in \( u(t) \) is going to be. However, the backlash distance is determined by \( ({{(c - B_{1} )} \mathord{\left/ {\vphantom {{(c - B_{1} )} \alpha }} \right. \kern-0pt} \alpha }) \) and the parameter must satisfy \( c > B_{1} \). Therefore, the parameter \( \alpha \) cannot be chosen freely. A compromise should be made in choosing a suitable parameter set \( \left\{ {\alpha ,c,B_{1} } \right\} \) to model the required shape of backlash-like hysteresis.

Hysteresis curves given by (4) with \( \alpha = 1 \), \( c = 3.1635 \), and \( B_{1} = 0.345 \) for \( v\left( t \right) = k{ \sin }\left( {2.3t} \right) \) with \( k = 2.5,\;3.5,\;4.5,\;5.5,\;{\text{and}}\; 6. 5 \)

Fuzzy partitions of two-dimensional input space. a Grid-type partitioning. b If-then rules based on grid-type partitioning. c Clustering-type partitioning. d If-then rules based on clustering-type partitioning
4 Fuzzy neural network
According to the method of input space partition, fuzzy neural networks are divided into two categories: grid-based partitioning and clustering-based partitioning [30]. In this paper, the grid-based partitioning FNN is used to identify the unknown nonlinear function \( f\left( \varvec{X} \right) \). The structure of the FNN has four layers of neural network: the input, the membership function, the rule and the output layers. The interactions for those layers are given as follows.
Layer 1: For every node \( i \), in this layer, the net input and the net output are represented as
where \( x_{i}^{1} \) represents the ith input to the node of layer 1, and \( L \) is the total number of input variables.
Layer 2: In this layer, each node performs a membership function and acts as a unit of memory. The Gaussian function is adopted as the membership function. For the ith input, the corresponding net input and output of the jth node can be expressed as
where \( m_{ij}^{2} \) is the mean, \( \sigma_{ij}^{2} \) is the standard deviation and \( M \) is the total number of membership functions with respect to the respective input node.
Layer 3: The links in this layer are used to implement the antecedent matching. The matching operation or the fuzzy AND aggregation operation is chosen as the simple PRODUCT operation instead of the MIN operation. Then, for the kth rule node
where \( x_{i}^{3} \) and \( x_{j}^{3} \) represent the i, jth input to the kth node of layer 3 respectively, and \( N \) is the total number of fuzzy rules.
Layer 4: Since the overall net output is a linear combination of the consequences of all rules, the net input and output are simply defined by
where \( w_{k}^{4} \) is the output action strength of the output associated with the kth rule, \( x_{k}^{4} \) represents the kth input to the node of layer 4 and \( y_{o}^{4} \) is the output of SFNN.
According to the gradient descent method [31], we will give the learning law for each layer in the feedbackward direction. The derivation is the same as that of the back-propagation learning law. To describe the algorithm more clearly, we consider two inputs and one output.
Layer 4: If the cost function to be minimized is defined as
where \( d \) is the desired output and \( y_{o}^{4} \) is the current output of FNN, the error term to be propagated is given by
Then, the weight \( w_{k}^{4} \) is updated by the amount
where \( y_{k}^{3} \) denote the output of layer 3, and N is the total number of fuzzy rules.
Layer 3: Since the weights in this layer are unity, none of them is to be modified. Only the error term needs to be calculated and propagated.
Layer 2: The multiplication operation is done in this layer. The adaptive rule for \( m_{ij} \) and \( \sigma_{ij} \) are as follows. First, the error term is computed,
where the subscript k denotes the rule node in connection with the ith node in Layer 2, \( y_{1}^{2} \) denote the membership of first input, and \( y_{2}^{2} \) denote the membership of second input. Then, the adaptive rule of \( m_{ij} \) is
and the adaptive rule of \( \sigma_{ij} \) is
Remark:
This fuzzy neural network is reported by Refs. [30, 31]. The interesting readers are referred to Refs. [30, 31] for a more detailed explanation of the network.
5 The ABFNC design and stability analysis
From the solution structure (5) of the model (4) we see that the signal \( u(t) \) is expressed as a linear function of input signal \( v(t) \) plus a bounded term. Using the solution expression (5), system (2) becomes
where \( d\left( t \right) = d_{1} \left( {v\left( t \right)} \right) + \bar{d}\left( t \right) \). The effect of \( d\left( t \right) \) is due to both external disturbances and \( d_{1} \left( {v\left( t \right)} \right) \). We call \( d\left( t \right) \) a ‘disturbance-like’ term for simplicity of presentation. The uncertain parameter \( c \) is not assumed inside known intervals, also the bound \( D \) for \( d\left( t \right) \) is not assumed to be known and it will be estimated by our adaptive controllers. Furthermore, fuzzy neural adaptive control techniques can be utilized for the controller design. In this section, we shall utilize backstepping technique with fuzzy neural network identifying, and design the adaptive backstepping fuzzy neural controller (ABFNC) for uncertain chaotic systems with unknown backlash.
For the development of control laws, the following assumption is made.
Assumption 1
The desired trajectory \( \varvec{X}_{d} \left( t \right) \) and its nth order derivatives are known and bounded.
Before presenting the adaptive fuzzy neural controller design using the backstepping technique to achieve the desired control objectives, the following change of coordinates is made.
where \( \beta_{i - 1} \) is the virtual control at the ith step and will be determined in later discussion. To illustrate the backstepping procedures, only the last step of the design, i.e. step n below, is elaborated in details.
Step 1: For \( i = 2 \), it follows from Eqs. (25), (26) and (27) that
We design the virtual control law \( \beta_{1} \) as
where \( a_{1} \) is a positive design parameter. From Eqs. (28) and (29) we have
Step i (i = 2,…,n − 1): Choose virtual control law \( \beta_{i} \) as
where \( a_{i} ,i = 2, \ldots ,n - 1 \) are positive design parameters. From Eqs. (27) and (31) we obtain
Step n: From Eqs. (25) and (27) we obtain
In this paper, we use FNN to identify the unknown function \( f\left( \varvec{X} \right) \). Now consider the following optimal parameter vectors
where \( \varvec{\xi}(\varvec{X}) \) denote the layer 4 input vector, \( \varvec{W}^{4} \) is the link weight vector between layer 3 and layer 4; \( \hat{f}\left( {\left. \varvec{X} \right|\hat{\varvec{W}}^{4} } \right) = (\hat{\varvec{W}}^{ 4} \text{)}^{\text{T}}\varvec{\xi}\text{(}\varvec{X}\text{)} \) is the output of FNN, which is used to estimate the unknown nonlinear function \( f\left( \varvec{X} \right) \) in system (25). Defining the minimum approximation error as
and \( \left| \varepsilon \right| \le \bar{\varepsilon } \), where \( \bar{\varepsilon } \) is positive constant.
We design the adaptive fuzzy neural controller \( v \) as follows:
with\( \bar{v} = - a_{n} e_{n} - e_{n - 1} - (\hat{\varvec{W}}^{4} )^{\text{T}}\varvec{\xi}\left( \varvec{X} \right) - {\text{sign}}\left( {e_{n} } \right)\hat{D} + x_{d}^{\left( n \right)} + \dot{\beta }_{n - 1} + v_{s} , \)where sign() denote signal function, \( v_{s} = - {\text{sign}}(e_{n} )\bar{\varepsilon } \), the robust controller \( v_{s} \) is used to attenuate the effects of the approximation error so that the stability and control performance of the closed-loop adaptive system is achieved always. The parameter adaptive laws are given by
where \( a_{n} \), \( \gamma \) and \( \eta \) are three positive design parameters, \( \hat{C} \), \( \hat{\varvec{W}}^{4} \) and \( \hat{D} \) are estimates of \( {1 \mathord{\left/ {\vphantom {1 c}} \right. \kern-0pt} c} \), \( \varvec{W}^{4*} \) and \( D \). Let \( \tilde{C} = C - \hat{C} \), \( \tilde{\varvec{W}}^{4} = \varvec{W}^{4*} \varvec{ - \hat{W}}^{4} \) and \( \tilde{D} = D - \hat{D} \). Note that \( cv\left( t \right) \) in Eq. (33) can be expressed as
From Eqs. (33), (35), (37) and (40) we obtain
Let Lyapunov function as
Then the derivative of \( V \) along with Eqs. (25) and (36)-(39) is given by
where we have used Eqs. (30), (32), (41) and \( e_{n} d\left( t \right) \le \left| {e_{n} } \right|D \) to obtain Eq. (43).
We have the following stability theorem based on this scheme.
Theorem 1
Consider the uncertain chaotic system (25) satisfying Assumptions 1. With the application of controller (36), the link weight of FNN update law (37) and parameter update laws (38) and (39), the following statements hold:
(i) The resulting closed loop system is globally stable.(ii) The asymptotic tracking is achieved, i.e. \( \mathop {\lim }\limits_{t \to \infty } \left[ {\varvec{X}\left( t \right) - \varvec{X}_{d} \left( t \right)} \right] = 0 \).
Proof:
From Eq. (43) we established that \( V \) is non-increasing. Hence, \( e_{i} ,\;i = 1, \ldots ,n \), \( \hat{C} \), \( \hat{\varvec{W}}^{4} \), \( \hat{D} \) are bounded. By applying the LaSalle-Yoshizawa theorem to Eq. (43), it further follows that\( e_{i} \left( t \right) \to 0,\;i = 1, \ldots ,n\;{\text{as}}\;t \to \infty \), which implies that \( \mathop {\lim }\limits_{t \to \infty } \left[ {\varvec{X}\left( t \right) - \varvec{X}_{d} \left( t \right)} \right] = 0 \). This proof completed. □
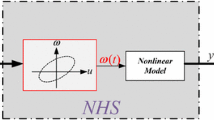
The control scheme is shown in Fig. 3.

Block of diagram of ABFNC system
6 Simulation studies
In this section, we use the proposed ABFNC to control Van der Pol chaotic system states \( \varvec{X} = \left[ {x_{1} ,x_{2} } \right] \) to follow Duffing chaotic system states \( \varvec{X}_{d} = \left[ {x_{d1} ,x_{d2} } \right] \). Duffing chaotic system is given by
According to Eq. (25), Van der Pol chaotic system with backlash is described as follows:
where \( f\left( X \right) = - 0.1(1 - x_{1} )x_{2} - x_{1}^{3} + 0.3\cos \left( t \right) \) is unknown, \( c = 3.1635 \), \( B_{1} = 0.345 \), and \( \alpha = 1 \).
In the simulation, the adaptive control laws (36)–(39) were used, taking \( a_{1} = a_{2} = 1 \), \( \gamma = \eta = 0.4 \), \( \bar{\varepsilon } = 0.05 \). The initial values are chosen to \( \hat{C}\left( 0 \right) = 0.5 \), \( \hat{D}\left( 0 \right) = 2 \), \( \varvec{X}\left( 0 \right) = \left[ {1,1} \right] \), \( \varvec{Y}\left( 0 \right) = \left[ {0.1,0.1} \right] \) and \( v\left( 0 \right) = 0 \). In this paper, we use a FNN to estimate the unknown function \( f(\varvec{X}) \). The structure of FNN is 2-6-9-1, i.e. two nodes in layer 1, six nodes in layer 2, nine nodes in layer 3, one node in layer 4. The initial FNN parameters are chosen as \( \varvec{W}^{4} = \left[ { 0. 6 ,\,\text{ - } 3 ,\, 6. 6 ,\,\text{ - } 8 ,\, 3. 8 ,\, 5. 8 ,\, 6 ,\,\text{ - } 7 ,\, 5. 8 0 2 6} \right] \), \( \varvec{m}_{1} = \left[ {\text{ - } 0. 6 ,\,\text{ - } 0. 5 8 ,\,\text{ - } 0. 5} \right] \), \( \varvec{m}_{2} = [ 1. 9 ,\, 1. 8 8 ,\, 2] \) \( \varvec{\sigma}_{1} =\varvec{\sigma}_{2} = \left[ {1,\,1,\,1} \right] \). Here, \( \varvec{W}^{4} \) represent the link weigh vector, and \( \varvec{m}_{1} \) represents the mean vector of the Gaussian membership functions of \( x_{1} \), and \( \varvec{m}_{2} \) represents the mean vector of the Gaussian membership functions of \( x_{2} \);\( \varvec{\sigma}_{1} \) represents the variance vectors of the Gaussian membership functions of \( x_{1} \), \( \varvec{\sigma}_{2} \) represents the variance vectors of the Gaussian membership functions of \( x_{2} \). The simulation results are shown in Figs. 4, 5, 6, 7 and 8. From Figs 4 and 5, we can see that \( X \to X_{d} \) completely. From Figs. 6 and 7, we can see that the tracking errors are very small, and the identifying errors are shown in Fig. 8. The effectiveness of ABFNC scheme is demonstrated by the fact that the tracking error is reduced to zero after transient process. To further illustrate the effectiveness of ABFNC scheme, we make illustration, and compare with FSMC scheme in Ref. [16]. The tracking performance is shown in Fig. 9, and we define average errors as \( AE = {{\left( {\left| {e_{1} } \right| + \left| {e_{2} } \right|} \right)} \mathord{\left/ {\vphantom {{\left( {\left| {e_{1} } \right| + \left| {e_{2} } \right|} \right)} 2}} \right. \kern-0pt} 2} \). From Fig. 9, we can see that the proposed ABFNC scheme is more effectively than FSMC scheme.

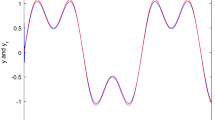
Trajectories of x1, xd1

Trajectories of x2, xd2

Tracking error

Identifying results

Identifying error

The average errors of ABFNC and FSMC
7 Conclusions
In this paper, we have developed an ABFNC scheme for a class of uncertain chaotic systems with unknown backlash nonlinearity. The developed control system does not require the model parameters with known intervals and the knowledge on the bound of ‘disturbance-like’ term is not required. In addition, the online tuning parameters include the weighting factors in the consequent part, and the means and variances of the Gaussian membership functions in the antecedent part of fuzzy implications.
Finally, this method has been applied to control Van der Pol chaotic system states to track Duffing chaotic system states. The computer simulation results show that the ABFNC can perform successful control and achieved desired performance.
References
Chen G, Dong X (1993) On feedback control of chaotic continuous-time system. IEEE Trans Circuits Syst I 40:591–601
Nijmeijer H, Berghuis H (1995) On Lyapunov control of duffing equation. IEEE Trans Circuits Syst I 42:473–477
Hua C, Guan X (2004) Adaptive control for chaotic systems. Chaos, Solitons Fractals 22:55–60
Vincent TL, Yu J (1991) Control of a chaotic system. Dyn Control 1:35–52
Chen G, Dong X (1998) From chaos to order: methodologies, perspectives, and applications. World Scientific, Singapore
Zhang HG, Li M, Yang J, Yang DD (2009) Fuzzy model-based robust networked control for a class of nonlinear systems. IEEE Trans Syst Man Cybern Part A Syst Hum 39:437–447
Tong SC, Li YM (2009) Observer-based fuzzy adaptive control for strict-feedback nonlinear systems. Fuzzy Sets Syst 160:1749–1764
Tong SC, Li CY, Li YM (2009) Fuzzy adaptive observer backstepping control for MIMO nonlinear systems. Fuzzy Sets Syst 160:2755–2775
Liu YJ, Tong SC, Li TS (2011) Observer-based adaptive fuzzy tracking control for a class of uncertain nonlinear MIMO systems. Fuzzy Sets Syst 164:25–44
Liu YJ, Chen CLP, Wen GX, Tong SC (2011) Adaptive neural output feedback tracking control for a class of uncertain discrete-time nonlinear systems. IEEE Trans Neural Netw 22:1162–1167
Liu YJ, Tong SC, Wang D, Chen Li TS, LP C (2011) Adaptive neural output feedback controller design with reduced-order observer for a class of uncertain nonlinear SISO systems. IEEE Trans Neural Netw 22:1328–1334
Zhang HG, Lun SX, Liu D (2007) Fuzzy H-infinity filter design for a class of nonlinear discrete-time systems with multiple time delay. IEEE Trans Fuzzy Syst 15:453–469
Zhang HG, Liu XR, Gong QX, Chen B (2010) New sufficient conditions for robust H∞ fuzzy hyperbolic tangent control of uncertain nonlinear systems with time-varying delay. Fuzzy Sets Syst 161:1993–2011
Lu Z, Shieh L-S, Chen G, Coleman NP (2006) Adaptive feedback linearization control of chaotic systems via recurrent high-order neural networks. Inf Sci 176:2337–2354
Chunmei He (2013) Approximation of polygonal fuzzy neural networks in sense of Choquet integral norms. Int J Mach Learn Cybernet. doi:10.1007/s13042-013-0154-8
Yau H-T (2008) Chaos synchronization of two uncertain chaotic nonlinear gyros using fuzzy sliding mode control. Mech Syst Signal Process 22:408–418
Wang Lijuan (2011) An improved multiple fuzzy NNC system based on mutual information and fuzzy integral. Int J Mach Learn Cybernet 2(1):25–36
Tsang Eric, Wang Xizhao, Yeung Daniel (2000) Improving learning accuracy of fuzzy decision trees by hybrid neural networks. IEEE Trans Fuzzy Syst 8(5):601–614
Lin CT, George Lee CS (1966) Neural fuzzy systems. Prentice-Hall, Englewood Cliffs, NJ
Wang LX (1997) A course in fuzzy systems and control. Prentice-Hall, Englewood Cliffs
Omidvar O, Elliott DL (1997) Neural systems for control. Academic, New York
Lin D, Wang X (2010) Observer-based decentralized fuzzy neural sliding mode control for interconnected unknown chaotic systems via network structure adaptation. Fuzzy Sets Syst 161:2066–2080
Chen C-S, Chen H-H (2009) Robust adaptive neural-fuzzy-network control for the synchronization of uncertain chaotic systems. Nonlinear Anal Real World Appl 10:1466–1479
Lin D, Wang X, Nian F, Zhang Y (2010) Dynamic fuzzy neural networks modeling and adaptive backstepping tracking control of uncertain chaotic systems. Neurocomputing 73:2873–2881
Su CY, Stepanenko Y, Svoboda J, Leung TP (2000) Robust adaptive control of a class of nonlinear systems with unknown backlash-like hysteresis. IEEE Trans Automat Contr 45:2427–2432
Ahmad NJ, Khorrami F (1999) Adaptive control of systems with backlash hysteresis at the input. Proc Am Control Conf 5:3018–3022
Sun X, Zhang W, Jin Y (1992) Stable adaptive control of backlash nonlinear systems with bounded disturbance. Proc IEEE Conf Dec Control 1:274–275
Tao G, Kokotovic PV (1995) Adaptive control of plants with unknown hysteresis. IEEE Trans Automat Contr 40:200–212
Zhou J, Wen C (2008) Adaptive backstepping control of uncertain systems. LNCIS 372:97–123
Lin CT, Cheng WC, Liang SF (2005) An on-line ICA-mixture-mode-based self-constructing fuzzy neural network. IEEE Trans Circuits Syst I(52):207–221
Chen YC, Teng CC (1995) A model reference control structure using a fuzzy neural network. Fuzzy Sets Syst 73:291–312
Acknowledgments
The first author is grateful to the support of the Youth Foundation of Sichuan Provincial Education Department (No. 11ZB097), the Talents Project of Sichuan University of Science and Engineering (No. 2011RC07), the Key project of Artificial Intelligence Key Laboratory of Sichuan Province (No. 2011RZJ02), the Science and Technology Key Project of Zigong (No. 2012D09), the Cultivation Project of Sichuan University of Science and Engineering (No. 2012PY19), and the Innovation Group Build Plan for the Universities in Sichuan (No. 13TD0017). The second author would like to thank the support of National Natural Science Foundation of China (No. 61363082).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lin, D., Liu, H., Song, H. et al. Fuzzy neural control of uncertain chaotic systems with backlash nonlinearity. Int. J. Mach. Learn. & Cyber. 5, 721–728 (2014). https://doi.org/10.1007/s13042-013-0218-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13042-013-0218-9