
Abstract
In this paper, a new modification of the mechanical load-bearing ring structure is considered. It is shown that due to the appropriate changes made to the ring, its structure possesses obvious advantages as compared with the previously proposed variant. The projecting tips of the struts to which the central flexible shaping system is attached are replaced by paired levers with torsion springs of new design, which guarantee the smooth deployment of the ring and keep the cables in permanently tensioned condition. In the new modification, the central flexible shaping system is directly attached to the upper and lower hoops of the ring, thereby preventing the bending of struts when the reflector is completely deployed. The new multi-stage deployment scheme of the structure considered in the paper operates without synchronization mechanisms—the upper and lower kinematic chains get deployed not simultaneously as in the previous ring variant but in alternating order. The validity of design computations is confirmed by the FEM mathematical models for which deformations of structural elements, displacement of nodes, and eigenfrequency values are determined. The optimization of structural elements makes it possible to design the mechanical characteristics and strength margin of the ring with a minimal number of elements and minimal cross-sectional values, which simplifies the ring structure on the whole, and reduces its weight.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Preliminary
The results presented in the paper were obtained in the course of cooperation on the joint projects between the Institute of transformable space structures of Georgian Technical University headed by academician E. Medzmariashvili and the ESA-ESTEC Structures Section headed by Dr. J. Santiago Prowald. Some of the results were announced at the Workshops on Large Deployable Antennas, November 15–17, 2016, and October 03–06, 2017, at ESTEC, Noordwijk, The Netherlands.
The reflecting capacity of the space reflector surface much depends on the structural features of its mechanical load-bearing ring. In the final stage of deployment, when the system is completely stressed, the constituent parts of the ring experience undesirable bending strains which can be minimized and even completely eliminated by making appropriate changes to the load-bearing ring structure. For the solution of this problem, we propose our latest structural modification of the ring. The optimization of its structural elements is the subject of our present discussion [1,2,3 ].
In our previous work [4, 5], we just touched upon the design modification of the space reflector ring without synchronization elements. However, we did not go into details concerning self-synchronization during the deployment process. The present paper closes this gap and continues the developments of [4, 5]. We propose certain design innovations of the mechanical load-bearing ring of the deployable space reflector. In the first place, we think that it is appropriate to recall some known basic facts.
The load-bearing ring of the transformable space reflector is a structure of truncated cone configuration with the upper and lower hoops (kinematic chains) 6000 mm and 4480 mm in diameter, respectively. The distance between the hoops is 1316.36 mm and the length of the struts which interconnect them is 1520 mm. The diameter of the struts and V-folding bars is 14 mm, and their wall thickness is 1 mm.
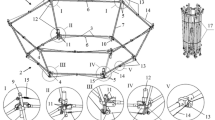
The load-bearing ring of the transformable space reflector has the following main components (Figs. 1, 2):

New modification of the load-bearing ring and its main components. a, b Deployed and stowed states; c, d inside and outside views of the main joint; e central joint

Previous variant of the mechanical load-bearing ring structure and its assembled main components. a, b Deployed and stowed states; c, d inside and outside views of the main joint; e central joint
large upper hoop 1 with hinge-connected V-folding bars 3;
small lower hoop 2 with hinge-connected V-folding bars 3;
ring deployment mechanism (RDM) consisting of motors 9 with reduction gears, upper and lower cable–pulley systems 10 and central hinges 6 with paired levers 12;
paired braces 15 between upper and lower brackets 4.
The upper 1 and lower 2 chains are interconnected by struts 7 and radially revolute joints 8 (Fig. 1c) that are located in the central parts of corner brackets 4.
Below, we compare the available two variants of the ring structure and focus attention on the structural differences between them, see Figs. 1 and 2 (the numbering of constituent parts is identical for both variants).
2 New design modification of the load-bearing ring versus the previous variant
2.1 Struts
In our new modification (Fig. 1e), we introduce paired levers 12 instead of the projecting upper and lower tips 17 (Fig. 2c, d) of the struts to which the central flexible shaping system (not shown in the figures for simplicity) is attached. Additional paired levers 12 are located at central joints 6 of V-folding bars 3.
The ring deployment mechanism (RDM) of both ring structure variants consists of upper and lower electric motors with reduction gears 9; upper and lower cable–pulley systems 10, 11; and torsion springs 13 of different modifications installed in the central joints of V-folding bars (Figs. 1e, 2e). In both variants, torsion springs 13 resist the deployment force, and thus, the deployment cables remain in the permanently tensioned state [6,7,8,9,10,11,12,13], which is an important characteristic for the safe deployment of the structure.
In the previous ring structure, three guiding rollers 11 are installed above the main joint (Fig. 2c, d), of which the central one is installed on the horizontal plane, while in the new variant, two rollers are installed directly on main brackets 4 (Fig. 1c, d) and the central roller is replaced by the grooved Teflon plate placed above brackets 4.
2.2 Deployment kinematics of the paired levers
Here, we consider in detail the kinematic scheme of the central joint of new modification, and illustrate the deployment of one section as an example (Figs. 3, 4).

Deployment of one section. a Stowed state; b intermediate deployed state; c fully deployed state

Deployment of the additional pairs of the RDM levers. a Stowed state; b intermediate deployed state; c fully deployed position
By the joint action of the deployment mechanisms and torsion springs, the deployment cables are maintained in permanently tensioned condition in any stage of deployment. This effect makes it possible to deploy the upper and lower hoops not simultaneously but in alternating order. We thus prevent the risk that the flexible central part might get entangled with V-folding bars and thereby simplify the deployment process, because, as different from the one-stage deployment, each of the kinematic chains can be controlled separately.
Alternating fixation of conical ring sections in the intermediate positions due to the joint work of the deployment mechanisms and torsion springs is a specially noteworthy feature of the multi-stage deployment process.
Figure 4 demonstrates how additional paired levers 12 of the RDM move apart from each other at the time of deployment of the V-folding bars. We draw attention to the directions of the segments AB and BC and the distance between the hinged joints A and C during the deployment.
In the stowed state, the distance between the hinged joints A and C is minimal—AC = lmin (Fig. 4a), but it increases up to a maximal value in the intermediate position of V-folding bars—AC = lmax (Fig. 4b). In the intermediate position, the hinged joints A, B, and C lie on the straight line. After the full deployment of the load-bearing ring, the segments AB and BC “break” in the opposite directions, because the joint B does not lie on the imaginary symmetry axis of the V-folding bar (Fig. 4c). After the ring gets completely deployed, AC becomes slightly shorter (ld.p.–deployed position). Thus, under the action of force F produced by deployment cable 10, the central joint B “jumps” into the terminal position and gets automatically fixed.
2.3 New multi-stage deployment scheme of the ring
In the compactly stowed package, bar 3 is held in the vertical position by hold-down devices 16 (Figs. 1b, 2b), while the main brackets are in the horizontal position due to extension of braces 15. Such an arrangement provides extra elastic energy for initiating deployment as soon as the hold-down devices are released.
Under the action of tensioned paired braces 15, upper and lower brackets 4 slightly deflect in the opposite directions (Fig. 5). Concurrently, the electric drives, the cable–pulley system, and V-folding bars deflect, too. Thus, we have the fulfilment of the condition XupXlow [4, 5], which ensures the geometrical stability of the sections of the conical ring during deployment.

Ring section under the action of force produced by tensioned braces. a Deployed state; b side view of the stowed state
Theoretically, one pair of braces is quite sufficient for the tilting of the upper and lower kinematic chains, but, optionally, three pairs of braces can be installed for higher reliability, Fig. 6.

Deployed ring structure under the action of force produced by three pairs of tension braces
Figure 7 shows the three-stage deployment of the ring, though, in general, the transformation process of the ring structure can be accomplished in a greater number of stages. The greater the number of deployment stages, the better for the reliability of deployment.

Multi-stage deployment process of the ring with V-folding bars (RDM cables and paired braces schematically are shown only for the last deployment stage III in red lines)
Note that in Figs. 1, 2, 6, and 7, we schematically show only the principles of operation of the structure, and in our case, the number of sections is chosen conditionally and does not correspond to the real structure.
After the release of the hold-down mechanisms, the first push and the deflection of V-folding bars certainly diminish the risk of the central part getting entangled with the ring elements (Fig. 7). In the first stage of deployment, only the drives of the lower kinematic chain are set in operation and the chain becomes half-deployed.
In the next stage, only the drives of the upper kinematic chain operate. As a result, the upper chain gets fully deployed; in the last third stage, the lower chain gets fully deployed and the whole structure gets fixed in the designed position.
As compared with our previous variant with one-stage deployment, in which case the synchronization elements (gear wheels) are installed in the lower kinematic chain only [4, 5, 11], for the multi-stage deployment, the situation is different. Synchronizing elements are not required at all, and naturally, without them, the load-bearing ring is simpler in design and lightweight.
In the new modification, the upper kinematic chain deploys freely and does not stretch the central part which remains in the slackened state. It transforms to the tensioned state only after the lower kinematic chain gets fully deployed. Therefore, the number of electric drives in the upper kinematic chain can be chosen less than in the lower one.
3 FEM mathematical models
To check the validity of our computations, we have constructed two FEM mathematical models for the previous ring structure variant and the latest one. In the former case, loads are applied to the projecting tips of the struts, whereas in the latter, case loads are applied directly to the kinematic chains.
Computations were performed by NASTRAN software. The models are based on the bar finite elements. Units of forces and displacements are given in Newton and meter, respectively (Figs. 8, 9).

FEM mathematical model of the reflector structure (previous variant)

FEM mathematical model of the reflector structure (new variant)
Degrees of freedom of hinges are simulated in local coordinate systems and are as much as possible approximated to the real model.
The stressed state of both structures is provided by radial forces applied to the points of connection of the central part and the hoops. Force applied to each node is taken to be equal to 50 N. Both modelled structures are assumed to be rigidly fixed at their central hubs.
It is understood that the above schemes do not correspond to the real situation, because in reality, the reflector is attached to the platform by means of one of the struts. In our case of hub fixation, the deformed state of the modelled structures differs very little from the real picture. We want to show the symmetric pictures of the deformed models only for clarity.
The stressed states of the models are shown in Figs. 10 and 11.

Total translations of the ring’s nodes (previous variant)

Total translations of the ring’s nodes (new variant)
As for displacements of nodes, we observe that in our new modification, they vary in the range of 0.0063 ÷ 1.01 mm, and in the range of 0.108 ÷ 1.73 mm in the case of our previous variant..
Based on the above models, we constructed two more models to determine values of their natural oscillation frequencies. That time, the fixation of each model was realized by means of one strut. Appropriate masses were applied to the upper and lower corners of the models.
The Table 1 contains the first five numerical eigenfrequency values for both variants.
The obtained results confirm that in the new modification, displacements of the nodes of ring elements have smaller values, and therefore, the entire structure is more rigid. It is obvious that the new modification of the conical ring structure has advantages as compared to our previous variant.
4 Conclusions in brief
The latest structural modification of the load-bearing ring of the deployable space reflector is considered versus the previous variant. The detailed drawings clearly illustrate the differences between the available two variants. The latest structural innovations of the ring are summarized as follows:
Important structural changes are made to the ring deployment mechanisms. In particular, the projecting tips of the struts to which the central flexible shaping system is attached are replaced by paired levers with torsion springs of new design, which ensure the smooth deployment of the ring and keep the cables in permanently tensioned condition;
The central flexible shaping system is directly attached to the upper and lower hoops of the ring, thereby preventing the bending of struts when the reflector is completely deployed;
After the release of the hold-down devices, the V-folding bars pop-out and, by inertia, the stowed package slightly increases in diameter;
In any stage of deployment, the deployment cables are maintained in permanently tensioned condition by the joint action of deployment mechanisms and torsion springs. This effect makes it possible to deploy the upper and lower hoops not simultaneously, as in the previous ring variant, but in alternating order;
The initial increase of the stowed package diameter and subsequent process of multi-stage deployment of the ring prevent the risk of overlapping of the V-folding bars by the flexible central part;
In the case of multi-stage deployment, the structure operates without synchronization elements, which simplifies the design and makes the conical ring lightweight;
In the case of multi-stage, deployment is no need to select cable winding drums with different diameter values for simultaneous deployment of the upper and lower kinematic chains, because they deploy in turns;
The validity of all computations connected with the optimization of structural components of the ring and their compliance with the pre-assigned requirements for rigidity are confirmed mathematically by the FEM models constructed in the NASTRAN software. The first five numerical eigenfrequency values are determined, which show a high rigidity characteristic of the new load-bearing ring modification.
To conclude, the above improvements of the ring structure make it an interesting product due to such attractive qualities as simplified design with small mass, high deployment reliability, low consumption of materials, and conical configuration which adds to rigidity.
References
Tserodze, Sh., Medzmariashvili, E., Tsignadze, N., Tusishvili, O., Santiago-Prowald, J., Baier, H., Scialino, L., Mangenot, C.: The structure of conical reflector with v-fold bar’s deployable ring. In: Proceedings of Workshop on large deployable antennas, ESTEC, Noordwijk, 2–3 October 2012
Tserodze, Sh., Prowald, J.S., Gogilashvili, V., Chkhikvadze, K., Tsignadze, N., Chapodze, A., Nikoladze, M.: New design of transformable mechanical cone system with v-folded bars. In: Proceedings of the 2nd International Scientific Conference on Advanced Lightweight Structures and Reflector Antennas, Tbilisi, Georgia, 1–3 October 2014
Qi, Xiaozhi, Li, Bing, Deng, Zongquan, Liu, Rongqiang, Guo, Hongwei: design and optimization of large deployable mechanism constructed by myard linkages. CEAS Space J. 5, 147–155 (2013)
Tserodze, Sh, Prowald, J.S., Gogilashvili, V., Chkhikvadze, K.: Transformable reflector structure with V-folding bars. CEAS Space J 8(4), 291–301 (2016)
Tserodze, Sh., Prowald, J.S., Scialino, L., Medzmariashvili, E., Tsignadze, N., Nikoladze, M.: Mechanical supporting ring for space reflector and method of deployment of the same, Patent GE 6801, H01Q 15/20, Georgian Technical University, http://www.sakpatenti.gov.ge/en/publications/?subject=OFFICIALBULLETINSOFINDUSTRIALPROPERTY bulletin #1, pp. 6–7, 2018 (in Georgian)
Medzmariashvili, E., Bedukadze, G., Datashvili, L., Gogava, Z., Gomelauri, G., Sutidze, D., Salaridze, R., Tserodze Sh.: Engineering constructions of concentrators, power transmitting and receiving antennas and solar batteries large squares for space electric station. In: Fourth European Space Power Conference, Poiltiers, France, 4–8 Sept 1995
Medzmariashvili, E., Tserodze, Sh., Gogilashvili, V., Sarchimelia, A., Chkhikvadze, K., Siradze, N., Bedukadze, G.: Some peculiarities of the creation of deployable ring-shaped space antenna reflectors using flexible bars and ropes. In: Proceedings of the European Conference on spacecraft structures, materials and mechanical testing 2005 (ESA SP-581) provided by the NASA astrophysics data system, Noordwijk, 10–12 May, 1–11 2005
Medzmariashvili, E., Tserodze, Sh. Tsignadze, N. Sanikidze, M., Datashvili, L., Sarchimelia, A., Chkhikvadze, K., Siradze, N., Bedukadze, G.: A new design variant of the large deployable space reflector. In: 10th Biennial International Conference on engineering, construction, and operations in challenging environments and second NASA/ARO/ASCE workshop on granular materials in lunar and martian exploration, League Houston 2006
Medzmariashvili, E., Tsebarze, Sh, Gogilashvili, V., Sarchimelia, A., Chkhikvadze, K., Siradze, N., Tsignadze, N., Sanikidze, M., Nikoladze, M., Datunashvili, G.: New variant of the deployable ring-shaped space antenna reflector. Space Commun. J. 22(1), 41–48 (2009)
Van ‘t Klooster, C.G.M., Medzmariashvili, E., Tsebarze, S., Datashvili, L., Tsignadze, N.: Large deployable reflector configuration for spacebased applications in telecommuni-cations, science and remote sensing. In: Proceedings of International Scientific Conference advanced lightweight structures and reflector antennas, Tbilisi, Georgia, 14–16 October 2009
Tserodze, S., Medzmariashvili, E., Tsignadze, N., Tusishvili, O., Santiago-Prowald, J., Baier, H., Scialino, L., Mangenot, C.: The structure of conical reflector with v-fold bar’s deployable ring. In: Proceedings of InterNational Scientific Conference Workshop on large deployable antennas, The Netherlands, 2–3 October 2012
Tsebarze, S., Medzmariashvili, E., Tusishvili, O., Tsignadze, N., Santiago-Prowald, J., van ‘tKlooster, C.G.M., Medzmariashvili, N.: Mechanical supporting ring structure. CEAS Space J 5(3–4), 185–194 (2013)
Tserodze, Sh., Tsignadze, N., Medzmariashvili, E., Datashvili, L., Santiago Prowald, J.B.: Mechanical supporting ring structure. Patent of USA, No US9153860(B2) 2015
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Tserodze, S., Prowald, J.S., Chkhikvadze, K. et al. Latest modification of the deployable space reflector structure with V-folding bars. CEAS Space J 12, 163–169 (2020). https://doi.org/10.1007/s12567-019-00281-9
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-019-00281-9