
Abstract
A new design of space deployable reflector is presented. In particular, we consider closed-chain system (with central network), which as a result of transformation reaches the conical shape. In conformity with the technical specifications, individual parts of the system perform the simultaneous motion in the radial and axial directions. The main motion of the system produced by geometric constraints is studied, i.e., we consider the degree of structural motion. Parametric degrees of freedom caused by technological errors, modes of motion, types of load or deployment velocity are not taken into consideration at this stage. A peculiar feature of the deployable structure presented in the paper is that, as compared with analogous structures, for connecting the sections with one another there is no need of using synchronization devices in both—upper and lower kinematic chains simultaneously. This structural mechanism is a differential lever mechanism, the driving elements of which enable us to obtain the desired law of motion of every characteristic link. The kinematic model represents the whole system. Therefore, we can construct the function of position of the lever mechanism and also the kinematic functions of transmission. For the preliminary investigation of the structure and making possible changes in it, two mathematical models have been constructed by means of the ANSYS software using the Ansys Parametric Design Language. The degrees of freedom of the hinges are simulated in local coordinate systems and are as much as possible approximated to the real model. Calculations are performed for various kinds of loads and appropriate results are obtained.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The development of new designs of space deployable antenna reflectors is a topic of high interest for spacecraft technologies since many years [1–5]. In this paper, we consider a conical Deployable Antenna Reflector with load-bearing ring structure and central networks.
As for the central part it is not new. It consists of vertical tension ties connecting the lower stabilizing mesh and the upper functional one [6, 7]. In another words back and front networks with triangular cells. We would like clarify, that in the stressed state central part perform the function of supporting structure for Radio Frequency reflective surface (attachment of the Radio Frequency reflective surface to the upper functional mesh do not into consideration).
As a load-bearing ring we have chosen a cone-shaped hinged system with folding rods. A noteworthy feature of the structure is its light weight, which has been achieved thanks to the prior design itself and the optimization of structural components. This means that due to mechanical characteristics and strength reserves of the system, it can be designed with a minimal number of elements and minimal cross-section values.
To equate the kinematic mobility of the ring to one degree, we have invented an original scheme of connection of sections with one another. As a result there is no need of using synchronization devices in both—upper and lower kinematic chains simultaneously and the structure has become quite simple and reliable. For basic variant in this paper, we consider design where synchronization devices (pair of gear-wheels) are mounted only on the lower hinged rod (bar-linkage) chain.
The proposed system is light-weight—8 kg.; rigid in deployed state—basic eigenfrequency is f 1 = 0.52 Hz.; and is characterized by accurate geometrical parameters—total displacements of the nodes for upper functional mesh is in range −0.4 to −0.045, which is the mandatory condition for the reflector structure to have good performance.
In this paper, we also present a design modification that has no synchronization elements and is distinguished by self-synchronization during the process of deployment—however, the details of this point are not developed here since it is the subject of future investigation (please see Fig. 5).
2 General view of the structure and its constituent elements
Transformable reflector structure consists of the following main parts:
-
Load-bearing ring structure;
-
Synchronization mechanism arraigned on the lower part of the structure;
-
Ring deployment mechanism (RDM);
-
The central part (Shown on FEM model; please see chapter 6 Fig. 12).
The proposed load-bearing part of the reflector is consists of upper 1 and lower 2 rings constructed with hinged rod (bar-linkage) kinematic chains of different dimensions (Fig. 1). For their part, the upper and lower kinematic chains are the rods connected by cylindrical hinges. The ends of the folding rods 3 are connected in the circular direction by outermost cylindrical hinges 5 located on the corner brackets 4, whereas the central cylindrical hinges 6 are located directly at the mid-points of the folding rods.

The general view and structural components, showing details I–V for the joints
The upper and lower chains are interconnected by struts 7 with cylindrical hinges 8 (revolute joints) which are located in the central parts of the corner brackets 4. In other words, struts 7 connecting the upper 1 and lower 2 rings are connected to the corner brackets 4 with cylindrical hinges 8 with rotation axis tangential to the rings (Figs. 1a, 2a). Struts have an upper 9 and lower 10 tip projections for joining-up the central and load-bearing parts together.

The main assembled components of the load-bearing ring. a–c For upper ring; d, e for lower ring
For the synchronous deployment of the system it suffices to mount synchronization devices on the lower ring. In our case, the synchronization mechanism consists of a pair of gear-wheels 11 which are installed on the axes connecting the brackets 4 and V-folding rods 3 from the inner side of the reflector. They are rigidly fixed at the ends of the folding rods by means of additional pins (not shown) and rotate together with them (Figs. 1, 2d, e).
Ring deployment mechanism (RDM) consists of an electric motor with a reduction gear 12, a cable-pulley system 13, 14 and a compensation spring with a tension sensor 15. Two deployment cables and pair of motors are used separately for each cinematic chain. Moreover, upper and lower motors have drums 16 of appropriate diameters for winding the required length of cables simultaneously (Figs. 1, 2).
Difference of the proposed RDM, as compared with the existing ones [1, 7] is, that it is not fixed to the struts, but to the main brackets 4. More clearly, main parts of the structure are shown in Fig. 2.
During transformation, the folding rods of each section rotate in the radial direction, simultaneously unfolding in the vertical plane, whereas the struts connecting the upper and the lower rings deflect also in the radial direction. The deployment stages of one section for the standard and the shifted variant are shown in Fig. 3a, b. In the standard case, the upper and lower mid-folding points 6 do not cross, meanwhile in the shifted variant the mid-folding points cross each other in parallel planes. In the case of the shifted variant, the height of the stowed package will be smaller or, accordingly, the number of lateral facets (sections) will be lower for the same height (Fig. 3b).

Deployment stages of one section for the standard and shifted variants (front view deployed and side view during deployment phases)
To obtain a compactly stowed package of the reflector, the rods can be fixed in the vertical position by means of hold-down devices 17 (Fig. 1b).
As to the central part (front and back networks), in our case we use the variant developed in prior works [6, 8]. More exactly, the central part consists of vertical tension ties connecting the lower stabilizing mesh and the upper functional one. This concept itself is not new, as it was first conceived by Miura and co-workers as the Tension Truss [9]. This particular implementation introduces further simplifications to obtain isostatic networks [10]. The networks have triangular cells and are made of reinforced plastic bands. The central part of the upper mesh is identical to the lower one, the only difference being that additional linear bands are used for connecting the upper mesh to the load-bearing ring (please see Fig. 12).
3 Problems of geometrical invariability of one section
Let us consider one lateral facet (section) of the structure with cable-pulley system and electric motors in the fully deployed and stowed states of the structure. First we will consider the problem of geometrical compliance of the section in its plane (Fig. 4a).

The section with synchronization devices on the lower part of the ring (main design). a Deployed state (second gear-wheel in pairs are not shown); b side view of the stowed state
When the transformable reflector structure is in the deployed state, the main brackets 4 are in the horizontal position. Accordingly, the axes passing through the upper and lower hinges X up and X low are parallel to one another and are in the horizontal position, too. The normal X per to the plane of the section is the axis deflecting from the axes X up and X low by an angle α. Therefore, theoretically it can be asserted that section is geometrically stable in its plane and is not necessity in additional stiffness cables (Fig. 4a).
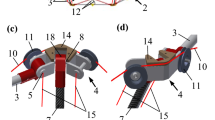
As to the stability of struts in the vertical direction (parallel to the symmetry axis of the reflector) in the absence of synchronization elements (gear-wheels), this is questionable because X up ∥ X low, means that the movement of the struts in the vertical direction is not restricted (Fig. 5a). To solve this problem it is necessary to fulfill the condition X up ∦ X low. For this, the elements of the main brackets located at the strut ends are joined by means of braces 18. The braces incorporate springs 19 and length regulating devices 20.

The section without synchronization devices and subjected to the action of braces (variant for future investigation). a Deployed state; b side view of the stowed state (the braces are not shown)
The tensioning of the paired braces makes the brackets slightly change the angle by rotating in the radial direction. Accordingly, the electric drives, cable-pulley system and V-folding rods together with central hinges, mounted on the brackets, will rotate, too. As a result the condition X up ∦ X low will be satisfied, i.e., the upper and the lower kinematic chains rotate by a small angle from the horizontal plane in the mutually opposite directions (Fig. 5b).
To obtain a compactly stowed package, the rods can be elastically fixed in the vertical position by means of hold-down devices 17 (belts, please see Fig. 1b), i.e., in the stowed position the main brackets will pass to the horizontal position as a result of the extension of braces 18 and the tensioning of springs 19. This provides in addition an initial elastic energy for the start of the deployment, when the hold-down device is released.
The deployment of the system (stowed package) starts right after the release of the hold-down device 17 and, in consequence, the V-folding rods pop out and change insignificantly the angle. During transformation, the tilt of the rods preserves, thereby restricting the movement of the struts in the vertical direction (Fig. 5b). In our opinion, no synchronization elements are needed in that case and the design of the structure becomes even more simplified. The self-synchronization characteristics of this construction can be explained by referring to the literature of overconstrained structural mechanisms [9], although it is not the main subject of this paper.
A breadboard model of a single-ring cone structure with V-folding rods turned inside out has been constructed, which clearly demonstrates the positioning of the rods during transformation (Fig. 6). In presented kinematic chain synchronous folding/unfolding is guaranteed and in contrary of similar variants [11] novelty is that upper parts of the struts are not rigid connected to the corner brackets, but with rotation axis tangential to the ring. Exactly due to this obtained effect is presented in Fig. 5b (V-folding rods are turned inside out).

The single-ring cone structure with brackets and V-folding rods turned inside out where the struts are connected to the upper corner brackets using cylindrical hinges with rotation axis tangential to the ring
It is necessary to mention that development of main and perspective design variants of the load-bearing rings presented in paper (Figs. 4, 5) are based on above-mentioned innovative breadboard model.
The scheme shown in Fig. 5 needs further investigation. Our discussion here is limited to the preliminary study of the main design shown in Figs. 1 and 4.
4 Structural peculiarities of the chain system
The studies performed show that from the standpoint of kinematics and dynamics it is advisable to decrease the degree of mobility of the chain system to an optimal level—this can be done by increasing the number of drives or by installing additional linking devices or using both techniques simultaneously [12].
Let us consider the transformable system with several degrees of freedom. The conditional structural scheme is shown in Fig. 7. It is assumed in the first approximation that system is in equilibrium and the struts move in the transversal direction.

The double-layer kinematic system joined
In the considered scheme, the number of links is n = 15, the kinematic joints with one degree of freedom are p 1 = 18, then the mobility of the movement is w = 9. If this scheme has one driving element with generalized parameter φ then eight degrees of freedom play the role of regulating coordinates (relative coordinates of five links of the lower layer and three connecting struts).
For one section shown in Fig. 8 we obtain n = 5, p 1 = 6, w = 3. In that case, the defining parameters of mechanism position functions will be φ 1, φ 2, φ 3. If φ 1 is the coordinate of the driving element, then φ 2 and φ 3 will be relative regulating coordinates. For the symmetric system φ 1 = φ 3.

The driving chain
If additional links (say, in the form of gear-wheels) are installed in the components A and B of the kinematic scheme, then in the system with three sections and one drive (Fig. 7) there remain six regulating coordinates. Analogously, the system shown in Fig. 8 can be extrapolated to the system shown in Fig. 9, which consists of one driving group (n = 6, p 1 = 8, p 2 = 1, w = 1 and two adjoined groups for which n = 5, p 1 = 7, p 2 = 1, w = 0.

The kinematic scheme of the reduced cone chain system; drive group and adjoined groups
The upper and lower layers have tether transmissions (deployable cables14—Figs. 1, 2 here is not shown) and the lower layer is additionally provided with a gearing mechanism.
More clearly let us to mention that we consider the two-dimensional problem, which at first stage of investigation is quite enough for determination efficiency of the space chain system. Since the strut elements in the real model incline in the radial directions, in case of plane problem attachment of the struts to the upper and lower rings will be rigid (Fig. 9).
As regards the driving group (please see the first section on the drawing), it consists of driving part and nearest adjoined group. To put it differently, we have three adjoined groups, in which nearest to the driving part together with it represent the driving group. Here it should be noted that theoretically drive shaft can be attached to A or B point (bellow we consider second variant).
As regards the mobility of the movement of adjoined groups, it equals (please see last adjoined group on the drawing):
As regards the mobility of the movement of driving part here we have the following variant (Fig. 10).

Drive shaft attached to point B
Sequentially:
Consequently, summation of the expressions (1) and (2) for the driving group we will obtain: n = 6, p 1 = 8, p 2 = 1, and w = 1.
Finally, for driving group w = 1, for adjoined groups w = 0, and for whole system w = 1.
5 Geometry and kinematic analysis of the block scheme of a transformable cone chain structure
We consider the chain system with closed contour, which during transformation continues deploying until it reaches the conical shape. In conformity with the technical specifications, the individual parts of the system perform simultaneous motion in the radial direction. We consider in this study only the main motion of the system produced by geometrical constraints, i.e., we consider only the degrees of structural motion. Parametric degrees of freedom caused by tolerance errors, elastic deformation, or dynamic excitation are not taken into consideration at this stage.
The kinematic analysis of the system is performed for the regular joint of the structural element, which fully reflects the whole system kinematics (Fig. 11). The struts of the mechanism move in radial directions, whereas the V-folding rods are set in motion in the vertical planes by means of spring-actuators and stepper motors.

The kinematic diagram of the section chain system
The initial parameters of the considered structural element are as follows:
-
Number of regular structural groups (number of sections), N;
-
Outer radius of the upper base of the imaginary truncated pyramid, R;
-
Outer radius of the lower base of the imaginary truncated pyramid, r;
-
Height of the imaginary truncated pyramid, H;
-
The tilt of the face of the imaginary truncated pyramid from the plane of bending rods, δ;
-
Lengths of mechanism links—l 1, l 2 and L;
-
Variable parameters of the system R, r, h 1, h 2, δ, γ, β.
As seen from Fig. 11, the structural element is a spatial differential lever mechanism with three relative degrees of freedom. By means of three driving elements we can obtain the needed law of motion of the working components with the desired regulation level. The constant and variable parameters of the considered system satisfy the following geometrical relationships:
where the angles \(\gamma , \beta\) and α 0 are the generalized parameters by means of which we define the function of position of the proposed mechanism. The graph of the parameters functions can be constructed according to a given law of motion of the driving elements of the mechanism.
6 Preliminary structural calculations and possible results
The aim of preliminary research is to study of modes of deformations in case of two different types of mesh attachment to the load bearing ring and selection of the best one.
In our case, we consider two mathematical models:
-
1.
Attachment of central part to the struts (upper and lower ends of the struts);
-
2.
Attachment of central part to the rings (to the main breakers of the upper and lower rings).
Below we introduce geometrical model of the reflector:
The load-bearing ring of the reflector is a frame having the truncated cone shape with an upper and lower rings—6000 and 4480 mm in diameters accordingly; with distance between them 1316.36 mm and with lengths of the struts—1520 mm. The structure is divided into 12 equal parts. Each part is a trapezoidal flat frame made from carbon (carbonplastic) tubular rods. The diameter of the struts and V-fold bars are 12 mm (Fig. 12a).

Geometrical model of the reflector. a Side view; b top views: 1-functional mesh; 2 technological mesh; 3 tension ties; 5 load-bearing ring
As for the central part, it includes a simplified representation of the front and rear networks that belong to the architecture of such reflectors [8]. Due to the conical shape of the ring, the upper mesh, in contrast to the lower one, requires additional circular elements 31–42 and inclined elements 43–54 for attaching to the ring. The inclined elements are 805.04 mm in length, i.e. peripheral cells of the functional mesh have trapezoidal shape (Fig. 12b). Furthermore, the lower ends of the peripheral tension ties are directly fastened to the lower ends of the struts (or main breakers) (Fig. 12a). This might lead to unwanted shifts.
For the preliminary investigation of the deployed structure and making possible changes in it we have constructed the mathematical models using the ANSYS software using the Ansys Parametric Design Language. The model is based on bar finite elements for the structure. The units of the displacements and forces in FEM are presented in N/m.

Stressed state of the reflector structure (first variant)
Two mathematical models have been created. In the first case, the meshes are fastened to the upper and lower ends of the struts (Fig. 13). In the second case, the meshes are fastened directly to the rings (Fig. 14). The degrees of freedom of the hinges are simulated in local coordinate systems and are as much as possible approximated to the real model.

Stressed state of the reflector structure (second variant)

Stressed state of the upper mesh (first variant)
In the FEM models stressed state of whole structures is obtained due tension of ties (by negative temperatures).
In place of mesh attachment to the struts ends (first variant) axial forces in tension ties are vary in range of 0.25 to 1.23 N. In place of mesh attachment to the main brackets—in range of 0.68 to 1.55 N.
As for extension of lower mesh elements they are tensioned in both variants. In place of attachment to the struts ends axial forces in lower mesh elements are vary in range of 0.98 to 3.95 N. In place of mesh attachment to the main brackets—in range of 2.62 to 4.30 N.
As for extension of upper mesh elements, in place of attachment to the struts ends axial forces in upper mesh elements are vary in range of −0.68 to 3.34 N. In place of mesh attachment to the main brackets—in range of 1.14 to 4.82 N (Figs. 15, 16).

Stressed state of the upper mesh (second variant)
As for node’s displacements for lower mesh, in place of attachment to the struts ends they are vary in range of −0.029 to 0.60 mm. In place of mesh attachment to the main brackets—in range of −0.02 to 0.30 mm.
As for node’s displacements for upper mesh, in place of attachment to the struts ends they are vary in range of −0.58 to −0.043 mm. In place of mesh attachment to the main brackets—in range of −0.40 to −0.045 mm (Figs. 17, 18).

Node’s displacements in upper mesh (first variant)

Node’s displacements in upper mesh (second variant)
Let’s present the results of the calculations as Table 1.
At the final stage of our structural calculations, we define natural oscillation frequencies and shapes of the proposed structures. Appropriate masses are applied to the upper and lower main brackets, while one of the struts is used for fastening.
The Table 2 below contains the first five numerical eigenfrequencies values for both variants.
Investigation of the stressed-deformed states of the structures shows that to reduce unwanted shifts and rotations to a minimum it is better to fasten the meshes directly to the rings (to the main brackets).
The obtained results prove that in the second variant all elements of the upper and lower meshes are tensioned, the displacements of the nodes of the central part are less and whole structure is more rigid (first eigenfrequencie—0.5172 Hz.). Consequently, the advantage has the second variant.
Here it must be noted that for selected variant, strut’s tip projections 9 and 10 are not necessary (please see Figs. 1, 2) and further appropriate changes in structure would be made.
7 Conclusions
A new design of a closed-chain deployable reflector structure is presented, based on V-folding rods. It is an evolution of prior designs demonstrated previously [6]. The kinematics of the transformable system has been described using its building blocks and structural analysis is carried out taking into account the character of structural components. The relative degrees of mobility of the system are established, which control the deployment of the sections up to the design position. A law of the process of unfolding is established in conformity with geometrical and kinematic specifications, taking into consideration the degrees of regulation.
A method is proposed for the kinematic analysis of the system that takes into account its properties. The geometry of the block diagram is discussed and the kinematic analysis of the cone transformable system is carried out—the obtained data allow to determine the function of position of the whole system and to evaluate the process of its deployment.
A simplified innovative breadboard model has allowed demonstrating the principles of the kinematic properties for the upper ring. Based on the theoretical analysis, acting on the elements internal forces have been determined. A sufficiently rigid structure in deployed configuration has been created. It has been established that all elements of the networks are tensioned, while displacements are minimal. Therefore, it can be concluded that the structure is efficient in operation and its further investigation inspires confidence and interest.
Future work should focus on the study of self-synchronization for the reduction of complexity and possibly a full-scale demonstrator. Consequently, it is quite conceivable that appropriate changes will be made in the load-bearing part of the reflector structure.
References
Tserodze, Sh., Santiago Prowald, J., van‘t Klooster, C.G.M., Logacheva, E.: Spatial double conical ring-shaped reflector for space based application. In: Proceedings of 33rd ESA Antenna Workshop “Challenges for Space Antenna Systems”, ESTEC, Noordwijk, The Netherlands, 18–21 October 2011
Gantes, C.J.: Deployable structures: analysis and design. WIT Press, Boston (2001)
Puig, L., Barton, A., Rando, N.: A review on large deployable structures for astrophysics missions. Acta Astronaut. 67, 12–26 (2010)
Hanaor, A., Levy, R.: Evaluation of Deployable Structures for Space Enclosures. Int. J. Space Struct. 16, 211–229 (2001)
Pellegrino, S. (ed.): Deployable structures, International Center for Mechanical Sciences, CISM Courses and Lectures No. 412. Springer Verlag, New York (2001)
Tserodze, Sh., Medzmariashvili, E., Tsignadze, N., Tusishvili, O., Santiago-Prowald, J., Baier, H., Scialino, L., Mangenot, C.: The structure of conical reflector with v-fold bar’s deployable ring. In: Proceedings of “Workshop on large deployable antennas”, ESTEC, Noordwijk, The Netherlands, 2–3 October 2012
Tserodze, Sh., Santiago Prowald, J., Gogilashvili, V., Chkhikvadze, K., Tsignadze, N., Chapodze, A., Nikoladze, M.: New design of transformable mechanical cone system with V-folded bars. In: Proceedings of the 2nd International Scientific Conference on Advanced Lightweight Structures and Reflector Antennas, Tbilisi, Georgia, 1–3 October 2014
Santiago Prowald, J., Baier, H.: Advances in deployable structures and surfaces for large apertures in space. CEAS Space J. 5, 89–115 (2013)
Miura, K., Miyazaki, Y.: Concept of the Tension Truss Antenna. AIAA J. 28(6), 1098–1104 (1990)
Rodrigues, G., Such‐Taboada, M., Datashvili, L., Tsignadze, N., Medzmariashvili, E., Santiago‐Prowald, J.: Isostatic cable net for large deployable antenna reflector. In: Proceedings of “Workshop on large deployable antennas”, ESTEC, Noordwijk, The Netherlands, 2–3 October 2012
Qi, X., Deng, Z., Li, B., Liu, R., Guo, H.: Design and optimization of large deployable mechanism constructed by myard linkages. CEAS Space J. 5, 147–155 (2013)
Levitski, N.I.: Theory of machines and mechanisms, p. 592. Nauka, Moscow (1990). (in Russian)
Author information
Authors and Affiliations
Corresponding author
Additional information
This paper is based on a presentation at the 2nd Int. Scientific Conference on Advanced Lightweight Structures and Reflector Antennas, October 1–3, 2014, Tbilisi, Georgia.
Rights and permissions
About this article

Cite this article
Tserodze, S., Prowald, J.S., Gogilashvili, V. et al. Transformable reflector structure with V-folding rods. CEAS Space J 8, 291–301 (2016). https://doi.org/10.1007/s12567-016-0125-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12567-016-0125-5