
Abstract
Neutrosophic set theory plays an important role in dealing with the impreciseness and inconsistency in data encountered in solving real life problems. This article aims to present a novel goal programming based strategy which will be helpful to solve Multi-Level Multi-Objective Linear Programming Problem (MLMOLPP) with parameters as neutrosophic numbers (NNs). Difficulty in decision making arises due to the presence of multiple decision makers (DMs) and impreciseness in information. Here each level DM has multiple linear objective functions with parameters considered as NNs which are represented in the form \(c + dI\), where c and d are considered real numbers and the symbol I denotes indeterminacy. The constraints are also linear with the parameters as NNs. Firstly the NNs are changed into intervals and the problem turns into a multi-level multi-objective linear programming problem considering interval parameters. Then interval programming technique is employed to obtain the target interval of each objective function. In order to avoid decision deadlock which may arise in hierarchical (multi-level) problem, a possible relaxation is imposed by each level DM on the decision variables under his/her control. Finally a goal programming strategy is presented to solve the MLMOLPP with interval parameters. The method presented in this paper facilitates to solve MLMOLPP with multiple conflicting objectives in an uncertain environment represented through NNs of the form \(c + dI\), where indeterminacy I plays a pivotal role. Lastly, a mathematical example is solved to show the novelty and applicability of the developed strategy.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Multi-level programming problems (MLPPs) occur in hierarchical decision making organizations where a DM is present at each level of decision making and is assigned the task of optimizing one or more objective functions. Also, every DM has independent control over a set of decision variables (Baky 2010). Since an MLPP involves multiple DMs who generally have conflicting objectives, the DMs must co-operate with each other to obtain a compromise optimal solution for the overall benefit of the organization. In particular, if an MLPP has 2 levels it is called bi-level programming problem (BLPP). In most real world situations, the values to be assigned to the parameters cannot be precisely known due to incomplete and ambiguous information. To address this problem, parameters have been interpreted as fuzzy data which is represented as fuzzy sets (Baky et al. 2014).
Goal programming (GP) (Charnes et al. 1955) is a very important mathematical tool suitable for obtaining optimal solution of multi objective programming problems involving conflicting objectives. Goal programming when applied to a programming problem with fuzzy parameters is termed as fuzzy goal programming (FGP). GP has been widely used to solve various types of optimization problems such as BLPPs, fractional BLPPs, MLPPs, fractional MLPPs, multi-objective MLPPs, and decentralized fractional BLPP (Pramanik 2012; Pramanik and Dey 2011; Pramanik et al. 2012; Baky 2010; Dey et al. 2014a).
The disadvantage of fuzzy sets is its inability to efficiently represent imprecise and inconsistent information as it considers only the truth membership function (Zadeh 1965). Intuitionistic fuzzy set (Atanassov 1986) is a modification of fuzzy sets which considered both the truth and falsity membership functions. But still it had some drawbacks in depicting human like decision making. Group decision making with fuzzy sets and intuitionistic fuzzy sets has been discussed in Banaeian et al. (2018) and Liu et al. (2018). Some recent developments on group decision making has been discussed in Morente-Molinera et al. (2018, 2019) and Pérez et al. (2018). In 1998, a new type of set called neutrosophic set was introduced by Smarandache (1998) to deal with decision making problems which involved incomplete, inconsistent and indeterminate information. Here indeterminacy is considered as an independent factor which has a major contribution in decision making. Neutrosophic set helps in human-like decision making by considering truth, falsity and indeterminacy membership functions. Wang et al. (2010) introduced single valued neutrosophic set (SVNS) to solve practical problems. Application of SVNS can be found in a vast range of decision making problems such as multi criteria decision making problems (Biswas et al. 2014a, b; Broumi and Smarandache 2014), educational problems (Mondal and Pramanik 2015), social problems (Pramanik and Chakrabarti 2013) etc.
The notion of neutrosophic number (NN) and its basic properties were established by Smarandache (2013), in which indeterminacy plays a pivotal role. Ye (2016a) investigated ranking of NNs based on possibility degree in multi-attribute group decision making (MAGDM) strategy. Another MAGDM strategy with NNs was formulated by Ye (2017) where bidirectional measure was applied. Kong et al. (2015) developed misfire fault diagnosis technique in gasoline engines using distance measure of NNs and cosine function based similarity measure. Ye (2016b) developed a method for fault diagnosis of steam turbine with the help of exponential similarity measure of NNs. Ye et al. (2017) analysed joint roughness coefficient taking the help of NN functions. NN generalized weighted power averaging operator formulated by Liu and Liu (2018) is applied to MAGDM in NN environment. Zheng et al. (2017) applied NN generalized hybrid weighted averaging operator to MAGDM problems. Mondal et al. (2018) approached MAGDM problems in NN environment through NN-Harmonic mean aggregation operators. Shi and Ye (2017) presented the cosine measures of linguistic neutrosophic numbers and used it in MAGDM with NNs. Ye (2018b) developed a multi attribute decision making strategy using the expected value in hesitant neutrosophic linguistic number and its similarity measure. Various other works related to uncertainty has also been studied (Liu et al. 2019; Zhang 2012; Zhang and Zhang 2012; Zhang et al. 2012a, b, c, 2014a, b, 2015a, b, c, 2016, 2017a, b, 2018a, b, c, d, e, f, Zhang et al. 2019a, b, c, d; Zhang and Liang 2013). Pramanik et al. (2017) addressed teacher selection problem using bidirectional projection measure in NN environment. Ye (2018a) employed a linear programming strategy in NN environment to solve optimization problems with NNs. Ye et al. (2018) have also solved non-linear programming problems in NN environment. Banerjee and Pramanik (2018) grounded the linear programming problem with single objective in NN environment with the help of goal programming. Here, the coefficients of the objectives along with the constraint coefficients have been taken to be NNs in the form of \(c + dI\), where c, d are real numbers and indeterminacy is represented by I. Pramanik and Banerjee (2018) broadened the notion of article Banerjee and Pramanik (2018) to multi-objective linear programming problem in NN environment. Also Pramanik and Dey (2018) formulated solution method to linear bi-level programming problem in NN environment.
In this paper, we have considered NNs in the form \(M = c + dI\) where c and d are real numbers and I symbolizes indeterminacy. c denotes the determinate or sure part of M and dI denotes the indeterminate or unsure part of M. I is also called the non-numerical indeterminacy (or literal indeterminacy) (Smarandache 2015) The method proposed in this paper helps to solve MLMOLPP in NN environment where the DMs present in various levels usually have conflicting objectives. The parameters for the problem are considered as NNs in the form \(c + dI\) where indeterminacy is an independent factor which plays a crucial part in decision making. Since decision making in real life problems involves indeterminate information so NNs can better represent them compared to other parameters in uncertain environment such as fuzzy numbers and intuitionistic fuzzy numbers.
A GP based strategy to solve MLMOLPP with NNs is proposed in this paper. Firstly, the NNs are transformed into interval numbers and hereby the given problem gets converted into a MLMOLPP with interval parameters. The target interval of each objective function is formed through interval programming technique and then the goal achieving functions are constructed to achieve the target goals. Each DM allows some possible relaxation on the variable controlled by him/her to avoid decision deadlock and obtain an optimal compromise solution of the MLMOLPP. Then a GP model is constructed to solve the MLMOLPP with NNs. Lastly the efficacy of the strategy discussed is demonstrated through a numerical illustration.
The remaining part of this paper is arranged in the following manner. Some preliminary notions regarding interval numbers and neutrosophic numbers are presented in Sect. 2. Section 3 deals with the formulation of the MLMOLPP with NNs. Section 4 elaborate the proposed GP strategy. In Sect. 5 the proposed strategy is applied to an illustrative numerical example to clarify its applicability. The article comes to an end with the concluding remarks and further fields of study presented in Sect. 6.
2 Preliminaries
Some elementary concepts regarding interval numbers and neutrosophic numbers have been discussed under this section head.
2.1 Interval numbers (Moore 1998)
An interval number on the real line R is denoted as \(N = [N^{L} ,\;N^{U} ] = \{ n:N^{L} \le n \le N^{U} ,\;n \in R\} ,\) where \(N^{L}\) and \(N^{U}\) represent the left and right limit of the interval number \(N\) on \(R.\)
Definition 1
Let \(m(N)\) denotes the midpoint and \(w(N)\) denotes the width of the interval number \(N\) Then \(m(N) = \frac{1}{2}(N^{L} + N^{U} )\) and \(w(N) = (N^{U} - N^{L} ).\)
Definition 2
The definition of scalar multiplication on \(N\) is as follows:
Definition 3
Absolute value of N is defined in the following way:
Definition 4
The binary operation ‘*’ between two interval numbers \(N_{1} = [N_{1}^{L} ,\;N_{1}^{U} ]\) and \(N_{2} = [N_{2}^{L} ,\;N_{2}^{U} ]\) can be defined as
In particular
2.2 Neutrosophic number (Smarandache 2013)
A neutrosophic number is denoted as \(M = c + dI\), where c and d are real (or complex) numbers and \(I \in [I^{L} ,I^{U} ]\) denotes indeterminacy. Also \(0.I = I\) and I ^ n = I for integer \(n \ge 1.\) Here \(c\) is called the determinate part of \(M\) and \(dI\) is the indeterminate part of \(M\). So \(M\) can be written as
Here we consider \(c\) and \(d\) to be real numbers.
Now the operations on NNs follow from the operations on interval numbers.
Let an NN be considered as \(M = 2 + 4I,\) where 2 represents the determinate part and \(4I\) represents the indeterminate part. Let it be assumed that \(I \in [0,1]\), so \(M\) transforms into an interval number \(M = [2,6].\)
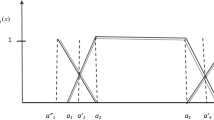
Graphical representation of NN is shown in Fig. 1.

Graphical representation of 3 Neutrosophic Numbers with \(I \in [0,1]\)
3 Formulation of MLMOLPP with NN parameters
In an MLMOLPP, each decision level has a DM associated with it and multiple objective functions have to be optimized at each level. Here we consider that the objective coefficients together with the constraint coefficients are NNs.
We consider here a hierarchical structure consisting of q (> 2) levels. The kth level decision maker DMk controls the decision variable \(w_{k} ,\,\,k = 1,2, \ldots ,q\) where \(w = (w_{1} ,w_{2} , \ldots ,w_{q} )\). A MLMOLPP with NNs where the objective function is to be minimized can be written as:
[1st level]
[2nd level]
[qth level]
Subject to
where
Here \(I_{lj} \in [I_{lj}^{L} ,I_{lj}^{U} ],\,I_{krj} \in [I_{krj}^{L} ,I_{krj}^{U} ],\,I_{kr} \in [I_{kr}^{L} ,I_{kr}^{U} ]\) and \(a_{lj} ,d_{lj} ,\alpha_{l} ,\beta_{l} ,c_{krj} ,b_{krj} ,\gamma_{kr} ,\delta_{kr} ,I_{lj}^{L} ,I_{lj}^{U} ,I_{krj}^{L} ,I_{krj}^{U} ,I_{kr}^{L} ,I_{kr}^{U}\) are real numbers. \(p_{k} \,\) is the number of objective functions for DMk\((k = 1,2, \ldots ,q)\) and \(l\) is the number of constraints.
Now from Eq. (5) we get
where \(\sum\limits_{j = 1}^{q} {(c_{krj} + I_{krj}^{L} b_{krj} )w_{j} + } (\gamma_{kr} + I_{kr}^{L} \delta_{kr} ) = C_{kr}^{L} (w)\) and \(\sum\limits_{j = 1}^{q} {(c_{krj} + I_{krj}^{U} b_{krj} )w_{j} + } (\gamma_{kr} + I_{kr}^{U} \delta_{kr} ) = C_{kr}^{U} (w)\)
Similarly, the constraints in Eq. (4) is reduced as
where \(\alpha_{l} + I_{l}^{L} \beta_{l} = B_{l}^{L}\) and \(\alpha_{l} + I_{l}^{U} \beta_{l} = B_{l}^{U} .\)
4 A goal programming strategy to solve MLMOLPP with NN parameters
The minimization type MLMOLPP with neutrosophic numbers is rewritten as:
[1st level]
[2nd level]
[qth level]
Subject to
Proposition 1
(Shaocheng 1994) Suppose\(\sum\nolimits_{k = 1}^{n} {[e_{1}^{k} ,e_{2}^{k} ]z_{k} \ge [f_{1} ,f_{2} ],}\)then\(\sum\nolimits_{k = 1}^{n} {[e_{2}^{k} ]} z_{k} \ge f_{1} ,\,\sum\nolimits_{k = 1}^{n} {[e_{1}^{k} ]z_{k} \ge f_{2} }\)are the inequalities which provide the maximum and minimum value ranges respectively.
For acquiring the best optimal solution of \(Z_{kr} (w)\,,\) (the rth objective function of the kth level DM), \(k = 1,2,\ldots ,q;\,\,r = 1,2,\ldots ,p_{k}\),we solve the following problem according to Ramadan (1996) as given below:
Subject to
Let the rth objective function of the kth level DM denoted by \(Z_{kr} (w),\) acquires its best solution at \(w_{kr}^{B} = (w_{kr1}^{B} ,w_{kr2}^{B} ,\ldots ,w_{krq}^{B} ),\,\,\,\,\,\,(k = 1,2,\ldots ,q;\,\,r = 1,2,\ldots ,p_{k} )\) and let \(Z_{kr}^{B}\) denote the best objective value of \(Z_{kr} (w).\)
The worst optimal solution of \(Z_{kr} (w)\,,\,\,\,\,\,(k = 1,2,\ldots ,q;\,\,r = 1,2,\ldots ,p_{k} )\) is obtained by solving the following problem as given by Ramadan (1996).
Subject to
Let the worst solution of \(Z_{kr} (w)\) be obtained at \(w_{kr}^{W} = (w_{kr1}^{W} ,w_{kr2}^{W} ,\ldots ,w_{krq}^{W} ),\,\,\,\,\,\,(k = 1,2,\ldots ,q;\,\,r = 1,2,\ldots ,p_{k} )\) and \(Z_{kr}^{W}\) denote the worst objective value of \(Z_{kr} (w)\).
So the optimal value of \(Z_{kr} (w)\) in interval form is \([Z_{kr}^{B} ,\,Z_{kr}^{W} ].\)
Let it be assumed that the objective function \(Z_{kr} (w)\) has its target interval \([Z_{kr}^{*B} ,\,Z_{kr}^{*W} ]\) as considered by the DM.
The objective function \(Z_{kr} (w)\) has the target level considered as follows:
Hence the goal achievement functions for \(Z_{kr} (w)\) can be written as:
where \(D_{kr}^{U} > 0,\,D_{kr}^{L} > 0\) represent the deviational variables.
Solution of the GP model presented below provides the best solution for the kth level (\(k = 1,2,\ldots ,q\)) DM.
In MLMOLPP, the objectives of various level DMs are usually conflicting in nature. So it is necessary for the DMs to cooperate with each other so as to attain a compromise optimal solution for the overall benefit of the organization (Dey et al. 2014b).
Let \(w_{k}^{B} = (w_{k1}^{B} ,w_{k2}^{B} ,\ldots ,w_{kq}^{B} )\) be the best solution of kth level DM. The decision variable which is in control of the kth level DM is \(w_{kk}^{B}\). To cooperate with other level DMs, the kth level DM allows some upper and lower preference bounds on the variable \(w_{kk}^{B}\). Let \(l_{kk}\) and \(u_{kk}\) be the respective lower and upper preference bounds suggested by the kth level DM. Therefore, we can write
Finally, we develop a GP model for MLMOLPP with neutrosophic number structured as follows:
GP model:
Subject to
Here \(\tau_{kr}^{U} ,\,\tau_{kr}^{L} \,\,(k = 1,2,\ldots ,q)\) denote the numerical weights of the corresponding deviational variables as recommended by the DMs.
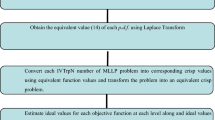
4.1 Algorithm for the proposed strategy to solve MLMOLPP with NNs
-
Step 1: The original MLMOLPP with NNs is converted into MLMOLPP with interval numbers as in Eqs. (8–10) along with the reduced constraints (7).
-
Step 2: For each objective function the individual best and worst solutions are obtained using Eqs. (11–14).
-
Step 3: The goal achievement functions are constructed using Eqs. (17–18).
-
Step 4: The best solution for each level DM is obtained using the GP model (19).
-
Step 5: The DMs assign upper and lower preference bounds as given in Eq. (20).
-
Step 6: GP model (21) is formed and its solution provides the required values of the decision variables.
The flowchart framework for solving the MLMOLPP with NNs is presented in Fig. 2.

Flowchart depicting the proposed solution method
5 Numerical illustration
A numerical problem is provided to clarify the steps of the proposed strategy to obtain the solution of MLMOLPP with NNs. Here it is considered that \(I \in [0,1].\)
1st level DM:
2nd level DM:
3rd level DM:
Subject to
Table 1 presents the transformed problem for 1st level DM and Table 2 presents the best and worst solutions for 1st level DM.
Hence the target objective functions can be taken as:
The goal functions with targets are:
The best solution of 1st level DM is obtained using GP model (19) as \(x_{1} = 6.25,\,x_{2} = 0,\,x_{3} = 0\)
The 2nd level problem is transformed into 2 linear programming problems as given in Table 3. The solutions of these 2 LPPs which give the best and worst solutions for 2nd level DM are given in Table 4.
Hence the target objective functions can be taken as:
The goal functions with targets are:
The best solution of 2nd level DM is obtained using GP model (19) as \(x_{1} = 3.0714,\,x_{2} = 0,\,x_{3} = 12.714\)
Table 5 presents the transformed problems for finding the best and worst solution of 3rd level DM. Table 6 depicts the best and worst solutions for 3rd level DM.
Hence the target objective functions can be taken as:
The goal functions with targets are:
The best solution of 3rd level DM is obtained using GP model (19) as \(x_{1} = 2.846,\,x_{2} = 4.53846,\,x_{3} = 0\)
Suppose the preference bounds offered by the 1st level DM on \(x_{1}\), the decision variable under his/her control, is taken as \(6.25 - 1.25 \le x_{1} \le 6.25 + 1.25.\) Similarly, the preference bounds set by the 2nd level DM on the decision variable \(x_{2}\) is taken as \(0 \le x_{2} \le 0 + 2\) and the 3rd level DM assigns preference bounds on the decision variable \(x_{3}\) as \(0 \le x_{3} \le 0 + 2.\)
The best solution point of each level DM and the preference bounds imposed by them are presented in Table 7.
The solution of the GP model described below is the optimal compromise solution of the original given problem.
GP model:
Subject to
Solving GP model (22), we obtain the solution point as (6.25, 0, 0). The compromise optimal range of the objective functions obtained using this solution point are shown in Table 8.
5.1 Sensitivity analysis
For different choices of the preference bounds, the solution points obtained by solving the GP model (22) are shown in Table 9.
6 Comparison with other existing methods
The proposed method solves Multi-Level Multi-Objective Linear Programming Problem with the parameters as neutrosophic numbers in the form c + dI, where c and d are real numbers and I denotes indeterminacy. But there exists no other method in the literature for solving Multi-Level Multi-Objective Linear Programming Problem with neutrosophic numbers in the form c + dI. This is the first approach in neutrosophic number environment.
Some research articles dealing with Multi-Level Multi-Objective Linear Programming Problem (MLMOLPP) are mentioned here. Liu and Yang (2018) used interactive programming approach to solve MLMOLPP. Pramanik et al. (2015) deals with the solution of multi- level linear plus linear fractional programming with multiple objective functions using Fuzzy Goal Programming (FGP) approach. MLMOLPP has been solved using FGP by Baky (2010). Lachhwani (2014) solved MLMOLPP using FGP approach in a simpler way than Baky (2010). In all these articles the parameters are crisp numbers. So the parameter environments of these papers are different than our paper.
Multi-Level Multi-Objective Programming Problem which involves fuzzy parameters in the objectives and right hand side of constraints has been solved by Abou-El-Enien and El-Feky (2018). Here the compromise solution of the problem has been obtained using TOPSIS approach. Stochastic fuzzy multi-level multi-objective fractional programming problem has been solved by Osman et al. (2017) using FGP approach. Here the chance-constrained approach with dominance possibility criteria and level cuts are used to transform the fuzzy problem into an equivalent crisp problem. Emam et al. (2016) discussed a solution method to multi-level multi-objective quadratic programming problem with the constraint parameters as trapezoidal fuzzy numbers. The method proposed in this article uses linear ranking to convert the fuzzy numbers into crisp numbers and then uses interactive approach to obtain the satisfactory solution. A solution procedure of multi-level multi-objective fractional programming problem with fuzzy demands has been discussed by Osman et al. (2018) using FGP approach. In all these research articles, the parameters are considered as fuzzy numbers.
So it can be observed that till now no paper in the literature deals with MLMOLPP with neutrosophic numbers in the form c + dI. Since the parameter environment of our paper does not match with that of other research articles, for this reason direct comparison with relative methods does not arise.
7 Conclusion
The paper presents a GP strategy to solve MLMOLPP with neutrosophic numbers. The NNs are firstly converted into interval numbers and the problem thus gets changed into an MLMOLPP with interval parameters. Interval programming technique is employed to obtain the target interval of each objective function. Goal achievement functions are constructed to attain the target goals. Since in an MLMOLPP, a situation of decision deadlock may arise owing to conflicting objectives, each level DM provides preference bounds on the decision variables controlled by him/her. GP strategy is then employed to obtain the compromise optimal solution of the MLMOLPP with NNs. A numerical example is solved to clarify the applicability and efficiency of this strategy. The method discussed here can be applied in decision making in large hierarchical organizations where multiple DMs having conflicting objectives are involved. Real decision making process can be better represented through neutrosophic numbers as it considers all aspects of decision making i.e., truth, falsity and indeterminacy. Here indeterminacy is considered as an independent factor which has a key role in decision making. The novelty of the method lies in its simplicity and efficient handling of indeterminate data.
No comparison is done as the developed strategy is the first attempt to solve MLMOLPP in NN environment. The goal programming strategy discussed here can be useful to solve real problems in a vast range of fields which include agriculture, transportation, bio-fuel production etc. in NN environment.
References
Abou-El-Enien THM, El-Feky SF (2018) Compromise solutions for fuzzy multi-level multiple objective decision making problems. Am J Comput Appl Math 8(1):1–14
Atanassov KT (1986) Intuitionistic fuzzy sets. Fuzzy Sets Syst 20(1):87–96
Baky IA (2010) Solving multi-level multi-objective linear programming problems through fuzzy goal programming approach. Appl Math Model 34(9):2377–2387
Baky IA, Eid MH, Elsayed MA (2014) Bi-level multi-objective programming problem with fuzzy demands: a fuzzy goal programming algorithm. J Oper Res Soc India (OPSEARCH) 51(2):280–296
Banaeian N, Mobli H, Fahimnia B, Nielsen IE, Omid M (2018) Green supplier selection using fuzzy group decision making methods: a case study from the agri-food industry. Comput Oper Res 89(C):337–347
Banerjee D, Pramanik S (2018) Single-objective linear goal programming problem with neutrosophic numbers. Int J Eng Sci Res Technol 7:454–469
Biswas P, Pramanik S, Giri BC (2014a) Entropy based grey relational analysis method for multi-attribute decision making under single valued neutrosophic assessments. Neutrosophic Sets Syst 2:105–113
Biswas P, Pramanik S, Giri BC (2014b) A new methodology for neutrosophic multi-attribute decision-making with unknown weight information. Neutrosophic Sets Syst 3:42–50
Broumi S, Smarandache F (2014) Single valued neutrosophic trapezoid linguistic aggregation operators based multi-attribute decision making. Bull Pure Appl Sci Math Stat 33E(2):135–155
Charnes A, Cooper WW, Ferguson A (1955) Optimal estimation of executive compensation by linear programming. Manag Sci 1(2):138–151
Dey PP, Pramanik S, Giri BC (2014a) Multilevel fractional programming problem based on fuzzy goal programming. Int J Innov Res Tech Sci 2:17–26
Dey PP, Pramanik S, Giri BC (2014b) TOPSIS approach to linear fractional bi-level MODM problem based on fuzzy goal programming. J Ind Eng Int 10(4):173–184
Emam OE, Abdo AM, Bekhit NM (2016) A multi-level multi-objective quadratic programming problem with fuzzy parameters in constraints. Int J Eng Res Dev 12(4):50–57
Kong L, Wu Y, Ye J (2015) Misfire fault diagnosis method of gasoline engines using the cosine similarity measure of neutrosophic numbers. Neutrosophic Sets Syst 8:42–45
Lachhwani K (2014) On solving multi-level multi objective linear programming problems through fuzzy goal programming approach. Opsearch 51(4):624–637
Liu P, Liu X (2018) The neutrosophic number generalized weighted power averaging operator and its application in multiple attribute group decision making. Int J Mach Learn Cybern 9(2):347–358
Liu QM, Yang YM (2018) Interactive programming approach for solving multi-level multi-objective linear programming problem. J Intell Fuzzy Syst 35(1):55–61
Liu P, Liu J, Merigó JM (2018) Partitioned Heronian means based on linguistic intuitionistic fuzzy numbers for dealing with multi-attribute group decision making. Appl Soft Comput 62:395–422
Liu S, Zhang DG, Liu XH, Zhang T, Gao JX, Cui YY (2019) Dynamic analysis for the average shortest path length of mobile ad hoc networks under random failure scenarios. IEEE Access 7:21343–21358
Mondal K, Pramanik S (2015) Neutrosophic decision making model of school choice. Neutrosophic Sets Syst 7:62–68
Mondal K, Pramanik S, Giri BC, Smarandache F (2018) NN-Harmonic mean aggregation operators-based MCGDM strategy in a neutrosophic number environment. Axioms. https://doi.org/10.3390/axioms7010012
Moore RE (1998) Interval analysis. Prentice-Hall, New Jersey
Morente-Molinera JA, Kou G, Peng Y, Torres-Albero C, Herrera-Viedma E (2018) Analysing discussions in social networks using group decision making methods and sentiment analysis. Inf Sci 447:157–168
Morente-Molinera JA, Kou G, Samuylov K, Ureña R, Herrera-Viedma E (2019) Carrying out consensual Group Decision Making processes under social networks using sentiment analysis over comparative expressions. Knowl Based Syst 165:335–345
Osman MS, Emam OE, El Sayed MA (2017) Stochastic fuzzy multi-level multi-objective fractional programming problem: a FGP approach. Opsearch 54(4):816–840
Osman MS, Emam OE, El Sayed MA (2018) Solving multi-level multi-objective fractional programming problems with fuzzy demands via FGP approach. Int J Appl Comput Math 4:41
Pérez IJ, Cabrerizo FJ, Alonso S, Dong YC, Chiclana F, Herrera-Viedma E (2018) On dynamic consensus processes in group decision making problems. Inf Sci 459:20–35
Pramanik S (2012) Bilevel programming problem with fuzzy parameters: a fuzzy goal programming approach. J Appl Quant Methods 7(1):9–24
Pramanik S, Banerjee D (2018) Neutrosophic number goal programming for multi-objective linear programming problem in neutrosophic number environment. MOJ Res Rev 1(3):135–141
Pramanik S, Chakrabarti SN (2013) A study on problems of construction workers in West Bengal based on neutrosophic cognitive maps. Int J Innov Res Sci Eng Technol 2(11):6387–6394
Pramanik S, Dey PP (2011) Bi-level linear fractional programming problem based on fuzzy goal programming approach. Int J Comput Appl 25(11):34–40
Pramanik S, Dey PP (2018) Bi-level linear programming problem with neutrosophic numbers. Neutrosophic Sets Syst 21:110–121
Pramanik S, Dey PP, Roy TK (2012) Fuzzy goal programming approach to linear fractional bilevel decentralized programming problem based on Taylor series approximation. J Fuzzy Math 20:231–238
Pramanik S, Banerjee D, Giri BC (2015) Multi-level multi-objective linear plus linear fractional programming problem based on FGP approach. Int J Innov Sci Eng Technol 2(5):171–177
Pramanik S, Roy R, Roy TK (2017) Teacher selection strategy based on bidirectional projection measure in neutrosophic number environment. In: Smarandache F, Abdel-Basset M, El-Henawy I (eds) Neutrosophic operational research, vol 2. Pons Publishing House/Pons asbl, Bruxelles, pp 29–53
Ramadan K (1996) Linear programming with interval coefficients. Doctoral dissertation, Carleton University
Shaocheng T (1994) Interval number and fuzzy number linear programming. Fuzzy Sets Syst 66(3):301–306
Shi L, Ye J (2017) Cosine measures of linguistic neutrosophic numbers and their application in multiple attribute group decision-making. Information 8(4):117. https://doi.org/10.3390/info8040117
Smarandache F (1998) A unifying field in logics: neutrosophic logic. Neutrosophy, Neutrosophic set, neutrosophic probability and statistics. American Research Press, Rehoboth
Smarandache F (2013) Introduction of neutrosophic statistics. Sitech and Education Publisher, Craiova
Smarandache F (2015) (t, i, f)-Neutrosophic structures & I-neutrosophic structures (revisited). Neutrosophic Sets Syst 8:3–9
Wang H, Smarandache F, Zhang YQ, Sunderraman R (2010) Single valued neutrosophic sets. Multispace and Multistruct 4:410–413
Ye J (2016a) Multiple attribute group decision making method under neutrosophic number environment. J Intell Syst 25(3):377–386
Ye J (2016b) Fault diagnoses of steam turbine using the exponential similarity measure of neutrosophic numbers. J Intell Fuzzy Syst 30(4):1927–1934
Ye J (2017) Bidirectional projection method for multiple attribute group decision making with neutrosophic numbers. Neural Comput Appl 28(5):1021–1029
Ye J (2018a) Neutrosophic number linear programming method and its application under neutrosophic number environments. Soft Comput 22(14):4639–4646
Ye J (2018b) Multiple attribute decision-making methods based on the expected value and the similarity measure of hesitant neutrosophic linguistic numbers. Cogn Comput 10(3):454–463
Ye J, Chen J, Yong R, Du S (2017) Expression and analysis of joint roughness coefficient using neutrosophic number functions. Information 8(2):69. https://doi.org/10.3390/info8020069
Ye J, Cui W, Lu Z (2018) Neutrosophic number nonlinear programming problems and their general solution methods under neutrosophic number environments. Axioms 7(1):13. https://doi.org/10.3390/axioms7010013
Zadeh LA (1965) Fuzzy sets. Inf Control 8(3):338–353
Zhang DG (2012) A new approach and system for attentive mobile learning based on seamless migration. Appl Intell 36(1):75–89
Zhang DG, Liang YP (2013) A kind of novel method of service-aware computing for uncertain mobile applications. Math Comput Model 57(3–4):344–356
Zhang DG, Zhang XD (2012) Design and implementation of embedded un-interruptible power supply system (EUPSS) for web-based mobile application. Enterp Inf Syst 6(4):473–489
Zhang DG, Kang X, Wang J (2012a) A novel image de-noising method based on spherical coordinates system. EURASIP J Adv Signal Process 2012:110
Zhang D, Zhao CP, Liang YP, Liu ZJ (2012b) A new medium access control protocol based on perceived data reliability and spatial correlation in wireless sensor network. Comput Electr Eng 38(3):694–702
Zhang DG, Zhu YN, Zhao CP, Dai WB (2012c) A new constructing approach for a weighted topology of wireless sensor networks based on local-world theory for the Internet of Things (IOT). Comput Math Appl 64(5):1044–1055
Zhang DG, Li G, Zheng K, Ming X, Pan ZH (2014a) An energy-balanced routing method based on forward-aware factor for wireless sensor networks. IEEE Trans Ind Inf 10(1):766–773
Zhang DG, Wang X, Song X, Zhao D (2014b) A novel approach to mapped correlation of ID for RFID anti-collision. IEEE Trans Serv Comput 7:741–748
Zhang DG, Wang X, Song XD (2015a) New medical image fusion approach with coding based on SCD in wireless sensor network. J Electr Eng Technol 10(6):2384–2392
Zhang DG, Wang X, Song XD, Zhang T, Zhu YN (2015b) A new clustering routing method based on PECE for WSN. EURASIP J Wirel Commun 2015:162
Zhang DG, Zheng K, Zhang T, Wang X (2015c) A novel multicast routing method with minimum transmission for WSN of cloud computing service. Soft Comput 19(7):1817–1827
Zhang DG, Zheng K, Zhao DX, Song XD, Wang X (2016) Novel quick start (QS) method for optimization of TCP. Wirel Netw 22(1):211–222
Zhang DG, Liu S, Zhang T, Liang Z (2017a) Novel unequal clustering routing protocol considering energy balancing based on network partition and distance for mobile education. J Netw Comput Appl 88:1–9
Zhang DG, Niu HL, Liu S (2017b) Novel PEECR-based clustering routing approach. Soft Comput 21(24):7313–7323
Zhang DG, Chen C, Cui YY, Zhang T (2018a) New method of energy efficient subcarrier allocation based on evolutionary game theory. Mobile Netw Appl. https://doi.org/10.1007/s11036-018-1123-y
Zhang DG, Liu S, Liu XH, Zhang T, Cui YY (2018b) Novel dynamic source routing protocol (DSR) based on genetic algorithm-bacterial foraging optimization (GA-BFO). Int J Commun Syst 31(18):1–20
Zhang DG, Tang YM, Cui YY, Gao JX, Liu XH, Zhang T (2018c) Novel reliable routing method for engineering of internet of vehicles based on graph theory. Eng Comput 36(1):226–247
Zhang DG, Zhang T, Dong Y, Liu XH, Cui YY, Zhao DX (2018d) Novel optimized link state routing protocol based on quantum genetic strategy for mobile learning. J Netw Comput Appl 122:37–49
Zhang DG, Zhang T, Zhang J, Dong Y, Zhang XD (2018e) A kind of effective data aggregating method based on compressive sensing for wireless sensor network. J Wirel Comput Netw 2018:159
Zhang DG, Zhou S, Tang YM (2018f) A low duty cycle efficient MAC protocol based on self-adaption and predictive strategy. Mobile Netw Appl 23(4):828–839
Zhang DG, Gao JX, Liu XH, Zhang T, Zhao DX (2019a) Novel approach of distributed and adaptive trust metrics for MANET. Wirel Netw 25(6):3587–3603
Zhang DG, Ge H, Zhang T, Cui YY, Liu X, Mao G (2019b) New multi-hop clustering algorithm for vehicular ad hoc networks. IEEE Trans Intell Transp Syst 20:1517–1530
Zhang DG, Zhang T, Liu X (2019c) Novel self-adaptive routing service algorithm for application in VANET. Appl Intell 49(5):1866–1879
Zhang T, Zhang DG, Qiu J, Zhang X, Zhao P, Gong C (2019d) A kind of novel method of power allocation with limited cross-tier interference for CRN. IEEE Access 7:82571–82583
Zheng E, Teng F, Liu P (2017) Multiple attribute group decision-making method based on neutrosophic number generalized hybrid weighted averaging operator. Neural Comput Appl 28(8):2063–2074
Acknowledgements
The first author expresses her heartfelt gratitude towards Department of Science and Technology, Govt. of India for providing financial assistantship through Inspire fellowship.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors state that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Maiti, I., Mandal, T. & Pramanik, S. Neutrosophic goal programming strategy for multi-level multi-objective linear programming problem. J Ambient Intell Human Comput 11, 3175–3186 (2020). https://doi.org/10.1007/s12652-019-01482-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12652-019-01482-0