
Abstract
Very large floating structures (VLFS) are usually composed of a number of structural modules. These are a set of semi-submersible floating bodies with similar sizes, connected by several connectors with a specific rigidity. Due to the potential severe sea states that the VLFS may encounter, the connectors become the most critical devices and inevitably the weakest link, determining the strength capacity of the entire structure. To ensure the structural safety and the integrity of the VLFS, the strength of the connectors needs to be evaluated accurately. This study numerically explores the strength of the hinge type connectors. Considering the dynamic characteristics of the connectors, a strength model of flexible connector is proposed and analysed. The results indicate that the hinged type flexible connector with hollow circular variable-cross-section pin shaft is capable of adjusting the stiffness of the whole structures and decreasing the shocks and abrasion by filling with flexible materials. Therefore, the safety and reliability of the module connections in a VLFS can be guaranteed.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The very large floating structure (VLFS) is a multi-module floating system composed of a set of semi-submersible floating bodies with the same sizes, which are connected by connectors with a specific rigidity. The VLFS has been intensively studied in the field of marine structural research. There are four international conferences on the very large floating structures organised in Japan (1991, 1999) and in USA (1996, 2001) separately. The box-type floating structures studied in Japan, due to the simple shapes and assumption, can be easily deemed two-dimensional (2D) flexible buoyant plate at sea surface. Owing to excellent seakeeping, the mobile offshore bases with the columns connected along the length could be the optimised choice at the marine structural design.
However, due to the large scale of structures and long durations floating at sea, it is inevitable for the VLFS to encounter severe sea states. Among various structural components within a VLFS, the connectors are the most critical devices and nevertheless the weakest link members. When the environmental load is greater than the designed load, the connector will be partially damaged and in severe scenarios, the overall structure of the VLFS will fail. To ensure the safety and the structural integrity of the VLFS, the strength of the connectors needs to be evaluated. In general, connectors for VLFS use an articulated, flexible connection that adjusts the stiffness of the whole structures and decreases the loads by filling with flexible materials. The hinge and the flexible material result in nonlinearities in the mechanical analysis, and hence it could be difficult to assess the strength of such connectors. Furthermore, in order to reducing the total weight, the connectors can be designed for the hinge type with the hollow shaft. Therefore, before the structural assessment of the connectors, the loads prediction should be applied precisely at first.
In order to achieve this, the three-dimensional (3D) linear hydroelastic theory was initially proposed by Wu [1]. He studied the fluid-structure interactions of multi-rigid-body modules elastically connected and obtained the motions and deformation of structures at different wave directions, as well as the dynamic response of the connectors. Based on the 3D potential flow theory and the Green’s function method, Ertekin et al. [2] and Riggs et al. [3] took into account the hydrodynamic interaction between rigid-body modules and calculated the motion and loads of five-module mobile offshore base. Comparison of unconnected, flexible connected, and rigid connected conditions was achieved. Yu [4] analysed the impact of the interaction forces between modules of mobile offshore bases, and other influences such as connector stiffness, wave angles, and sea conditions. Qi et al. [5] used rigid module flexible connector model to calculate the hydrodynamic performances of the floating body near the island reef based on the 3D potential flow theory and obtained the dynamic response of the connectors. In addition, Qi et al. [6] designed a flexible connector model. Through the static tensile and compression tests of connectors with different amplitudes and load combinations, the stiffness characteristics of super-large floating body connectors were studied. The influence of combined loads on connector stiffness was discussed. Zhang et al. [7] calculated the hydrodynamic motions and dynamic response of a mobile base system composed of different numbers of semisubmersible modules under regular and irregular waves. Liu et al. [8] compared the dynamic responses of three different models under the condition of sea state 7 and explored the effect on the dynamic characteristics of the connector in shallow water. Furthermore, Xu et al. [9] gave an adaptive optimal control method, named amplitude death, to suppress the oscillation of VLFS system consists of multiple modules connected by flexible connectors with strong nonlinearity in geometry.
Although the loads prediction and dynamic responses of connectors are well known in terms of rigid and flexibility, the structural details have not been solved yet, especially for two different materials in contacted. Flexible connectors with uncertain stiffness need to be analysed considering nonlinearity. Zhu et al. [10] proposed a flexible connector structure to model by the finite element’s method for nonlinear analysis. Lu et al. designed a hinged type flexible connector with hollow circular variable-cross-section pin shaft for the load characteristics of super-large floating structures, and basically analysed the strength of the flexible connector with varying stiffnesses [11, 12]. Zhou et al. [13] compared the strength of connectors with different diameters of solid shaft considering contact pairs and gave the suggestion that the diameter of the pin and the thickness of the ears should be determined according to the design load and the preliminary design dimensions.
In this paper, the VLFS with horizontal pontoons is taken as the research object. Considering the dynamic characteristics of the connectors, a strength model of flexible connector is proposed and analysed.
2 Methodology
2.1 Very Large Floating Structures
The very large floating body, which is design by China Ship Scientific Research Center (CSSRC), is composed of five modules and eight connectors. The modules are represented by M1-M5, and the connectors are represented by C1-C8 in the Fig. 1. The five modules have the same geometry. Each module i (i = 1, 2, 3, 4 and 5) has the corresponding Cartesian coordinate system oi-xiyizi. The xi-axis is from the aft perpendicular (A.P.) to the forward perpendicular (F.P.); yi-axis is from the starboard side to port side and zi-axis is pointing upward from the oi, which is denoted the centre of gravity of the module. With the same directions, the Cartesian coordinate system O-XYZ is defined as follows, the origin of the system is the gravity of the VLFS; the X-axis points out from the M1 to M5; Y-axis is from the starboard side to port side and Z-axis points upward from the origin. Due to the identical geometry of the modules, the origin of the system, which is the centre of gravity of the VLFS, is coincident with the centre of gravity of module M3. Table 1 shows the design parameters for a single module. The connector installation position between the modules of VLFS is shown in the Fig. 2. The centre of the connector is located at the centre of the column and at the centre of the upper platform.

Sketch of very large floating structures systems

Location of the connectors of VLFS (dimensions are in mm)
2.2 Design Requirements of the Connectors
The design load of the connector is closely related to its rigidity. If a rigid connector is used, the connector loads, especially vertical and horizontal bending moment, will be very large. In addition, there will be significant fatigue issues. Therefore, an ideal design is that the connector should be flexible with suitable rigidity.
Natural rubber and synthetic rubber exhibit many unique physical and chemical properties. They have high mechanical strength and energy absorption characters. Some rubbers are also wearing and corrosion resistant in various environments. Therefore, the connectors are designed as a combination of high-strength steel and rubber. Rubbers provide flexibility and damping.
In this article a simple flexible hinge connector was studied, consisting of single and double ears and bolts. The rubber mats in the double ears not only fix the displacements but also absorb impaction with a flexible connector, as shown in the Fig. 3, where the double ears are coloured with blue, while the single ear is in pink. The white area denotes the bolt surrounded by green rubber mats.

Concept of flexible connector
The hinged flexible connector contains a base, an articulated ring, a latch and a rubber ring. Consistent with the coordinate system of the super large floating body, the right-handed rectangular coordinate system is defined at the connector. Considering the location of the connectors, the origin of the coordinates is at the centre of the rings, with the x-axis pointing from double ears to the single ear, the y-axis pointing to the left side, and the z-axis pointing vertically upwards. The six degrees of relative freedom of the very large floating body module are surge (DX), sway (DY), heave (DZ), roll (RX), pitch (RY), and yaw (RZ). Due to the reduction in the vertical bending moment, constrains of articulated flexible connectors are assumed that DX, DY, and DZ are not rigid, RX and RZ are determined through three axis directional constraints, and RY is released, as shown in Table 2.
3 Design of Connectors
3.1 Basic Properties of the Connectors
The 3D potential theory was employed to calculate the responses and loads between modules. The rigid module and flexible connectors (RMFC) models were used to obtain the loads of connectors. Figure 4 shows the hydrodynamic grids of a single module with five transverse pontoons.

Hydrodynamic panels of single module with five transverse pontoons
The analysis on loads and responses of the hinged connector was carried out using the five-module VLFS. Each module has 5 horizontal pontoons beneath the water surface. Using RMFC method, the maximum loads of the connector C4 under different wave angles is shown in the Figs. 5 and 6 and listed in Table 3. When the wave angle is less than 60°, the connector loads, and module motion responses are small without much change with the wave angle. Also, the longitudinal load Fx is less than 40 MN, which can be used as the working load of the connectors. The connector loads and the module motion are changed sharply with the wave angle from 60° to 90°. The maximum longitudinal load can reach nearly three times of the working load, which is the extreme load to be avoided in the design. Consequently, the longitudinal loads were applied to design the details of the connectors due to lower values of horizontal and vertical loads.

Maximum forces of the connector under different wave angles

Maximum moments of the connector under different wave angles
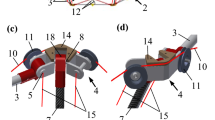
According to the loads and responses of connectors of VLFS, articulated connectors are designed in detail based on the conceptual picture as shown in the Fig. 7. It mainly consists of single ear, double ears, bases and bolt. The main parameters are shown in Table 4.

3D views of flexible connector of VLFS in full scale (dimensions are in mm)
3.2 Material
Mild steel properties (with Young’s modulus of 2.0 × 1011 N/m2, density of 7850 kg/m3, Poisson’s ratio of 0.3) and yield strength of 235 MPa were applied to bases, single ear, double ears and bolt. The inner surface of the hollow cylinder contained a circular rib between the single and the two ears. Such structure was adopted to reduce the weight and to guarantee that the connector would fail prior to the module and the base at the limit states.
3.3 Modelling in Finite Element Analysis
The finite element analysis (FEA) software ANSYS was used to calculate the strength of the full-scale connector structures. The SOLID186 element was used to model the connector’s rings, varying sectional latch. The TARGE170 and CONTA174 elements were used to simulate the target surface and contact surface by surface-surface contact. In this situation, the inner surfaces of ears are deemed to be target surfaces and the outer plane of the bolt is the contact surface. The finite element model of the three-ring connector with hollow bolt is shown in the Fig. 8, while the connector with ring-stiffened is shown in the Fig. 9. In terms of constrains, the two-ear base surface was rigidly fixed. The single-ear base surface used the MPC184 multi-point restraint. Two identical connectors were arranged at the upper platform of VLFS, with a 25% safety factor. Therefore, the x-axis direction applied load is 5.0 × 107 N.

FEM of connector without ring-stiffened cylindrical shell

FEM of connector with ring-stiffened cylindrical shell
4 Strength Results
The Von Mises stress distributions of longitudinal section of the full-scale connector with varying stiffeners heights such as 0 mm, 50 mm, 100 mm and 20 mm are shown in the Fig. 10.

Von Mises stress of the longitudinal section of connector with ring-stiffened cylindrical shell (a) 0 mm, (b) 50 mm, (c) 100 mm, (d) 200 mm
According to the FEA results, there are some phenomenon listed as follows.
(1) With the ring-stiffened in hollow cylinder, the connector has smaller deformation and von Mises stresses. The maximum displacements of the connector system are 1.949 mm, 1.836 mm, 1.796 mm and 1.469 mm in Figs. 10(a)–(d) respectively, while the maximum von Mises stresses are 204 MPa, 157 MPa, 136 MPa and 132 MPa. Under the same tensile loads, in comparison with the connector bolt with strength structures, the distortion without circular rib is closely 33% larger and stresses are 55% bigger.
(2) With the same pin diameter and the thickness, the minimum stresses of the three-ring connector without strengthen are smaller than those with ring-stiffened, as seen from Fig. 10. It indicates that the circulate ribs have the ability of load balance to eliminate the stress concentration.
(3) The maximum deformation and stresses appear in the area of the gap between double ears and single ear due to the shear failure mode.
(4) The strengths analysis of connectors of VLFS shows that the stresses meet the strength requirements if the connector attached with circulate ribs.
5 Conclusions and Discussion
Based on the loads calculated by the rigid module flexible connector model, the connector structures of the VLFS are designed to be suitable for the application and service. The mechanical model of the flexible connector was modelled using FEA. Through the comparison of the numerical simulation results, the following conclusions are drawn:
(1) According to the load prediction and the preliminary design dimensions, the diameter of the bolt and the thickness of the ears could be determined. A proper size can minimize the stress level. Even if a hollow connector is used, as long as the corresponding principal particulars of connectors and the material parameter are optimised, it will also have the effect of reducing the stresses but not significantly increasing the weight.
(2) The thickness of the hollow bolt should be met with the thickness of the single and double ears. If the thickness of the pin is too small, the structures will fail easily under extreme deformation and stress. Of course, if the thickness of the bolt is sufficiently large, the system of the connector will have large masses.
(3) Using a flexible connector with a rubber ring can reduce the stiffness without significantly increasing the stresses. Therefore, surrounded by the rubber, the hollow connectors not only satisfy the dynamic characteristics of very large floating body, but also achieve the safety and reliability of the connection between modules.
References
Wu, Y.S.: Hydroelasticity of Floating Bodies. Brunel University, UK (1984)
Ertekin, R.C., Riggs, H.R., Che, X.L., et al.: Efficient methods for hydroelastic analysis of very large floating structure. J. Ship Res. 37(1), 58–76 (1993)
Riggs, H.R., Ertekin, R.C., Mills, T.R.J.: Wave-induced response of a 5-module mobile offshore base. Mar. Struct. 13, 217–232 (2000)
Yu, L.: Study on dynamic responses of connectors of mobile offshore base. Shanghai Jiaotong University (2004)
Qi, E.R., Song, H., Lu, Y.: Study on dynamic response of flexible connectors of very large floating structures. J. Ship Mech. s1, 209–217 (2017)
Qi, E.R., Liu, C., Xia, J.S., Lu, Y., et al.: Experimental study of functional simulation for flexible connectors of very large floating structures. J. Ship Mech. 19(10), 1245–1254 (2015)
Zhang, B., Qi, E.R., Lu, Y.: Influence of module number on dynamic responses of very large mobile offshore base. J. Ship Mech. 17, 49–55 (2013)
Liu, C., Qi, E.R., Lu, Y.: Dynamic response of connectors of very large floating structures under shallow draft. J. Ship Mech. 5, 581–590 (2014)
Xu, D.L., Xia, S.Y., Zhang, H.C., Wu, Y.S.: Adaptive optimal control of multi–modular floating platforms in random seas. Nonlinear Dynamic, 1–14 (2017)
Zhu, X., Liu, C., Qi, E.R., et al.: Design and finite element analysis for very large floating base connector. J. Ship Mech. 11, 1361–1366 (2014)
Lu, Y., Qi, E.R., Liu, C.: Strength assessment on the strength of flexible connectors with several stiffness of very large floating structures. In: Proceedings of the China Steel Construction Society Ocean Steel Structure Branch Association Conference, pp. 117–122 (2015)
Lu, Y., Qi, E.R., Liu, C.: Strength assessment on the keypoint of connectors of very large floating structures. In: Proceedings of the China Steel Construction Society Ocean Steel Structure Branch Association Conference, pp. 80–85 (2016)
Zhou, Y., Wang, Y., Lu, Y., Qi, E.R.: Strength of connectors with varied stiffness for very large floating structures. In: Third International Conference on Safety and Reliability of Ships, Offshore & Subsea Structures, Wuhan (2018)
Acknowledgements
The work was supported by the Ministry of Science and Technology with the research project (Grant No. 2013CB036100 and No.2017YFB0202702), the National Natural Science Foundation of China, PR China (51809241) and the Ministry of Industry and Information Technology with the research project in the fields of high-tech ships ([2016]22).
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Lu, Y., Teng, B., Wang, Y., Zhou, Y., Cheng, X., Qi, E. (2021). Structural Design of Hinge Connector for Very Large Floating Structures. In: Okada, T., Suzuki, K., Kawamura, Y. (eds) Practical Design of Ships and Other Floating Structures. PRADS 2019. Lecture Notes in Civil Engineering, vol 64. Springer, Singapore. https://doi.org/10.1007/978-981-15-4672-3_12
Download citation
DOI: https://doi.org/10.1007/978-981-15-4672-3_12
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-15-4671-6
Online ISBN: 978-981-15-4672-3
eBook Packages: EngineeringEngineering (R0)