
Abstract
In this paper, a new numerical method for solving multi-delay and piecewise constant delay systems is presented. The method is based upon hybrid functions approximation. The properties of hybrid functions consisting of block-pulse functions and Bernoulli polynomials are presented. The operational matrices of integration, product and delay are given. These matrices are then utilized to reduce the solution of multi-delay systems and the piecewise constant delay systems to the solution of algebraic equations. Illustrative examples are included to demonstrate the validity and applicability of the technique.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Delays occur frequently in biological, chemical, electronic and transportation systems. Time-delay systems are therefore a very important class of systems whose control and optimization have been of interest to many investigators [1–4]. It is well known that it is difficult to analytically solve a delay system. Several numerical methods have been used to obtain an approximate solution for delay differential equations [5].
The available sets of orthogonal functions can be divided into three classes. The first class includes sets of piecewise constant basis functions (e.g., block-pulse, Haar, Walsh, etc.). The second class consists of sets of orthogonal polynomials (e.g., Chebyshev, Laguerre, Legendre, etc.). The third class is the set of sine–cosine functions in the Fourier series. Orthogonal functions have been used when dealing with various problems of the dynamical systems. The main advantage of using orthogonal functions is that they reduce the dynamical system problems to those of solving a system of algebraic equations. The approach is based on converting the underlying differential equation into an integral equation through integration, approximating various signals involved in the equation by truncated orthogonal functions, and using the operational matrix of integration \(P\) to eliminate the integral operations. The matrix \(P\) can be uniquely determined based on the particular orthogonal functions. Typical examples are given in [6–11].
Among piecewise constant basis functions, block-pulse functions are found to be very attractive, in view of their properties of simplicity and disjointedness. Bernoulli polynomials and Taylor series are not based on orthogonal functions, nevertheless, they possess the operational matrix of integration. However, since the integration of the cross product of two Taylor series vectors is given in terms of a Hilbert matrix [12], which are known to be ill conditioned, the applications of Taylor series are limited. Furthermore, the operational matrix \(P\), in Bernoulli polynomials \(\beta _m(t),\, m=0,1,2,\ldots ,\) where \(0 \le t \le 1,\) has less errors than \(P\) for Taylor series in \(\frac{1}{2}\le t\le 1\) and \(1<m<8\). This is because for \(P\) in \(\beta _m(t)\) we ignore the term \(\frac{\beta _{m+1}(t)}{m+1}\) while for \(P\) in Taylor series we ignore the term \(\frac{t^{m+1}}{m+1}\).
For approximating an arbitrary time function the advantages of Bernoulli polynomials \(\beta _m(t),\) over shifted Chebyshev polynomials \(T_m(t)\), and shifted Legendre polynomials \(L_m(t), \, m=0,1,2,\ldots \), where \(0 \le t \le 1,\) are:
-
(a)
the operational matrix \(P\), in Bernoulli polynomials has less errors than \(P\) for shifted Chebyshev and shifted Legendre polynomials for \(1<m<10\). This is because for \(P\) in \(T_m(t)\) we ignore the term \(\frac{T_{m+1}(t)}{4(m+1)};\) and for \(P\) in \(L_m(t)\) we ignore the term \(\frac{L_{m+1}(t)}{2(2m+1)};\)
-
(b)
the Bernoulli polynomials have less terms than shifted Chebyshev polynomials and shifted Legendre polynomials. For example \(\beta _6(t)\) has 5 terms, while \(T_6(t)\) and \(L_6(t)\) have 7 terms, and this difference will increase by increasing \(m\). Hence for approximating an arbitrary function we use less CPU time by applying Bernoulli polynomials as compared to shifted Chebyshev and shifted Legendre polynomials;
-
(c)
the coefficient of individual terms in Bernoulli polynomials are smaller than the coefficient of individual terms in the shifted Chebyshev and shifted Legendre polynomials. Since the computational errors in the product are related to the coefficients of individual terms, the computational errors are less by using Bernoulli polynomials.
In recent years different types of hybrid functions have been shown to be mathematical power tools for discretization of selected problems [13–17]. In the present paper we introduce a new direct computational method to solve delay systems. The method consists of reducing the delay differential equations to a set of algebraic equations by first expanding the solution of delay differential equations as a hybrid function with unknown coefficients. These hybrid functions, which consist of block-pulse functions and Bernoulli polynomials, are introduced. The operational matrices of integration, product, and delay are given. These matrices are then used to evaluate the coefficients of the hybrid functions for the solution of the delay differential equations.
The outline of this paper is as follows: In “Properties of Hybrid Functions” section we introduce the basic properties of the hybrid functions of block-pulse and Bernoulli polynomials required for our subsequent development. Section “Problem Statement” is devoted to the problem statement. In “The Numerical Method” section we apply the proposed numerical method to approximate the multi-delay systems and piecewise constant delay systems. In “Discussion” section a discussion of the present method is given and in “Illustrative Examples” section we report our numerical findings and demonstrate the accuracy of the proposed numerical scheme by considering four numerical examples.
Properties of Hybrid Functions
Hybrid of Block-Pulse and Bernoulli Polynomials
Hybrid functions \(b_{nm}(t),\, n=1,2,\ldots ,N,\,m=0,1,\ldots ,M\) are defined on the interval \([0,t_f)\) as
where \(n\) and \(m\) are the order of block-pulse functions and Bernoulli polynomials, respectively. In Eq. (1), \(\beta _m(t),\,\ m=0,1,2,\ldots ,\) are the Bernoulli polynomials of order \(m\), which can be defined by [18]
where \(\alpha _k,\quad k=0,1,\ldots ,m,\) are Bernoulli numbers. These numbers are a sequence of signed rational numbers, which arise in the series expansions of trigonometric functions [19] and can be defined by the identity
The first few Bernoulli numbers are
with \(\alpha _{2k+1}=0,\, k=1,2,3,\ldots .\)
The first few Bernoulli polynomials are
According to [20], Bernoulli polynomials form a complete basis over the interval [0,1].
Function Approximation
Suppose that \(H=L^{2}[0,1]\) and \(\{b_{10}(t),b_{20}(t),\ldots ,b_{NM}(t)\}\subset H\) be the set of hybrid of block-pulse and Bernoulli polynomials and
and \(f\) be an arbitrary element in \(H\). Since \(Y\) is a finite dimensional vector space, \(f\) has the unique best approximation out of \(Y\) such as \(f_0\in Y,\) that is
Since \(f_0\in Y,\) there exist unique coefficients \(c_{10},c_{20},\ldots ,c_{NM}\) such that
where
and
Approximation Errors
In this section we obtain bounds for the error of best approximation in terms of Sobolev norms. This norm is defined in the interval \((a,b)\) for \(\mu \ge 0\) by
where \(f^{(k)}\) denotes the \(k\)th derivative of \(f\). The symbol \(|f|_{H^{\mu ;M}(0,1)} \) which is introduced in [21] was defined by
The seminorm [22] is
where
\( M\ge \mu -1,\) and if \(N=1,\,|\cdot |_{H^{r;\mu ;M;N}}\) coincides with \(|\cdot |_{H^{\mu ;M}}\) which was introduced in [21].
To state our main results, the following theorem and lemma will be required.
Theorem 1
Suppose that \(f\in H^\mu (0,1)\) with \(\mu \ge 0\). If \(P_Mf=\sum _{m=0}^{M}c_m\beta _m\) is the best approximation of \(f\) then
and for \(1\le r\le \mu \),
where \(c\) depends on \(\mu \).
Proof
Let \(f\in H^\mu (0,1)\) with \(\mu \ge 0\) and \(\sum _{m=0}^{M}\acute{c}_mL_m \) be the best approximation of \(f\), which is constructed by using shifted Legendre polynomials \( L_m,~m=0,\ldots ,M\) in the interval \([0,1]\). Then [21]
and for \(1\le r\le \mu \),
Since the best approximation is unique [20], we have
and by using Eqs. (9–11) we can obtain Eqs. (7) and (8). \(\square \)
Lemma 1
For \(n=1,2,\ldots ,N\) suppose \(f_n:(\frac{n-1}{N},\frac{n}{N})\rightarrow R\) is a function in \(H^\mu (\frac{n-1}{N},\frac{n}{N}).\) Consider the function \(F_nf_n:(0,1)\rightarrow R\) such that \((F_nf_n)(x)=f_n(\frac{1}{N}(x+n-1))\) for all \(x\in (0,1),\) then for \(0\le l\le \mu ,\) we have
Proof
For \(0\le l\le \mu ,\) we have
where for the third equality, we used the change of variable rule by setting \(t=\frac{1}{N}(x+n-1)\).
\(\square \)
By using the following Theorem we can obtain error for the approximation function.
Theorem 2
Suppose \(f\in H^\mu (0,1)\) with \(\mu \ge 0\), then
and for \(1\le r\le \mu \),
Proof
For \(n=1,2,\ldots ,N\) we consider the function \(f_n:(\frac{n-1}{N},\frac{n}{N})\rightarrow R\) such that \(f_n(x)=f(x)\) for all \(x\in (\frac{n-1}{N},\frac{n}{N})\). By using Lemma 1 and Eq. (7) we have
Also, for \(1\le r\le \mu ,\) by using Lemma 1 and Eq. (8) we have
\(\square \)
Conclusion Suppose \(f\in H^\mu (0,1)\) with \(\mu \ge 0,\) and \(M\ge \mu -1,\) then by using Eq. (6) and Theorem 2 we get
and for \(r\ge 1\),
This result shows that in the case \(f\) is infinitely smooth, the rate of convergence of \(P_M^Nf\) to \(f\) is faster than \(\frac{1}{N}\) to the power of \(M+1-r\) and any power of \(\frac{1}{M}\), which is superior to that for the classical spectral methods [21].
Operational Matrix of Integration and Product
The integration of the \(B(t)\) defined in Eq. (3) is given by
where \(P\) is the \(N(M+1)\times N(M+1)\) operational matrix of integration. The matrix \(P\) for \(t_{f}=1\) is given in [23] by
where \(I\) and \(O\) are \(N\times N\) identity and zero matrices respectively, and
It is seen that \(P\) is more sparse than operational matrices of integration for the hybrid of block-pulse and Chebyshev polynomials [13], the hybrid of block-pulse and Legendre polynomials [14], and the hybrid of block-pulse and Taylor series [15].
The product of two hybrid functions with the vector \(C\) is given by
where \(\tilde{C}\) is a \(N(M+1)\times N(M+1)\) product operational matrix which is given in [24].
The Operational Matrix of Multi-delay Systems
The delay function \(B(t-\eta _j), j=1,2,\ldots ,r,\) is the shift of the function \(B(t)\) defined in Eq. (3), along the time axis by \(\eta _j \), where \(\eta _1,\eta _2, \ldots , \eta _r\) are rational numbers in \((0,1)\). It is assumed that without loss of generality that \(\eta _1<\eta _2< \cdots <\eta _r\). The general expression is given by
where \(D_j\) is the operational matrix of delay of hybrid functions corresponding to \(\eta _j \). To find \(D_j\), for \(j=1,2,\ldots ,r,\) we first choose \(N\) in the following manner:
We define \(w\) as the smallest positive integer number for which \( w\eta _j\in Z\) for \(j=1,2,\ldots ,r,\) where \(Z\) is the set of all integer numbers. Next we choose \(\lambda \) as the greatest common divisor of the integers \(w\eta _j,\,j=1,2,\ldots ,r\). That is
Let
where \([\cdot ]\) denotes the greatest integer value. Thus we have different subintervals given by
With the aid of Eq. (1), it is noted that \( b_{im}(t), m=0,1, \ldots , M,\) are non zero in the interval \([\frac{i-1}{N},\frac{i}{N})\). Thus \(b_{im}(t-\eta _j)\) are non-zero in the \( [\frac{i-1}{N}+\eta _j,\frac{i}{N}+\eta _j)\). If we expand \(b_{im}(t-\eta _j)\) in terms of the element of \(B(t)\) in Eq. (3), we have \(b_{im}(t-\eta _j)=b_{\beta _{ij}m}(t) \) where \( \beta _{ij}=[N\eta _j+i].\) Thus, if we expand \(B(t-\eta _j)\) in terms of \(B(t)\) we find \(N(M+1)\times N(M+1)\) delay matrix \(D_j\) as
where \(O\) is \(N\times N\) zero matrix, and \(\psi _j\) is \(N\times N\) matrix which is given by
It is noted that the first one in the first row is located at the \(\beta _{1j}\) th column.
The Operational Matrix of Piecewise Constant Delay Systems
In this section we obtain the operational matrix of delay \(Q\) for piecewise constant delay systems. The general expression is given by
where \(a(t)\) is considered as follows:
It is assumed that \(\xi _1,\xi _2, \ldots , \xi _r\) are rational numbers in \([0,1)\), and \(\xi _1<\xi _2< \cdots <\xi _r\). We first choose \(N\) in the following manner: Let
and define \(\gamma \) as the smallest positive integer number for which
Next suppose \(|K|=\alpha ,\) and choose \(\delta \) as the greatest common divisor of the integers \(\gamma \xi _i\) and \(\gamma T_j,~i\in K,\,j=1,2,\ldots ,s-1.\) That is
Let \(h=\frac{\delta }{\gamma }\) and select \(N\) to minimize the number of subintervals as
Thus we have different subintervals given by
For these subintervals we can redefine \(a(t)\) as
\(a(t)=\xi _i\) for \(h\left( \,\,\sum \limits _{l=0}^{i-1}N_l\right) \le t<h\left( \,\,\sum \limits _{l=0}^{i}N_l\right) ,\quad i=1,2,\ldots ,s\),
where
clearly \(\sum _{j=1}^{s}N_j=N\). Therefore the problem has been reduced to find the delay operational matrix for the following delay function:
For evaluating \(v_j\) first we choose \(i\) as the smallest positive integer number such that
Then we choose \(v_j\) in such a way that
In order to construct the matrix \(Q\), we first find the matrix \(Q_i\) for \(i=1,2,\ldots ,N\) in such a way that the following relation is satisfied:
With the aid of Eq. (1), it is noted that for the case \(t_{i-1}\le t<t_i,\) the only terms with nonzero values are \(b_{(i-v_i)m}(t-v_ih)\), for \(m=0,1,\ldots ,M\). Since
we have
where \(I_{M+1}\) is the \((M+1)\) dimensional identity matrix and \(S_i\) is an \(N\times N\) matrix in which the only nonzero entry is equal to one and located at the \((i-v_i)\)th row and \(i\)th column and \(\otimes \) denotes Kronecker product [25]. It is noted that if \(i-v_i\le 0,\) then \(S_i\) is a zero matrix of order \(N\times N.\) Thus, if we expand \(B(t-a(t))\) in terms of hybrid functions \(B(t),\) we get
Problem Statement
Consider the following linear time-varying delay system:
where \(X(t)\in R^l,\,U(t)\in R^q,~E(t), F_j(t)\,\,j=1,2,\ldots ,r, H(t)\) and \(G(t)\) are matrices of appropriate dimensions, \(X_0\) is a constant specified vector, \(\kappa _1\) and \(\kappa _2\) are either \(0\) or \(1\) such that if \(\kappa _1=1\) then \(\kappa _2=0\) and vice versa, also if \(\kappa _1=0\) then \(\phi (t)=0\). The problem is to find \(X(t),~0\le t\le 1,\) in Eq. (23) satisfying Eqs. (24) and (25). The method of this paper can also be extended to cases with delays in both state and control.
The Numerical Method
We approximate \(X(t)\) in Eq. (23) as follows:
where \(I_{l}\) and \(I_{q}\) are the \(l\)- and \(q\)-dimensional identity matrices. Also, \(\hat{B}(t)\) and \(\hat{B_{1}}(t)\) are \(l(M+1)N\times l\) and \(q(M+1)N\times q\) matrices, respectively. By using Eq. (2) each of \(x_{i}(t)\) and each of \(u_{j}(t),\quad i=1,2,\ldots ,l,\quad j=1,2,\ldots ,q,\) can be written in terms of hybrid functions as
From Eqs. (26) and (27) we get
where \(X\) and \(U\) are vectors of order \(l(M+1)N\times 1\) and \(q(M+1)N\times 1,\) respectively, given by
Similarly we have
where \(d\) and \(R_j,\,j=1,2,\ldots ,r\) are vectors of order \(l(M+1)N\times 1\). We expand \(E(t), F_j(t),\,H(t) \) and \(G(t)\) by hybrid functions as follows:
where \(E^{T}, F_j^{T}, H^T\) and \(G^{T}\) are of dimensions \(l\!\times \! l(M\!+\!1)N, l\!\times \! l(M\!+\!1)N\) and \(l\!\times \! q(M+1)N\), respectively. We can write \(X(t-\eta _j)\) and \(X(t-a(t))\) in terms of hybrid functions as
and
where
\({D_j},\) and \(Q\) are the delay operational matrices given in Eqs. (18) and (20). Now we have
where \(\tilde{E},\,\tilde{G}\) and \(\tilde{H}\) can be calculated similarly to matrix \(\tilde{C}\) in Eq. (17). Also we have
where \(P\) is the operational matrix of integration given in Eq. (16) and
where \(Z_j\) is a constant matrix of order \(l(M+1)N\times l(M+1)N\). By integrating Eq. (23) from \(0\) to \(t\) and using Eqs. (24–34) we have
From Eq. (35) we get \(X\) as
Hence, \(X(t)\) in Eq. (28) can be obtained.
Discussion
Due to the nature of time-delay systems, the exact solutions of these systems are different functions on the distinct subintervals. In such situations, neither the continuous basis functions nor piecewise constant basis functions taken alone would form an efficient basis in the representation of such solutions. Datta and Mohan [26] have correctly pointed out that, in general, the computed response of the delay systems via continuous or piecewise constant basis functions is not in good agreement with the exact response of the system. To meet these situations, we choose a suitable hybrid system of basis functions inherently possessing the required features of the solutions corresponding to delay systems. In the proposed method, with the aid of Eqs. (19) and (21) we determine the appropriate value for \(N\), the order of block-pulse functions for multi-delay and piecewise constant delay systems respectively. To select \(M,\) we first choose an arbitrary number depending on the problem. If the exact solutions in each subinterval are polynomials we increase the value of \(M\) by 1 until two consecutive results are the same in each subinterval. When the exact solutions in each subinterval are not polynomials, we evaluate the results for two consecutive \(M\) for different \(t\) in \([0,1]\) until the results are similar up to a required number of decimal places for each subinterval.
Illustrative Examples
In this “The Numerical Method” section, examples are given to demonstrate the applicability and accuracy of our method. Example 1 is a two-dimensional time-varying multi-delay system which was considered in [26]. The exact solutions in Examples 1 are polynomials for each subinterval. Example 2 is a delay system with delay in both control and state. Example 2 was first considered in [26] and also solved in [13–15] by using the hybrid of block-pulse with Chebyshev polynomials, with Legendre polynomials, and with Taylor series respectively. In this example we compare the solution obtained using the proposed method with [13–15]. The CPU time in each case are also given. Example 3 is a time-varying piecewise constant delay system whose solution is a polynomial for each subinterval and was considered in [5]. Example 4 is a piecewise constant delay system which was first considered in [26] and also solved in [5] by using the hybrid of block-pulse and Chebyshev polynomials. For example 4, we compare our findings with the numerical results in [5] together with the CPU time.
Example 1
Consider the multi-delay systems described by [26]
with
The exact solutions are [26]
By using Eq. (19) we have \( \omega =3\) and \(\lambda =1\), so we select \(N=3\). We also choose \(M=6\). Let
By using Eq. (2) we get
and
Also we have
where \(\underline{D}_1\) and \(\underline{D}_2\) are the delay operational matrices given in Eq. (18). By integrating Eq. (36) from 0 to \(t\) and using Eqs. (37–44) we have
where \(\widetilde{Y}_1\) and \(\widetilde{Y}_2\) can be obtained similarly to Eq. (17). Solving Eqs. (45) and (46), the same values as the exact values of \(x_{1}(t)\) and \(x_{2}(t)\) would be obtained.
Example 2
Consider the following delay system with delay in both control and state [26]
The exact solution is
By using Eq. (19) we have \( \omega =4\) and \(\lambda =1\), so we select \(N=4\). We also choose \(M=5\). Let
by using Eq. (2) we have
Also we have
where \(\underline{D}_3\) is the delay operational matrix given in Eq. (18). By integrating Eq. (47) from \(0\) to \(t\) and using Eqs. (48–52) we have
By solving Eq. (53) we obtain \(C_{3}\). In Table 1, the solution obtained using the hybrid of block-pulse and Chebyshev polynomials in [13] with \(N=4\) and \(M_1=7\) and the hybrid of block-pulse and Legendre polynomials in [14] with \(N=4\) and \(M_2=7\) together with CPU time are given. In this table \(M_1\) and \(M_2\) denote the order of Chebyshev and Legendre polynomials respectively. In Table 2, the solution obtained using the hybrid of block-pulse and Taylor series in [15] with \(N=4\) and \(M_3=7\) and the proposed method with \(N=4\) and \(M=5\) together with CPU time and the exact solution of \(x(t)\) for \(\frac{1}{4}\le t\le 1\) are given. In this table \(M_3\), denotes the order of Taylor series. In Tables 1 and 2, the approximate value of \(x(t)\) on \([0,\frac{1}{4}]\) is equal to zero, which is the same as the exact solution.
Example 3
Consider the following piecewise constant delay system [5]
The exact solution is
By using Eqs. (21) and (57) we have \( \gamma =10\) and \(\delta =1\), so we choose \(N=10\). We also choose \(M=8\). Let
by using Eq. (2) we have
Also we have
where \(\underline{D}_4\) is the delay operational matrix given in Eq. (20) and is obtained from
where \(\underline{Q}_i,~~1\le i \le 10\) are calculated similarly to Eq. (22). For example \(\underline{Q}_3\) is
where \(I_9\) is the 9 dimensional identity matrix and \(\underline{S}_3\) is a \(10\times 10\) matrix given by
By integrating Eq. (54) from \(0\) to \(t\) and using Eqs. (55–62) we have
where \(\widetilde{Y}_3\) can be obtained similarly to Eq. (17). By solving Eq. (63) the same value as the exact value of \(x(t)\) would be obtained.
Example 4
Consider the following piecewise constant delay system [26]
The exact solution is
By using transformation \(\tau = 2t,\,0 \le t \le 1\), we have
From Eqs. (21) and (67) we have \( \gamma =100\) and \(\delta =5\), so we select \(N=20\). We also choose \(M\) an arbitrary positive integer number. Let \(M=1\) and
by using Eq. (2) we have
Also we have
where \(\underline{D}_5\) is the delay operational matrix given in Eq. (20). By integrating Eq. (64) from \(0\) to \(t\) and using Eqs. (65–70) we have,
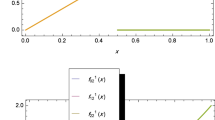
By solving Eq. (71) we obtain \(C_{5}\). In Table 3, we compare maximum error obtained using the proposed method with the hybrid of block-pulse and Chebyshev polynomials in [5]. The approximate solution of \(x(t)\), obtained by the proposed method for \(M=1\) and 2, are shown in Figs. 1 and 2 respectively.

Exact and approximate solution of \(x (t)\) for \(M=1\)

Exact and approximate solution of \(x (t)\) for \(M=2\)
Conclusion
In the present work, hybrid of block-pulse functions and Bernoulli polynomials are used to solve delay systems. The problem has been reduced to a problem of solving a system of algebraic equations. The matrix \(P\) given in Eq. (16) has a large number of zero elements and is sparse. Hence, the present method is very attractive and reduces the CPU time and computer memory. Illustrative examples are given to demonstrate the validity and applicability of the proposed method. It is noted that the exact solutions obtained in the examples 1, 2 and 4 can not be obtained either with piecewise constant basis functions nor with continuous basis functions.
References
Malek-Zavarei, M., Jamshidi, M.: Time Delay Systems: Analysis Optimization and Applications North-Holland Systems and Control Series. Elsevier, New York (1987)
Cai, G., Huang, J.: Optimal control method with time delay in control. J. Sound Vib. 251, 383–394 (2002)
Zhang, J., Knospe, C.R., Tsiotras, P.: New results for the analysis of linear systems with time-invariant delays. Int. J. Robust Nonlinear Control 13, 1149–1175 (2003)
Abdulaziz, O., Hashim, I., Chowdhury, M.S.H.: Solving variational problems by homotopy perturbation method. Int. J. Numer. Methods Eng. 75, 709–721 (2008)
Marzban, H.R., Shahsiah, M.: Solution of piecewise constant delay systems using hybrid of block-pulse and Chebyshev polynomials. Optim. Control Appl. Methods 32, 647–659 (2010)
Hwang, C., Shih, Y.P.: Optimal control of delay systems via block pulse functions. J. Optim. Theory Appl. 45, 101–112 (1985)
Palanisamy, K.R., Rao, G.P.: Optimal control of linear systems with delays in state and control via Wash functions. IEE Proc. D. Control Theory Appl. 130, 300–312 (1983)
Hwang, C., Shih, Y.P.: Laguerre series direct method for variational problems. J. Optim. Theory Appl. 39, 143–149 (1983)
Horng, I.R., Chou, J.H.: Shifted Chebyshev direct method for solving variational problems. Int. J. Syst. Sci. 16, 855–861 (1985)
Chang, R.Y., Wang, M.L.: Shifted Legendre direct method for variational problems. J. Optim. Theory App. 39, 299–307 (1983)
Razzaghi, M.: Optimal control of linear time-varying systems via Fourier series. J. Optim. Theory Appl. 65, 375–384 (1990)
Razzaghi, M., Razzaghi, M.: Instabilities in the solution of a heat conduction problem using Taylor series and alternative approaches. J. Frankl. Inst. 326, 683–690 (1989)
Razzaghi, M., Marzban, H.R.: A hybrid domain analysis for systems with delays in state and control. Math. Probl. Eng. 7, 337–353 (2001)
Marzban, H.R., Razzaghi, M.: Solution of time-varying delay systems by hybrid functions. Math. Comput. Simul. 64, 597–607 (2004)
Marzban, H.R., Razzaghi, M.: Analysis of time-delay systems via hybrid of block-pulse functions and Taylor series. J. Vib. Control 11, 1455–1468 (2005)
Wang, X.T., Li, Y.M.: Numerical solutions of integro differential systems by hybrid of general block-pulse functions and the second Chebyshev polynomials. Appl. Math. Comput. 209, 266–272 (2009)
Singh, V.K., Pandey, R.K., Singh, S.: A stable algorithm for Hankel transforms using hybrid of block-pulse and Legendre polynomials. Comput. Phy. Commun. 181, 1–10 (2010)
Costabile, F., Dellaccio, F., Gualtieri, M.T.: A new approach to Bernoulli polynomials. Rend. Mat. Ser. VII 26, 1–12 (2006)
Arfken, G.: Mathematical Methods for Physicists, 3rd edn. Academic press, San Diego (1985)
Kreyszig, E.: Introductory Functional Analysis with Applications. Wiley, New York (1978)
Canuto, C., Hussaini, M.Y., Quarteroni, A., Zang, T.A.: Spectral Methods, Fundamentals in Single Domains. Springer, Berlin (2006)
Marzban, H.R., Tabrizidooz, H.R., Razzaghi, M.: A composite collocation method for the nonlinear mixed Volterra–Fredholm–Hammerstein integral equations. Commun. Nonlinear Sci. Numer. Simul. 16, 1186–1194 (2011)
Mashayekhi, S., Ordokhani, Y., Razzaghi, M.: Hybrid functions approach for nonlinear constrained optimal control problems. Commun. Nonlinear Sci. Numer. Simul. 17, 1831–1843 (2012)
Mashayekhi, S., Ordokhani, Y., Razzaghi, M.: Hybrid functions approach for optimal control of systems described by integro-differential equations. Appl. Math. Model. 37, 3355–3368 (2013)
Lancaster, P.: Theory of Matrices. Academic Press, New York (1969)
Datta, K.B., Mohan, B.M.: Orthogonal Functions in Systems and Control. World Scientific, Singapore (1995)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mashayekhi, S., Razzaghi, M. & Wattanataweekul, M. Analysis of Multi-delay and Piecewise Constant Delay Systems by Hybrid Functions Approximation. Differ Equ Dyn Syst 24, 1–20 (2016). https://doi.org/10.1007/s12591-014-0203-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12591-014-0203-0