
Abstract
In this article, we introduce analytical-approximate solutions of time-fractional generalized Pochhammer-Chree equations for wave propagation of elastic rod by means of the q-homotopy analysis of the transform method (q-HATM). In the Caputo sense, basic concepts for fractional derivatives are defined. Several examples are given and the results are illustrated via some surface plots to present the physical representation. The results show that the current methodology is productive, powerful, efficient, easy to use, and ready to incorporate a wide variety of partial fractional differential equations.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The fractional analysis is defined as an enhancement of the principles of classical order integral and derivative part of a conventional investigation to fractional order. Fractional analysis has been widely applied over the last century in the fields of engineering, physics, and biology in association with mathematics. The key explanation for this is that many phenomena such as propagation and wave motion, chaos, viscoelasticity and damping, filtering and irreversibility, controller architecture can be modeled and explained more specifically using fractional analysis. As a consequence, nonlinear partial fractional differential equations (NPFDEs) have been inspired by many scientists and researchers in recent years and have been thoroughly researched and applied in various branches of science and engineering for many real-life problems. As a result, many science and engineering applications can be found and applied via fractional NPFDEs [1–8]. Consequently, in these listed areas, the discovery of numerical and analytical-approximate solutions of NPFDEs has a hugely significant and special role. The most significant distinction between classical and fractional analysis is that there is no single derivative concept as in classical analysis. The occurrence of diverse derivative description with fractional calculus (FC) opens the door for considering the most suitable one for the model’s form and thus obtaining the best solution to the problem. We have diverse and pioneering notions for FC and while there are transitions between them, they vary in terms of their meanings and their physical representations of their definitions. In this article, we preferred to apply Caputo derivative definition, which is the most popular one, for its practicality and compatibility with classical initial conditions.
Some of the classical approximate and analytical techniques for fractional differential equations (FDEs) have been developed to date are optimal homotopy asymptotic method that was implemented to Klein-Gordon, diffusion, wave-diffusion and telegraph equations [9, 10], differential transform method for system of equations and finance equation [11, 12], homotopy perturbation method for system of partial equations and Riccati equation [13, 14], finite difference method for Burger–Fisher equation [15], homotopy analysis method for Burgers–Korteweg–de Vries equation and Whitham–Broer–Kaup equation [16, 17], reproducing kernel Hilbert space method for linear and nonlinear partial and Robin equations [18, 19], residual power series method for Burgers–Kadomtsev–Petviashvili and Burgers’ type equations [20, 21], q-homotopy analysis method for Lax’s Korteweg–de Vries and Sawada–Kotera equations and Noyes–Field model [22, 23] and so on.
In this article, our goal is to study the Pochhammer–Chree (PC) equation using the q-homotopy analysis transform method (q-HATM) [26–32]. The PC model is given as
where m is a positive number and \(\beta _1,\,\beta _2,\) and \(\beta _3\) are constants. This is a model of an elastic rod’s longitudinal vibrations. It is a simplified version of the well-known equation called the regularized Boussinesq equations, an important model that basically explains the propagation of long waves in regimes where water is shallow and waves, like the other Boussinesq equations, have small amplitudes. The (q-HATM is the result of combining the (q-HAM and the Laplace transform method. This method employs two convergence control parameters, n and \(\hbar ,\) to help modify and regulate the solution’s convergence region. Many scholars have recently used the proposed approach to find solutions for differential equations illustrating various models and phenomena associated with fractional calculus and have presented numerical simulations to verify the accuracy of the method.
The paper structure is proposed as follows. The basic theory of fractional calculus is presented in Section 2. The projected algorithm for the considered equation is devoted to Section 3. Solutions for the considered equation are presented in Section 4. Finally, the paper is ended with a conclusion section.
2 Preliminaries
We recall some essential notions of FC and Laplace transform.
Definition 1
The Riemann–Liouville fractional integral of \(f\left( t\right) \in {{C}_{\delta }} ~\left( \delta \ge -1\right)\) is defined as
Definition 2
In the Caputo sense, the fractional derivative of \(f\in C_{-1}^{\eta }\) is presented as
Definition 3
The Laplace transform (LT) of \({\mathcal {D}}_{t}^{\mu }f(t)\) is given by
where F(s) is symbolize the LT of f(t).
3 Projected algorithm for considered equation
Here, we illustrate procedure of hired scheme [33–37] for P-C model defined in Eq. (1) for the case when \(n=1\) given as
subjected to
where \({\mathcal {D}}_{t}^{\mu }u\left( x,t\right)\) represents the Caputo fractional derivative of \(u\left( x,t\right) .\) Here, \(u\left( x,t\right)\) is a bounded function. Now, we obtain the following equation by applying LT on Eq. (5)
The nonlinear is contracted as follows:
where \(q\in \left[ 0,\frac{1}{n}\right] .\) Then, the homotopy is construct as
where \({\mathscr {L}}\) is signifying LT. For \(q=0\) and \(q=\frac{1}{n}\), the following conditions satisfies;
By using Taylor theorem, we consider
where
For the proper chaise of \(u_{0}(x,t)\), n and \(\hbar\), the series Eq. (12) converges at \(q=1/n\). Then
After differentiating Eq. (13) m-times with q and multiplying by 1/m! and substituting \(q=0\), one can get
with
Eq. (12) reduces after employing inverse LT to
where
and
From Eq. (16), in addition to Eqs. 17 and 18, we have
Here,
Finally, the q-HATM solution is
Here, we illustrate the convergence analysis of considered scheme for projected model.
Theorem 3.1
(Uniqueness theorem) By the help of considered scheme, the achieved solution for the PC Eq. (5) is unique wherever \(0<\lambda <1\), where \(\lambda =(k_{m}+\hbar )+\hbar \big \{\delta _{1}^{4}+\delta _{2}^{2}\big (\beta _{1}+\beta _2(P+Q)+\beta _{3}(P^{2}+Q^{2}+PQ)\big )\big \} {\mathcal {T}}\).
Proof
The solution for consider equation defined in Eq. (5) is presented as
where \(u_m\) is defined in Eq. (19). If possible, let u and w be the two distinct solutions for Eq. (5) such that \(\left| u\right| \le P\) and \(\left| {w}\right| \le {Q}\), then
Now, we get the following result by applying convolution theorem for LT
where \(\delta _{1}^{4}=\frac{\partial ^{4}}{\partial {t^2}\partial {x^2}}\) and \(\delta _{2}^{2}=\frac{\partial ^{2}}{\partial {x^2}}.\) By the help of integral mean value, the above equation reduces to
Thus, \((1-\lambda )\left| {u}-w\right| \le 0.\) Since \(0<\lambda <1\), we conclude that \(\left| u-w\right| =0 \overrightarrow {u}=w\). This completes the required result. \(\square\)
Theorem 3.2
(Convergence theorem) Suppose \(\wp\) is a Banach space and \(F:\wp \rightarrow \wp\) is mapping. Suppose for \(\forall ~u,~v\in \wp\)
then there is a fixed point for F [24, 25]. Further, the sequence converges to fixed point of F with an arbitrary choice of \(u_{0},v_{0}\in \wp\) and
Proof
Let \((\wp [J],\left\| \cdot \right\| )\) be a Banach space of J with \(\left\| g(t)\right\| =\underset{t\in {J}}{\max }\left| g(t)\right|\). First, we prove \(\left\{ {u}_{n}\right\}\) is Cauchy sequence in \((\wp [J],\left\| \cdot \right\| )\). Now, consider
With the help of convolution theorem for LT, we obtain
By using integral mean value theorem [24, 25], the Eq. (27) simplifies to
For \(m=n+1\);
On using triangular inequality, we have
Since \(0<\lambda <1\), we have \(1-{{\lambda }^{m-n-1}}<1\), then
But \(\left\| {u}_{1}-u_{0}\right\| <\infty\) consequently as \(m\rightarrow \infty\) than \(\left\| {u}_{m}-u_{n}\right\| \rightarrow {0}\), and which gives \(\left\{ {u}_{n}\right\}\) is Cauchy sequence in \(\wp \left[ J\right]\). Hence, \(\left\{ {u}_{n}\right\}\) is convergent sequence which completes the required result.\(\square\)
4 Solutions for the considered equation
Here, we consider three cases of Eq. (5) to confirm the applicability and efficiency of the hired algorithm.
Example 1
Consider Eq. (5) at \(\beta _{1}\ne {0},\,\beta _{2}\ne {0}\) and \(\beta _{3}=0.\) Then, we have
subjected to
By the help of projected algorithm, we have
where
With the help of Eq. (35) other terms can be achieve. The analytical result for the corresponding equation is

Nature of (a) q-HATM, (b) exact results, and (c) absolute error for Example 1 at \(n=1,\,\hbar =-1,\beta _{1}=-1.5,\,\beta _{2}=1,\) and \(\mu =2\)

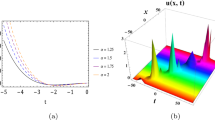
Nature of achieved results for Example 1 for distinct \(\mu\) at \(t=0.1,\,\,n=1,\hbar =-1,\,\beta _{1}=-1.5,\) and \(\beta _{2}=1\)

\(\hbar\)-curves for Example 1 for different \(\mu\) at \(n=1,\,\beta _{1}=1.5,\,\beta _{2}=1,\,t=0.05\) and \(x=2\)
Example 2
Consider Eq. (5) at \({{\beta }_{1}\ne 0,}\) \({{\beta }_{2}=0}\) and \(\beta _{3}\ne {0}\) and then we have
subjected to the initial conditions
By the help of projected algorithm, we have
where
On simplifying the forgoing equations, we get
Further terms can be obtained with the aid of Eq. (41). The corresponding analytical result is

Nature of (a) q-HATM, (b) exact results, (c) absolute error for the Example 2 at \(n=1\), \(\hbar =-1\), \(\beta _{1}=-1.5\), \(\beta _{3}=-0.5\), \(\sigma =-1, \phi =1\) and \({{\mu }}=2\)

Nature of achieved results for Example 2 for distinct \(\mu\) at \(n=1,\) \(\hbar =-1,\) \(\beta _{1}=1.5,\) \(\beta _{3}=-0.5\) and \(\sigma =-1,\) \(\phi =1\) and \(x=1\)

\(\hbar\)-curves for Example 2 for different \(\mu\) at \(n=1,\) \(\beta _{1}=1.5,\) \(\beta _{3}=-0.5,\) \(\sigma =-1,\) \(\phi =1,\) \(t=0.05,\) \(x=8\)
Example 3
Consider Eq.(5) at \({{\beta }_{1}}\ne 0,~{{\beta }_{2}}\ne 0\) and \({{ \beta }_{3}}\ne 0\) and then
subjected to
and
By the help of projected algorithm, we have
where
On solving the above equations, we can obtain
Further terms can be obtained with the aid of Eq. (49). The corresponding exact results is
where \(c=\frac{1}{3}\sqrt{\frac{9\beta _1\beta _3-2\beta _2^2}{\beta _3}}.\)

Surfaces of (a) q-HATM result, (b) exact result, (c) absolute error for Example 3 with \(\hbar =-1,\,n=1,\,\beta _{1}=1.5,\,\beta _{1}=1,\,\beta _{3}=-0.1,\) and \(\mu =2\)

Nature of achieved results for Example 3 for distinct \(\mu\) at \(n=1,\,\hbar =-1,\,\beta _{1}=1.5,\,\beta _{2}=1,\,\beta _{3}=-0.1\) and \(t=1\)

\(\hbar\)-curves for Example 3 for distinct \(\mu\) at \(n=1,\,\beta _{1}=1.5,\,\beta _{2}=1,\,\beta _{3}=-0.1,\,\sigma =-1,\,\phi =1,\,t=0.01,\) and \(x=5\)
5 Results and Discussion
In the present study, we find the solutions for the generalized Pochhammer-Chree equations with the assist of an efficient solution procedure (i.e., q-HATM) and captured corresponding consequences. The considered model illustrates the stimulating consequences of the wave propagation of elastic rod. Three cases are hired to illustrate the efficiency and applicability of the method with nonlinear differential equations without hiring any perturbation and dissertation. The numerical comparison study has been carried between exact and achieved results for Example 1 and cited in Table 1, and it confirms as space increases the accuracy of the attained series solution is also increase. Further, the nature of archived for three cases is captured for diverse fractional-order and with respect to parameters are associated with the method. For the fractional Pochhammer-Chree equation is studied in Example 1, the surfaces of the exact solution with achieved results in terms of absolute error are presented in Fig. 1 and the effect of fractional order in the obtained results, in this case, is presented in Figs. 2, 3 with the change in x. We can observe from Fig. 2 that, between the range [-1.5,2.5 ], nature is stimulating for fractional order \((\mu =0.50\)). For Examples 2, 3, the comparison of obtained consequences with analytical results are, respectively, cited in Figs. 4, 5, 6, 7, and also the effect of fractional order is demonstrated in Figs. 5, 8. Specifically, we can observe from Fig. 7, the q-HATM results are accurate and confirmed with a small absolute region.
The considered algorithms offer parameters, which can assist for the converges region of the obtained solution with the assist of the axillary parameter or homotopy parameter \((\hbar )\) and which is presented in Fig. 3 for Example 1 with distinct order and it can assist us to adjust and control the convergence of the obtained results by modulating its value with n. Precisely, the flat line segment authorizes the convergence region with exact results. For Examples 2, 3, the \((\hbar )\)-curves are, respectively, presented in Figs. 6, 9 with a small time for the particular values of the other parameters. Moreover, with seized records, we can realize that the considered equations exceptionally be contingent on the order and give a huge degree of freedom for generalizing with fractional order. Also, this investigation may support to illustrate miscellaneous types and assist to seizure more consequences.
6 Conclusions
In this research, the time-fractional generalized Pochhammer-Chree partial differential equation occurring in longitudinal vibrations of an elastic rod has been implemented with a reliable tool, namely the q-homotopy analysis transform method. Using the Caputo derivative definition, with three separate examples, effective approximate results of the equation have been obtained. Then, the surface plots are presented to illustrate approximate solutions. It is therefore shown that the approach is very powerful and could be used in various forms of FPDEs occurring in various fields of mathematical physics.
References
C Ravichandran, K Logeswari and F Jarad Chaos, Solitons & Fractals, 125 194 (2019)
S J Achar, C Baishya, P Veeresha and L Akinyemi, Fractal and Fractional, 6 1 (2022)
M A Alqudah, et al. Adv. Differ. Equ., 2019 1 (2019)
A Kumar, et al. Adv. Differ. Equ., 2020 1 (2020)
N Valliammal and C Ravichandran Nonlinear Studies, 25 159 (2018)
C Baishya and P Veeresha, Proceeding of the Royal Society A, 477 (2253) (2021)
S K Panda, et al. Chaos, Solitons & Fractals, 142 110390 (2021)
K Jothimani, N Valliammal and C Ravichandran, J. Appl. Nonlinear Dyn., 7 371 (2018)
S Sarwar and S Iqbal Nonlinear Sci. Lett. A 8 365 (2017)
S Sarwar, and M M Rashidi Waves in random and complex media 26 365 (2016)
M Eslami and H Rezazadeh Caspian Journal of Mathematical Sciences (CJMS) 9 340 (2020)
M Yavuz, N Ozdemir and Y Y Okur International Conference on Fractional Differentiation and its Applications, Novi Sad, Serbia (pp. 778-785) (2016)
H Aminikhah, H M S Sheikhani and H Rezazadeh J. Math. Model 2 22 (2014)
H Aminikhah, A H R Sheikhani and H Rezazadeh Ain Shams Engineering Journal 9 581 (2018)
A Yokus and M Yavuz Discrete & Continuous Dynamical Systems-S (2018). https://doi.org/10.3934/dcdss.2020258
A Kurt, O Tasbozan and Y Cenesiz Bull. Math. Sci. Appl. 17 17 (2016)
A Kur and O Tasbozan International Journal of Pure and Applied Mathematics 98 503 (2015)
O A Arqub Computers & Mathematics with Applications, 73 1243 (2017)
O A Arqub International Journal of Numerical Methods for Heat & Fluid Flow (2018)
M Senol Communications in Theoretical Physics 72 055003 (2020)
M Senol, O Tasbozan and A Kurt Chinese Journal of Physics 58 75 (2019)
L Akinyemi Computational and Applied Mathematics 38 191 (2019)
L Akinyemi Computational and Applied Mathematics, 39 1-34 (2020)
I K Argyros Springer Science & Business Media (2008)
A A Magrenan, Applied Mathematics and Computation 248 215 (2014)
P Veeresha, D G Prakasha and D Baleanu Mathematical Methods in the Applied Sciences 43 1970 (2020)
S J Liao J. Basic Sci. Eng. 5 111 (1997)
K M Safare, et al. Numerical Methods for Partial Differential Equations 37 1282 (2021)
S W Yao, E Ilhan, P Veeresha and H M Baskonus Fractals, (2021). https://doi.org/10.1142/S0218348X21400235
D Kumar, R P Agarwal and J Singh J. Comput. Appl. Math. 399 405 (2018)
P Veeresha, D G Prakasha and D Baleanu Journal of Computational and Nonlinear Dynamics, 16 (2020). https://doi.org/10.1115/1.4048577
H M Srivastava, D Kumar, and J Singh Appl. Math. Model 45 192 (2017)
J Singh, D Kumar and R Swroop Alexandria Eng. J. 55 1753 (2016)
P Veeresha, D G Prakasha, et al. Advances in Difference Equations 173 (2020)
D G Prakasha, N S Malagi, and P Veeresha Math. Methods Appl. Sci. 43 9654 (2020)
L Akinyemi et al. Results Phys. 31 (2021)
N I Okposo, P Veeresha and E N Okposo Chinese J. Phys. (2021), https://doi.org/10.1016/j.cjph.2021.10.014.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Akinyemi, L., Veeresha, P., Şenol, M. et al. An efficient technique for generalized conformable Pochhammer–Chree models of longitudinal wave propagation of elastic rod. Indian J Phys 96, 4209–4218 (2022). https://doi.org/10.1007/s12648-022-02324-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12648-022-02324-0